四自由度气动机械手概要
- 格式:doc
- 大小:579.50 KB
- 文档页数:20
四自由度机械手(上半部分)作为现代工业制造领域中,机器人与自动化领域的核心产品之一,机械手在制造业中扮演着不可替代的角色。
而四自由度机械手便是机械手领域中的重要成员,本文将对其进行详细介绍。
一、四自由度机械手的概念及基本结构四自由度机械手是指由四个自由度的运动副组成的机械手。
其自由度主要分为旋转自由度和直线自由度两种。
旋转自由度可分为绕x、y、z三个轴向旋转自由度,直线自由度可分为x、y、z三个轴向作直线运动的自由度。
四自由度机械手的基本结构由支撑结构、底座、轴承系统、导轨系统、执行器等组成。
其中,支撑结构设在机械手的底部,通过轴承系统与机械手执行器连接,控制机械手的运动方向和范围。
二、四自由度机械手的优缺点四自由度机械手相对于其他机械手类型具有如下优点:1、机械手可根据特定要求进行定制,能够实现弯曲、旋转、伸缩等多种动作,可以适用于较多的工程需求;2、在承载重量较小的情况下,四自由度机械手的成本较低;3、四自由度机械手具有很高的操作精度,可适用于许多需要高精度的操作领域。
但四自由度机械手也有以下缺点:1、四自由度机械手的承载能力较低,仅适用于承载较小的物品;2、机械手无法实现多种操作综合编程。
三、四自由度机械手的应用四自由度机械手在工业制造和自动化生产中具有广泛的应用领域。
其适用于自动化加工、搬运、堆垛、组装、分拣等方面。
在以下几个方面有具体的应用:1、电子工业:四自由度机械手可用于电子元器件的组装、焊接、拆卸等操作。
2、汽车工业:在汽车制造中,四自由度机械手主要用于焊接、装配、喷漆等自动化生产环节。
3、食品加工业:四自由度机械手可用于食品加工中,如包装、封箱等生产步骤。
4、医疗产业:机械手的高精度使其非常适合在医疗领域中用于外科手术等领域中。
总结:四自由度机械手作为机械手领域的成员之一,可用于电子制造、汽车工业、食品加工和医疗行业等领域中的生产流程,并能根据不同的生产需求进行定制和编程。
同时,由于其相对较低的成本和高精度操作的特性,四自由度机械手在现代制造领域中具有重要的应用价值。
机械设计四自由度机器人机器人在现代工业生产中发挥着重要的作用,它能够替代人工完成一些重复性的、危险性的和精确度高的工作。
在众多机器人中,四自由度机器人是一种常见且广泛应用的机器人,它具有较好的灵活性和适用性,能够适应不同工作任务的需求。
四自由度机器人是指机器人系统具有4个运动自由度,即可以在三维空间内进行四种基本运动:平移运动、旋转运动、摆动运动和夹持运动。
这种设计使得四自由度机器人具有更强的机械臂灵活性和适应性,能够完成更多种类的工作任务。
在四自由度机器人的设计中,需要考虑机器人的结构和运动机构的设计。
机器人的结构是指机器人整体的组成和布局,包括机械臂、末端执行器、控制系统等。
通常,机器人的结构应该具备轻便、稳定和易操作的特点,以保证机器人在工作中具有高效性和可靠性。
在机器人的运动机构设计中,需要选择合适的传动机构和电机驱动系统。
传动机构是机器人运动的关键,影响着机器人的运动精度和可靠性。
常见的传动机构包括直线传动、旋转传动等,可以根据具体的工作任务选择合适的传动机构。
另外,电机驱动系统在机器人运动中起到了关键作用,电机的选择和驱动方式根据工作需求确定。
四自由度机器人广泛应用于各个领域,如工业生产、医疗器械、电子产品等。
它可以完成一些重复性的、危险性的和精确度高的工作,提高工作效率和质量。
以工业生产为例,四自由度机器人能够完成装配、焊接、喷涂等工作,取代人工操作,降低了工作强度和安全风险。
总之,四自由度机器人是一种常见且广泛应用的机器人,它具备较好的灵活性和适应性,能够适应不同工作任务的需求。
在机器人的设计中,需要考虑机器人的结构和运动机构的设计,以保证机器人在工作中具有高效性和可靠性。
四自由度机器人在各个领域发挥着重要的作用,提高了工作效率和质量,推动了现代工业的发展。
目录摘要.............................................................. - 1 -1 机械手的基础知识............................................... - 1 -1.1 气动机械手概述 ............................................ - 1 -1.2 机械手的组成 .............................................. - 1 -1.3 机械手的工作原理 .......................................... - 2 -2 机械手的机构设计............................................... - 2 -2.1 气压机械手的示意图 ........................................ - 2 -2.2 机械手自由度的定义 ........................................ - 3 -2.3 机械手气缸的分析 .......................................... - 3 -2.4 机械手爪子的选择 .......................................... - 4 -2.5 机械手手臂的具体设计方案 .................................. - 5 -2.5.1 手臂的伸缩设计....................................... - 6 -2.5.2 手臂的升降设计....................................... - 7 -2.5.3 回转臂的回转设计..................................... - 8 -3 气压回路设计................................................. - 10 -4 机械手的PLC控制设计......................................... - 10 -4.1 PLC的概述................................................ - 10 -4.2 PLC梯形图的程序设计...................................... - 11 -4.2.1 PLC机械手的流程图 .................................. - 11 -4.2.2 PLC机械手的梯形图 .................................. - 12 -致谢............................................................. - 14 -参考文献......................................................... - 15 -气压驱动式四自由度教学仿真机械手设计机电工程学院机械制造与自动化专业朱龙强摘要:本毕业设计的是气压驱动式四自由度教学型仿真机械手,主要包括机械手的总体方案设计、机械手的机械结构设计以及驱动,控制系统设计等,实现了机械手的手臂四自由度运动:手臂的升降、伸缩和回转、手臂的夹紧,设计中分析了教学型机械手的功能要求和实现意义,通过气压缸来实现手臂的升降和伸缩,采用回转气压缸来实现机械手的回转,设计的机械手结构简单,便于操作,在PLC的控制下完成预期的动作,能给学生以直观的印象,达到教学演示的目的。
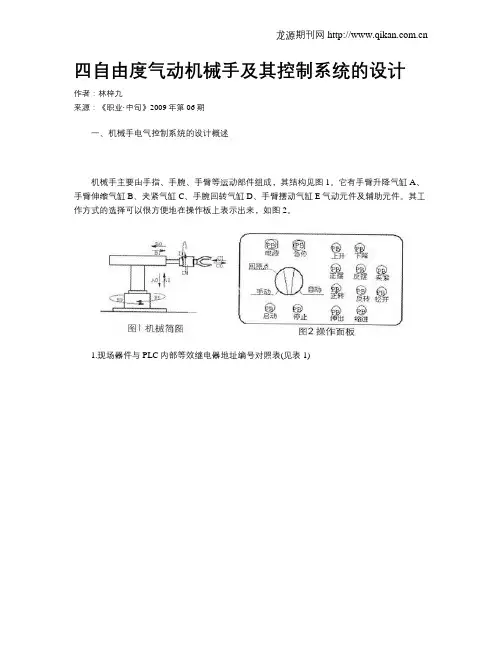
四自由度气动机械手及其控制系统的设计作者:林梓九来源:《职业·中旬》2009年第06期一、机械手电气控制系统的设计概述机械手主要由手指、手腕、手臂等运动部件组成,其结构见图1。
它有手臂升降气缸A、手臂伸缩气缸B、夹紧气缸C、手腕回转气缸D、手臂摆动气缸E气动元件及辅助元件。
其工作方式的选择可以很方便地在操作板上表示出来,如图2。
1.现场器件与PLC内部等效继电器地址编号对照表(见表1)2.动作顺序执行表该机械手的控制要求:手动启动后,能从第一个动作开始自动延续到最后一个动作,动作顺序见表2。
3.可编程控制器的选型由系统的输入输出选择可知,输入信号全部为开关量以“三菱”FX0N-40MR型可编程控制器为例,其输入点为24点,输出点为16点,继电器输出方式,电源为AC100~240V,50/60HZ,可直接采用原控制电源AC 24V,满足要求。
二、程序设计1.系统的组成操作系统包括回原点程序、手动单步操作程序和连续操作程序,如图4。
(1)回原位程序如图 5所示。
用S10~S14作回零操作元件。
应注意,当用S10~S19作回零操作时,在最后状态中在自我复位前应使特殊继电器M8043置1。
(2)手动单步操作程序如图6 所示。
(3)自动操作程序如图7所示。
当机械手处于原位时,按启动X0接通,状态转移到S20,驱动上升Y0,当到达上限位使行程开关X1接通,状态转移到S21,而S20自动复位。
S21驱动Y1手臂正摆,当到达正摆限位使行程开关X2接通,状态转移到S22,驱动Y2手臂伸出,当到达伸出限位使行程开关X3接通,状态转移到S23,驱动Y3置位夹紧,延时1秒,以使电磁力达到最大夹紧力,同时夹紧指示灯亮。
当T0接通,状态转移到S24,驱动Y4手腕正转,当转到正转限位,X4接通,状态转移到S25,驱动Y3复位放松,夹紧指示灯灭,电磁力放松,为了使电磁力完全失掉,延时1秒。
延时时间到,T1接通,状态转移到S26,驱动Y5手腕反转, X5接通,状态转移到S27,驱动Y5 手臂反摆。
四自由度多用途气动机器人结构设计及控制实现首先,四自由度多用途气动机器人的结构设计包括机器人的机械结构和气动元件的选择。
机械结构应尽量简单、紧凑,以减少机器人的体积和重量。
同时,机械结构应该能够实现机器人的各种运动,如平移、旋转和弯曲等。
为了实现这些运动,可以采用链式结构或并联结构。
链式结构由多个连接件组成,通过连接件的运动实现机器人的运动。
并联结构由多个执行器和驱动器组成,每个执行器驱动机器人的一个运动自由度。
气动元件的选择应根据机器人的需求和工作环境来确定,常用的气动元件有气缸和气动执行器等。
气动元件具有体积小、重量轻、响应快等优点,适合用于多自由度机器人的驱动。
其次,四自由度多用途气动机器人的控制实现包括机器人的运动规划和运动控制。
机器人的运动规划是指确定机器人在工作空间中的轨迹和姿态。
一般可以通过运动学模型和逆运动学模型来实现机器人的运动规划。
运动学模型描述了机器人的姿态和轨迹之间的关系,逆运动学模型则反过来计算机器人的关节角度和末端姿态。
运动控制是指控制机器人按照规划的轨迹和姿态进行运动。
控制方法可以采用开环控制或闭环控制。
开环控制是通过预先设定的轨迹和姿态来控制机器人的运动,闭环控制则通过传感器反馈来调整机器人的运动。
根据机器人的需求和控制精度要求,可以选择适合的控制方法。
综上所述,四自由度多用途气动机器人的结构设计和控制实现是一个相互关联的过程。
机械结构应能够实现机器人的各种运动,气动元件的选择应根据机器人的需求和工作环境来确定。
机器人的运动规划和运动控制则是必不可少的,可以通过运动学模型和逆运动学模型来实现机器人的运动规划,通过开环控制或闭环控制来实现机器人的运动控制。
通过合理的结构设计和控制实现,四自由度多用途气动机器人可以完成各种任务,具有广泛的应用前景。
(机器⼈)4⾃由度关节型机器⼈简介四⾃由度关节型机器⼈设计简介摘要本设计内容为四⾃由度关节型机器⼈,主要对关节型机器⼈的操作臂进⾏系统的设计,机器⼈的末端操作器即⼿指是可替换夹具,操作臂有四个⾃由度,可实现在⼯作空间范围内的物体的转移,⼿⽖⼀次可载荷0.5kg.操作臂的动⼒源为舵机,总共有5个舵机,它们分别控制腰部旋转,⼤臂、⼩臂、⼿腕的摆动,以及⼿⽖张合,本⽂设计的四⾃由度关节型机器⼈可⽤于⼩⼯作空间内完成对⼩质量物体的转移⼯作,同时也可以做为教学机器⼈。
关键词:四⾃由度;操作臂;舵机AbstractThis design is the 4-DOF joint robot, mainly designs on the operate arm system.The ender operator of the robot is usually called paw is a exchangeable clamp. the operator has degrees of freedom. which can transform objects in workspace. the paw is able to weigh 0.5kg loads each time.It is servo that is the power of operating arm. There are five servo which are used respectively to control waist rolling、big arm、small arm、hand swing and paw opening and closing, the robot can be well applied to transfer the object with light in limited working space. Meanwhile it’s also used as teaching robot.Key words:4-DOF ;operate arm;servo⼀.概述:1.机器⼈定义机器⼈是近年来快速发展的⾼新技术密集的机电⼀体化产品,通常只按照⼈们预定的程序重复⼀些⼈们看似简单的动作,设计⼈员往往只重视机器⼈的功能。

目录1绪论 (1)1.1工业机械手的概述 (1)1.2机械手的组成及分类 (1)1.2.1机械手的组成 (1)1.2.2 机械手的分类 (3)1.3 国内外发展状况 (4)1.4课题主要任务 (5)2机械手的设计方案 (6)2.1机械手的座标型式与自由度 (6)2.2 机械手的手部结构方案设计 (7)2.3 机械手的手臂结构方案设计 (7)2.4 机械手的主要参数 (7)2.5 机械手的技术参数列表 (8)3手部结构的设计 (9)3.1夹持式手部结构 (9)3.1.1手指的形状和分类 (9)3.1.2设计时考虑的几个问题 (10)3.1.3手部夹紧气缸的设计 (10)4手臂伸缩,升降,回转气缸的尺寸设计与校核 (13)4.1 手臂伸缩气缸的尺寸设计与校核 (13)4.1.1 手臂伸缩气缸的尺寸设计 (13)4.1.2 尺寸校核 (14)4.1.3.导向装置 (14)4.1.4 平衡装置 (15)4.2 手臂升降气缸的尺寸设计与校核 (15)4.2.1 尺寸设计 (15)4.2.2 尺寸校核 (15)4.3 手臂回转气缸的尺寸设计与校核 (16)4.3.1 尺寸设计 (16)4.3.2 尺寸校核 (16)5结论 (17)致谢 (18)参考文献 (19)1绪论1.1工业机械手的概述机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。
机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。
因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。
工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
四自由度机械手设计四自由度机械手是指具有四个独立运动自由度的机械手。
它可以在三维空间内进行灵活的运动和操作,广泛应用于工业制造、医疗护理、服务机器人等领域。
本文将从机械结构设计、运动控制系统、应用领域等方面进行论述,介绍四自由度机械手的设计。
首先,机械结构设计是四自由度机械手设计的关键。
通常,机械手由机械臂、末端执行器、关节驱动装置等组成。
在设计机械臂时,需要考虑结构的刚度、轻量化和尺寸设计等因素。
关节驱动装置可以采用电机驱动、气动驱动或液压驱动等方式,根据具体应用场景选择不同的驱动方式。
末端执行器是机械手最重要的部件之一,其设计要充分考虑操控对象的形状、尺寸和质量等要素。
其次,运动控制系统是确保机械手运动精度和灵活性的关键。
四自由度机械手通常采用闭环控制系统,通过传感器实时反馈机械手的位置、速度和力等信息,通过控制器计算控制命令,控制机械手的运动。
在控制系统设计中,需要考虑传感器的精度、控制器的计算能力和控制算法的设计等因素。
常见的控制算法有PID控制、模糊控制和自适应控制等。
最后,四自由度机械手应用领域广泛。
在工业制造中,机械手可以替代人工完成重复性、危险性和高精度的任务,如焊接、装配和搬运等。
在医疗护理领域,机械手可以用于手术助力、康复训练和辅助生活等。
在服务机器人领域,机械手可以用于家庭服务、餐厅服务和残疾人辅助等。
随着无人驾驶技术的普及,机械手还可以用于车辆维修保养和物流配送等场景。
总之,四自由度机械手的设计涉及机械结构、运动控制系统和应用领域等多个方面。
通过合理设计机械结构,构建高刚性、轻量化的机械手。
运动控制系统的设计保证机械手的运动精度和灵活性。
各个应用领域广泛使用四自由度机械手,提高生产效率和人类生活质量。
随着科技的不断进步,四自由度机械手在未来的应用前景将会更为广阔。
摘要在企业产品的生产过程中,生产线趋向自动化得到广泛的应用,这是在科学研究的不断发展的情况下,人们迫切地希望能有一种安全、灵活、精确的机构,能代替人力进行工件的移动和定位。
机械手的出现让人们解决了这一问题。
特别是一些技术,如气动、液压的不断成熟,是在随着机械结构的优化之后,以及在控制元件的研发和控制方式方面,进行不断改进和创新,机械手的有关各种功能得到了明显的提升与改善。
由于现在社会上出现了机械手,让工人们在劳动时的强度和难度降低了,同时也让企业的工作效率和产品的质量提高了,并且大大的将生产成本降低了。
首先,本文对机械手在国内、海外的研发进展情况进行了研究,并且对于目前几种不同的机械手有了一个认识。
其次根据课题需要,确定了机械手采用圆柱型坐标。
驱动机构采用气压传动机构,通过直线气缸实现手部的开合,机械手的上下、前后运动,而机械手的左右转动是通过回转气缸实现的。
对气缸进行了设计计算与校核。
然后在进行气动回路的设计时,要对在回路中选用的气动元件进行选型。
最后,根据硬件和软件两个方面,将选用的单片机应用在机械手控制电路中,并绘制了运动程序流程图。
关键词:机械手,气压传动,气缸,单片机,电路ABSTRACTWith the development of the science and technology and the application of the automation product line in the production, there is an urgent need of a safe, flexible and accurate mechanism to replace the labor of moving and positioning of work pieces. The application of the manipulator can solve this problem. Along with the optimization of the mechanical structure, the maturity of technology of the pneumatics and the hydraulics, the development of the control element and the continuous improvement and innovation of the control methods, the overall performance of the manipulator has been improved obviously. The manipulator in the difficulty to reduce labor intensity, to increase the efficiency and quality, and to reduce production costs has made outstanding contributions.This paper describes the oversea and domestic development of the manipulator and current classification of the manipulators.Subsequently, I adopt the manipulator with the cylindrical coordinates are based on the project needs. Furthermore, the pressure transmission was selected to be the driving mechanism. In details, the hand clamping is achieved through the linear air cylinder, and the movement of the up and down, forward and backward of the manipulator, is achieved by swing of the air cylinder rotation about the manipulator. At the same time, the design of the cylinder was calculated and checked. Then the pneumatic circuit design and the type selection of the pneumatic components are implemented. Finally, the application of the micro-controller in the manipulator control system is designed from the hardware and the software. I design the control circuit, and draw the flow chart of the program.Key words: manipulator, pneumatic transmission, cylinder, single chip microcomputer, circuit目录1绪论 (1)1.1课题的背景及意义 (1)1.2国内外机械手研究概况 (2)1.3本课题的设计要求 (4)2机械手的机械部分设计 (5)2.1 机械手整体设计 (5)2.2 手爪的设计 (5)2.3 小臂升降的结构设计 (11)2.4 大臂伸缩的结构设计 (13)2.5 大臂升降的结构设计 (18)2.6 手臂回转的结构设计 (23)2.7 推料小臂的设计 (25)2.8 电机的计算与选型 (27)3机械手的气动部分设计 (29)4机械手的控制系统设计 (31)4.1 单片机的选型 (31)4.2 机械手的运动控制模块设计 (32)4.3 软件流程图以及编程 (34)4.4 控制硬件电路设计 (38)5结论 (39)6参考文献 (40)7致谢 (41)1绪论在机械系统中,机器人技术使其实现了机电一体化的自动化技术,是通过了运用电子信息技术,在学校对理工科的本专科教育中,机器人技术有着至关重要的地位,对于用来提升学生的工程能力,拓展思维空间有着举足轻重的意义。
4自由度机械手设计机械手是一种用于配合工业生产的机械装置,它通过模拟人类手臂的运动来进行各种操作。
在工厂生产线上,机械手能够替代人类完成一些重复性、精确性要求高的工作,提高了生产效率和产品质量。
在设计机械手时,需要考虑到其自由度,即机械手能够自主调节其位置和姿态的能力。
在本文中,将讨论一个具有4自由度的机械手设计。
在机械手的设计中,自由度是一个重要的设计参数。
自由度决定了机械手可以进行的运动方式和工作范围。
一个具有4自由度的机械手可以进行四种独立的运动,包括平移和旋转。
在这种机械手设计中,通常会将其运动分为基座运动、肩膀运动、肘部运动和腕部运动。
基座运动是指机械手在水平方向上进行的运动。
在这种设计中,可以使用一个转动关节实现机械手在平面上的旋转。
通过控制转动关节的角度,机械手可以改变其朝向和工作范围。
肩膀运动是指机械手在垂直方向上进行的运动。
在这种设计中,可以使用一个副地方转动关节实现机械手在垂直方向上的旋转。
通过控制转动关节的角度,机械手可以实现上下移动。
肘部运动是指机械手在前后方向上进行的运动。
在这种设计中,可以使用一个副地方转动关节实现机械手在前后方向上的旋转。
通过控制转动关节的角度,机械手可以实现前后伸缩。
腕部运动是指机械手末端执行器的运动。
在这种设计中,可以使用一个转动关节实现机械手末端执行器的旋转。
通过控制转动关节的角度,机械手可以实现执行器的转动。
在设计机械手时,需要考虑到其机械结构、传动机构和控制系统等方面的问题。
机械结构的设计需要考虑到机械手的稳定性、刚度和重量等因素。
传动机构的设计需要考虑到机械手的精度、速度和可靠性等方面的要求。
控制系统的设计需要考虑到机械手的运动轨迹规划、力控制和位置控制等方面的问题。
总结来说,一个具有4自由度的机械手设计需要考虑到其基座运动、肩膀运动、肘部运动和腕部运动等方面的设计问题。
在设计过程中,需要综合考虑机械结构、传动机构和控制系统等方面的要求,以满足机械手在工厂生产线上的工作需求。
摘要针对数控车床设计的一种套类零件自动上下料机构,实现了坯料的抓取、自动定位、夹紧以及工件的回放。
该机构主要由自动安装夹具,坯料、工件拾取机械手,动力及控制系统组成。
零件的自动定位、夹紧由弹簧涨胎心轴实现,涨胎心轴是以工件的内孔表面定位,由气缸驱动弹性筒夹向外扩涨,实现工件的定位和夹紧的。
坯料、工件的拾取、回放是由单臂形式的机械手通过伸缩、旋转以及俯仰等运动实现的,这些运动均由气缸驱动获得。
本设计中,为实现工件的自动上下料,单臂机械手的运动与涨胎心轴的张合需进行紧密配合。
考虑到所夹持工件的实际尺寸、质量等因素,本机构采用气动夹具、电气控制实现了坯料和工件的拾取、安装、回放过程的自动完成。
本文对气动机械手进行总体方案设计,确定了机械手的坐标形式和自由度。
同时,设计了机械手的夹持式手部结构。
关键词:自动上下料;气动机械手;气动夹具;套类零件IAbstractThi s paper is aim ed at desi gn i ng a sl eeve part s aut om ati c bai ti ng a genci es for a C NC l athe.It s func t ion is process i ng the crawls, aut om ati c pos it ioning and cl amping of t he workpi ece.The aut om at i c bait i ng agenci es m ainl y con si st of t he autom at i c fixt ure, the m ani pul at o r for pi ck ing up t he workpi ece and bi ll et s and t he dri ve and cont rol s ys t em.Am ong t hem,the aut om at i c pos it i oni ng and cl am p ing of t he s ets part s i s achi eve d b y t he axi s fet al heart rat e ris ing t o t he workpi ece cent eri ng hol e.W hen cl am pi ng t he workpi ece,fl ex ibl e tube fol der can cent er and cl am p t he c yli ndri cal hol e through t he expansi on and i n fl a ti on;bl ank gras p ing of t he workpi ece and the i nt ervals are achi eve d b y t he m anipul at or arm b y st ret chi ng and rot at ing.In t h e i ssue,i t i s neces s ar y for t he movem ent s of t he m anipul at or arm and the autom at i cal fixt ure Zhang t o requi re t he coordi nat i on.Taki ng int o account that t he actual workpi ece siz e,t he quali t y and t he vari ous feat ures of t he dri ven approach t o the s yst em,we deci de to adopt t he aerod ynam i c cont rol,us i ng com pressed ai r t o achi eve t he movem ent s of t he cl am pi ng fixt ure and m ani pul at or.Keyw ord s:Aut om at i c b ait i ng;P neum ati c m ani pul at or;P neum ati c fixt ure;sl eeve part sII目录摘要............................................................ 错误!未定义书签。
本产品是四自由度机械手。
开发本产品是为了替代人们在生产中没有技术要求的重复工作,将把人从枯燥和重复的工作中解放出来,还可以提高工作效率。
本产品可进行四个自由度的运行,用其可进行物体的搬运,器件的安装,战略抢险等。
随着现代化工业的发展,工业产品不断更新换代,自动化生产线也在不断更换。
为了能够迅速适应产品的更新,降低生产成本,提高产品在市场上的竞争力,特发明、设计了该四自由度搬运机械手。
在现代工业自动化生产线上,为了实现搬运或放置某种零件,要求机械手能够完成转动一定的角度,移动一定的距离及升降等运动,为了能够满足这些要求,该机械手采用了由四个步进电机驱动、经过齿轮传动或丝杠传动,实现底座的旋转、大臂的移动、小臂的升降和手腕的转动等四个自由度,并在腕部装有夹持器,由直流电动机驱动,完成对零件的夹紧及放松任务。
该机械手的各个动作和状态都由单片机控制,不仅能满足机械手的“手动”、“半自动”、“自动”等操作方式所需的大量按扭、开关、位置检测点的要求,更可以通过接口元件与PC机组成工业局域网,实现网络通信与网络控制。
创新点:1.采用数字编程控制,可实现远程控制。
2.有高度的灵活性和适用性,可通过改变控制程序来改变其运放物体的位置和速度,也可更换不同的夹具来运放不同的物体。
3.可在较恶劣或不便于人工操作的环境中工作。
技术关键:1.各传动元件的传动精度2.各运动部件的定位精度。
3.编程控制程序的严谨性与科学性。
技术指标:θ1=360 θ2=120 θ3=360 L2=125mm.本产品是四自由度机械手。
开发本产品是为了替代人们在生产中没有技术要求的重复工作,将把人从枯燥和重复的工作中解放出来,还可以提高工作效率。
本产品可进行四个自由度的运行,用其可进行物体的搬运,器件的安装,战略抢险等。
设计是利用单片机组成的主机板系统发生控制脉冲,通过步进电机的驱动板电路对机械手的四个步进电机进行驱动主机板系统使用ATMEL公司生产的AT89C51作为控制芯片,利用软件进行步进电机驱动脉冲的分配,通过外扩的可编程并行口8155的口输出,经过驱动板的放大,驱动步进电机,机械手可通过步进电机进行精确的定位,具有了与通用PC机联机的串行通信接口。
目录目录 (1)文摘 (3)Abstract (3)第一章绪论1.1 机械手概述 (4)1.2 机械手的组成和分类 (4)1.2.1 机械手的组成.1.2.2 机械手的分类1.3 国内外发展状况.. (7)1.4 课题的提出及主要任务 (8)1.4.1 课题的提出1.4.2 课题的主要任务第二章机械手的设计方案2.1 机械手的座标型式与自由度 (10)2.2 机械手的手部结构方案设计 (11)2.3 机械手的手腕结构方案设计 (12)2.4 机械手的手臂结构方案设计 (12)2.5 机械手的驱动方案设计 (12)2.6 机械手的控制方案设计 (12)2.7 机械手的主要参数 (12)2.8 机械手的技术参数列表 (12)第三章手部结构设计3.1 夹持式手部结构 (14)3.1.1 手指的形状和分类3.1.2 设计时考虑的几个问题3.1.3 手部夹紧气缸的设计第四章手腕结构设计4.1 手腕的自由度 (18)4.2 手腕的驱动力矩的计算 (19)4.2.1 手腕转动时所需的驱动力矩4.2.2 回转气缸的驱动力矩计算4.2.3 回转气缸的驱动力矩计算校核第五章手臂伸缩,升降,回转气缸的设计与校核5.1 手臂伸缩部分尺寸设计与校核 (24)5.1.1 尺寸设计5.1.2 尺寸校核5 .1 .3 导向装置5 .1 .4 平衡装置5.2 手臂升降部分尺寸设计与校核 (26)5.2.1 尺寸设计5.2.2 尺寸校核5.3 手臂回转部分尺寸设计与校核 (27)5.3.1 尺寸设计5.3.2 尺寸校核第六章气动系统设计6.1 气压传动系统工作原理图 (29)6.2 气压传动系统工作原理图的参数化绘制 (30)第七章机械手的PLC 控制设计7.1 可编程序控制器的选择及工作过程 (31)7.1.1 可编程序控制器的选择7.1.2 可编程序控制器的工作过程7.2 可编程序控制器的使用步骤 (31)7.3 机械手可编程序控制器控制方案 (32)第八章结论 (36)致谢 (37)参考文献四自由度多用途气动机器人结构设计及控制实现机械设计制造及其自动化 2002121130 谢刚指导教师:俞国燕中文摘要:本文简要介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的发展状况。
四个自由度气动机械手结构设计四个自由度气动机械手是一种具有四个独立运动自由度的机械手,常用于工业生产线上的自动化操作。
它采用了气动驱动技术,能够在高速下快速、准确地完成各种复杂任务。
在这篇文章中,将介绍四个自由度气动机械手的结构设计。
四个自由度气动机械手一般由基座、转台、前臂、前臂臂杆以及末端执行器等主要部件组成。
其中,基座是机械手的支撑部分,承载机械手的整体结构;转台是机械手的第一旋转关节,使机械手能够在水平面上进行转动;前臂是机械手的第二旋转关节,使机械手能够在竖直方向上进行旋转;前臂臂杆是机械手的伸缩部分,通过伸缩前臂臂杆,可以使机械手的工作范围更加灵活;末端执行器是机械手的最后一个关节,通过末端执行器可以实现机械手的精确定位和抓取动作。
在四个自由度气动机械手的设计中,需要考虑以下几个方面:结构刚度、重量、精度和可靠性。
首先,结构刚度是机械手设计的重要指标之一、为了保证机械手在高速运动中不产生振动和形变,需要采用合适的结构材料和设计参数,提高机械手的整体刚度。
其次,重量是机械手设计的另一个重要指标。
较轻的机械手可以提高其加速度和速度,使其能够更快地完成任务。
因此,在设计中需要尽量减小机械手的自重,采用轻量化的材料。
第三,精度是机械手设计的关键要素之一、在一些需要高精度定位和抓取的任务中,机械手需要具备较高的精度。
在设计中,需要合理选择驱动器、传感器和控制系统,以确保机械手的精确定位和抓取动作。
最后,可靠性是机械手设计的关键要素之一、机械手在工作过程中需要承受较大的负载和惯性力,因此需要采用可靠的结构和驱动系统,以保证机械手在长时间工作中不发生故障。
总结而言,四个自由度气动机械手的结构设计涉及结构刚度、重量、精度和可靠性等多个方面。
在设计过程中,需要综合考虑这些因素,选择合适的驱动器、传感器和控制系统,以实现机械手的高速、准确和可靠的运动。
这样的机械手在工业生产线上能够提高生产效率,实现自动化操作。
四自由度多用途气动机器人(机器手)结构设计及控制实现近几十年,随着全球科学技术的快速发展和信息化水平不断提高,出于解放劳动力、提高生产效率、经济效益和减少生产成本的目的,很多工业领域开始使用工业机器人进行生产运作。
为了加深对机器人从设计到工业应用具体是怎样实现的,文章先对工业机器人的发展背景进行阐述,再对机器人(机械手)的机构设计进行介绍,其中包括手部、手腕、手臂等的设计,最终利用可编程序控制器对机器人(机械手)进行有效控制,使机器人(机械手)能够正常运作,进而出现在在更多生产企业的工作线上。
机器人(Robot)一词最早出现在国外,二十世纪中后期开始才得到人们的广泛关注,并被人们所熟悉,现如今,在国外,甚至国内有些工厂、企业都可以看得机器人的身影。
现代的工业机器人(机器手)主要有可编程、拟人化、通用性、运用广泛这四个特点。
科学技术的提高和不断创新,使得当今的工业机器人逐渐具备行走、感知、交流等多种能力。
目前,美国和日本在机器人的研发方面处于世界领先水平,对全球机器人的发展最具影响。
绝大多数工业机器人都是由主体、驱动系统和控制系统三个部分组成。
其中主机包括臂部、腕部、手部等,大多数机器人有3-6个运动自由度,文章以下以四个自由度为例进行描述。
机器人(机械手)在工业生产过程中能够代替人做些单调、频繁或者重复率强的长时间工作,但是机器人又不是简单意义上的完全复制了人工的劳务,而是在综合了人的工作性能的基础上再结合了机器人其专有的特长。
机械手是模仿人手和手臂的某些功能,在设置的特定程序下抓取、搬运物件或者操作工具的自动操作装置。
机器人的发展历史经历了一系列阶段,其中机械手则是最早出现的工业机器人,机械手在工业生产中的应用能够有效地减省工人、提高生产效率、降低生产成本、提高产品的品质提升工厂形象,尤其是在某些特殊的环境下,如高温高压、有毒有害、易燃易爆、放射性较大等,机器手得到了广泛的运用。
机器人(机器手)结构设计本次设计的机械手是通用气动上下料机械手,其在工业生产有较为广泛的运用。
目录1绪论 (1)1.1工业机械手的概述 (1)1.2机械手的组成及分类 (1)1.2.1机械手的组成 (1)1.2.2 机械手的分类 (3)1.3 国内外发展状况 (4)1.4课题主要任务 (5)2机械手的设计方案 (6)2.1机械手的座标型式与自由度 (6)2.2 机械手的手部结构方案设计 (7)2.3 机械手的手臂结构方案设计 (7)2.4 机械手的主要参数 (7)2.5 机械手的技术参数列表 (8)3手部结构的设计 (9)3.1夹持式手部结构 (9)3.1.1手指的形状和分类 (9)3.1.2设计时考虑的几个问题 (10)3.1.3手部夹紧气缸的设计 (10)4手臂伸缩,升降,回转气缸的尺寸设计与校核 (13)4.1 手臂伸缩气缸的尺寸设计与校核 (13)4.1.1 手臂伸缩气缸的尺寸设计 (13)4.1.2 尺寸校核 (14)4.1.3.导向装置 (14)4.1.4 平衡装置 (15)4.2 手臂升降气缸的尺寸设计与校核 (15)4.2.1 尺寸设计 (15)4.2.2 尺寸校核 (15)4.3 手臂回转气缸的尺寸设计与校核 (16)4.3.1 尺寸设计 (16)4.3.2 尺寸校核 (16)5结论 (17)致谢 (18)参考文献 (19)1绪论1.1工业机械手的概述机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。
机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。
因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。
工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多自由度,可用来搬运物体以完成在各个不同环境中工作。
1.2机械手的组成及分类1.2.1机械手的组成机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。
各系统相互之间的关系如方框图1所示图1 各系统之间的关系执行机构包括手部、手腕、手臂和立柱等部件。
手部:即与物件接触的部件。
由于与物件接触的形式不同,可分为夹持式和吸附式手在本课题中我们采用夹持式手部结构。
夹持式手部由手指(或手爪)和传力机构所构成。
手指是与物件直接接触的构件,常用的手指运动形式有回转型和平移型。
回转型手指结构简单,制造容易,故应用较广泛。
平移型应用较少,其原因是结构比较复杂,但平移型手指夹持圆形零件时,工件直径变化不影响其轴心的位置,因此适宜夹持直径变化范围大的工件。
手指结构取决于被抓取物件的表面形状、被抓部位(是外廓或是内孔)和物件的重量及尺寸。
常用的指形有平面的、V形面的和曲面的:手指有外夹式和内撑式;指数有双指式、多指式和双手双指式等。
而传力机构则通过手指产生夹紧力来完成夹放物件的任务。
传力机构型式较多时常用的有:滑槽杠杆式、连杆杠杆式、斜面杠杆式、齿轮齿条式、丝杠螺母弹簧式和重力式等。
手腕:是连接手部和手臂的部件,并可用来调整被抓取物件的方位(即姿势)手臂:手臂是支承被抓物件、手部、手腕的重要部件。
手臂的作用是带动手指去抓取物件,并按预定要求将其搬运到指定的位置。
工业机械手的手臂通常由驱动手臂运动的部件(如油缸、气缸、齿轮齿条机构、连杆机构、螺旋机构和凸轮机构等)与驱动源(如液压、气压或电机等)相配合,以实现手臂的各种运动。
立柱:立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。
机械手的立柱因工作需要,有时也可作横向移动,即称为可移式立柱。
机座:机座是机械手的基础部分,机械手执行机构的各部件和驱动系统均安装于机座上,故起支撑和连接的作用。
驱动系统:驱动系统是驱动工业机械手执行机构运动的动力装置调节装置和辅助装置组成。
常用的驱动系统有液压传动、气压传动、机械传动。
控制系统是支配着工业机械手按规定的要求运动的系统。
目前工业机械手的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。
控制系统有电气控制和射流控制两种,它支配着机械手按规定的程序运动,并记忆人们给予机械手的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。
控制系统:控制系统是支配着工业机械手按规定的要求运动的系统。
目前工业机械手的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。
控制系统有电气控制和射流控制两种,它支配着机械手按规定的程序运动,并记忆人们给予机械手的指令信息 (如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。
位置检测装置:控制机械手执行机构的运动位置,并随时将执行机构的实际位置反馈给控制系统,与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置.1.2.2 机械手的分类工业机械手的种类很多,关于分类的问题,目前在国内尚无统一的分类标准。
按驱动装置的动力源,机械手可分为以下的几种:(1)液压式机械手。
这种机械手的驱动系统通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成,这种机器人通常具有很大的抓举能力并且结构紧凑,动作平稳,耐冲击、耐振动,防爆性好,但对制造精度和密封性能要求很高,否则易发生漏油而污染环境。
(2)气压式机械手。
其驱动系统通常采用通常汽缸、气阀、气罐和空压机组成。
特点是气源方便,动作迅速,结构简单、造价较低、维修方便,但难于进行速度控制,并因气压不能太高,固抓举能力较小。
(3)电动式机械手。
电力驱动是目前机械手使用的最多的一种驱动方式。
其特点是电源方便,响应快,驱动力较大,信号检测、传递、处理方便,可以采用多种灵活的控制方案。
驱动电机一般采用交流伺服电机、直流伺服电机和步进电机。
由于电机速度高,通常还须采用减速机构(如谐波减速机构、论析减速机构、滚珠丝杠和多杆机构)。
目前也有一些特制电机直接进行驱动,以简化机构,提高控制精度。
其他还有采用混合驱动的机械手,如液-气混合驱动机械手或电-气混合驱动机械手。
机械手按用途可分为下列几种:搬运机械手;喷涂机械手;焊接机械手;装配机械手;其他用途的机械手。
如航天用机械手,探海用机械手,以及排险作业机械手等。
操作机的位置机构是机械手的重要外形特征,固常用作分类的依据。
图2 机械手的类型操作机本身的自由度最能反应机器人的作业能力,也是分类的重要依据。
按这一分类要求,机械手可分为4自由度、5自由度、6自由度。
1.3 国内外发展状况国外机器人领域发展近几年有如下几个趋势:(1)工业机器人性能不断提高(高速度、高精度、高可靠性、便于操作和维修),而单机价格不断下降,平均单机价格从91年的10.3万美元降至97年的65万美元。
(2)机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。
(3)工业机器人控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。
(4)机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制;多传感器融合配置技术在产品化系统中已有成熟应用。
(5)虚拟现实技术在机器人中的作用已从仿真、预演发展到用于过程控制,如使遥控机器人操作者产生置身于远端作业环境中的感觉来操纵机器人。
(6)当代遥控机器人系统的发展特点不是追求全自治系统,而是致力于操作者与机器人的人机交互控制,即遥控加局部自主系统构成完整的监控遥控操作系统,使智能机器人走出实验室进入实用化阶段。
美国发射到火星上的“索杰纳”机器人就是这种系统成功应用的最著名实例。
(7)机器人化机械开始兴起。
从94年美国开发出“虚拟轴机床”以来,这种新型装置已成为国际研究的热点之一,纷纷探索开拓其实际应用的领域。
我国的工业机器人从80年代“七五”科技攻关开始起步,在国家的支持下,通过“七五”、“八五”科技攻关,目前己基本掌握了机器人操作机的设计制造技术、控制系统硬件和软件设计技术、运动学和轨迹规划技术,生产了部分机器人关键元器件,开发出喷漆、弧焊、点焊、装配、搬运等机器人;其中有130多台套喷漆机器人在二十余家企业的近30条自动喷漆生产线(站)上获得规模应用,弧焊机器人己应用在汽车制造厂的焊装线上。
但总的来看,我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,如:可靠性低于国外产品:机器人应用工程起步较晚,应用领域窄,生产线系统技术与国外比有差距;在应用规模上,我国己安装的国产工业机器人约200台,约占全球已安装台数的万分之四。
以上原因主要是没有形成机器人产业,当前我国的机器人生产都是应用户的要求,“一客户,一次重新设计”,品种规格多、批量小、零部件通用化程度低、供货周期长、成本也不低,而且质量、可靠性不稳定。
因此迫切需要解决产业化前期的关键技术,对产品进行全面规划,搞好系列化、通用化、模块化设计,积极推进产业化进程.我国的智能机器人和特种机器人在“863”计划的支持下,也取得了不少成果。
其中最为突出的是水下机器人,6000m 水下无缆机器人的成果居世界领先水平,还开发出直接遥控机器人、双臂协调控制机器人、爬壁机器人、管道机器人等机种:在机器人视觉、力觉、触觉、声觉等基础技术的开发应用上开展了不少工作,有了一定的发展基础。