HawkScan低空激光扫描测图系统(V3)
- 格式:pdf
- 大小:5.74 MB
- 文档页数:26
浅析三维激光扫描技术在地形图测绘中的应用张俊发布时间:2023-05-22T10:03:36.877Z 来源:《工程管理前沿》2023年4期作者:张俊[导读] 三维激光扫描技术是一种先进、全自动、高精度的立体扫描技术,是一种获取地理空间数据的新兴技术方法四川金色山川土地规划设计有限公司四川成都 610000摘要:三维激光扫描技术是一种先进、全自动、高精度的立体扫描技术,是一种获取地理空间数据的新兴技术方法。
本文从三维激光扫描技术的特点入手,详细分析了三维激光扫描测绘地形图的流程,并与传统测图技术的优缺点进行了对比。
关键词:三维激光扫描;地形图;点云数据;外业数据采集1 引言地形测绘就是测定地球物体表面的地形地貌及其在水平面上的投影位置和高程,并通过按照比例缩小,利用特定的符号及注记将这些特征描绘到纸上的工作。
地形测绘包括两个部分,即测量和绘图,两个工作几乎是在同一时间进行。
传统的大比例尺地形测绘一般是应用GNSS、全站仪等技术进行。
这些技术方法都需要在被测对象特征点上树立观测目标(流动站或梭镜等),均是根据对地形特征点的三维维坐标测量,进行内业综合绘图,形成线划地形图。
随着科技的不断进步,自动化成为地形测绘技术的发展方向,传统的信息数据采集方法已不能满足空间信息化的需要。
三维激光扫描技术可将实体信息迅速扫描为点云数据,使其变换为电脑可识别处理的信息,且这种信息更加丰富翔实,便于存档。
2 三维激光扫描测绘地形图流程2.1 准备工作为能使项目的技术设计能够顺利实施,需要全面细致地了解项目的现场坏境,在踏勘中,需了解并查看现有控制点的信息,包括位置、保存情况及使用的可能性,并根据扫描对象在空间位置的分布、形态特征及扫描的精度、分辨率等特点来设计扫描路线、站点的位置等。
根据项目现场的踏勘情况,选择合适的三维激光打描仪。
2.2 控制测量为了满足地形测绘和施工需要,在测区周边沿简易道路布设控制点,控制点间距1500m左右为宜。
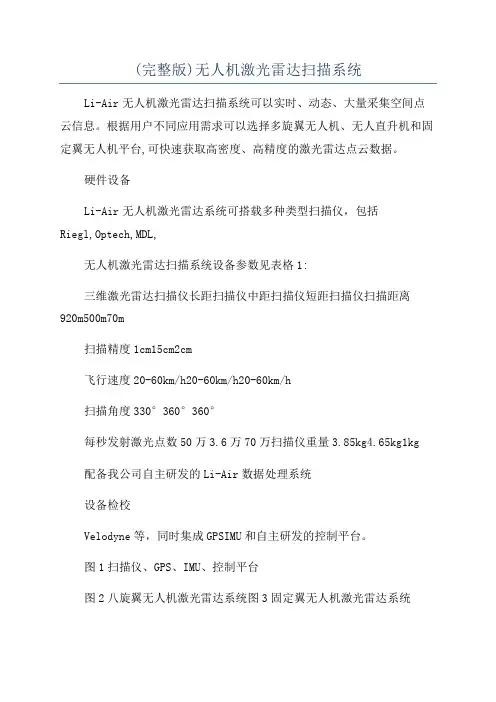
(完整版)无人机激光雷达扫描系统Li-Air无人机激光雷达扫描系统可以实时、动态、大量采集空间点云信息。
根据用户不同应用需求可以选择多旋翼无人机、无人直升机和固定翼无人机平台,可快速获取高密度、高精度的激光雷达点云数据。
硬件设备Li-Air无人机激光雷达系统可搭载多种类型扫描仪,包括Riegl,Optech,MDL,无人机激光雷达扫描系统设备参数见表格1:三维激光雷达扫描仪长距扫描仪中距扫描仪短距扫描仪扫描距离920m500m70m扫描精度1cm15cm2cm飞行速度20-60km/h20-60km/h20-60km/h扫描角度330°360°360°每秒发射激光点数50万3.6万70万扫描仪重量3.85kg4.65kg1kg配备我公司自主研发的Li-Air数据处理系统设备检校Velodyne等,同时集成GPSIMU和自主研发的控制平台。
图1扫描仪、GPS、IMU、控制平台图2八旋翼无人机激光雷达系统图3固定翼无人机激光雷达系统公司提供完善的设备检较系统,在设备使用过程中,定期对系统的各个组件进行重新标定,以保证所采集数据的精度。
图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右)图4(左)为检校前扫描线:不连续且有异常抖动;图4(中)为检校后扫描线:数据连续且平滑变化;图4(右)为检校前后叠加图,红线标记的部分检校效果对比明显图5(左)为检校前扫描线:不在同一平面;图4(中)为检校后扫描线:在同一平面;图4(右)为检校前后叠加图。
成熟的飞控团队公司拥有成熟的软硬件团队以及经验丰富的飞控手,保证数据质量以及设备的安全性,大大节约了外业成本和时间图6无人机激光雷达系统以及影像系统完善的数据预处理软件公司自主研发的无人机系统配备有成套的激光雷达数据预处理软件Li-Air,该软件可对无人机实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。
图7Li-Air数据预处理功能成功案例2022年7月,本公司利用Li-Air无人机激光雷达扫描系统进行中关村软件园园区扫描项目,采集园区高清点云以及影像数据。
三维激光扫描仪矿山测量解决方案在矿山测量领域,三维激光扫描仪被广泛应用于地质勘探、矿石开采、矿山安全监测等方面。
三维激光扫描仪能够高速、高精度地获取矿山环境的三维点云数据,为地质勘探和矿石开采提供有力支持。
本文将介绍三维激光扫描仪在矿山测量中的解决方案。
首先,三维激光扫描仪在矿山测量中能够快速获取大范围的地质表面数据。
传统的测量方法需要人工测量,费时费力,并且容易出现误差。
而激光扫描仪通过发射激光束并接收反射回来的光,可以在短时间内获取大范围的点云数据。
这些数据可以被用来生成高精度的地形模型和地质剖面图,为勘探和开采提供可靠的依据。
其次,三维激光扫描仪可以精确测量矿山内部的空间结构。
在矿山开采过程中,了解矿石体的几何形态和结构分布是非常重要的。
传统的测量方法往往只能获取局部点云数据,难以全面了解矿山内部的情况。
而激光扫描仪可以通过多个角度和位置进行扫描,获取全方位的点云数据,从而准确了解矿山内部的空间结构。
此外,三维激光扫描仪还可以用于矿山安全监测。
矿山开采过程中,往往会出现地质灾害风险,如岩层塌方、地表塌陷等。
传统的地质灾害监测方法往往需要人工巡视,不仅费时费力,而且存在安全风险。
而激光扫描仪可以通过远程无人值守的方式,实时监测矿山内部的地质灾害风险。
一旦发现异常情况,可以及时采取措施,保障矿工的安全。
最后,三维激光扫描仪在矿山测量中还可以应用于矿山环境的变化监测。
矿山开采过程中,地质环境会发生变化,如岩层移动、地表塌陷等。
传统的测量方法往往需要频繁地对矿山环境进行测量,费时费力,并且无法全面获取信息。
而激光扫描仪可以周期性地对矿山进行扫描,获取点云数据,并通过比对数据的变化趋势,分析矿山环境的变化情况,为矿山管理者提供决策支持。
总之,三维激光扫描仪在矿山测量中具有快速、高精度、无人值守等优势。
它可以帮助地质勘探人员准确了解地质环境,为矿石开采提供可靠依据;可以帮助矿山管理者监测矿山的安全风险和环境变化情况。
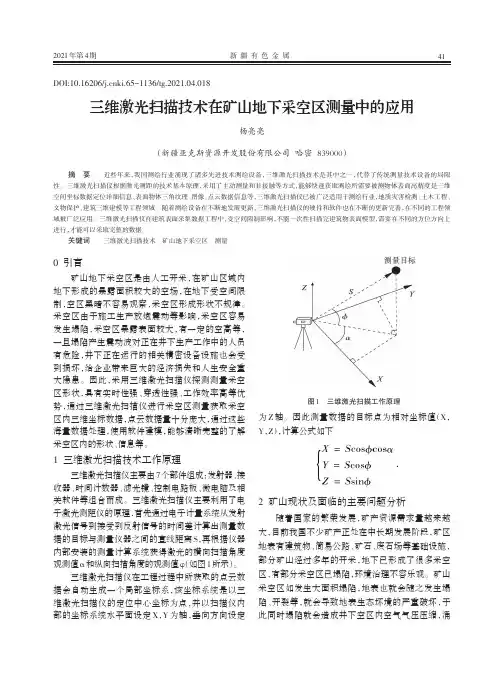
197管理及其他M anagement and other三维激光扫描仪在空区测量中的运用罗 平(玉溪大红山矿业有限公司,云南 玉溪 653405)摘 要:本文主要阐述三维激光扫描仪在露天、井下工程生产、建设中对采空区实施扫描测量,集中扫描数据处理,反映采空区的真实空间现状,提高采空区探测效率及采空区测量的准确性,为采空区治理和采矿生产安全提供准确的测量数据和测量图件。
关键词:三维激光扫描仪;采空区测量;采空区空间位置图件;设计依据;生产安全中图分类号:P234.4 文献标识码:A 文章编号:11-5004(2020)13-0197-2收稿日期:2020-07作者简介:罗平,男,生于1969年,汉族,云南弥勒人,本科,测量工程师,注册安全工程师,研究方向:测量工程、采矿工程。
玉溪大红山矿业有限公司浅部熔岩铁矿露天采矿工程于2011年初建成投产,开采矿体为浅部Ⅱ5、Ⅲ2等铁矿体,目前境界内保有B+C+D 级地质资源储量3059万t,地质品位TFe19.50%,设计采出矿石量约3006万t。
玉溪大红山矿业有限公司浅部熔岩铁矿露天采矿工程建成前,已形成部分采空区。
一部分是1993年~1999年间民采形成的采空区,该部分空区处于勘探线A28~A39之间,在露天采场的东北边,标高约在800m ~900m 间,;另一部分是2005年前浅部10万t/a 采矿工程开采形成的空区,空区处于A28~A33之间,分布标高约在750m ~970m 之间,全部分部在露天开采区域内。
随着露天生产不断推进,生产台阶下降,采场台阶与采空区越来越近,严重影响生产安全,为及时、准确治理采空区,需要快速精准测量绘制采空区现状图,掌握采空区空间位置,确保露天采矿安全。
由于玉溪大红山矿业有限公司浅部熔岩铁矿露天采矿工程采空区形成时间早,分布不规律,资料不齐全完整,巷道断面小,长久无人维护,空区内有毒有害气体超标;空区垮塌严重,顶板边帮浮石多;空间狭小,位置不清等不利因素,若采用常规测量(经纬仪加钢尺加塔尺、全站仪加钢尺等)方法测量采空区,,测量难度大,存在较大安全风险,效力低,测量人员劳动强度大,测量数据处理成图速度慢,造成采空区治理滞后,严重影响制约了露天矿生产,给露天矿生产造成较大安全隐患;为解决空区测量问题,玉溪大红山矿业有限公司引入能对采空区进行快速扫描测量,准确测量采空区位置、形态、体积计算等情况的OptechCMS V400三维激光扫描仪。
红外伪装的评价原则热成像系统依靠探测目标自身与背景的辐射差别来发现、识别目标。
而红外伪装则是要设法减小目标与背景之间的辐射差别。
由于目标的辐射能力与其温度和表面材料的发射率有关,热成像系统的温度、空间分辨能力是有限的,加之人眼的分辨能力是一定的,这就为红外伪装提供了可能。
目标与背景之间的辐射差别和和热成像系统的实际性能决定了红外隐身的难易程度,因此红外隐身应该以目标、背景特性和热成像系统的实际性能为原则。
目标与背景的辐射差别可以用其等效黑体温差来表示,目标与背景的等效黑体温差减小到一定程度就能够起到红外隐身的作用。
另外,如果目标等效热图尺寸减小到一定程度,即使目标与背景的等效黑体温差较大,热成像系统也不能识别目标,便也能起到红外隐身的作用。
全面反映热成像系统总体性能的参数是最小可分辨温差MRTD ,它同时反映仪器的温度、空间分辨能力,计入了系统各个环节对仪器性能的影响,并且与目标的正确判读概率相联系,因而能够代表仪器的观察能力。
热成像系统的MRTD 是实验室参数,在实际应用中可以用一条指数曲线拟合,美军《野战手册》中采用下式:sTT MRTD()MRTD e βf f = (1)式中,T f 为目标的空间频率,单位为周/mrad ;βs 为垂直方向的瞬时视场角。
T f 可由下式表示:T nRf H=(2)式中,R 为观测距离,单位为km ;H 为真实目标宽度,单位为m ;n 为视觉探测等级所要求的线对数,按照强生准则,发现级别时n =1。
当系统用于实际目标探测时,目标特性和环境条件并不满足实验室的标准条件。
因此,必须对MRTD 进行修正。
如果不考虑目标不同形状和不同判读等级要求以及背景温度起伏这几个实际使用条件对热成像系统性能的影响,把仪器的实验室MRTD 值变成实际中的MRTD '值,则换算关系可以写成()s TT MRTD e βf f ' (3)式中,m 为等效图案中每根线条的长宽比,可由下式计算得到:2nLm H=(4)n=1时,L 和H 分别是真实目标的长度和宽度。
ESCAN-3三维扫描仪技术方案1 公司介绍杭州思看科技有限公司是由海归博士、行业专家、青年科技骨干组成的高科技企业。
公司坐落在浙江杭州的未来科技城内,毗邻阿里巴巴淘宝城,主要从事手持式三维激光扫描仪、激光二维传感器等智能视觉检测设备的开发、研制和销售。
公司研发团队由美国海归博士领衔,依托浙江大学、浙江工业大学雄厚的科研实力,开发出一系列具有自主知识产权的、国内外领先的机电产品,包括手持式激光三维扫描仪、全局摄影测量系统和激光二维传感器等,公司产品已在国内许多大专院校、科研院所、汽车整车及零配件生产厂、大型机械加工企业和造型设计公司使用,深得用户的信赖和好评。
2产品介绍2.1概述ESCAN系列手持式激光三维激光扫描仪是杭州思看科技有限公司自主研发的产品,工作时采用多条线束激光来获取物体表面的三维点云,操作者可以将设备握在手上,可以实时调整仪器与被测物体之间的距离和角度,操作灵活方便简单易学。
在扫描大体积物体时,可以配合全局摄影测量系统,消除累计误差,提高全局扫描的精度。
该扫描仪可以方便携带到工业现场或者生产车间,并根据被扫描物体的大小、形状以及扫描的工况环境进行高效精确的扫描。
2.2 工作原理1)仪器上的两组相机可以分别获得投影到被扫描对象上的激光,该激光随对象形状发生变形,由于这两组相机事先经过准确标定,就可以通过计算获得激光线所投影的线状三维信息;2)仪器根据固定在被检测物体表面的视觉标记点来确定扫描仪在扫描过程中的空间位置,这些空间位置被用于空间位置转换;3)利用第1步获得的线状三维信息和第2步的扫描仪空间相对位置,当扫描仪移动时,不断获取激光所经过位置的三维信息,从而形成连续的三维数据。
2.3产品特点三束平行线激光扫描,扫描速度快;超高性价比,定价远低于市场上同类型手持式激光扫描仪,性能与高端扫描仪类似;被扫描物体可以移动,无需固定;目标点自动定位,不需要额外机械臂或其他跟踪设备;采用千兆网线连接,能支持远距离正常工作;两个高分辨率的图像采集单元及一套激光发射器,扫描更清晰精确;点云无分层,自动生成三维实体图形(三角网格面);手持任意扫描,随身携带,重量小于一公斤;可内、外扫描,也可在狭窄的空间扫描,如飞机驾驶舱,汽车内部仪表板等无局限。

microScan3 Core I/O AIDA 安全激光扫描仪所述产品microScan3 Core I/O AIDA制造商SICK AGErwin-Sick-Str.179183 Waldkirch, Germany德国法律信息本文档受版权保护。
其中涉及到的一切权利归西克公司所有。
只允许在版权法的范围内复制本文档的全部或部分内容。
未经西克公司的明确书面许可,不允许对文档进行修改、删减或翻译。
本文档所提及的商标为其各自所有者的资产。
© 西克公司版权所有。
原始文档本文档为西克股份公司的原始文档。
2操作指南 | microScan3 Core I/O AIDA8025406/1L9Q/2023-08-14 | SICK如有更改,恕不另行通知内容内容1关于本文档的 (7)1.1本文件的功能 (7)1.2适用范围 (7)1.3本操作指南的目标群体 (7)1.4更多信息 (7)1.5图标和文档规范 (8)2安全信息 (9)2.1基本安全提示 (9)2.2规定用途 (10)2.3不当使用 (10)2.4网络安全 (11)2.5合格的安全人员 (11)3产品说明 (12)3.1通过 SICK Product ID 标识产品 (12)3.2设备概览 (12)3.3结构和功能 (13)3.4产品特性 (14)3.4.1变型 (14)3.4.2接口 (15)3.4.3系统插头 (15)3.4.4区域类型 (15)3.4.5区域组 (17)3.5应用示例 (17)4项目 (20)4.1机器制造商 (20)4.2机器的运营商 (20)4.3设计 (20)4.3.1防止干扰 (21)4.3.2避免无保护区域 (22)4.3.3安全激光扫描仪的响应时间 (24)4.3.4参考轮廓监控 (24)4.3.5危险区域保护 (26)4.3.6危险点保护 (32)4.3.7访问保护 (35)4.3.8动态危险区域保护 (37)4.4与电气控制系统的连接 (42)4.4.1电磁兼容性 (43)4.4.2电压供给 (44)4.4.3USB 接口 (44)4.4.4OSSD (44)4.4.5电路示例 (45)8025406/1L9Q/2023-08-14 | SICK操作指南 | microScan3 Core I/O AIDA3如有更改,恕不另行通知内容4.5检查方案 (45)4.5.1调试中和特殊情况下的检查规划 (46)4.5.2定期检查的规划 (46)4.5.3检查提示 (47)5装配 (49)5.1安全性 (49)5.2拆封 (49)5.3安装流程 (49)5.3.1直接安装 (51)6电气安装 (52)6.1安全性 (52)6.2接口概览 (53)6.2.1microScan3 Core (53)6.3接口配置 (53)6.3.1带 M12 插塞接头的连接电缆 (54)6.3.2备用 FE 接口 (54)7系统配置 (55)7.1交货状态 (55)7.2Safety Designer 配置软件 (55)7.2.1安装 Safety Designer (55)7.2.2项目 (55)7.2.3用户界面 (56)7.2.4用户组 (56)7.2.5设定 (58)7.2.6配置 (58)7.2.7联网 (60)7.3概览 (60)7.3.1功能范围 (61)7.4读取配置 (62)7.5识别 (63)7.6应用 (64)7.7监控平面 (65)7.7.1监控范围的参数 (66)7.7.2安全激光扫描仪的参数 (67)7.8轮廓参考区域 (69)7.9区域 (70)7.9.1使用区域编辑器 (71)7.9.2创建区域组模型 (74)7.9.3导入和导出区域组和区域 (74)7.9.4背景图片 (74)7.9.5区域编辑器的设置 (75)7.9.6借助坐标编辑区域 (76)7.9.7绘入无法监控的区域 (77)4操作指南 | microScan3 Core I/O AIDA8025406/1L9Q/2023-08-14 | SICK如有更改,恕不另行通知内容7.9.8定义全局几何形状 (78)7.9.9建议区域 (78)7.10输入和输出,本地 (80)7.10.1关于一些信号的更多设置 (81)7.11监控事件 (82)7.11.1针对监控情况表格的设置 (82)7.11.2监控情况设置 (82)7.11.3关断路径 (83)7.11.4分配区域组 (83)7.11.5分配确定的关断行为 (83)7.11.6导入和导出监控事件表格 (84)7.12模拟 (85)7.13传输 (86)7.14启动和停止安全功能 (87)7.15报告 (88)7.16服务 (89)7.16.1设备重启 (89)7.16.2出厂设置 (89)7.16.3管理密码 (90)7.16.4访问管理 (90)7.16.5光学镜头罩调整 (91)7.16.6比较配置 (91)8调试 (93)8.1安全 (93)8.2校准 (93)8.3接通 (94)8.4在调试和发生变化时检查 (95)9操作 (96)9.1安全性 (96)9.2定期检查 (96)9.3显示元件 (96)9.3.1LED状态 (96)9.3.2利用显示屏的状态显示 (97)10维护 (99)10.1安全性 (99)10.2定期清洁 (99)10.3更换光学镜头罩 (100)10.4更换安全激光扫描仪 (102)10.4.1更换不带系统插件的安全激光扫描仪 (102)10.4.2完整更换安全激光扫描仪 (103)10.5更换系统插头 (103)10.6定期检查 (104)8025406/1L9Q/2023-08-14 | SICK操作指南 | microScan3 Core I/O AIDA5如有更改,恕不另行通知内容11故障排除 (105)11.1安全 (105)11.2利用显示屏的详细诊断 (105)11.3显示屏上的故障显示 (106)11.4利用 Safety Designer 诊断 (108)11.4.1数据记录器 (108)11.4.2事件历史 (110)11.4.3消息历史 (112)12停机 (113)12.1废物处理 (113)13技术数据 (114)13.1变型概览 (114)13.2版本号和功能范围 (114)13.3数据表 (115)13.3.1microScan3 Core I/O AIDA (115)13.4响应时间 (120)13.5OSSD 内部测试的时间分布 (121)13.6扫描范围 (122)13.7尺寸图 (123)14订购信息 (124)14.1供货范围 (124)14.2订购信息 (124)15备件 (125)15.1不带系统插件的安全激光扫描仪 (125)15.2系统插头 (125)15.3更多备件 (125)16附件 (126)16.1其他配件 (126)17术语表 (127)18附件 (129)18.1合规性和证书 (129)18.1.1符合歐盟聲明 (129)18.1.2符合英國聲明 (129)18.2关于标准的注意事项 (129)18.3初次试运行和试运行核对表 (131)18.4保护设备不受相邻系统影响的安装方式 (131)19图片目录 (135)20表格目录 (137)6操作指南 | microScan3 Core I/O AIDA8025406/1L9Q/2023-08-14 | SICK如有更改,恕不另行通知关于本文档的 11关于本文档的1.1本文件的功能本操作指南中包含了安全激光扫描仪生命周期中必需的各项信息。
RPLIDAR A3 Low Cost 360 Degree Laser Range Scanner Development Kit User Manual Model:A3M12018-01-31rev.1.0CONTENTS (1)OVERVIEW (3)I TEMS IN THE D EVELOPMENT K IT (3)RPLIDAR A3 (4)USB A DAPTER (4)CONNECTION AND USAGE (5)C ONNECTION (5)I NSTALL D RIVER FOR THE USB A DAPTER (5)R UN D EMO A PPLICATION (7)T ROUBLESHOOTING (9)M OTOR S PEED A DJUSTMENT (9)SDK INTRODUCTION AND USAGE (11)RPLIDAR A3P IN D EFINITION AND S PECIFICATION (11)P IN D EFINITION FOR THE USB A DAPTER (12)C ONFIGURE RPLIDAR A3S CAN F REQUENCY (14)SDK U SAGE (14)OPERATION RECOMMENDATION (15)P RE-H EATING FOR B EST P ERFORMANCE (15)A MBIENT T EMPERATURE (15)A MBIENT L IGHT (15)REVISION HISTORY (16)APPENDIX (17)I MAGE AND T ABLE I NDEX (17)OverviewRPLIDAR A3 development kit includes the matched tools used for evaluating RPLIDAR’s performance and initial development. After connecting the RPLIDAR A3 with PC via USB cable and connecting the power adapter to the USB cable, users can observe the cloud map of the environment scanning point collected by the RPLIDAR in RoboStudio and start development based on the SDK.Items in the Development KitRPLIDAR Development Kit contains:o RPLIDAR(PWM motor driver embedded)o USB Adaptero Micro-USB cableo Power adapterRPLIDARPower AdapterUSB adapterMicro-USBcableFigure 1-1 Items in the RPLIDAR Development KitRPLIDAR A3Figure 1-2 The RPLIDARThe RPLIDAR A3 development kit contains standard RPLIDAR A3 unit (A3M1). The RPLIDAR is embedded with logic IO drivable motor controller which can be used to configure the scan frequency by tuning motor speed. Developers can also choose to turn off the motor for power saving purpose.RPLIDAR usage and interface definition will be introduced in the coming sections. USB AdapterThe USB adapter comes with a dial switch. It can be used to switch the Baud rate from 115200 to 256000 or vice versa, which is compatible with RPLIDAR A3 and former RPLIDAR series. Please note that the Baud rate should be set as 256000 if the USB adapter is connected with RPLIDAR A3..Figure 1-3 RPLIDAR AdapterConnection and UsageConnectionRPLIDAR A3 can be easily connected to PC according to the following steps.1)Connect RPLIDAR A3 with the USB adapter.Figure 2-1 Connect RPLIDAR A3 and USB Adapter2)Connect the USB adapter to your PC via the Micro-USB cable. If the PC ison, after connecting the USB cable to your PC and connecting the poweradapter to the USB cable, the indicator light of the USB will light up but theRPLIDAR will not start scanning.Figure 2-2 Connect the USB Adapter to PC via Micro-USB Cable Install Driver for the USB AdapterThe USB adapter converts UART to USB by using CP2102 chip. You need to install the device driver for the chip. The driver can be found in the provided SDK package or downloaded from Silicon Labs’ official website:/products/mcu/Pages/USBtoUARTBridgeVCPDrivers.aspxHere’s the installation steps in Windows: after connecting the RPLIDAR with PC, please find the driver file “CP210x VCP Windows” and choose correct operating system version accordingly: x86 for 32-bit OS and x64 for 64-bit OS.Figure 2-3 Choose USB Adapter Driver for InstallationFigure 2-4 Start Page of USB Adapter Driver InstallationAfter Installing the driver according to the above installation steps, you will see corresponding serial port name in the [Control Panel] -> [Device and Printers]. Please refer to the below figure.Figure 2-5 Recognized Serial Port Name Matched with the USB AdapterRun Demo ApplicationSLAMTEC provides a Lidars plugin in RoboStudio for users in test and evaluation. You can view the scan result directly in the UI and save the scan result to files for further processing.This GUI demo can only run under Windows. For Linux and MacOS users, please refer to the other simple demo provided in the SDK.Please make sure you have connected RPLIDAR to PC by using USB adapter and installed the device driver correctly before running the demo application in RoboStudio. Launch RoboStudio and log in.Figure 2-6 RoboStudio Login PageIf the connection is ok, you shall see the user interface is shown as below.1. Click File->Lidars to open the lidar control panel in the left;2. Click Serial Ports to extend the lidar lists and you’ll find the RPLIDAR A3 previously connected to your PC;3. Click the RPLIDAR A3 icon to extend the tool buttons below the icon: the left one is to adjust the motor speed while the right one is to open the tool bar in the major work area as shown in Figure 2-7.Figure 2-7 The Lidar Plugin in RoboStudioThe serial number, version and model of the RPLIDAR A3 will show next with its icon in the lidar control panel. The supported commands of RPLIDAR are showed in the tool bar. The descriptions are listed in the bellow table.ButtonFigure 2-8 The Supported Commands of RPLIDAR in RoboStudioPress the Start Scan button,the scan data will be displayed as below(by default, the motor rotating speed should be about 10Hz.):Figure 2-9 The Scan Outline by RPLIDAR in RoboStudioRight click in the major working area to choose a range so as to zoom in or out the view.The scan frequency is also showed in the above interface. TroubleshootingWhen the scan core or the laser power works abnormally, the scan core will enter protection mode. This state can be retrieved via SDK API. If such scenariohappened, please send restart command to reset the scan core.Motor Speed AdjustmentDuring the running process, different motor rotating speed can be achieved bypressing the button, which can fit in different working environments or meet specific requirements. There will be a speed adjustment dialog box and dash board popped up for users to enter required speed. After entering a value, the motor will work as the settled rotating speed automatically. User can also drag the sliding handle to the required rotating speed.The current actual rotating speed will show in the upper left corner of the major work area. For instance, the actual rotating speed in the following screenshot is 11.92Hz.Figure 2-10 The Motor Speed Adjustment Dialogue of RPLIDAR in RoboStudioRPLIDAR A3 Pin Definition and SpecificationRPLIDAR A3 is using XH2.54-5P specification plug. Please use it with socket that meet the specification of XH2.54-5P. The detailed pin definition is shown as below:Figure 3-1 RPLIDAR A3 PinsFigure 3-2 RPLIDAR Pin Definition and SpecificationRPLIDAR A3 uses the one 5V DC power supply for powering the scan motor and the scan core at the same time. No extra power is required.With build-in and speed-adjustable motor driver, RPLIDAR A3 can control the start, the stop and the rotating speed of the motor via the MOTOCTL signal. o Reference Design for RPLIDAR developmentSDK Introduction and UsageColor Signal name Type DescriptionMinimum Typical MaximumRed VCC Power Power supply for the wholeRPLIDAR4.9V5V 5.5V Yellow TX Output Serial output for RPLIDAR scan core0V 3.3V 3.5V Green RX Input Serial input for RPLIDAR scan core 0V 3.3V 3.5V Black GND Power GND0V 0V 0V BlueMOTOCTLInput (pull down)Enable pin for RPLIDAR scan motor/PWM control signal (active high)0V3.3V5VRedXH2.54-5PVCCTXRXGND MOTOCTLFigure 3-3 RPLIDAR A3 Pins Reference DesignPin Definition for the USB AdapterThe USB adapter is also using XH2.54-5P specification socket, and it can be connected with RPLIDAR A3 directly. The pin definition is the same as the RPLIDAR A3.Power adapter specificationInputFigure 3-4 RPLIDAR Power Adapter Input SpecificationItemUnitMinTypical Max CommentsInput voltage VAC 90 100-240 264 Single phase Input frequency Hz 47 50-60 63Input current A - - 0.4 When the input is 100Vac and in maximum loadInrush current (cold boot)A--30When the input is 230Vac and in maximum loadAverage efficiency - 78.7% - -When the input is 115/230Vac and outputting 100%/75%/50%/25% of the load, the average efficiency is lower than 78.7%.Input no-load powerconsumptionW- - 0.1When the input is 100Vac-240Vac, the input no-load power consumption is lower than 0.1W.V5.0 GND TX RXMOTOCTLPower(5V DC)UART PWM Generator MCU/DSPRPLIDAROutputFigure 3-5 RPLIDAR Power Adapter Output SpecificationRipple wave and noise: When testing the ripple and noise, choose20Mhz wideband when setting the oscilloscope, and the output end should have a 0.1uF ceramic capacitor and a 10uF electrolytic capacitor connected in parallel. (the input should be in 100Vac-240Vac).Line/load regulationFigure 3-6 RPLIDAR Power Adapter Line/Load RegulationTurn-on delay3s when the input is 100Vac and at maximum load.2s when the input is 240Vac and at maximum load.Holdup timeAt least 30ms when shut the input is between 240Vac/50Hz and at maximum load.Rise time40ms when the input is between 100Vac-240 Vac and at maximum load.Output overshoot/undershoot7% is a maximum when powering on or off.Output load transient responseWhen the voltage output is between 4.75V and 5.25V, the load will change from 25% at maximum to 50% then back to 25%, or from 50% at maximum to 75% then back to 50%. The slope is 0.5A/us. The frequency is 100Hz. Output overshoot is lower than ±5%.Protection requirementShort circuit protection: when outputting short circuit, the input power will lower and will not have any affect. After ending the short circuit, the system will recover automatically.Overcurrent protectionOCSET: within 110%-180% of maximum load (with rated voltage), when outputting overcurrent, the output will go to hiccup mode. After ending the overcurrent, the system will recover automatically.Configure RPLIDAR A3 Scan FrequencyThe motor speed control signal MOTOCTL can be configured directly via the USB adapter of RPLIDAR A3. Therefore, the RPLIDAR A3’s scan frequency can be modified by invoking the related functions in the SDK to configure the motor speed.Without the USB adapter, users can also control the speed by setting the PWM duty cycle of MOTOCTL. Please note that the PWM frequency is 20kHz. For more detailed parameter and index, please refer to the datasheet.Please refer to the RPLIDAR protocol and application note for more information and the SDK for the sample code on RPLIDAR scan frequency.SDK UsageSLAMTEC provides RPLIDAR SDK support on both Windows and Linux platform. And users can embed the SDK source code to other operational system or embedded system quickly. Please refer to the SDK document for more information.Pre-Heating for Best PerformanceThe scan core will be heating when start working. We recommend pre-heating RPLIDAR (Start the scan mode and the scan motor is rotating) for more than 2 minutes to get the best measurement accuracy.Ambient TemperatureRPLIDAR’s measurement resolution is sensitive to the ambient temperature. Improper use may even damage the sensor. Please avoid using RPLIDAR in extreme high temperature (>40 degree) and too low temperature (<-10 degree).Ambient LightCompared with RPLIDAR A2 series, RPLIDAR A3 performs better to resist ambient light interference, which supports it to work properly in outdoor environment.RPLIDAR A3 can work in two modes: enhanced mode and outdoor mode.Enhanced mode is designed for indoor environment. Typical indoor light (including situations without light) will not affect the performance of RPLIDAR. Strong light (such as high power laser) will harm the optical system of LIDAR, which should be avoided.During outdoor mode, RPLIDAR A3 can work normally to detect objects under direct ambient light. However, the ranging distance might be shorter under strong direct sunlight and it is still necessary to protect the optical system from direct sunlight.Image and Table IndexF IGURE 1-1I TEMS IN THE RPLIDAR D EVELOPMENT K IT (3)F IGURE 1-2T HE RPLIDAR (4)F IGURE 1-3RPLIDAR A DAPTER (4)F IGURE 2-1C ONNECT RPLIDAR A3 AND USB A DAPTER (5)F IGURE 2-2C ONNECT THE USB A DAPTER TO PC VIA M ICRO-USB C ABLE (5)F IGURE 2-3C HOOSE USB A DAPTER D RIVER FOR I NSTALLATION (6)F IGURE 2-4S TART P AGE OF USB A DAPTER D RIVER I NSTALLATION (6)F IGURE 2-5R ECOGNIZED S ERIAL P ORT N AME M ATCHED WITH THE USB A DAPTER (6)F IGURE 2-6R OBO S TUDIO L OGIN P AGE (7)F IGURE 2-7T HE L IDAR P LUGIN IN R OBO S TUDIO (8)F IGURE 2-8T HE S UPPORTED C OMMANDS OF RPLIDAR IN R OBO S TUDIO (8)F IGURE 2-9T HE S CAN O UTLINE BY RPLIDAR IN R OBO S TUDIO (9)F IGURE 2-10T HE M OTOR S PEED A DJUSTMENT D IALOGUE OF RPLIDAR IN R OBO S TUDIO (10)F IGURE 3-1RPLIDAR A3P INS (11)F IGURE 3-2RPLIDAR P IN D EFINITION AND S PECIFICATION (11)F IGURE 3-3RPLIDAR A3P INS R EFERENCE D ESIGN (12)F IGURE 3-4RPLIDAR P OWER A DAPTER I NPUT S PECIFICATION (12)F IGURE 3-5RPLIDAR P OWER A DAPTER O UTPUT S PECIFICATION (13)F IGURE 3-6RPLIDAR P OWER A DAPTER L INE/L OAD R EGULATION (13)。
测绘测量革命性产品美国Surphaser三维激测绘测量革命性产品-----美国Surphaser三维激光扫描仪00一、三维激光扫描技术简介1 三维激光扫描仪原理与应用1.1三维激光扫描仪原理三维激光扫描仪主要由激光发射器、接收器、时间计数器、马达控制可旋转的滤光镜、控制电路板、微电脑和软件等组成。
激光脉冲发射器周期地驱动激光二极管发射激光脉冲,由接收透镜接受目标表面后向反射信号,产生接收信号,利用稳定的石英时钟对发射与接收时间差作计数,最后由微电脑通过软件,按照算法处理原始数据,从中计算出采样点的空间距离;通过传动装置的扫描运动,完成对物体的全方位扫描;然后进行数据整理从而获取目标表面的点云数据。
1.2三维坐标确定方法1.3 三维激光扫描仪应用量化实景对象、三维信息采集、逆向三维重构、逆向三维建模空间数据反求、对象逆程设计、预研仿研仿制、虚拟现实应用正向工程反证、逆向工程实施、概念设计仿真、逆向制图还原结构特性分析、试验工程仿真、后数据测计量、目标形变监测工程技效评估、电脑模拟实战、环境适应仿真、工程力学分析对抗模拟推演、企业无纸操作、虚拟设计制造、科目效果测试整合三维资源、创建三维流程、工装工艺规划、改进改造工程历史资源修复、任务方案优化、对象加载仿真、设施维护维修应用领域:包括:核电站,文物,考古,建筑业,航天,航空,船舶,制造,军工,军事,石化,医学,水利,能源,电力,交通,机械,影视,教学,科研,汽车,公安,市政建设......2 点云数据处理与建模2.1 点云的预处理由于扫描过程中外界环境因素对扫描目标的阻挡和遮掩,如移动的车辆、行人树木的遮挡,及实体本身的反射特性不均匀,需要对点云经行过滤,剔除点云数据内含有的不稳定点和错误点。
实际操作中,需要选择合适的过滤算法来配合这一过程自动完成。
2.2 点云配准使用控制点配准,将点云配准到控制网坐标系下;靶标缺失的点云,利用公共区域寻找同名点对其进行两两配准,当同名点对不能找到时,利用人工配准法。
扫描鹰无人机- 简介波音公司与英西图公司(Insitu)为军方合作研制了这种低成本、长航时无人机系统,并在战场上为军方协助使用该系统。
"扫描鹰"在美军使用的20个月内已累计超过2万作战飞行小时。
波音澳大利亚公司总裁Lindsay Pear说,"扫描鹰"已成为美军保护部队安全的最有效工具之一。
波音澳大利亚公司执行官Andrew Duggan说,"扫描鹰"能通过低空侦察为指挥官提供实时、清晰的战场图像,而且由于"扫描鹰"体积较小和较静音的发动机,即使在低空飞行也很难被敌方发现。
"扫描鹰"以较小的体积综合了长航时和全稳载荷能力,在作战地点能连续执行15小时的侦察和监视。
其弹射装置和"天钩"使"扫描鹰"可以从陆地或海上发射和回收,与同等级的其他系统相比灵活性更强。
扫描鹰"通过一个楔形气压弹射器自主发射,然后通过GPS和机载飞行控制系统按照预编程或操作人员指令飞行。
完成任务后由"天钩"系统回收,即"扫描鹰"钩在一根15米高的杆子所挂的绳子上。
该专利系统使"扫描鹰"摆脱跑道的**,能在崎岖的山地或舰船上部署。
扫描鹰无人机- 主要功能美海军将“扫描鹰”部署在多种军舰上使用,包括USS Mahan驱逐舰、USS Whidbey Island两栖舰以及保障船只和小型作战舰。
同时“扫描鹰”还在全球多处服务于美军其他军种以及国际用户。
“扫描鹰”UAS为长航时全自主无人机,携带有光电与红外照相机,能跟踪静止与移动目标。
该机能在16000英尺(4876米)高空飞行并在战场上空飞行超过24小时,提供持久低空ISR 服务。
“扫描鹰”从SuperWedge气动弹射器上自主发射,按预编程或操作员操控的任务飞行。
英西图专利SkyHook?系统用于无人机回收,该系统通过悬挂在50英尺(15米)高塔上的绳索抓住无人机。
激光三维扫描系统CMS专业激光测绘性 能测距:500 m @ 90%反射率目标 200 m @ 20%反射率目标 水平角度范围:360° 竖直角度范围:290° 测距精度:±2cm 测距分辨率:1mm 角度精度:0.1° 角度分辨率:0.022° 最小步进角:0.25° 扫描时间:6分钟每次扫描点数:52200(360°×290°范围,0.25°间距) 人眼安全:内置测距激光:一级激光 (FDA 21 CFR 1040) 可见瞄准激光:二级激光 (FDA 21 CFR 1040) 数据输出数据格式:DXF、ASCII、XYZ 通信方式:RS-232C、USB、红外控制界面:Palm PDA,可遥控操作,遥控范围50米物理特性电源:24VDC工作温度:-10℃ ~ +50℃存储温度:-40℃ ~ +50℃探头重量:5.4kg探头尺寸:522(L)×157(W)×122(H)mm 电源重量:8.3kg电源尺寸:270(L)×247(W)×175(H)mm 支撑系统:229(L)×230(W)×250(H)mm 延长杆尺寸:193(L)×23(W)×25(H)cm 延长杆重量:44.5kg防护等级:IP65 更高需定制配 件笔记本电脑/掌上电脑电源线数据传输线电池及充电器垂直扫描配件水平扫描配件体积计算软件三脚架 背包手提箱 危险区使用中国大陆煤安认证MAK100028所有技术规格如有变动,恕不另行通知。
Instrument中国总代理:约克仪器公司呼和浩特办事处(内蒙古自治区)邮编:010020手机:(0)139****5115邮箱:**************************地址: 呼和浩特市赛罕区锡林南路盈嘉国际1004室武汉(华中地区)电话: (027)85715800 85715827 传真: (027)85715817邮编: 430022 手机: (0)139********邮箱:************************地址: 湖北省武汉市汉口解放大道688号武汉广场写字楼1816室深圳(华南地区)电话: (0755)88827500 88827600 传真: (0755)83865850邮编:518048手机:(0)138****0260邮箱:***************************地址: 深圳市福田区益田路3008号皇都广场C 座会展时代中心2503室上海(华东地区)电话: (021)51085568(中继线) 6280180162802802 62803803 62807807 62809809传真: (021)62806262 邮编: 200052手机: (0)138******** 邮箱: s h a n g h a i @地址: 上海市延安西路1228号嘉利大厦10层A 座重庆(重庆、贵州)电话: (023)61586360 61586370 传真: (023)61586178邮编: 400039 手机: (0)133****9270邮箱: chongqing#地址: 重庆市高新区石杨路44号一城新界A 栋5-5西安(西北地区)88153264 88153266 传真:************邮编:710075 手机:(0)133****2032邮箱:*****************************地址:西安市高新区科技路37号海星城市广场A 区1515室北京总部(华北、东北) 业务Ⅰ部邮编: 100089地址: 北京市海淀区万柳长春桥路11号亿城大厦C2座1504室山东办事处(山东省)邮编:250001手机:(0)136****8055邮箱:**********************地址: 山东省济南市市中区经四路万达广场C 座2612室成都(四川、云南)邮编:610016手机:(0)139****0165邮箱:**************************地址: 成都市锦江区大业路6号上普财富中心C 座1101室新疆办事处邮编:830011手机:(0)139****1955邮箱:***************************地址:乌鲁木齐市北京北路3号西部豪庭小区4栋605室应 用地质编录如地质填图、探矿工程地质编录、采样编录等;边坡监控实时监测边坡稳定性,可提供三维立体数据;采矿工程开挖体积、开挖方位、地形变形、采矿产量、充填量计算、爆破效率等;探矿工程用于槽探、井探、坑道、采石场等三维成像;矿床勘探用于矿体结构、储量估算、品位分析等;隧道巷道精准三维测量,变形监测、超欠挖、巷道的修复等;数字化矿山三维点云数据可直接导入全球任何数字矿业软件;采空区高精度的三维采空数据,空区容积、位置、形状,如片帮与冒落;★ ★ ★ ★ 工作模式功能特色。