第6讲_系统动力学及Vensim建模 PPT
- 格式:ppt
- 大小:1.05 MB
- 文档页数:63

系统动力学模型构建与Vensim 软件应用教程第一部分系统动力学与Vensim 软件一、系统动力学概述系统动力学(SystemDynamics)是一门分析研究信息反馈系统的学科,也是一门认识系统问题和解决系统问题交叉的综合性的新学科。
系统动力学认为,系统的行为模式与特性主要地取决于其内部的动态结构与反馈机制。
系统:相互作用诸单元的复合体,例如:社会、经济、生态系统。
反馈:系统内同一单元或同一子块其输出与输入间的关系。
对整个系统而言,"反馈"则指系统输出与来自外部环境的输入的关系。
反馈可以从单元或子块或系统的输出直接联至其相应的输入,也可以经由媒介其他单元、子块、甚至其他系统实现。
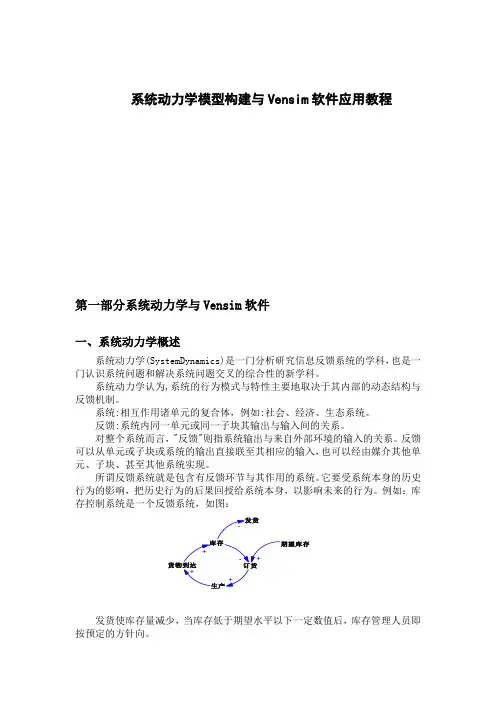
所谓反馈系统就是包含有反馈环节与其作用的系统。
它要受系统本身的历史行为的影响,把历史行为的后果回授给系统本身,以影响未来的行为。
例如:库存控制系统是一个反馈系统,如图:发货使库存量减少,当库存低于期望水平以下一定数值后,库存管理人员即按预定的方针向。
生产部门订货,货物经一定延迟到达,然后使库存量逐渐回升。
反映库存当前水平的信息经过订货与生产部门的传递最终又以来自生产部门的货物的形式返回库存。
正反馈的特点是,能产生自身运动的加强过程,在此过程中运动或动作所引起的后果将回授,使原来的趋势得到加强;负反馈的特点是,能自动寻求给定的目标,未达到(或者未趋近)目标时将不断作出响应;具有正反馈特性的回路称为正反馈回路,具有负反馈特点的回路则称为负反馈回路(或称寻的回路);分别以上述两种回路起主导作用的系统则称之为正反馈系统与负反馈系统(或称寻的系统)。
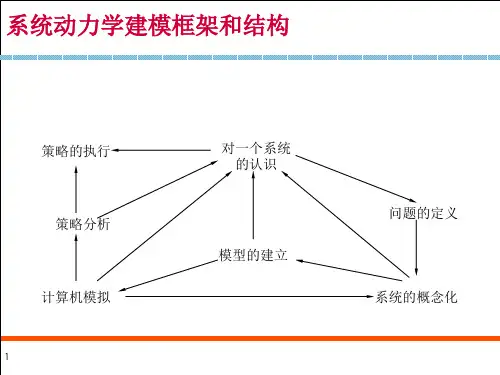
回路的概念最简单的表示方法是图形,系统动力学中常用三种图形表示法:系统结构框图(structurediagram)因果关系图(causalrelationshipdiagram)流图(stockandflowdiagram)系统动力学解决问题大体可分为五步:第一步要用系统动力学的理论、原理和方法对研究对象进行系统分析。
系统动力学模型构建与Vensim软件应用教程
教师简介
王普,博士,讲师,北京理工大学管理科学与工程专业博士,高校教师。
课程介绍
《系统动力学模型构建与Vensim软件应用课程》主要介绍了系统动力学模型的构建过程以及借助Vensim软件实现模型的求解过程。
通过本课程的学习,一方面可以掌握系统动力学模型的基本原理和建模实现。
另一方面,可以掌握Vensim软件对系统动力学模型进行求解的操作步骤和方法。
本课程适合初学者听,听完后,可以掌握基本的系统动力学模型构建与Vensim软件操作方法与结果解读。
本教程为高清视频,画面清晰生动,身临其境。
同步教程,举一反三,效果翻倍。
可登陆中国科学软件网或科学软件学习网免费试看。
课程大纲
本视频课程分为8讲,共11个视频,时长为522分。


系统动力学模型构建与Vensim软件应用教程教师简介
王普,博士,讲师,北京理工大学管理科学与工程专业博士,高校教师。
课程介绍
《系统动力学模型构建与Vensim软件应用课程》主要介绍了系统动力学模型的构建过程以及借助Vensim软件实现模型的求解过程。
通过本课程的学习,一方面可以掌握系统动力学模型的基本原理和建模实现。
另一方面,可以掌握V ensim软件对系统动力学模型进行求解的操作步骤和方法。
本课程适合初学者听,听完后,可以掌握基本的系统动力学模型构建与Vensim软件操作方法与结果解读。
本教程为高清视频,画面清晰生动,身临其境。
同步教程,举一反三,效果翻倍。
可登陆中国科学软件网或科学软件学习网免费试看。
课程大纲
本视频课程分为8讲,共11个视频,时长为522分。
“捕食者-被捕食者”——基于Vensim的模型模拟14307130034光电信息科学与工程毛臻岑-目录-一、模型背景 (3)二、建模过程 (4)2.1新建model (4)2.2创建变量、设置方程 (4)2.3绘制因果图流图 (6)三、运行和调试模型: (6)3.1以原始值运行模拟 (7)3.2调整参数,出现平衡 (14)引用及参考: (21)一、模型背景本文参考捕食者-被捕食者模型(Predator-Prey Model),参考《社会系统动力学》第58页所示流图。
二、建模过程2.1新建model开启Vensim 6.4b PLE新建model,参数设置如下:2.2创建变量、设置方程2.3绘制因果图流图三、运行和调试模型:3.1以原始值运行模拟prey:predator:Time(Month)predator Runs:predator 0Current10113217322428535644755869987 10109 111373.2调整参数,出现平衡设置predator死亡速率为1/16,则两个种群的数量基本上达到平衡:prey:Time(Month)prey Runs:prey 0Current1000 11300 21620 31878 41878 51878 61878 71878 81878 91878 101878 111878predator:引用及参考:1.李旭著:社会系统动力学:政策研究的原理、方法和应用[M].上海:复旦大学出版社,ISBN:978-7-309-06360-82.朱老师的ppt。