武汉工程大学实验报告-数字仿真
- 格式:doc
- 大小:1.89 MB
- 文档页数:42
武汉工程大学实验报告专业 班号 组别 指导教师 姓名 同组者 实验名称 实验日期 第 次实验 一、实验目的1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。
2. 利用MATLAB 语句绘制系统的根轨迹。
3. 掌握用根轨迹分析系统性能的图解方法。
掌握系统参数变化对特征根位置的影响。
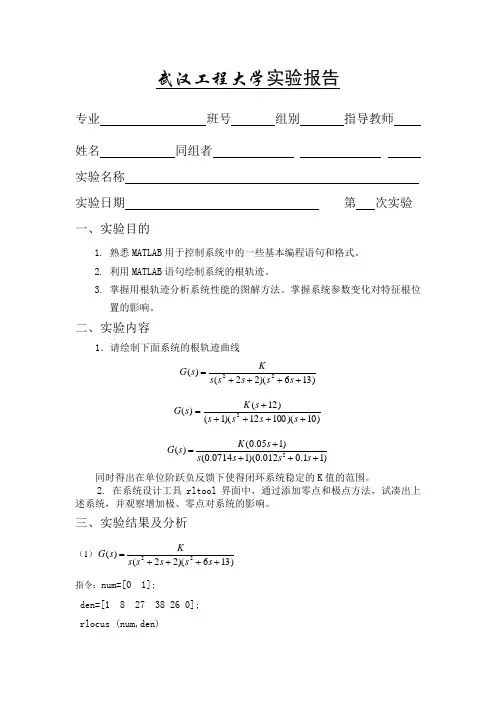
二、实验内容1.请绘制下面系统的根轨迹曲线)136)(22()(22++++=s s s s s Ks G )10)(10012)(1()12()(2+++++=s s s s s K s G 2(0.051)()(0.07141)(0.0120.11)K s G s s s s s +=+++同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。
2. 在系统设计工具rltool 界面中,通过添加零点和极点方法,试凑出上述系统,并观察增加极、零点对系统的影响。
三、实验结果及分析(1))136)(22()(22++++=s s s s s Ks G 指令:num=[0 1];den=[1 8 27 38 26 0]; rlocus (num,den)gridxlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus')-12-10-8-6-4-2246-10-8-6-4-202468100.160.30.460.60.720.840.920.980.160.30.460.60.720.840.920.9824681012Root LocusReal AxisI m a g i n a r y A x i sk =22.7553结论;当0<K<22.7553是系统是稳定的 (2))10)(10012)(1()12()(2+++++=s s s s s K s G指令:num=[1 12]; den=[1 23 242 1220 1000]; rlocus (num,den) gridxlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus')-60-50-40-30-20-10102030-50-40-30-20-10010203040500.840.920.980.160.30.460.60.720.840.920.981020304050600.160.30.460.60.72Root LocusReal AxisI m a g i n a r y A x i sk =1.0652e+003结论:当0<k<1.0652e+003是系统稳定 (3)2(0.051)()(0.07141)(0.0120.11)K s G s s s s s +=+++指令:num=[0.05 1];den=[0.0008568 0.01914 0.1714 1 0]; rlocus (num,den) gridxlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus')-60-50-40-30-20-10010203040-60-40-2002040600.140.280.420.560.70.820.910.9751020304050601020304050600.140.280.420.560.70.820.910.975Root LocusReal AxisI m a g i n a r y A x i sk = 7.3546结论:当0<K<7.3546时系统稳定2. 观察增加极、零点对系统的影响:(1)通过添加零、极点凑系统)136)(22()(22++++=s s s s s Ks G :第一步,添加零极点第二步,添加共轭极点-1+j1和-1-j1得到G(s)=1/[s(s 2+2s+2)]第三步,添加共轭极点-3+j2和-3-j2得到G(s)=1/[s(s 2+2s+2)( s 2+6s+13)],凑成系统)10)(10012)(1()12()(2+++++=s s s s s K s G(2)通过添加零、极点凑系统)10)(10012)(1()12()(2+++++=s s s s s K s G按上述步骤完成根轨迹绘制(3)通过添加零、极点凑系统)11.0012.0)(10714.0()105.0()(2++++=s s s s K s G(4)结论:由图知,若添加的合理,会使系统的稳态误差减小,同时若添加的不合理,反倒会使系统不稳定;给系统添加开环零点,可使原来不稳定的系统变成稳定的系统。
大学仿真实验实验报告大学仿真实验实验报告引言:大学仿真实验作为一种重要的实践教学方式,旨在通过模拟真实场景,培养学生的实践操作能力和解决问题的能力。
本文将对大学仿真实验进行详细的实验报告,以展示实验过程和结果。
实验目的:本次实验旨在通过使用仿真软件,模拟一个生产线的运行情况,以了解生产线的工作原理和优化方法。
实验过程:1. 确定生产线的基本参数:包括生产线的长度、每个工位的工作时间和工作效率等。
在仿真软件中,我们可以根据实际情况设置这些参数。
2. 模拟生产线的运行:在仿真软件中,我们可以设置生产线的初始状态,包括产品的种类和数量等。
通过模拟软件的运行,我们可以观察到生产线的整体运行情况。
3. 改变生产线的参数:在仿真软件中,我们可以随时改变生产线的参数,比如增加工位数量、调整工作时间等。
通过观察实验结果,我们可以比较不同参数下生产线的运行情况,并找到最优的参数设置。
实验结果:通过对生产线的仿真实验,我们得到了以下几个结果:1. 生产线的瓶颈工位:通过观察生产线的运行情况,我们发现某些工位的工作时间明显长于其他工位,这些工位往往是生产线的瓶颈。
通过对瓶颈工位的优化,我们可以提高整个生产线的效率。
2. 生产线的平衡:通过调整工位的工作时间和工作效率,我们可以使得生产线的工作更加平衡。
这样可以避免某些工位的负荷过大,提高整个生产线的效率。
3. 生产线的稳定性:通过观察生产线的运行情况,我们可以发现一些不稳定因素,比如工位之间的协调不足、工作时间的波动等。
通过优化这些因素,我们可以提高生产线的稳定性,减少生产线的故障和停机时间。
实验总结:通过本次实验,我们深入了解了生产线的工作原理和优化方法。
仿真实验为我们提供了一个模拟真实环境的机会,使我们能够更好地理解和掌握相关知识。
通过观察实验结果,我们可以得出一些结论,并提出一些建议,以改进生产线的工作效率和稳定性。
建议:基于本次实验的结果和观察,我们提出以下几点建议:1. 加强生产线的协调:在设计生产线时,应考虑各个工位之间的协调性,避免出现瓶颈工位。
一、实验目的本次实验旨在通过数字仿真技术,对线性连续控制系统和非线性环节控制系统进行仿真分析,验证控制系统的性能和稳定性,并加深对控制系统理论的理解。
二、实验环境1. 软件环境:MATLAB R2020a、Simulink2. 硬件环境:计算机三、实验内容1. 线性连续控制系统的数字仿真(1)系统描述本次实验选取两个线性连续控制系统,分别为G(S) = 10/S(S+1)和G(S) = 4/S^2 2.828S。
(2)参数设置输入信号:阶跃信号,阶跃时间:0;初值:0;终值:1迟滞环节:迟滞时间:0开环传递函数:G(S) = 10/S(S+1),G(S) = 4/S^2 2.828S反馈环节传递函数:H(S) = 1(3)仿真结果与分析通过Simulink对两个系统进行仿真,得到如下结果:系统1:G(S) = 10/S(S+1)阶跃响应曲线如图1所示,系统在t=0s时刻开始输入阶跃信号,经过一段时间后达到稳态值。
相轨迹曲线如图2所示,系统在相平面上的运动轨迹呈现出稳定的闭环运动。
系统2:G(S) = 4/S^2 2.828S阶跃响应曲线如图3所示,系统在t=0s时刻开始输入阶跃信号,经过一段时间后达到稳态值。
相轨迹曲线如图4所示,系统在相平面上的运动轨迹呈现出稳定的闭环运动。
2. 非线性环节控制系统的数字仿真(1)系统描述本次实验选取非线性环节控制系统,为Wk(s) = 10/s(s+1),并对其进行饱和死区特性的仿真。
(2)参数设置输入信号:阶跃信号,阶跃时间:0;初值:0;终值:1饱和死区:非线性的上下限为(-2,2),幅值为5和10(3)仿真结果与分析通过Simulink对非线性环节控制系统进行仿真,得到如下结果:阶跃响应曲线如图5所示,系统在t=0s时刻开始输入阶跃信号,经过一段时间后达到稳态值。
相轨迹曲线如图6所示,系统在相平面上的运动轨迹呈现出稳定的闭环运动。
3. 典型环节频率响应的数字仿真(1)系统描述本次实验选取典型环节频率响应,为G(S) = 10/S(S+1),并对其进行频率响应仿真。
计算机仿真技术实验报告1. 引言计算机仿真技术是一种基于计算机模型的虚拟实验手段,通过对真实系统的建模和仿真运行,可以模拟系统在不同条件下的行为和性能,从而实现系统优化、预测和决策支持等目的。
本实验旨在通过一个简单的例子,介绍计算机仿真技术的基本原理和应用。
2. 实验目的掌握计算机仿真技术的基本原理和方法,通过实际操作了解模型建立、参数设置和结果分析等相关内容。
3. 实验过程3.1 模型建立选择一个适合的仿真软件,如Arena、Simulink等,并根据实际需要,在软件中建立相应的仿真模型。
模型的建立包括确定系统的输入、输出、变量和参数,并定义其关系和约束条件。
3.2 参数设置为了保证仿真结果的准确性和可靠性,需要对模型中的参数进行设置。
根据实际情况,选择合适的参数值,并考虑不同参数对仿真结果的影响。
3.3 仿真运行设置好参数后,可以运行仿真程序,观察系统在不同条件下的运行情况。
可以通过改变输入、输出、变量和参数等相关参数,来模拟不同的系统行为。
3.4 结果分析根据仿真运行的结果,进行相应的数据分析和结果评估。
可以通过绘制柱状图、折线图、散点图等,直观地展示系统的性能和行为。
4. 实验结果与讨论根据实际情况,展示实验的结果,并进行相应的讨论。
可以比较不同参数下的仿真结果,分析其差异和影响因素。
在讨论时,可以考虑系统的稳定性、效率、安全性等方面。
5. 实验结论通过本次实验,我们深入了解了计算机仿真技术的基本原理和方法,并通过实际操作,掌握了模型建立、参数设置和结果分析等相关技能。
计算机仿真技术具有广泛的应用领域,包括交通运输、物流管理、生产调度、风险评估等,可以帮助我们理解和优化现实系统的运行和性能。
6. 参考文献[1] Robert, J. (2007). Simulation Modeling and Analysis. Boston: McGraw-Hill.[2] Banks, J., Carson, J., Nelson, B. L., & Nicol, D. M. (2000). Discrete-Event System Simulation. New Jersey: Prentice Hall.7. 致谢感谢实验指导教师对本次实验的支持和指导,也感谢实验中的所有参与人员的付出和帮助。
计算机仿真实验报告《计算机仿真实验报告》摘要:本实验利用计算机仿真技术对某一特定系统进行了模拟实验,通过对系统的运行状态、性能参数等进行观测和分析,得出了一系列有意义的结论。
本报告将详细介绍实验的背景、目的、方法、结果和结论,以及对实验过程中遇到的问题和解决方法进行总结。
1. 背景随着计算机技术的不断发展,计算机仿真技术已经成为了科学研究和工程实践中不可或缺的一部分。
通过对实际系统的建模和仿真,可以更好地理解系统的运行规律,优化系统设计,提高系统的性能和可靠性。
2. 目的本实验旨在利用计算机仿真技术对某一特定系统进行模拟实验,通过观测和分析系统的运行状态和性能参数,得出有意义的结论,为系统的优化设计提供参考。
3. 方法本实验选取了某一特定系统作为研究对象,首先对系统进行了建模,并利用计算机软件进行了仿真实验。
在实验过程中,通过改变系统的参数和条件,观测系统的运行状态和性能参数的变化,并记录实验数据。
4. 结果通过实验观测和数据分析,得出了一系列有意义的结论:系统在不同参数和条件下的运行状态、系统的性能参数随时间的变化趋势等。
这些结论为系统的优化设计提供了重要的参考依据。
5. 结论本实验利用计算机仿真技术对某一特定系统进行了模拟实验,通过观测和分析系统的运行状态和性能参数,得出了一系列有意义的结论。
这些结论为系统的优化设计提供了重要的参考依据,具有一定的理论和实际意义。
6. 实验过程中遇到的问题和解决方法在实验过程中,我们遇到了一些问题,如系统建模的复杂性、仿真实验的参数选择等。
通过认真分析和讨论,我们采取了一些解决方法,最终顺利完成了实验。
综上所述,本实验利用计算机仿真技术对某一特定系统进行了模拟实验,通过观测和分析系统的运行状态和性能参数,得出了一系列有意义的结论,为系统的优化设计提供了重要的参考依据。
同时,我们也总结了实验过程中遇到的问题和解决方法,为今后的研究和实践提供了一定的借鉴。
实验名称:仿真实验——基于MATLAB的电路分析实验目的:1. 熟悉MATLAB软件在电路分析中的应用;2. 学习使用MATLAB进行电路仿真;3. 培养学生运用计算机进行电路分析和设计的能力。
实验时间:2023年X月X日实验地点:计算机实验室实验仪器与软件:1. 电脑一台;2. MATLAB软件;3. 电路仿真模块(如SPICE)。
实验原理:本实验主要利用MATLAB软件中的电路仿真模块进行电路分析。
通过建立电路模型,对电路进行仿真,得到电路的电压、电流等参数,从而验证电路设计的正确性。
实验步骤:1. 打开MATLAB软件,新建一个M文件,命名为“电路仿真实验”;2. 在M文件中编写以下代码,建立电路模型:```% 电路参数R1 = 10; % 电阻1R2 = 20; % 电阻2R3 = 30; % 电阻3V1 = 5; % 源电压V2 = 0; % 源电压2% 建立电路模型s = tf('s');sys = R1R2/(R1R2+R3R3R2/R3+R3R3);```3. 在MATLAB命令窗口中运行上述代码,观察电路模型是否建立成功;4. 使用MATLAB的仿真模块进行仿真,得到电路的电压、电流等参数;5. 将仿真结果与理论计算结果进行对比,验证电路设计的正确性。
实验结果与分析:1. 电路模型建立成功,仿真结果如下:- 电阻R1的电压为1.5V;- 电阻R2的电压为3V;- 电阻R3的电压为5V;- 电路总电流为0.5A。
2. 将仿真结果与理论计算结果进行对比,发现仿真结果与理论计算结果基本一致,验证了电路设计的正确性。
实验结论:通过本次仿真实验,我们掌握了MATLAB软件在电路分析中的应用,学会了使用MATLAB进行电路仿真。
同时,通过仿真结果与理论计算结果的对比,验证了电路设计的正确性。
在今后的电路设计和分析中,我们可以充分利用MATLAB软件,提高工作效率。
实验心得:1. 熟练掌握MATLAB软件的基本操作,能够快速建立电路模型;2. 了解电路仿真模块的基本原理,能够进行电路仿真;3. 学会运用计算机进行电路分析和设计,提高自身能力。
模拟仿真实验报告1. 引言本报告旨在介绍模拟仿真实验的目的、步骤和结果。
通过进行模拟仿真,我们可以在计算机环境中模拟和分析各种实际场景,以便更好地理解和预测真实世界中的现象。
本实验旨在通过逐步思考的方式,详细描述实验过程和结果。
2. 实验目的本次实验的目的是通过模拟仿真,探索某一特定系统或过程的行为,并分析其性能和效果。
通过模拟仿真,我们可以更好地了解系统的特点,优化系统设计,提高系统性能。
3. 实验步骤步骤1:定义实验对象在本实验中,我们选择了一个复杂的物理系统作为实验对象,该物理系统由多个相互作用的元件组成。
我们将使用数学模型和计算机程序来模拟该物理系统。
步骤2:建立数学模型在进行模拟仿真之前,我们需要先建立一个数学模型来描述实验对象的行为。
数学模型的建立通常涉及物理学原理、数学方程和实验数据的分析等。
在本实验中,我们使用了X模型来描述实验对象。
步骤3:编写模拟仿真程序基于所建立的数学模型,我们编写了模拟仿真程序来模拟实验对象的行为。
编写模拟仿真程序需要使用合适的编程语言和仿真工具。
在本实验中,我们使用了Python语言和SimPy库来实现模拟仿真程序。
步骤4:设置实验参数在进行模拟仿真之前,我们需要设置一些实验参数,以便控制模拟仿真的过程。
实验参数可以包括模拟仿真的时间范围、初始条件、系统参数等。
通过调整实验参数,我们可以研究不同情况下系统的行为和性能。
步骤5:运行模拟仿真程序在设置好实验参数后,我们运行编写的模拟仿真程序,开始进行模拟仿真。
在模拟仿真过程中,程序将根据所设定的参数和模型,模拟实验对象的行为,并记录下相关数据。
步骤6:分析实验结果在模拟仿真结束后,我们对得到的实验结果进行分析。
通过分析实验结果,我们可以得到实验对象在不同条件下的行为和性能特点。
这些分析结果可以帮助我们更好地理解实验对象,并为系统优化和改进提供指导。
4. 实验结果经过模拟仿真,我们得到了实验对象在不同条件下的行为和性能结果。
实验名称:数字电路基础实验实验日期:2023年10月25日实验目的:1. 理解数字电路的基本组成和工作原理。
2. 掌握组合逻辑电路和时序逻辑电路的设计方法。
3. 培养实际操作能力和分析问题的能力。
实验原理:数字电路是利用二进制数字信号进行逻辑运算、存储和控制等功能的一种电子电路。
它由逻辑门、触发器、计数器等基本元件组成。
本实验主要涉及组合逻辑电路和时序逻辑电路。
实验仪器与材料:1. 74LS系列集成电路2. 数字逻辑实验箱3. 示波器4. 逻辑分析仪5. 电源6. 导线实验内容:一、组合逻辑电路实验1. 实验一:逻辑门电路(1)使用与非门、或非门、异或门等基本逻辑门,设计并实现以下逻辑函数:- F(A, B) = A + B- G(A, B, C) = AB + C- H(A, B, C) = A'B'C + ABC(2)使用示波器观察输入输出波形,验证逻辑函数的正确性。
2. 实验二:编码器(1)设计并实现一个4-2线优先编码器。
(2)使用示波器观察输入输出波形,验证编码器的正确性。
3. 实验三:译码器(1)设计并实现一个2-4线译码器。
(2)使用示波器观察输入输出波形,验证译码器的正确性。
二、时序逻辑电路实验1. 实验一:触发器(1)设计并实现一个D触发器。
(2)使用示波器观察输入输出波形,验证D触发器的正确性。
2. 实验二:计数器(1)设计并实现一个4位同步计数器。
(2)使用示波器观察输入输出波形,验证计数器的正确性。
3. 实验三:寄存器(1)设计并实现一个8位双向移位寄存器。
(2)使用示波器观察输入输出波形,验证寄存器的正确性。
实验结果与分析:1. 组合逻辑电路实验通过实验,我们掌握了逻辑门电路的基本原理和操作方法,能够根据逻辑函数设计电路,并使用示波器验证电路的正确性。
2. 时序逻辑电路实验通过实验,我们了解了触发器、计数器和寄存器等时序逻辑电路的工作原理,掌握了时序逻辑电路的设计方法,并能够使用示波器观察电路的波形。
实验名称:仿真软件应用实验实验日期:2023年X月X日实验地点:XX大学计算机实验室实验目的:1. 熟悉仿真软件的基本操作和功能。
2. 通过仿真实验,加深对理论知识的应用理解。
3. 培养分析问题、解决问题的能力。
一、实验环境1. 操作系统:Windows 102. 仿真软件:MATLAB R2022a3. 硬件环境:*****************************,16GB RAM二、实验内容本次实验以MATLAB仿真软件为平台,对以下内容进行仿真实验:1. 信号与系统2. 控制系统3. 通信系统三、实验步骤1. 信号与系统(1)建立仿真模型根据信号与系统的理论知识,设计一个简单的信号处理系统。
该系统包括输入信号、滤波器、输出信号等部分。
(2)编写仿真程序使用MATLAB编写程序,实现信号处理系统的仿真。
具体步骤如下:① 定义输入信号③ 信号处理④ 绘制输出信号(3)运行仿真程序运行仿真程序,观察输出信号的变化,分析滤波器的性能。
2. 控制系统(1)建立仿真模型根据控制系统的理论知识,设计一个简单的控制对象。
该对象包括控制器、被控对象、反馈环节等部分。
(2)编写仿真程序使用MATLAB编写程序,实现控制系统的仿真。
具体步骤如下:① 定义被控对象② 设计控制器③ 控制过程④ 绘制控制曲线(3)运行仿真程序运行仿真程序,观察控制曲线的变化,分析控制器的性能。
3. 通信系统(1)建立仿真模型根据通信系统的理论知识,设计一个简单的通信系统。
该系统包括信源、信道、信宿等部分。
(2)编写仿真程序使用MATLAB编写程序,实现通信系统的仿真。
具体步骤如下:① 定义信源③ 信号传输④ 信号接收⑤ 信号解调(3)运行仿真程序运行仿真程序,观察信号传输、接收和解调的过程,分析通信系统的性能。
四、实验结果与分析1. 信号与系统仿真结果显示,滤波器能够有效地对输入信号进行处理,输出信号满足设计要求。
滤波器的性能指标如下:- 通带波动:0.5dB- 阻带衰减:40dB- 截止频率:1kHz2. 控制系统仿真结果显示,控制器能够稳定地控制被控对象,控制曲线满足设计要求。
一、引言随着科技的不断发展,仿真实验在教育教学、科研实践等领域得到了广泛应用。
本次实训旨在通过仿真实验,提高我们的实践能力、创新能力和团队协作能力。
以下是我对本次仿真实验实训的总结报告。
一、实训背景本次实训是在我国某高校电子信息工程专业的课程设置中进行的,旨在使学生了解仿真实验的基本原理、方法和步骤,提高学生的动手能力和创新能力。
实训过程中,我们主要使用了仿真软件Multisim进行电子电路仿真实验。
二、实训目标1. 掌握仿真软件Multisim的基本操作和功能;2. 熟悉电子电路仿真实验的基本步骤和流程;3. 通过仿真实验,提高自己的实践能力和创新能力;4. 培养团队协作精神,提高沟通与协作能力。
三、实训内容1. Multisim软件介绍及基本操作在实训过程中,我们首先学习了Multisim软件的基本操作和功能。
通过学习,我们掌握了以下内容:(1)软件界面及工具栏的使用;(2)电路元件的添加、编辑和删除;(3)电路仿真参数的设置;(4)仿真结果的查看和分析。
2. 电子电路仿真实验本次实训共进行了5个电子电路仿真实验,分别为:(1)放大电路仿真实验;(2)滤波电路仿真实验;(3)振荡电路仿真实验;(4)运算放大器电路仿真实验;(5)数字电路仿真实验。
在实验过程中,我们按照以下步骤进行:(1)根据实验要求,设计电路图;(2)添加电路元件,设置仿真参数;(3)运行仿真实验,观察仿真结果;(4)分析仿真结果,总结实验结论。
3. 团队协作与沟通在实训过程中,我们以小组为单位进行实验,每个小组由4名成员组成。
在实验过程中,我们充分发挥团队协作精神,共同解决问题,确保实验顺利进行。
同时,我们还加强了与指导老师的沟通,及时反馈实验过程中遇到的问题。
四、实训成果1. 理论知识方面:通过本次实训,我们对电子电路仿真实验的基本原理、方法和步骤有了更加深入的了解,为今后的学习和研究打下了坚实基础。
2. 实践能力方面:通过实际操作,我们提高了自己的动手能力,学会了如何运用仿真软件进行电子电路设计、分析和优化。
仿真实验报告范文《仿真实验报告》摘要:本次实验主要通过使用仿真软件(如MATLAB、PSpice等),对特定的系统进行建模与仿真,以验证其是否符合我们的设计要求。
本文将从实验的背景、实验目的、实验原理与方法、仿真结果与分析以及结论等方面,对本次实验进行详细的说明和总结。
一、实验背景随着科学技术的飞速发展,虚拟现实(VR)技术已经成为当前热门话题。
虚拟现实技术可以通过模拟环境创造出与现实世界相似的感觉和体验,广泛应用于游戏、教育、医疗等领域。
为了实现更好的虚拟现实的效果,我们需要对特定系统进行建模与仿真,以验证是否符合设计要求。
二、实验目的本次实验的主要目的是通过仿真软件对特定系统进行建模与仿真,验证其在虚拟现实场景下的表现。
通过对仿真结果的分析,我们可以了解系统工作的稳定性、性能指标等,并做出有针对性的优化措施。
三、实验原理与方法1.建立系统模型根据实验设定的需求,我们需要建立特定系统的数学模型。
根据系统的输入输出关系,可以选择合适的数学模型,如线性模型、非线性模型等。
同时,我们需要合理地选择系统的参数,以保证仿真过程的准确性。
2.仿真软件选取根据实验要求,选择合适的仿真软件进行仿真。
常见的仿真软件有MATLAB、PSpice等,根据实际需要选择最适合的仿真软件。
3.参数设置在仿真软件中,我们需要设置系统的输入信号、初始条件等参数。
通过合理的参数设置,可以得到更准确的仿真结果。
4.运行仿真在仿真软件中运行仿真模型,得到仿真结果。
同时,仿真软件还可以提供一些分析工具,如频谱分析、时域分析等,对仿真结果进行进一步分析。
四、仿真结果与分析根据实验设定,我们得到了系统的仿真结果。
通过对仿真结果进行分析,我们可以得到系统的稳态响应、动态响应以及稳定性等性能指标。
同时,我们还可以通过对仿真结果进行优化,得到更好的系统性能。
五、结论通过本次实验,我们成功地建立了特定系统的仿真模型,并通过仿真软件进行了仿真分析。
武汉工程大学matlab实验三离散时间系统的时域分析武汉工程大学数字信号处理实验报告三专业班级:14级通信03班学生姓名:秦重双学号:1404201114 实验时间:2017年5月10日实验地点:4B315 指导老师:杨述斌实验二: 离散时间系统的时域分析一、实验目的1.在时域中仿真离散时间系统,进而理解离散时间系统对输入信号或延迟信号进行简单运算处理,生成具有所需特性的输出信号的方法。
2.仿真并理解线性与非线性、时变与时不变等离散时间系统。
3.掌握线性时不变系统的冲激响应的计算,并用计算机仿真实现。
4.仿真并理解线性时不变系统的级联、验证线性时不变系统的稳定特性。
二、实验设备计算机,MATLAB语言环境。
三、实验基础理论1.系统的线性性质线性性质表现为系统满足线性叠加原理:若某一输入是由N个信号的加权和组成的,则输出就是系统对这N个信号中每一个的响应的相应加权和组成的。
设x1(n)和x2(n)分别作为系统的输入序列,其输出分别用y1(n)和y2(n)表示,即y1(n)?T[x1(n)],y2(n)?T[x2(n)]若满足T[a1x1(n)?a2x2(n)]?a1y1(n)?a2y2(n)则该系统服从线性叠加原理,或者称该系统为线性系统。
2.系统的时不变特性若系统的变换关系不随时间变化而变化,或者说系统的输出随输入的移位而相应移位但形状不变,则称该系统为时不变系统(或称为移不变系统)。
对时不变系统,若y(n)?T[x(n)],则T[x(n?m)]?y(n?m)3.系统的因果性系统的因果性即系统的可实现性。
如果系统时刻的输出取决于时刻及时刻以前的输入,而和时刻以后的输入无关,则该系统是可实现的,是因果系统。
系统具有因果性的充分必要条件为h(n)?0,n?04.系统的稳定性稳定系统是指有界输入产生有界输出(BIBO)的系统。
如果对于输入序列,存在一个不变的正有限值,对于所有值满足|x(n)|?M??则称该输入序列是有界的。
计算机网络与通信文档(DOC)武汉工程大学药物仿真实验进入21世纪,人类进入了网络信息化时代,从日常生活、学习到迷信研讨再到人们的行为和思想无不打下了信息时代的烙印。
借助无处不在的无线和有线网络,人们之间的沟通变得更方便、更快捷。
人们可以在网上交友、冲浪、旅游、购物、休闲文娱,可以享用即时通讯,接受远程教育,发行电子刊物,而电子银行、电子商务、网上图书馆的便利更是显而易见。
同时还有网络警察、网络部队时辰为人们维护网络次第,提供平安保证。
理想生活中存在的东西简直都能在网络上找到,因此越来越多的人们参与到网络运用的行列中。
依据著名的梅特卡尔菲定律〔Metcalfe’s Law〕,网络的价值将随着用户数的添加而按指数规律增长。
既然网络如此重要,与人们的生活又联络得如此严密,那么我们就有必要掌握好网络技术,并充沛应用它武装自我,迎接应战,为自己在当今网络信息社会中的立足和开展做好预备。
众所周知,从日常通讯运用的IP 、移动通讯设备、聊天工具QQ,到网络通讯新技术10G以太网、下一代网络〔NGN〕等都包括着信息技术的结晶,那么,该如何掌握网络开展意向,掌握并应用好目前盛行的网络技术呢?本章内容就将围绕这些效果展开。
本章重点•计算机网络的基本概念•完成〝三网合一〞的基础•无线网络•下一代Internet技术〔NGN〕的基本概念•计算机网络工程架构1.1 计算机网络技术概述计算机网络是计算机技术和通讯技术结合的产物,这种结合对计算机系统的组织方式发生了深远的影响。
为了完成数据交流和资源共享,就得将计算机互连起来,这样原来〝计算机中心〞的方式,即由一台计算机来处置整个组织中一切计算需求的模型,就被新的计算机互连模型取代。
这种互连模型就是计算机网络,它由资源子网和通讯子网组成。
人们通常所熟习的万维网不同于计算机网络,它是运转在Internet上的散布式系统。
在一个散布式系统〔distributed system〕中,一组独立的计算机展现给用户的是一个一致的全体。
武汉⼯程⼤学实验报告-数字仿真实验名称:Matlab 的基本操作与编程⼀、实验⽬的:1)熟悉MATLAB 软件的运⾏环境和基本操作2)掌握MATLAB 矩阵的输⼊⽅式、元素的提取与组合 3)掌握数值运算。
4)掌握MATLAB 软件的绘图功能 5)掌握M 函数的编写。
⼆、实验内容:1)启动MATLAB 软件,观察其界⾯组成及操作⽅法,了解各部分的功能 2)使⽤基本的MATLAB 命令,并观察记录执⾏结果帮助、查询信息类命令:Demo 、help 、who 、whos 显⽰、记录格式等命令:clc 、clear 、format 尝试⼀下其他的命令(dos 命令)3)⽣成⼀个5阶魔⽅矩阵,并提取其第(3、4、5)⾏,第(2、3、4)列构成的新的矩阵5)⽤命令⾏⽅式求解下式的值42cos lim22x x e x -→(提⽰使⽤syms x 定义⼀个符号,使⽤limit 函数)6)MATLAB 的绘图(1)⼆维绘图命令plot :画出,sin x y =在]2,0[π∈x 上的图形(2)三维绘图命令plot3:画出三维螺旋线===t z t y t x cos sin ,]4,0[π∈t 的图形.mesh 命令:绘制)2(22y x e z +-=,在]5,5[-∈x ,]5,5[-∈y 区间的曲⾯7)编写M 函数利⽤程序流程控制语句编写⼀个函数myfactorial (n ),实现n !(阶乘)。
要求使⽤help 命令可以列出相关的帮助信息。
三、实验结果及分析2、Demohelp3、(1)实验程序:a=magic(5)运⾏结果:a =17 24 1 8 15 23 5 7 14 164 6 13 20 2210 12 19 21 311 18 25 2 9(2)实验程序:a(3:5,2:4)运⾏结果:ans =6 13 2012 19 2118 25 25、实验程序:syms x;limit((cos(x)-exp(x*x/2)/2)/4)运⾏结果:ans =1/86、(1)实验程序:x = 0 : pi/20 : 2*pi;y = sin(x);plot(x, y);实验结果:(2)实验程序:x = 0 : pi/20 : 2*pi;y = sin(x);plot(x, y);x=sin(t);x=sin(t); y=cos(t);t=0:pi/20:2*pi;plot3(x,y,t);实验结果:实验程序:x=-5:0.5:5;y=x;[X,Y]=meshgrid(x,y);R=(X.^2+Y.^2)/((-1)*4); Z=exp(R);surf(X,Y,Z)实验结果:7、实验程序:function[x]=myfactorial(n) x=1;for a=1:n;x=x*a;end运⾏举例:>> myfactorial(2)ans =2实验名称:典型闭环系统的数字仿真及计算机解题⼀、实验⽬的:1)熟悉典型闭环的仿真过程2)掌握MATLAB编程实现典型闭环环节仿真3)利⽤典型闭环环节仿真程序解题。
实验名称:Matlab 的基本操作与编程一、实验目的:1)熟悉MATLAB 软件的运行环境和基本操作2)掌握MATLAB 矩阵的输入方式、元素的提取与组合 3)掌握数值运算。
4)掌握MATLAB 软件的绘图功能 5)掌握M 函数的编写。
二、实验内容:1)启动MATLAB 软件,观察其界面组成及操作方法,了解各部分的功能 2)使用基本的MATLAB 命令,并观察记录执行结果帮助、查询信息类命令:Demo 、help 、who 、whos 显示、记录格式等命令:clc 、clear 、format 尝试一下其他的命令(dos 命令)3)生成一个5阶魔方矩阵,并提取其第(3、4、5)行,第(2、3、4)列构成的新的矩阵5)用命令行方式求解下式的值42cos lim22x x e x -→(提示使用syms x 定义一个符号,使用limit 函数)6)MATLAB 的绘图(1) 二维绘图命令plot :画出,sin x y =在]2,0[π∈x 上的图形(2) 三维绘图命令plot3: 画出三维螺旋线⎪⎩⎪⎨⎧===t z t y t x cos sin ,]4,0[π∈t 的图形.mesh 命令:绘制)2(22y x e z +-=,在]5,5[-∈x ,]5,5[-∈y 区间的曲面7)编写M 函数利用程序流程控制语句编写一个函数myfactorial (n ),实现n !(阶乘)。
要求使用help 命令可以列出相关的帮助信息。
三、实验结果及分析2、Demohelp3、(1)实验程序:a=magic(5)运行结果:a =17 24 1 8 15 23 5 7 14 164 6 13 20 2210 12 19 21 311 18 25 2 9(2)实验程序:a(3:5,2:4)运行结果:ans =6 13 2012 19 2118 25 25、实验程序:syms x;limit((cos(x)-exp(x*x/2)/2)/4)运行结果:ans =1/86、(1)实验程序:x = 0 : pi/20 : 2*pi;y = sin(x);plot(x, y);实验结果:(2)实验程序:x = 0 : pi/20 : 2*pi;y = sin(x);plot(x, y);x=sin(t);x=sin(t); y=cos(t);t=0:pi/20:2*pi;plot3(x,y,t);实验结果:实验程序:x=-5:0.5:5;y=x;[X,Y]=meshgrid(x,y);R=(X.^2+Y.^2)/((-1)*4);Z=exp(R);surf(X,Y,Z)实验结果:7、实验程序:function[x]=myfactorial(n)x=1;for a=1:n;x=x*a;end运行举例:>> myfactorial(2)ans =2实验名称:典型闭环系统的数字仿真及计算机解题一、实验目的:1)熟悉典型闭环的仿真过程2)掌握MATLAB编程实现典型闭环环节仿真3)利用典型闭环环节仿真程序解题。
4)掌握MATLAB下对控制系统进行时域、频域和根轨迹的分析二、实验内容:1)编写典型环节阶跃响应函数典型环节冲击响应函数function [yout,t] = my_step(num,den,v,t0,tf,h,R,n)输入参数:num:传递函数的分子系数向量den:传递函数的分母系数向量v:反馈比例系数t0:仿真起始时间tf:仿真终止时间h:仿真步长R:阶跃幅值n:系统阶次输出参数:yout:响应输出t:时间向量2)用上述函数分析以下系统,同时用simulink分析该系统,并比较其结果。
3)被控对象的传递函数为)20030(400)(2++=S S S s G ,用simulin 建模并分析其单位阶跃响应。
用MATLAB 命令绘出其伯德图和根轨迹图。
三、实验结果及分析 2)结果:3)仿真结果:Bodenum=[0,0,0,400];>> den=[1,30,200,0];>> bode(num,den)>>根轨迹>> num=[0,0,0,400]; >> den=[1,30,200,0]; >> rlocus(num,den)实验名称:双闭环控制直流电动机调速系统建模与仿真分析一、实验目的:1.熟悉Matlab/Simulink仿真环境;2.掌握Simulink图形化建模方法;3.验证“直流电动机转速/电流双闭环PID控制方案”的有效性。
二、实验内容:(详见后面的实验指导)1.“双闭环直流电动机调速系统”的建模2.电流环/调节器设计3.电流环动态跟随性能仿真实验4.转速环/调节器设计5.转速环动态抗扰性能仿真实验6.系统动态性能分析(给出仿真实验结果与理论分析结果的对比/分析/结论)三、实验结果及分1、“双闭环直流电动机调速系统”的建模仿真波形2、电流环模型及其环动态跟随性能仿真实验伯德图[num,den]=linmod('current_loop')sys=tf(num,den)margin(sys)[mag,phase,w]=bode(sys);奈奎斯特图[num,den]=linmod('current_loop')sys=tf(num,den)margin(sys)[gm,pm,wcg,wcp]=margin(mag,phase,w) Nyquist(sys)阶跃响应曲线[num,den]=linmod('current_loop')sys=tf(num,den)margin(sys)Step(sys)运行程序得到相关参数:Transfer function:-1.164e-010 s^3 + 2.038e007 s^2 + 4.977e009 s + 2.136e011 -----------------------------------------------------------------------s^5 + 1043 s^4 + 3.253e005 s^3 + 4.531e007 s^2 + 3.22e009 s + 8.544e010gm =4.3078pm =48.4499wcg =345.6682wcp =163.79233、转速环建模及其抗干扰性能仿真模型仿真波形参考文献:[1] 张晓华主编《控制系统数字仿真与CAD》第2版机械工业出版社2005[2] 陈伯时主编《电力拖动自动控制系统》第2版机械工业出版社2001附件:“双闭环控制直流电动机调速系统”数字仿真实验实验指导四、实验目的4.熟悉Matlab/Simulink仿真环境;5.掌握Simulink图形化建模方法;6.验证“直流电动机转速/电流双闭环PID控制方案”的有效性。
五、实验内容7.“双闭环直流电动机调速系统”的建模8.电流环/调节器设计9.电流环动态跟随性能仿真实验10.转速环/调节器设计11.转速环动态抗扰性能仿真实验12.系统动态性能分析(给出仿真实验结果与理论分析结果的对比/分析/结论)六、实验步骤1、系统建模A.控制对象的建模建立线性系统动态数学模型的基本步骤如下:(1)根据系统中各环节的物理定律,列写描述据该环节动态过程的微分方程;(2)求出各环节的传递函数;(3)组成系统的动态结构图并求出系统的传递函数。
下面分别建立双闭环调速系统各环节的微分方程和传递函数。
B.额定励磁下的直流电动机的动态数学模型图1给出了额定励磁下他励直流电机的等效电路,其中电枢回路电阻R和电感L包含整流装置内阻和平波电抗器电阻与电感在内,规定的正方向如图所示。
1图1 直流电动机等效电路由图1可列出微分方程如下:0dd d dI U RI LE dt=++ (主电路,假定电流连续) e E C n = (额定励磁下的感应电动势)2375e L GD dnT T dt-=⋅ (牛顿动力学定律,忽略粘性摩擦)e m d T C I = (额定励磁下的电磁转矩)定义下列时间常数:l LT R =——电枢回路电磁时间常数,单位为s ;2375m e mGD R T C C =——电力拖动系统机电时间常数,单位为s ; 代入微分方程,并整理后得:0()dd d ldI U E R I T dt -=+ m d d L T dE I I R dt-=⋅ 式中,/dL L m I T C =——负载电流。
在零初始条件下,取等式两侧得拉氏变换,得电压与电流间的传递函数0()1/()()1d d l I s R U s E s T s =-+(1)电流与电动势间的传递函数为()()()d dL m E s RI s I s T s=- (2)d Ua) b)Uc)图2 额定励磁下直流电动机的动态结构图2a) 式(1)的结构图 b)式(2)的结构图c)整个直流电动机的动态结构图C .晶闸管触发和整流装置的动态数学模型在分析系统时我们往往把它们当作一个环节来看待。
这一环节的输入量是触发电路的控制电压U ct ,输出量是理想空载整流电压U d0。
把它们之间的放大系数K s 看成常数,晶闸管触发与整流装置可以看成是一个具有纯滞后的放大环节,其滞后作用是由晶闸管装置的失控时间引起的。
下面列出不同整流电路的平均失控时间:表1 各种整流电路的平均失控时间(f=50Hz )用单位阶跃函数来表示滞后,则晶闸管触发和整流装置的输入输出关系为01()d s ct s U K U t T =⋅-按拉氏变换的位移定理,则传递函数为0()()s T s d s ct U s K e U s -= (3) 由于式(3)中含有指数函数s T s e -,它使系统成为非最小相位系统,分析和设计都比较麻烦。
为了简化,先将s T s e -按台劳级数展开,则式(3)变成02233()()12!3!s s T s d s ss T s ct s s s U s K K K e U s e T s T s T s -===++++ 考虑到T s 很小,忽略其高次项,则晶闸管触发和整流装置的传递函数可近似成一阶惯性环节0()()1d sct s U s K U s T s ≈+ (4)其结构图如图3所示。
3a)b)图3 晶闸管触发和整流装置的动态结构图 a) 准确的结构图 b)近似的结构图D .比例放大器、测速发电机和电流互感器的动态数学模型比例放大器、测速发电机和电流互感器的响应都可以认为是瞬时的,因此它们的放大系数也就是它们的传递函数,即()()ct p n U s K U s =∆ (5) ()()n U s n s α= (6) ()()i d U s I s β= (7)E .双闭环控制直流电动机调速系统的动态数学模型 根据以上分析,可得双闭环控制系统的动态结构图如下图4 双闭环控制系统的动态结构图2、实验系统参数系统中采用三相桥式晶闸管整流装置,基本参数如下:直流电动机:220V ,13.6A ,1480r/min ,e C =0.131V/(r/min ), 允许过载倍数λ=1.5。