汽车驱动防滑系统(1)
- 格式:docx
- 大小:75.26 KB
- 文档页数:6

驱动防滑控制系统名词解释(一)驱动防滑控制系统名词解释1. 驱动防滑控制系统 (Traction Control System, TCS)•解释:驱动防滑控制系统是一种车辆动力系统中的电子控制系统,旨在通过监测和控制车轮的动力输出,防止车辆在行驶过程中因轮胎打滑而失去牵引力和控制。
•示例:当车辆在高速行驶时,如果车轮因为路面湿滑而发生打滑,驱动防滑控制系统会自动减少发动机的功率输出,并对制动系统施加适度的制动力,从而防止车辆失去控制。
2. 打滑 (Wheel Slip)•解释:打滑是指车轮在与地面接触时无法保持粘附力,从而导致轮胎与地面之间发生相对滑动的现象。
•示例:当车辆在雨天行驶时,如果车速过快,车轮与湿滑的道路之间的摩擦力不足,就会发生打滑现象,导致车辆失去牵引力和操控能力。
3. 牵引力 (Traction)•解释:牵引力是指车辆通过车轮与地面之间的摩擦力来提供前进或加速的力量。
•示例:当车辆行驶时,车轮与地面之间的摩擦力使得车辆能够保持稳定的牵引力,从而行驶或加速。
4. 动力输出 (Power Output)•解释:动力输出是指发动机传递给车轮的能量。
•示例:当驾驶员踩下油门踏板时,发动机会产生动力输出,通过传动系统将动力传递给车轮,从而推动车辆前进。
5. 电子控制系统 (Electronic Control System)•解释:电子控制系统是利用电子技术来控制车辆的系统,包括传感器、控制单元和执行器等组成部分。
•示例:驱动防滑控制系统中的电子控制系统通过车轮传感器来监测车辆的运动状态,并通过控制单元来调整发动机动力输出和制动力,以实现驱动防滑的控制。
以上是对驱动防滑控制系统相关名词的解释和示例。
通过驱动防滑控制系统,车辆可以在险境中更好地保持操控性能,提高行驶安全性。
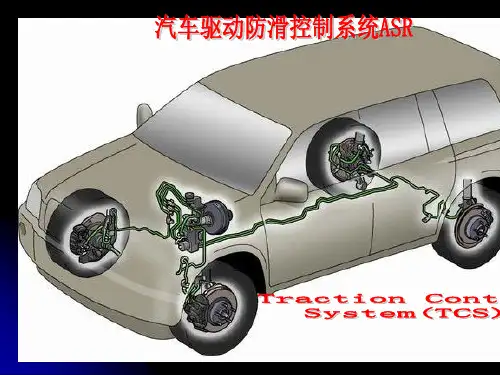
驱动防滑系统的工作原理驱动防滑系统是一种车辆动力控制系统,通过对车轮进行控制来提高车辆的稳定性和操控性。
该系统的工作原理是通过传感器监测车轮的转速和其他相关参数,然后根据这些数据来进行实时调整,从而防止车轮打滑。
驱动防滑系统主要由以下几个组件组成:传感器、控制单元、执行器和制动系统。
传感器负责监测车轮的转速和其他参数,如转向角度、加速度等。
控制单元则根据传感器提供的数据进行计算和判断,并发送指令给执行器。
执行器根据控制单元的指令来调整车轮的转速,以达到防止打滑的效果。
制动系统则作为辅助手段,在必要时使用制动力来控制车轮的转速。
具体来说,驱动防滑系统的工作原理如下:1. 车轮转速监测:传感器安装在每个车轮上,用于监测车轮的转速。
它们可以通过磁传感器、光传感器或者其他技术来实现。
传感器将监测到的转速数据发送给控制单元。
2. 控制单元计算:控制单元接收传感器发送的数据,并进行实时计算和判断。
它会比较不同车轮的转速,判断是否存在打滑情况。
如果发现某个车轮的转速明显高于其他车轮,就认为该车轮可能存在打滑,并采取相应措施。
3. 转速调整:控制单元根据计算结果,向执行器发送指令来调整车轮的转速。
执行器可以采用多种方式实现,如通过控制发动机输出功率、调整刹车压力等。
具体的调整方式取决于车辆的具体设计和驱动防滑系统的实现方式。
4. 制动辅助:在必要时,驱动防滑系统可以通过制动系统来辅助调整车轮的转速。
例如,在某个车轮出现打滑时,控制单元可以发送指令给制动系统,增加该车轮的制动力,以减少打滑情况。
总的来说,驱动防滑系统通过监测车轮的转速和其他参数,实时计算并判断车轮是否存在打滑情况,然后通过调整车轮的转速来防止打滑。
这种系统可以提高车辆的稳定性和操控性,减少在低摩擦路面或急刹车时的打滑风险,提高车辆的安全性和可靠性。
需要注意的是,驱动防滑系统并不能完全消除车辆打滑的可能性,它只能在一定程度上减少打滑风险。
此外,不同车辆的驱动防滑系统可能会有不同的实现方式和性能表现,具体效果会受到车辆设计、传感器精度、控制算法等多种因素的影响。
简述驱动防滑系统的控制方法
驱动防滑系统(ASR)的控制方法主要包括以下几种:
1. 逻辑门限值控制:这种方法不需要建立具体的数学模型,简化了驱动防滑控制器的开发过程。
2. PID控制:这是一种常用的控制方法,通过比例、积分和微分三个环节来调整系统参数,以达到理想的控制效果。
3. 最优控制:这种方法通过优化系统参数,使系统性能达到最优。
4. 神经网络控制:利用神经网络的自学习能力,对系统进行控制。
5. 滑模控制:在系统状态发生变化时,滑模控制能够快速响应并稳定系统。
6. 模型跟踪控制:使控制系统按照预定的模型进行工作,以达到理想的控制效果。
这些控制方法都是为了实现驱动防滑系统的功能,即通过识别路面状态,针对不同路况采用不同的滑转率控制策略,通过限制驱动轮的驱动转矩使车辆能在不同路面上充分利用附着力,防止车辆在驱动力急剧变化中发生驱动轮相对地面产生过度的滑转,从而使车辆轮胎相对地面的附着力降低。
以上内容仅供参考,建议咨询汽车专业技术人员了解具体的控制方法。
ASR是驱动防滑系统的简称,其作用是防止汽车起步、加速过程中驱动轮打滑,特别是防止汽车在非对称路面或转弯时驱动轮空转,并将滑移率控制在10%—20%范围内。
由于ASR多是通过调节驱动轮的驱动力实现控制的,因而又叫驱动力控制系统,简称TCS,在日本等地还称之为TRC或TRAC。
作用:
ASR的作用是当汽车加速时将滑动控制在一定的范围内,从而防止驱动轮快速滑动。
它的功能一是提高牵引力;二是保持汽车的行驶稳定性。
行驶在易滑的路面上,没有ASR的汽车加速时驱动轮容易打滑;如果是后驱动的车辆容易甩尾,如果是前驱动的车辆容易方向失控。
有ASR时,汽车在加速时就不会有或能够减轻这种现象。
在转弯时,如果发生驱动轮打滑会导致整个车辆向一侧偏移,当有ASR时就会使车辆沿着正确的路线转向。
在装有ASR的车上,从油门踏板到汽油机节气门(柴油机喷油泵操作杆)之间的机械连接被电控油门装置所代替。
当传感器将油门踏板的位置及轮速信号送到单元(CPU)时,控制单元就会产生控制电压信号,伺服电机依此信号重新调整节气门的位置(或者柴油机操纵杆的位置),然后将该位置信号反馈至控制单元,以便及时调整制动器。
简述驱动防滑系统的基本工作原理一、引言驱动防滑系统是现代汽车中的一个重要安全系统,它能够提高车辆在湿滑路面上的行驶稳定性和控制性,降低车辆失控的风险。
本文将从驱动防滑系统的基本工作原理、主要部件和应用场景三个方面进行详细介绍。
二、基本工作原理驱动防滑系统是由传感器、电控单元、液压控制单元和执行机构等组成的。
其基本工作原理如下:1. 传感器检测车轮速度驱动防滑系统中装有轮速传感器,用于检测车轮转速。
当某一车轮发生打滑时,其转速将会快于其他车轮,此时传感器会向电控单元发送信号。
2. 电控单元计算刹车力与牵引力之差接收到传感器发来的信号后,电控单元会根据算法计算出刹车力与牵引力之差。
当这个差值超过一定程度时,就说明某一车轮已经打滑了。
3. 液压控制单元调整刹车压力或牵引力为了避免车轮打滑,液压控制单元会对刹车压力或牵引力进行调整。
当某一车轮发生打滑时,液压控制单元会立即减小该车轮的牵引力或增加其刹车力,以使其恢复正常的行驶状态。
4. 执行机构实现调整液压控制单元通过执行机构来实现牵引力和刹车力的调整。
执行机构通常由电磁阀和液压缸组成,当电磁阀接收到信号后,它会控制液压缸的工作,从而改变刹车或牵引力的大小。
三、主要部件驱动防滑系统包含多个主要部件,下面将逐一进行介绍:1. 轮速传感器轮速传感器是驱动防滑系统中最关键的部件之一。
它能够检测每个车轮的转速,并将检测结果发送给电控单元。
目前市场上常见的轮速传感器有两种类型:磁性传感器和霍尔传感器。
2. 电控单元电控单元是驱动防滑系统中负责计算和处理信号的部件。
它可以根据传感器发来的信号,计算出刹车力和牵引力之间的差值,并向液压控制单元发送指令。
3. 液压控制单元液压控制单元是驱动防滑系统中负责调整刹车力和牵引力的部件。
它可以根据电控单元发来的指令,通过执行机构来实现对刹车或牵引力的调整。
4. 执行机构执行机构是驱动防滑系统中负责实现刹车或牵引力调整的部件。
通常由电磁阀和液压缸组成,当电磁阀接收到信号后,它会控制液压缸的工作,从而改变刹车或牵引力的大小。
课题15.6 驱动防滑(ASR)系统有经验的驾驶员都有这样的体会,当驾驶汽车在低附着系数的路面(例如泥泞或有冰雪的路面)上快速起步或加速行驶时,驱动车轮会发生滑转(俗称车轮“打滑”)。
这种现象是什么原因造成的呢?想一想,我们已经知道了汽车在制动过程中,制动器制力与地面制动力之间的不和谐关系造成了制动车轮的抱死滑移。
而在车轮的驱动过程中,车轮的驱动力与地面所提供的最大附着力之间是否也存在这种不和谐的关系?正是由于存在这种不和谐,使发动机传递给车轮的驱动力大于驱动车轮与地面的附着力时,车轮就会出现滑转的现象。
一、驱动防滑系统的作用驱动防滑系统能在车轮开始滑转时,降低发动机的输出扭矩,同时控制制动系统,以降低传递给驱动车轮的扭矩,使之达到合适的驱动力,使汽车的起步和加速达到快速而稳定的效果。
二、滑转率及其与路面附着系数的关系汽车在驱动过程中,驱动车轮可能相对于路面发生滑转。
滑转成分在车轮纵向运动中所占的比例称为驱动车轮的滑转率,通常用“S A”表示。
S A=(rω—ν)/rω×100%式中:S A—车轮的滑转率;r—车轮的自由滚动半径;ω—车轮的转动角速度;ν—车轮中心的纵向速度。
当车轮在路面上自由滚动时,车轮中心的纵向速度完全是由于车轮滚动产生的。
此时ν= rω,其滑转率S A=0;当车轮在路面上完全滑转(即汽车原地不动,而驱动轮的圆周速度不为0)时,车轮中心的纵向速度ν=0,其滑动率S A=100%;当车轮在路面上一边滚动一边滑转时,0<S A<100%。
与汽车在制动过程中的滑移率相同,在汽车的驱动过程中,车轮与路面间的附着系数的大小随着滑转率的变化而变化。
在干路面或湿路面上,当滑转率在15%~30%范围内时,车轮具有最大的纵向附着系数,此时可产生的地面驱动力最大。
在雪路或冰路面上时,最佳滑移率在20%~50%的范围内;当滑转率为零,即车轮处于纯滚动状态时,其侧向附着系数也最大,此时汽车保持转向和防止侧滑的能力最强。
驱动防滑控制系统名词解释本文主要介绍驱动防滑控制系统 (ASR) 的定义、功能和优点,以及其主要组成部分和工作原理。
下面是本店铺为大家精心编写的3篇《驱动防滑控制系统名词解释》,供大家借鉴与参考,希望对大家有所帮助。
《驱动防滑控制系统名词解释》篇1一、定义驱动防滑控制系统 (Acceleration Slip Regulation,简称 ASR) 是一种辅助驾驶者控制车辆驱动轮滑转的系统,主要用于提高车辆的行驶安全性和性能。
二、功能和优点ASR 的主要功能是在车辆驱动轮滑转时自动调节滑转率,充分利用驱动轮的最大附着力,从而提高车辆的动力性、方向稳定性和前轮驱动汽车的转向控制能力,并减少轮胎磨损和降低发动机油耗。
具体优点如下:1. 提高车辆的动力性:ASR 能够在车辆起步、行驶过程中提供最佳驱动力,尤其是在附着系数较小的路面上,起步、加速性能和爬坡能力良好。
2. 保持车辆的方向稳定性和前轮驱动汽车的转向控制能力:ASR 能够保持车辆的方向稳定性和前轮驱动汽车的转向控制能力,提高车辆的行驶安全性和稳定性。
3. 减少轮胎磨损和降低发动机油耗:ASR 能够减少轮胎磨损和降低发动机油耗,降低车辆的使用成本和环境污染。
三、主要组成部分和工作原理ASR 主要由电子控制节气门的制动装置、点火正时、变速器改变换档定时、调节差速器制动驱动车轮和控制驱动滑转等组成部分组成。
《驱动防滑控制系统名词解释》篇2驱动防滑控制系统是一种汽车控制系统,旨在防止汽车在驱动过程中发生滑转。
它通过电子控制单元(ECU)对车轮转速传感器、制动压力调节器、副节气门和节气门位置传感器等部件进行控制,以调节汽车的牵引力和稳定性,防止驱动轮在加速时打滑。
驱动防滑控制系统可以提高汽车的起步性能、加速性能和在滑溜路面的通过性能,同时保持汽车的行驶稳定性和方向控制能力。
加速驱动轮防滑控制系统是驱动防滑控制系统的一种,它是 Accelerate Slip Regulation 的英文缩写,意思是加速防滑控制。
ASR的中文意思为汽车加速驱动防滑系统。
是在ABS基础上进一步拓展的又一种汽车安全装置,该系统的产生使汽车的安全性能得到进一步提高。
ASR的功能是防止汽车在起步或加速时驱动轮打滑,特别防止汽车在非对称路面或转弯时驱动轮空转及在冰、雪、积水、泥等路况下的行车安全。
其功能须在ABS系统基础上增加相应的软件和部件就可实现,并形成ABS/ASR系统。
ASR的作用是当汽车加速时将滑动率控制在一定的范围内,从而防止驱动轮快速滑动。
它的功能一是提高牵引力;二是保持汽车的行驶稳定。
行驶在易滑的路面上,没有ASR的汽车加速时驱动轮容易打滑;如是后驱动的车辆容易甩尾,如是前驱动的车辆容易方向失控。
有ASR时,汽车在加速时就不会有或能够减轻这种现象。
在转弯时,如果发生驱动轮打滑会导致整个车辆向一侧偏移,当有ASR时就会使车辆沿着正确的路线转向。
汽车的牵引力控制可以通过减少节气门开度来降低发动机功率或者由制动器控制车轮打滑来达到目的,装有ASR的汽车综合这两种方法来工作,也就是ABS/ASR形式。
宝来/高尔夫轿车就是典型的应用代表.装有ASR的车上,从油门踏板到汽油机节气门(柴油机喷油泵操纵杆)之间的机械连接被电子控制油门(E-gas)装置所取替。
当传感器将油门踏板的位置及轮速信号送至发动机控制单元(ECU)时,控制单元就会产生控制电压信号,伺服电机依此信号重新调整节气门的位置(或者柴油机操纵杆的位置),然后将该位置信号反馈至控制单元,以便及时调整制动器.ASR的正确含义与功能是防驱动轮滑转的电子控制系统,或称驱动力控制调节系统。
当汽车在起步、加速或上坡时,驾驶员猛踩油门,驱动轮上的驱动力一旦超过该轮地面附着力的允许极限时,驱动轮将开始滑转——原地打滑;这时,ASR的测速元件会立即将驱动轮滑转信号传送至控制电脑,电脑将立即发出指令信号,即使驾驶员的油门踏板并未收回,发动机的输出功率与扭矩会立即相应降低,从而避免驱动轮滑转。
四轮驱动汽车驱动防滑控制系统的设计摘要驱动防滑控制系统ASR的基础是ABS,是在ABS 为基础上的延伸,ABS 和ASR 统称为防滑控制系统。
驱动防滑控制系统通过调节作用于驱动轮的驱动力矩来控制驱动轮的滑转率,从而使汽车的操纵性、横向稳定性、动力性以及燃油经济性都得到提高。
四轮驱动汽车与二轮驱动汽车相比,因为其每个轮胎所受的驱动力只有二轮驱动汽车的一半,故具有更好的越野性能,然而,四轮驱动汽车本身存在许多不足,比如:短时四轮驱动汽车操作繁琐;常时四轮驱动汽车由于前后驱动桥之间以及左右驱动轮之间通过差速器连接,只要一个车轮处于低附着系数路面上时,整车驱动力几乎丧失。
将驱动防滑控制系统用于四轮驱动汽车将有可能解决四轮驱动汽车打滑的问题。
本文主要从轮胎的滑转以及整车的动力性等方面来分析驱动防滑控制系统对于四轮驱动汽车的影响,主要内容包括以下几个部分:1、分析四轮驱动汽车的驱动特点,制定出四轮驱动汽车驱动防滑控制系统的控制策略。
通过调节发动机的输出扭矩以及控制制动器来控制车轮的相对滑转。
原始输入参考模型车发动机输出数据。
2、建立四轮驱动汽车驱动的简化数学模型。
本文主要为控制算法的研究,故数学模型可适当简化,并将汽车行驶的条件设置为相对简单的路面情况。
3、进行ASR 系统的控制算法研究。
并主要探讨了模糊控制在四轮驱动汽车ASR 系统上的应用。
分别设计了发动机输出扭矩控制器和制动力矩模糊控制器。
4、根据所建立的数学模型在MATLAB/SIMULINK 环境下建立仿真模型,并进行了不同路面上的仿真分析。
仿真结果表明驱动防滑控制系统对于四轮驱动汽车的驱动轮滑转起到了较好的抑制作用,并且使得四轮驱动汽车的动力性得到一定的提高,同时也验证了控制策略的正确性以及控制算法的可行性。
关键词:驱动防滑;四轮驱动;轮胎模型;MATLAB仿真;模糊控制AbstractAcceleration slip regulation (ASR) was developed based on Anti-lock Brake System (ABS). It is the extension of ABS to the driving course. So ABS and ASR are called a control system preventing slide by a joint name. ASR can control the slippages of the driving wheels by adjusting the driving moments acting on the driving wheels. Accordingly improves the handling performance、transverse stability、dynamic performance and economics.Four wheel drive vehicle has better cross-country performance than two wheel drive vehicle. So it usually passes for SUV. However, four wheel drive vehicle has many shortages. To drive a short-time four wheel drive vehicle is very troublesome. Because the front and rare driving bridges of a long-time four wheel drive vehicle are connected through a differential as well as the left and right driving wheels, certain wheel on the road with low coefficient of friction will result in else wheels’ driving power descend much, so th e power to drive the car become almost zero. ASR can possibly solve the four wheel drive vehicle’s problem of slip. So this paper mainly analysis the ASR’s effect on the four-wheel-drive vehicle from the angle of dynamic performance. This paper mainly includes several parts as follows:1. The control strategies were set down by analysis the character of four wheel drive vehicle when driving. That is, the exceed slips of driving wheels are regulated by controlling the gun, and the relative slips of driving wheels are regulated by controlling the brake. The means of estimating the vehicle’s velocity used on the ABS was used for reference.2. The mathematic model of a four wheel drive vehicle was established. Establish a simple 、convenience、obvious、accurate systems mathematic model. In this paper, the model of the system was established and the state-space of the system was deduced.3. Made some researches of the ASR’s control algorithms. Then discuss the application of fuzzy control means on the ASR of four wheel drive vehicle. The gun controller and brake controller were designed.4. The simulation model was established under the circumstance of MATLAB/SIMULINK according to the established mathematic model. And three different road conditions were simulated and analysis. The results of simulation have shown that ASR can effectively regulated the driving wheels’ slippages, furthermore, the dynamic performance be improved. At the same time, it proved the control strategies were correct and the control algorithms were feasible.Keywords: acceleration slip regulation, four wheel drive; bond graph, simulation, fuzzy control目录摘要 (I)Abstract .............................................................................................................. I I第1章绪论 (1)1.1 课题背景及研究的目的和意义 (1)1.1.1 ASR的由来 (1)1.1.2 ASR的发展历程 (2)1.2 四轮驱动汽车的驱动防滑及其相关理论的发展 (4)1.2.1 四轮驱动原理 (4)1.2.2 四驱汽车的驱动防滑 (5)1.3 ASR在我国的现状及本课题研究的内容 (6)1.3.1 ASR在我国的发展现状 (6)1.3.2 ASR研究中的关键技术 (6)1.3.3 本课题的主要研究内容 (7)第2章ASR的基本原理及控制策略的研究 (9)2.1 ASR的基本原理及其基本结构 (9)2.2 四轮驱动汽车的ASR控制策略的研究 (10)2.2.1 控制实现的方法 (10)2.2.2 控制策略的选择 (11)2.2.3 控制量的选择 (13)2.3 模型汽车参数的确定 (13)2.4 本章小结 (14)第3章汽车运动模型建立 (15)3.1 轮胎力学模型 (15)3.2 制动系统模型 (17)3.3 滑转率的计算模型 (17)3.4 驱动力矩的分配模型 (18)3.5 汽车整车模型的建立 (20)3.6 本章小结 (21)第4章模糊控制器的设计 (23)4.1 模糊控制方法 (23)4.1.1 模糊控制的基本思想及模糊系统的构成 (23)4.1.2 模糊控制的基本原理 (24)4.2 模糊控制器的设计 (25)4.2.1 模糊控制器结构的设计 (25)4.2.2 精确量的模糊化 (25)4.2.3 输出信息的模糊判决 (29)4.3 模糊系统的建模 (30)4.4 本章小结 (30)第5章不同路面情况下的仿真及结果分析 (31)5.1 ASR的控制器模型 (31)5.2 仿真以及结果分析 (34)5.2.1 汽车模型的检验 (34)5.2.2 增加了驱动防滑系统的汽车模型 (36)5.2.3 以复杂输入参数进行仿真 (37)5.2.4 ASR控制下的仿真 (39)5.2.5 将路面情况设定为普通路面的仿真 (42)5.3 本章小结 (43)结论 (44)参考文献 (46)第1章绪论1.1 课题背景及研究的目的和意义1.1.1 ASR的由来汽车技术在近一个世纪以来得到了快速的发展和提高,目前,ABS 对于大众来说已经是一个很熟悉的名词了。
汽车驱动防滑系统(ASR)简介
1.ABS/ASR系统
目前,汽车的制动、加速和转向仍是需由驾驶员完成的基本作业。
当路面的附着状况不好或交通状况突然改变时,就要求驾驶员有熟练的驾驶技术来很好地适应行驶条件的变化。
前边所述的制动防抱死系统,在制动方面解脱了对驾驶员的高要求。
驱动防滑控制系统则是在行驶方面、加速方面解脱对驾驶员的高要求。
驱动防滑系统是汽车制动防抱死系统功能的自然扩展,它的作用是维持汽车行驶时的方向稳定性,并尽可能利用车轮―路面间的纵向附着能力,提供最大的驱动力。
当驾驶员在光滑路面上过分踩下油门时,会造成车轮的过分滑转,驱动防滑装置通过自动施加部分制动或减少发动机功率输出的方式可使车轮的滑动率保持在最佳范围内,由此可防止驾驶员过分踩下油门踏板所带来的负效应,获得较好的行驶安全性及良好的起步加速性能。
它的另一优点是可减少轮胎及动力传动系统的磨损。
以市内公共汽车的行驶为例。
若公共汽车停车站右侧是结冰路面,左侧为水泥或沥青路面,这在北方的冬季是常见的路况。
两边的附着能力不同,汽车起步受阻。
如果汽车装备有ASR系统,它可通过制动飞转车轮的
办法来平衡驱动轮的转速差。
这实际上产生的是差速锁效应。
这样一方面提高了驱动力的发挥,可在较大程度上发挥附着较好一侧的附着能力l另?方面防止了差速器行星齿轮的快速转动,避免了差速器的早期磨损。
ASR的这种控制方式称为“制动力控制”。
若公共汽车的两侧附着状况均不好,例如都是结冰路面,当猛踩加速踏板时,由于地面附着能力不足,两侧驱动轮会同时飞转。
在这种情况下,驱动防滑系统通过自动减少发动机功率输出的办法来控制。
发动机输出功率和发动机转速的适度降低,可减少驱动轮的过分滑转,一方面提高了车轮―路面间的侧向附着能力,维持了方向稳定性;另一方面增大了纵向附着能力,有利了起步和加速。
ASR系统的这种控制方式称为“发动机调速控制”。
ASR系统进行制动力控制和发动机调速控制时,仪表盘上的ASR 指示灯就发光。
这样驾驶员就被告知路面的状况,从而可及时采取相应的措施,以改善驱动条件。
ASR系统的这种控制方式称为“光滑路面状况显示控制”。
如果应用气体悬架的汽车在光滑路面上起步或行驶比较困难,可通过ASR控制作用使驱动力获得一定程度的增加,但仍不足以正常行驶,为增加驱动力,改善行驶状况,可通过轴荷转移的方法,增大驱动桥的附着载荷,增大驱动力。
轴荷转移是通过部分释放驱动桥气体悬架中压力气体,造成悬挂质量向驱动桥一边倾斜,整车质心位置的
改变来实现。
压力气体释放的多少取决于驱动轮的滑转程度。
ASR系统这种控制方式称为“轴荷转移控制”。
总的说来,驱动防滑控制包括上述四个方面的内容。
它已成功地应用在厶些高档小汽车、客车和货车工,取得了明显的效果。
由于驱动防滑系统总是和防抱死系统结合在一起应用,通常称为ABS/ASR 系统。
2. ABS/ASR/VDC系统
ABS/ASR系统成功地解决了汽车在制动和驱动时的方向稳定性问题,但不能解决汽车转向行驶时的方向稳定性问题。
例如当汽车转向行驶时,不可避免地受到侧向和纵向力的作用,只有当地面能够提供充分的侧向和纵向力时,驾驶员才能控制住车辆。
如果地面侧向附着能力比较低,就会损害汽车按预定方向行驶的能力。
雨天汽车高速转向行驶时,常常侧向滑出,就是地面侧向附着能力不足的缘故。
为解决此问题,最近汽车工业发达国家又在ABS/ASR系统的基础上发展成汽车动态控制系统(英文名称为Vehicle Dynamics Control,简称VDC)。
这个系统把汽车的制动、驱动、悬架、转向、发动机等各主要总成的控制系统在功能上、结构上有机的综合在一起,可使汽车在各种恶劣工况下,如冰雪路面上、对开路面上、弯道路面上以及采取规避动作移线、制动、加速和下坡等工况行驶时,对不同承载、不同轮胎气压和不同程度的轮胎磨损都有良好的方向稳定性,表现出最
佳的行驶性能。
VDC的应用,在制动、加速和转向方面完全解脱对驾驶员的高要求,在汽车的主动安全行驶方面竖立了一个新的里程碑。
VDC系统对转向行驶的控制主要是借助于对各个车轮的制动控制和发动机功率输出控制来实现的。
例如汽车左转弯时,若前轮因转向能力不足而趋于滑出弯道,VDC系统即可测知侧滑即将发生,就采取适当制动左后轮的办法。
左后轮产生的制动力可帮助汽车转向,使汽车继续按照理想的路线行驶,如图5.3.1所示。
若在同一弯道上,因后轮趋于侧向滑出而转向过多,VDC系统即采取适当制动右前轮的办法,维持车辆的稳定行驶。
在极端情况下,VDC系统还可采取降低发动机功率输出的办法降低行驶车速,减少对地面侧向附着能力的需求来维持车辆的稳定行驶。
采用VDC系统后,汽车在对开路面上或弯道路面上的制动距离还可进一步缩短。
VDC系统主要应用了下述传感器:
车轮转速传感器,用来跟踪每一车轮的运动状态;
方向盘转角传感器,用来传感方向盘的转角;
横摆角速度传感器,用来记录汽车绕垂直轴线转动的所有运动;
侧向加速度传感器,用来检测转向行驶时离心力的大小;
车轮位移传感器,用来测量车轮和车身相对位置的变化。
这些传感器的核心部分是横摆角速度传感器,这是因为汽车的横摆角速度和方向盘转角的比值是反应汽车转向行驶品质的一个重要参数。
位移传感器的信号传给电子控制装置,用来控制半主动悬架,改善汽车的接地性能。
其它传感器则把汽车每一瞬时的运动状态的信
息传给电子控制装置,使之与理想的运动状态相比较,一旦汽车偏离了理想的路线,它就会在极短的时间内采取纠正措施,给制动控制系统或发动机控制系统发出相应的指令,维持汽车在理想的路线上行驶分图5.3.2为美国跳Delphi公司的VIDC系统夜轿车工的布置示意图。