中国石油大学(北京)自动控制原理胡寿松 课件PPT
- 格式:doc
- 大小:3.20 MB
- 文档页数:5

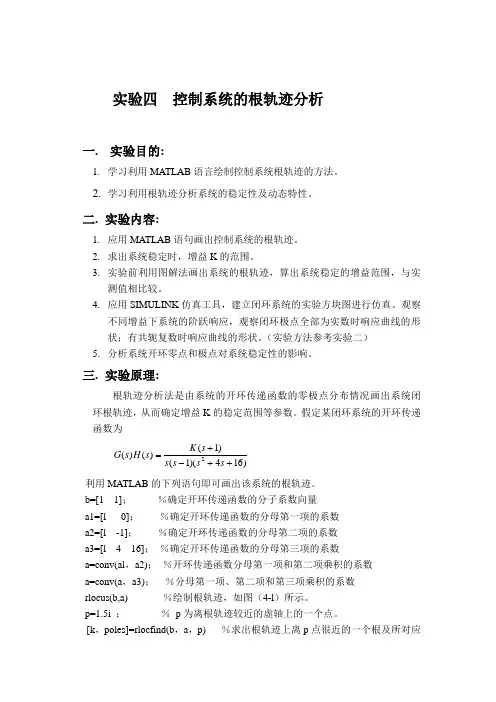
实验四 控制系统的根轨迹分析一. 实验目的:1. 学习利用MATLAB 语言绘制控制系统根轨迹的方法。
2. 学习利用根轨迹分析系统的稳定性及动态特性。
二. 实验内容:1. 应用MATLAB 语句画出控制系统的根轨迹。
2. 求出系统稳定时,增益K 的范围。
3. 实验前利用图解法画出系统的根轨迹,算出系统稳定的增益范围,与实测值相比较。
4. 应用SIMULINK 仿真工具,建立闭环系统的实验方块图进行仿真。
观察不同增益下系统的阶跃响应,观察闭环极点全部为实数时响应曲线的形状;有共轭复数时响应曲线的形状。
(实验方法参考实验二)5. 分析系统开环零点和极点对系统稳定性的影响。
三. 实验原理:根轨迹分析法是由系统的开环传递函数的零极点分布情况画出系统闭环根轨迹,从而确定增益K 的稳定范围等参数。
假定某闭环系统的开环传递函数为)164)(1()1()()(2++-+=s s s s s K s H s G利用MATLAB 的下列语句即可画出该系统的根轨迹。
b=[1 1]; %确定开环传递函数的分子系数向量a1=[l 0]; %确定开环传递函数的分母第一项的系数a2=[l -1]; %确定开环传递函数的分母第二项的系数a3=[l 4 16]; %确定开环传递函数的分母第三项的系数a=conv(al ,a2); %开环传递函数分母第一项和第二项乘积的系数 a=conv(a ,a3); %分母第一项、第二项和第三项乘积的系数 rlocus(b,a) %绘制根轨迹,如图(4-l )所示。
p=1.5i ; % p 为离根轨迹较近的虚轴上的一个点。
[k ,poles]=rlocfind(b ,a ,p) %求出根轨迹上离p 点很近的一个根及所对应的增益K 和其它三个根。
K=22.5031, poles= -1.5229+2.7454i -1.5229-2.7454i0.0229+1.5108i 0.0229-1.5108i再令p=1.5108i ,可得到下面结果:k=22.6464, poles=-1.5189+2.7382i -1.5189-2.7382i0.0189+1.5197i 0.0189-1.5197i再以此根的虚部为新的根,重复上述步骤,几步后可得到下面的结果: k=23.316, poles=-1.5000+2.7040i -1.5000-2.7040i0.0000+1.5616i 0.0000-1.5616i这就是根轨迹由右半平面穿过虚轴时的增益及四个根。





实验四 控制系统的根轨迹分析
一. 实验目的:
1. 学习利用MATLAB 语言绘制控制系统根轨迹的方法。
2. 学习利用根轨迹分析系统的稳定性及动态特性。
二. 实验内容:
1. 应用MATLAB 语句画出控制系统的根轨迹。
2. 求出系统稳定时,增益K 的范围。
3. 实验前利用图解法画出系统的根轨迹,算出系统稳定的增益范围,与实测值相比较。
4. 应用SIMULINK 仿真工具,建立闭环系统的实验方块图进行仿真。
观察不同增益下系统的阶跃响应,观察闭环极点全部为实数时响应曲线的形状;有共轭复数时响应曲线的形状。
(实验方法参考实验二)
5. 分析系统开环零点和极点对系统稳定性的影响。
三. 实验原理:
根轨迹分析法是由系统的开环传递函数的零极点分布情况画出系统闭环根轨迹,从而确定增益K 的稳定范围等参数。
假定某闭环系统的开环传递函数为
)164)(1()
1()()(2++-+=s s s s s K s H s G
利用MATLAB 的下列语句即可画出该系统的根轨迹。
b=[1 1]; %确定开环传递函数的分子系数向量
a1=[l 0]; %确定开环传递函数的分母第一项的系数
a2=[l -1]; %确定开环传递函数的分母第二项的系数
a3=[l 4 16]; %确定开环传递函数的分母第三项的系数
a=conv(al ,a2); %开环传递函数分母第一项和第二项乘积的系数 a=conv(a ,a3); %分母第一项、第二项和第三项乘积的系数 rlocus(b,a) %绘制根轨迹,如图(4-l )所示。
p=1.5i ; % p 为离根轨迹较近的虚轴上的一个点。
[k ,poles]=rlocfind(b ,a ,p) %求出根轨迹上离p 点很近的一个根及所对应
的增益K 和其它三个根。
K=22.5031, poles= -1.5229+2.7454i -1.5229-2.7454i
0.0229+1.5108i 0.0229-1.5108i
再令p=1.5108i ,可得到下面结果:
k=22.6464, poles=-1.5189+2.7382i -1.5189-2.7382i
0.0189+1.5197i 0.0189-1.5197i
再以此根的虚部为新的根,重复上述步骤,几步后可得到下面的结果: k=23.316, poles=-1.5000+2.7040i -1.5000-2.7040i
0.0000+1.5616i 0.0000-1.5616i
这就是根轨迹由右半平面穿过虚轴时的增益及四个根。
这时增益的临界值为23.3160,用同样的方法可得到根轨迹由左半平面穿过虚轴时的增益和四个根如下:
k=35.6853 poles= 0.0000+2.5616i 0.0000-2.5616i
-1.5000+1.7856i 1.5000-1.7856
增益的另一个临界值为35.6853 , 由此可得增益的稳定范围为:
23.3160<K<35.6853
四. 实验步骤:
1. 进入WINDOWS 操作系统;
2. 进入MATLAB COMMAND WINDOW(双击桌面图标进入);
3. 根据实验中提供的方法,将上述MATLAB 语句写入命令行执行,或编
写成一个file.m 文件,在MATLAB 命令行提示符>>处键入文件名,执行(按Enter 键),即可画出根轨迹图;
4. 根据实验原理中提供的开环传递函数,用SIMULINK 仿真工具,构成
实验方块图。
观察不同增益下系统的阶跃响应(观察闭环极点全部为实数时响应曲线的形状;有共轭复数时响应曲线的形状),记录不同增益下的阶跃响应曲线。
5. 增加适当的开环零点(开环极点)观察根轨迹的变化。
6. 将系统的开环传递函数改为:
)54()()(2++=s s s K
s H s G 重复上述步骤,绘出该系统的根轨迹图。
观察闭环极点为实根时响应曲线的形状,有共轭复根时响应曲线的形状。
改变开环极点的位置,观察根轨迹图的变化,参见图(4-2)。
7. 再将系统的开环传递函数改为:
)()
1()()(2a s s s K s H s G ++=
将a 取不同值,改变极点位置,分别确定使根轨迹具有一个、两个和没有实数分离点的 a 值范围,确定极点a 值的稳定范围,并绘出根轨迹图,参见图(4-3)。
提示:该系统分离点方程的解为:
d 1,2=[ -(3+a)±√(a-9)(a-1)]/4
a=9时,根轨迹有一个分离点,
a>9时,根轨迹有两个分离点,
0<a<9时,根轨迹没有分离点。
a 的稳定范围是a>1。
五. 思考题:
1. 控制系统的质量指标在根平面上该怎样表示?
2. 利用图解法绘制根轨迹的8个规则是什么?
3. 闭环极点为实根时响应曲线的形状如何?有共轭复根时响应曲线的形状
如何?
4. 增加系统的开环零点(开环极点)对系统的性能有何影响?
系统的根轨迹图如下所示:
图(4-l )
在步骤6中,改变开环极点的位置根轨迹图的变化:
图(4-2)
步骤7中,根轨迹具有一个、两个和没有实数分离点时,根轨迹图的变化及系统不稳定时的根轨迹图。
图(4-3)。