机械原理第2章机构的结构分析(机构的组成原理和机构类型综合11
- 格式:ppt
- 大小:5.00 MB
- 文档页数:89

第二章机构的结构分析§2-1机构结构分析的内容及目的§2-2机构的组成§2-3机构运动简图§2-4机构具有确定运动的条件§2-5机构自由度的计算§2-7平面机构的组成原理、结构分类及结构分析§2-6计算平面机构自由度时应注意的事项§2-1机构结构分析的内容及目的主要内容及目的是: ■研究机构的组成及机构运动简图的画法;■ 了解机构具有确定运动的条件;■研究机构的组成原理及结构分类。
§2-2机构的组成1・构件任何机器都是由许多零件组合而成的。
零件是机器中的一个独立制造单元体; 构件是机器中的一个独立运动单元体。
从运动来看,任何机器都是由若干个构件组合而成的。
2.运动副运动副是两构件直接接触而构成的可动连接;运动副元素是两构件参与接触而构成运动副的表面。
例2・1轴与轴承、滑块与导轨、两轮齿啮合。
活塞连杆头连杆体齿轮(1) 运动副的分类 1)按其引入的约束数目分:1级副、II 级副、……V 级副。
2)按其接触形式分]咼副:点、线接触的运动副 低副:面接触的运动副转动副(回转副或较链)运动副还可分为平面运动副与空间运动副两类。
・►3) 按其相对运动形式分\移动副 螺旋副(2)运动副符号运动副常用规定的简单符号来表达(GB4460 — 84)。
各种常用运动副模型常用运动副的符号表3.运动链构件通过运动副的连接而构成的相对可动的系统。
闭式运动链(简称闭链)开式运动链(简称开链)平面闭式运动链空间闭式运动链平面开式运动链空间开式运动链@ A4.机构具有固定构件的运动链称为机构o机构中的固定构件。
一般机架相对地面固定不动,但当机构安装在运动的机械上时则是运动的O原动件——按给定已知运动规律独立平面較链四杆机运动的构件;常以转向箭头表示。
从动件机构中其余活动构件。
其运动规律决定于原动件的运动规律和机构的结构及构件的尺寸。
机构常分为平面机构和空间机构两类,其中平面机构应用最为广泛。
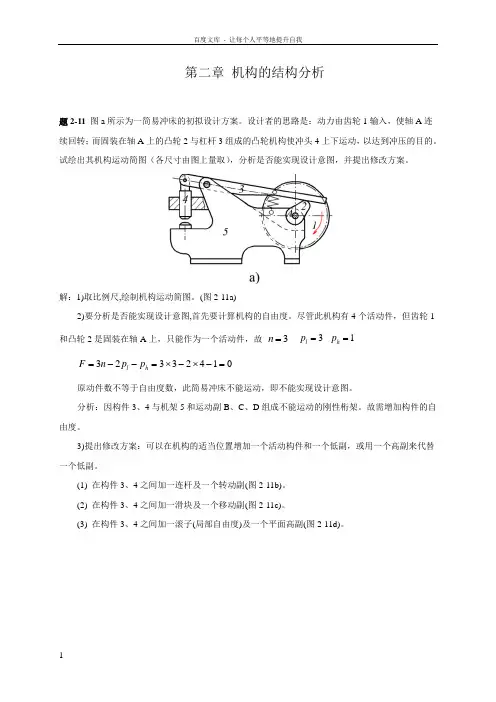
第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。