拖拉机自动驾驶变速机构控制器的研制
- 格式:pdf
- 大小:258.66 KB
- 文档页数:5
拖拉机电控机械式自动变速器电控系统设计研究拖拉机电控机械式自动变速器电控系统设计研究摘要:拖拉机是农业机械中的重要组成部分,而自动变速器又是拖拉机的核心部件之一。
本文通过对拖拉机电控机械式自动变速器电控系统进行设计研究,以提升拖拉机的工作效率和操作便利性。
1. 引言随着农业机械化的不断进步,拖拉机作为农业生产中的主力军,其性能和功能要求也不断提高。
自动变速器作为拖拉机传动系统的核心部件,其效率和可靠性直接影响着拖拉机的工作质量和效率。
因此,设计一套高效、可靠的电控机械式自动变速器电控系统对于提升拖拉机的工作效率和操作便利性至关重要。
2. 变速器电控系统的基本原理拖拉机自动变速器电控系统主要由变速器传感器、控制电路、执行机构和显示装置等组成。
其中,变速器传感器通过获取拖拉机车速、油门开度和制动踏板等参数的信号,并将其转化成电信号。
控制电路接收来自传感器的信号,根据预先设定的控制策略,发出指令给执行机构,实现变速器的自动换挡和换程。
显示装置用于显示拖拉机的车速、挡位和工作状态等信息。
3. 系统设计与开发3.1 变速器传感器设计通过安装车速传感器、油门传感器、制动踏板传感器等设备,准确获取拖拉机的车速、油门开度和制动踏板状态等参数,并将其转化成电信号。
传感器的设计要考虑其耐久性和可靠性,以适应恶劣的工作环境。
3.2 控制电路设计控制电路是电控系统的核心部分,其主要功能是接收传感器的信号,并根据预设的控制策略来控制变速器的换挡和换程。
在设计过程中,需要考虑控制电路的稳定性、可靠性和实用性,确保其能够适应各种工作条件和负荷要求。
3.3 执行机构设计执行机构是控制电路的输出部分,主要负责接收电控系统的指令,并通过电动、气动或液压等方式实现变速器的换挡和换程。
执行机构的设计要考虑其快速响应、稳定可靠,以确保变速器能够准确、迅速地实现自动变速。
3.4 显示装置设计显示装置用于显示拖拉机的车速、挡位和工作状态等信息,便于驾驶员实时掌握拖拉机的运行情况。
拖拉机cvt变速箱原理
连续可变变速器(Continuously Variable Transmission,简称CVT)是一种可以在任意转速范围内以任意速度变速的变速器。
拖拉机的CVT变速箱原理如下:
1. 主轴和从轴:CVT变速箱由两根轴组成,分别是主轴和从轴。
主轴连接发动机,从轴连接传动系统。
2. 带轮和轮带:主轴上安装一个可调节的带轮,从轴上安装一个对应的轮带。
带轮和轮带之间通过金属带连接,形成一个V 形传动带。
3. 油泵和控制阀:CVT变速箱配备一个油泵和一组控制阀。
油泵通过齿轮传动将液压油压力增加,并将其输送到控制阀。
4. 主从轴同步:当液压油压力增加时,控制阀会调整带轮和轮带之间的压紧力,从而改变带轮和轮带之间的传动比例。
这样,主轴和从轴之间就可以实现同步转速。
5. 变速效果:通过改变主轴和从轴之间的传动比例,CVT变
速箱可以实现不同速度的输出。
当传动比例降低时,从轴速度增加;当传动比例增加时,从轴速度降低。
这样,拖拉机可以在不同工作条件下实现最佳的转速和扭矩输出。
6. 液力变矩器:CVT变速箱通常还配备有一个液力变矩器,
用于平滑地传输动力到变速箱。
液力变矩器可以通过液体的静压力和动压力来调节扭矩输出,使得拖拉机在启动和低速行驶时更加平稳。
总的来说,CVT变速箱通过调整带轮和轮带之间的压紧力,
实现了主轴和从轴之间的同步转速和任意传动比变化。
这种变速箱在各种工作条件下都能提供最佳的效率和性能输出。
拖拉机自动驾驶及控制技术刘成强;林连华;徐海港【摘要】为实现拖拉机的自动驾驶和智能控制,满足国内大型机具对动力机械的需求,从智能导航、自动驾驶与操控协同、数据采集及监控自检、智能系统集成等方面开展模块化开发,实现了拖拉机自动行走、自动调头、自动避障、路径智能规划以及智能决策等生产作业功能,且能满足拖拉机复合农田作业的需求.【期刊名称】《农业工程》【年(卷),期】2019(009)004【总页数】5页(P87-91)【关键词】拖拉机;智能;控制;协同【作者】刘成强;林连华;徐海港【作者单位】山东时风[集团]有限责任公司,山东聊城252800;山东省主要农作物机械化生产装备协同创新中心,山东青岛266109;农业部农机动力和收获机械重点试验室,山东聊城252800;山东时风[集团]有限责任公司,山东聊城252800;山东省主要农作物机械化生产装备协同创新中心,山东青岛266109;农业部农机动力和收获机械重点试验室,山东聊城252800;山东时风[集团]有限责任公司,山东聊城252800;山东省主要农作物机械化生产装备协同创新中心,山东青岛266109;农业部农机动力和收获机械重点试验室,山东聊城252800【正文语种】中文【中图分类】S2190 引言随着我国农业结构的调整和农产品市场的国际化,农村土地逐步向集约化经营发展,农业生产模式也逐步规模化、大型化,市场对大型拖拉机的需求不断增加,《中国制造2025》对农业装备提出新要求[1]。
十九大提出的实施乡村振兴战略,就是对农民群众美好生活需要最为真切的呼应。
新农村建设、新型农民不仅需要新型农机,更需要智能农机、智慧农场和智慧合作社[2]。
国外农场无人机运维作业和管理模式,倒逼着我国动力机械的结构升级和自动驾驶技术的升级。
凯斯Magnum无人驾驶概念拖拉机在传统拖拉机基础上,通过配合使用GPS和用于超精准导引和实时记录传输现场数据的最精确卫星校正信号,可实现远程配置、监测及操作设备,在展会上展出的国外高端样机价格昂贵,因地制宜地开发适应中国农村特点的、中国国情的自动驾驶及智能控制拖拉机非常必要,智能控制、数据采集和自动协同等关键技术亟需突破,以推进产业升级[3-6]。
基于智能控制技术的拖拉机自动化驾驶系统设计与实现1.摘要农业生产自动化已经成为现代农业的重要发展趋势,拖拉机自动化驾驶系统作为农业生产自动化的核心技术之一,受到越来越多的关注和研究。
本文提出了一种基于智能控制技术的拖拉机自动化驾驶系统设计与实现方案,该方案包括了拖拉机自动导航、自动行驶、自动拖拉等功能,能够有效地提高农业生产效率和农业生产质量。
本文首先介绍了拖拉机自动化驾驶系统的研究背景和意义,然后详细阐述了该系统的设计思路和实现步骤。
该系统采用了传感器、控制器、导航设备等多种硬件设备,以及智能控制算法和机器学习技术等多种软件技术,通过将这些技术进行有机结合,实现了拖拉机自动导航、自动行驶、自动拖拉等多种功能。
在系统实现过程中,本文重点介绍了拖拉机自动导航算法的设计和实现,该算法基于GPS和惯性导航技术,能够高精度地实现拖拉机的自动导航。
此外,本文还介绍了拖拉机自动行驶算法的设计和实现,该算法通过利用机器学习技术,能够智能地控制拖拉机的速度和方向,实现拖拉机的自动行驶。
实验结果表明,本文所提出的基于智能控制技术的拖拉机自动化驾驶系统具有较高的可靠性和稳定性,能够有效地提高农业生产效率和农业生产质量,具有广阔的应用前景和发展空间。
关键词:智能控制技术;拖拉机自动化驾驶系统;自动导航;自动行驶;自动拖拉2.引言农业是国民经济的基础产业之一,而农业生产自动化已成为现代农业的重要发展趋势。
在农业生产中,拖拉机作为重要的农业机械之一,对于提高农业生产效率和农业生产质量具有重要作用。
然而,传统的拖拉机驾驶方式需要农民花费大量时间和精力进行操作,存在人工操作疲劳、生产效率低下等问题,因此,拖拉机自动化驾驶技术的研究和应用具有重要意义。
近年来,随着智能控制技术的不断发展,拖拉机自动化驾驶技术得到了快速发展。
拖拉机自动化驾驶系统可以利用传感器、控制器、导航设备等多种硬件设备,以及智能控制算法和机器学习技术等多种软件技术,实现拖拉机自动导航、自动行驶、自动拖拉等多种功能,大大提高了农业生产效率和农业生产质量。
拖拉机电控机械式自动变速系统设计摘要:近几年来,我国在农业基础设施中投入的力度不断增加,拖拉机等各种农业机械化设备在农业生产中得到广泛的应用。
伴随科学技术不断发展,拖拉机等农业机械设备工作效率也不断提高,但是和国外发达国家依旧存在较大的差距,需要积极开展关于拖拉机电控机械式自动变速系统的研究,以提高我国拖拉机开发与设计水平。
本文介绍了电控机械式自动变速器工作机理以及构成,同时从硬件与软件两个方面详细介绍拖拉机电控机械式自动变速系统设计方法,为拖拉机设计工作提供参考。
关键词:拖拉机;电控机械式;自动变速系统;设计引言如今,我国农业机械化水平不断提升,农业开始从传统农业向现代化农业方向发展。
期间,现代化农业设备发挥了十分重要的作用[1]。
拖拉机是农业生产中必不可少,且应用广泛的机械设备,承担了农业牵引以及运输等多重任务,主要应用在耕种以及施肥等农业作业之中。
拖拉机向自动化对推动农业向机械自动化方向发展产生不可替代的效果。
一、电控机械式自动变速器工作机理及其构成电控机械式自动变速系统是一种TCU经由对应传感器设备,能够有效收集换挡信息数据、加速踏板信息数据等,据此判断驾驶员实际驾驶意图,并经由发动机变速器与离合器等转化收集的信号,以反映车辆当前的运行状态,还可如实反馈油门操作系统以及离合器与变速器的执行系统等信号,将所有信号传输至TCU 予以存储。
当操作者进行起步或是换挡动作,TCU能够下达对应的控制指令,同时对所有执行机构予以合理控制[2]。
拖拉机内安设电控机械式自动变速设备,能够实现拖拉机运行情况与路面情况以及驾驶员意图的智能化选择,并确保发动机变速器与离合器等各类设备可以实现自动化换挡操作。
拖拉机内电控机械式自动变速系统的关键构成部分TCU可以反馈驾驶员的真实意图,同时实现全部信号的传输以及分析。
不仅如此,TCU能够结合所收集的信息数据分析目前车辆的运行状况,包括油门开合程度、发动机转速以及滑转率等。
2021101新能源无人驾驶拖拉机自动变速电控系统设计周云龙(洛阳职业技术学院汽车与轨道交通学院,河南洛阳471666)摘要:新能源纯电动拖拉机是发展环保绿色农业的重要工具,由于电池和电机技术的不成熟,为了提高电动拖拉机整车的动力性能和经济性能,还需要对变速器进行优化设计。
为此,在电动拖拉机的变速器设计上引入了双离合变速器,并设计了自动变速器的电控系统。
为了使电控系统发挥最佳性能,实现无人驾驶功能,提出了模糊神经网络PIN智能控制算法,并对算法的控制性能进行了验证。
仿真测试结果表明:模糊神经网络算法可以明显提高PID算法的控制精度,对于提高自动变速器的控制精度具有重要的作用。
关键词:电动拖拉机;电控系统;模糊控制;神经网络;无人驾驶中图分类号:S219.02文献标识码:A文章编号:1003-188X(2021)10-0264-050引言电动拖拉机以可再生清洁的电能为动力,克服了传统内燃机拖拉机对农业作业环境的污染,节省了能源。
电动拖拉机牵引电机相对传统内燃机具有较宽的工作范围,且电机低速时恒转矩和高速时恒功率的特性更适合车辆运行需求。
然而,固定速比减速器仅有1个挡位,使得电动拖拉机电机常处在低效率区域,浪费了宝贵的电池能量而使续驶里程减少。
为使电动拖拉机发挥其优越性,并降低电动拖拉机对动力电池和牵引电机的要求,可以采用双离合自动变速器。
如果再引入智能化控制算法,还可以实现电动拖拉机的无人驾驶功能,进而提高拖拉机的作业效率和自动化水平。
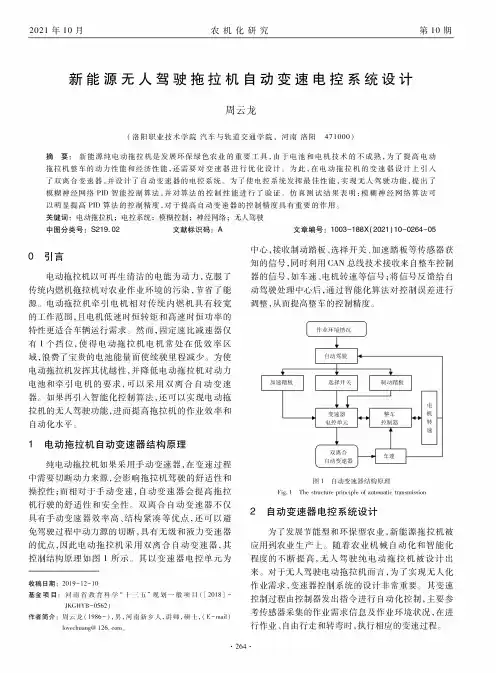
1电动拖拉机自动变速器结构原理纯电动拖拉机如果采用手动变速器,在变速过程中需要切断动力来源,会影响拖拉机驾驶的舒适性和操控性;而相对于手动变速,自动变速器会提高拖拉机行驶的舒适性和安全性。
双离合自动变速器不仅具有手动变速器效率高、结构紧凑等优点,还可以避免驾驶过程中动力源的切断,具有无级和液力变速器的优点,因此电动拖拉机采用双离合自动变速器,其控制结构原理如图1所示。
大型拖拉机动力换挡、无级变速器研发生产方案一、实施背景随着农业技术的不断发展和进步,大型拖拉机在农业生产中扮演着越来越重要的角色。
然而,现有的大型拖拉机在动力传输和变速方面仍存在一定的局限性,影响了农业生产效率。
为了满足市场需求,提高农业生产力,我们计划研发生产具有动力换挡和无级变速功能的大型拖拉机。
二、工作原理1.动力换挡:通过引入液压传动系统,实现动力的平稳切换。
在换挡过程中,液压系统将根据发动机转速和负载状态,自动调整液压压力,实现动力的无隙传输。
2.无级变速:通过引入CVT(无级变速器),实现发动机转速与车轮转速的连续可调。
CVT能够根据田间作业需求,自动调整发动机转速,以获得最佳的动力输出。
三、实施计划步骤1.需求调研:深入了解农业生产过程中对大型拖拉机的实际需求,收集用户反馈和建议。
2.技术研究:开展动力换挡和无级变速器相关技术的理论研究,进行技术可行性分析。
3.方案设计:根据调研结果和技术研究,设计大型拖拉机动力换挡、无级变速器的具体方案。
4.样品制作与测试:按照设计方案制作样品,并进行实地测试,收集使用反馈,对产品进行持续改进。
5.批量生产:经过样品测试和改进后,开始批量生产。
四、适用范围本产品适用于各种类型的农田作业,包括耕作、播种、收割等。
通过与现有农业机械的集成,可大幅提高农业生产效率。
五、创新要点1.引入液压传动系统,实现动力的平稳切换,提高换挡舒适性。
2.采用CVT无级变速技术,实现发动机转速与车轮转速的连续可调,提高作业效率。
3.将动力换挡与无级变速器相结合,为大型拖拉机提供更加高效、智能的动力传输解决方案。
六、预期效果1.提高农业生产效率:通过优化动力传输和变速性能,使大型拖拉机更加适应农业生产环境,提高作业效率。
2.降低油耗:CVT无级变速器能够更好地匹配发动机转速与车轮转速,从而降低油耗。
3.提高驾驶舒适性:通过引入液压传动系统和CVT无级变速技术,提高换挡舒适性和驾驶稳定性。
机电信息工程拖拉机电控机械式\动变速系统设计邵楠鑫(齐齐哈尔工程学院,黑龙江齐齐哈尔161005)摘要:近年来,随着我国对农业基础设施投入力度的不断加大,拖拉机等农业机械化设备在农业发展进程中发挥的作用越发突出。
由于我国科学技术水平在不断提升,拖拉机等农业生产机械设备的生产制造水平也在逐渐提升。
但是在实际生产和应用过程中,拖拉机等国产农业机械设备在传动方面与国外先进国家相比还存在一定的差距,所以,必须要对拖拉机的电控机械式自动变速系统等进行相应地设计和研究,确保能够提高和改善我国拖拉机的开发设计水平,进而使我国农业经济发展更加快速。
关键词:拖拉机;电控机械式自动变速系统;设计1电控机械式自动变速器的工作原理及组成电控机械式自动变速器是由TCU通过相应的传感器设置,可以对换挡信息、加速踏板彳息以及制动信息等进行相应地获取和收集,从而反映出驾驶员的具体驾驶意图,同时还可以通过发动机变速器和离合器等将采集到的信号进行转换,进而保证能够明确车辆的具体运行状态,同时还可以结合油门操作系统、离合器执行系统以及变速器的执行系统等进行信号的反馈,再将所有的信号传输到TCU中进行储存)在拖拉机起步和换挡的过程中,TCU可以实现相应的控制,并且对每一个不同的执行机构进行合理地控制,从而保证车辆在起步和换挡时能够实现各种不同的操作。
在拖拉机中安装电控机械式自动变速器,可以实现拖拉机运行状况以及路面状况和驾驶员意图的自动化选择,同时还可以保证发动机变速器及离合器等不同的设备能够完成自动换挡操作。
拖拉机中的电控机械式自动变速系统的主要组成是TCU用来反映驾驶员的具体意图,并且把所有的信号进行传输和处理。
其次是可以对运行状况进行分析。
同时还包含了油门开度、发动机转速、车速以及滑转率等。
根据对离线数据的储存控制规律,可以在TCU中做出相应的处理,然后通过不同的执行机构对拖拉机的运行情况进行相应地控制和意图的执行。
拖拉机电控机械式自动变速系统主要包含4作者简介:邵楠鑫(1999-),女,苗族,贵州铜仁人,本科,研究方向:机械设计制造及其自动化。
拖拉机自动驾驶变速机构控制器的研制全部作者:祝仕平毛恩荣第1作者单位:中国农业大学论文摘要:本文简要介绍了国内外拖拉机自动驾驶技术的研究现状,论述了拖拉机自动驾驶系统的关键技术、拖拉机自动驾驶变速系统的组成部分以及变速机构控制器的控制对象。
针对铁牛654拖拉机,提出了变速机构控制器的系统结构、控制原理以及软件设计方案。
关键词:拖拉机自动驾驶,变速机构控制器,ARM (浏览全文)发表日期:2006年05月23日同行评议:1)本论文在文字表达上能做到简练清楚。
2)本论文的题目是“…的研制”,但从内容上看,正像摘要中所说的是关于拖拉机自动驾驶仪变速机构控制器的系统结构、控制原理以及软件流程的设计方案,只有“研”,没有“制”。
3)由于只有思路,连基本的系统仿真实验都没有,所以文中所提方案的可行性是1个问号。
如果所提方案没有实际应用价值,或在系统仿真过程中对所提方案要不断进行修正与补充,那么本文目前所给出的方案对他人就没有有益的参考价值。
4)由于文中对所提方案没有与现已有方案的对比,所以看不出所给方案的优越性。
5)英文摘要中时态不1致。
总而言之,本论文属于阶段性研究成果,就目前的内容来看,因没有任何具体参数以及实验数据,看不出所给方案的理论以及实际应用价值。
建议继续研究。
综合评价:修改稿:注:同行评议是由特聘的同行专家给出的评审意见,综合评价是综合专家对论文各要素的评议得出的数值,以1至5颗星显示。
1)本论文在文字表达上能做到简练清楚。
2)本论文的题目是“…的研制”,但从内容上看,正像摘要中所说的是关于拖拉机自动驾驶仪变速机构控制器的系统结构、控制原理以及软件流程的设计方案,只有“研”,没有“制”。
3)由于只有思路,连基本的系统仿真实验都没有,所以文中所提方案的可行性是1个问号。
如果所提方案没有实际应用价值,或在系统仿真过程中对所提方案要不断进行修正与补充,那么本文目前所给出的方案对他人就没有有益的参考价值。
2020年电控智能化拖拉机变速系统研发项目实施方案为做好2020年农机新机具新技术研发项目工作,根据河北省农业农村厅关于印发《河北省2020年中央和省级财政部分提前下达农业转移支付项目实施方案》(冀农财发〔2020〕1号)的通知精神,结合馆陶实际制定本实施方案。
一、项目概况依据《河北省农业机械化管理局关于印发2020年河北省农机项目申报指南的通知》(冀农机管发〔2019〕79号)要求,围绕现代农业发展需求,以智能、高效、绿色、特色农机新机具新技术为重点,项目自主研发的五轴传动布置湿式离合器、整体式湿式离合器缸体结构以及电液智能控制技术,可以填补国内自主知识产权大马力电控智能化拖拉机的工业化生产的空白,加快我国农机产业转型升级,产品性能高,省时节油,污染物的排放量将减少,社会效益显著。
二、任务目标项目形成样机,经相应权威机构检测并取得检测报告,申报国家专利1项以上,发表论文2篇以上,研究制定出相关技术规程或标准,项目建设周期两年。
三、项目承担主体及补助资金依据河北省农业机械化管理局《关于印发2020年河北省农机项目申报指南》(冀农机管发〔2019〕79号)的通知要求,经县级组织企业自主申报,市级农机主管部门推荐,省级农机主管部门评估遴选,经有关程序后批准立项,省级财政依据立项结果下达资金,确定河北铠特农业机械有限公司承担的《电控智能化拖拉机变速系统》项目为省级财政资金支持项目。
补助河北铠特农业机械有限公司资金50万元、项目补助资金通过财政专项转移支付下达,按照国库集中支付有关规定和分类管理的要求,及时拨付给项目承担单位。
四、资金支持方向和关键环节(一)资金支持方向:项目资金用于支持项目承担企业开展新机具新技术研发工作。
(二)资金补助范围:主要包括在项目研究开发过程中发生的设备费、材料费、测试化验加工费、燃料动力费、差旅费、会议费、出版/文献/信息传播/知识产权事务费、劳务费、专家咨询费等。
1、设备费:是指在项目研究开发过程中购置或试制专用仪器设备,对现有仪器设备进行升级改造,以及租赁外单位仪器设备而发生的费用。
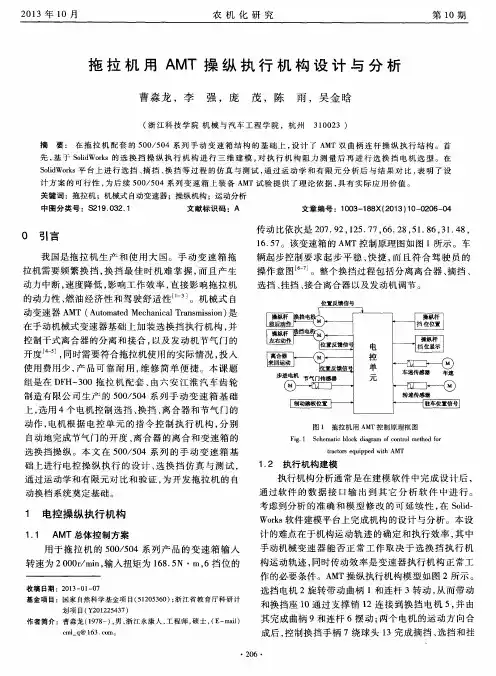
拖拉机驾驶模拟器变速操纵机构的设计常传义;胡军;付强;肖跃进;宋玉洁;郭建永【期刊名称】《农机化研究》【年(卷),期】2018(040)001【摘要】拖拉机驾驶模拟器是一种能正确模拟拖拉机驾驶操作,并在功能上产生与实车相同体感的仿真培训设备.拖拉机驾驶模拟器主要由机械装置、数据采集系统、软件部分及显示设备组成,其中变速操纵机构是机械装置的重要组成部分.为此,提出了拖拉机驾驶模拟器变速机构的功能要求,设计了变速操纵机构和传感器,实现了拖拉机驾驶模拟器变速操纵机构的应用.%Tractor driving simulator is a kind of teaching equipment which can simulate tractor driving operation, and the feeling of learner can accord with tractor driving, it consists of machinery device, data acquisition system, software and display equipment etc.Speed change control system is one of importance parts among them.The author puts forward the functional requirement of tractor driving simulator shift gear, the variable speed control mechanisms and sensors are designed, implements the tractor driving simulator application of variable speed control mechanisms.【总页数】6页(P241-246)【作者】常传义;胡军;付强;肖跃进;宋玉洁;郭建永【作者单位】黑龙江八一农垦大学工程学院,黑龙江大庆 163319;黑龙江八一农垦大学工程学院,黑龙江大庆 163319;黑龙江八一农垦大学工程学院,黑龙江大庆163319;黑龙江八一农垦大学工程学院,黑龙江大庆 163319;黑龙江八一农垦大学工程学院,黑龙江大庆 163319;黑龙江八一农垦大学工程学院,黑龙江大庆163319【正文语种】中文【中图分类】S219【相关文献】1.汽车驾驶模拟器变速操纵机构的设计 [J], 皮胜文;袁焕;尹念东2.拖拉机驾驶模拟器转向灯电路设计 [J], 常传义3.江苏牌50型拖拉机离合联锁操纵机构优化设计 [J], 胡亚东;史云芳4.轮式拖拉机侧置变速操纵机构设计 [J], 蔡鲁锋;郭付友;朱文娟;曹艳花;雒安5.拖拉机离合器操纵机构分离杠杆的有限元分析与设计 [J], 高喆;刘世谦;李俊龙;禹朝帅;姜子刚因版权原因,仅展示原文概要,查看原文内容请购买。
拖拉机自动驾驶变速机构控制器的研制1
祝仕平,毛恩荣
中国农业大学 100083
E-mail:lusonly@
摘要:本文简要介绍了国内外拖拉机自动驾驶技术的研究现状,论述了拖拉机自动驾驶系统的关键技术、拖拉机自动驾驶变速系统的组成部分以及变速机构控制器的控制对象。
针对铁牛654拖拉机,提出了变速机构控制器的系统结构、控制原理以及软件设计方案。
关键词:拖拉机自动驾驶,变速机构控制器,ARM
1 引言
随着计算机技术、全球卫星定位技术、地理信息技术的发展以及精细农业的兴起,国内外许多研究机构开始围绕拖拉机自动驾驶技术展开研究工作。
国外在农用车辆自动驾驶方面的研究进行得较早,20世纪70年代,世界各国许多工程师都对农田机械的自动导航进行了研究【1】。
20世纪80年代末以来,随着传感器性能和性价比不断地提高,工程师们又研究出以机器视觉传感器和全球定位为核心的农田机械自动导航系统。
1999年,法国雷诺拖拉机公司与法国Cemagref研究中心和法国巴斯卡尔(Pascal)大学电子自动化科研实验室合作,经过两年多的研制和实验,研制成功首台通过GPS操作的无人驾驶(自动)农用拖拉机。
GPS 系统以及用于定位的传感器的最新发展,使农用拖拉机无人驾驶的研究出现繁荣景象,美国、日本、英国、丹麦、德国以及荷兰等国开始围绕拖拉机自动驾驶展开研究,并取得了一些成果【2】【3】【4】。
在国内,针对拖拉机自动驾驶的研究较少,目前主要有:南京农业大学、西安交通科技大学对拖拉机视觉导航的研究以及中国农业大学对触觉式秸秆导向的研究【5】【6】。
拖拉机自动驾驶系统主要包括导航控制、路径规划、自动转向、自动变速等关键技术。
其中,自动变速系统的ECU控制对象除了自动变速器中的选档机构、换档机构、离合机构,还包括油门机构、制动机构。
本文所研究的变速控制器控制对象为制动机构、离合机构、油门机构,旨在实现拖拉机自动起步、加速、恒速、减速以及停车等功能。
2 系统结构
本项研究采用AMR7系列LPC2292芯片作为控制器ECU【7】【8】,如图1所示,控制器主要分为以下四个模块:
⑴A/D采集模块
对车速传感器、制动压力传感器、离合位置传感器的信号进行A/D转换和数据采集。
⑵GPIO输出模块
1本科题资金来源:“中国农业大学211工程”重点学科建设项目。
-1-
通过GPIO输出控制继电器的导通和截止,控制离合和制动系统中的电磁换向阀。
⑶PWM输出模块
通过单边沿PWM输出,控制步进电机驱动器,驱动油门步进电机。
⑷CAN通讯模块
通过CAN总线与上位机进行通讯,接收上位机的目标控制信号。
图1 控制器系统结构图
3 控制原理
3.1 制动器控制
铁牛654上的制动器为盘式制动器,因此对制动器进行压力控制就可实现制动控制,其控制原理图如图2所示。
其中,ECU接收制动压力传感器的反馈信号,与制动目标压力进行比较,得到制动器加压(减压)信号,从而通过继电器控制进油阀(放油阀)打开和放油阀(进油阀)关闭。
图2 制动器控制原理图
3.2 离合器控制
⑴分离过程:迅速分离
⑵接合过程:快速动作至开始结合位置-慢速接合-自由行程快速复位。
图3 离合器控制原理图
由此可知,对离合器的控制可通过位置传感器反馈实现不同位置的不同接合速度,其控制原理图如图3所示。
其中,ECU接收离合器位置传感器的反馈信息,通过继电器控制电
-2-
磁阀的通断,改变流量,实现离合缸的阶段性速度变化。
3.3 油门控制
当拖拉机在固定档位行驶时,主要通过油门控制来保持发动机的转速恒定,从而保持车辆行驶速度恒定,如图4所示。
其中,ECU接收发动机转速传感器的反馈信号,通过步进电机驱动器驱动步进电机,调节油门开度,从而控制发动机转速稳定在所需转速,实现车辆以目标速度行驶。
图4 油门控制原理图
4 控制系统软件设计
本项研究中软件编程语言为标准C语言,以模块化思想进行程序设计,程序模块主要包括主程序模块、制动器控制模块、离合器控制模块、油门控制模块、目标信号CAN通讯模块以及传感器信号AD采集模块。
4.1 制动器控制
该模块通过调用CAN通讯模块接收上位机的制动器目标压力信号,并对目标压力进行合理性判断和处理,调用AD采集模块采集制动器当前压力,将目标压力和当前压力相减得到相对压力,通过相对压力的误差允许和正负判断,控制制动执行机构调节制动压力,并通过主程序的循环调用,实现对制动器制动压力的闭环控制。
制动器控制子程序流程图如图5所示。
4.2 离合器控制
该模块通过调用CAN通讯模块接收上位机的离合器目标位置信号(0代表接合,1代表分离),调用AD采集模块采集离合器当前位置,进行目标位置判断,选择分离(或接合),通过当前位置与标定的彻底分离位置(或与标定的开始接合位置和完全接合位置)比较判断,控制离合执行机构的运动速度和位置,并通过主程序的循环调用,实现对离合器执行机构位置的闭环控制。
离合器控制子程序流程图如图6所示。
-3-
图5 制动器控制流程图
图6 离合器控制流程图
4.3 油门控制
该模块通过调用CAN通讯模块接收上位机的发动机目标转速信号,并对目标转速进行合理性判断和处理,通过调用AD采集模块得到发动机当前转速,将目标转速和当前转速相减得到相对转速,通过对相对转速的绝对值的误差允许判断,控制PWM的输出(或者停止输出),并通过相对转速的正负判断,控制步进电机驱动器的DIR电平高或低,控制步进电机正转或反转,调节油门开度,通过主程序的循环调用,实现对发动机转速的闭环控制。
油门控制子程序流程图如图7所示。
图7 油门控制流程图
5 结语
本文针对铁牛654拖拉机,论述了拖拉机自动驾驶变速系统的组成部分,进行了变速机构控制器模块划分,提出了变速机构控制器的系统结构以及离合器、制动器和油门机构的控
-4-
制原理和软件设计方案。
该变速机构控制器实现了拖拉机离合、制动和油门机构的独立自适应控制,控制软件采用模块化设计思想,可以方便的移植和扩展,并为拖拉机自动驾驶变速系统的进一步研究预留了充足的ECU硬件资源。
其研究方法和控制方案可为国内同类研究提供借鉴。
参考文献
[1] R.Keicher,H.Seufert.Automatic guidance for agricultural vehicle in Europe[J].Computers and electronics in
agriculture.2000(25) .
[2] 清分./tljqb/QB203.htm.2004/10/3.
[3] 王路.国外农机智能化发展现状.国外农机.2004.(2):35.
[4] 张伟.农业发展的新课题——精确农业[J ]. 农业工程学报.1997.13 (3) : 249~ 252.
[5] 汪懋华.精细农业发展与工程技术创新[J ].农业工程学报.1999.15 (1) : 1~ 818.
[6] 周俊,姬长英.刘成良.农用轮式移动机器人视觉导航系统[J].农业机械学报.2005.35(3):90~94.
[7] 周立功等编著.ARM与嵌入式系统基础教程.北京:北京航空航天大学出版社.2004
[8] 周立功等编著.ARM与嵌入式系统实验教程(一). 北京: 北京航空航天大学出版社.2004
R&D of shift operator controller for automatic driving
system of tractor
Zhu Shiping,Mao Enrong
China Agricultural University 100083
Email:lusonly@
Abstract
In this paper a brief introduce has been done on study actuality for tractor automatic driving technique. Also, key techniques, makeup of shift system for automatic driving system of tractor and objects of shift operator controller have been discussed. Finally, system structure, manipulative principle and designing project of software were proposed on Tieniu 654L tractor.
Keywords:Tractor automatic driving, Shift operator controller, ARM
作者简介:
祝仕平(1982—),男(汉),浙江诸暨,硕士在读,研究方向:车辆机电控制与智能化。
通讯地址:中国农业大学东区586#信箱,100083,E-mail:lusonly@;
毛恩荣(1961—),男(汉),山西运城,教授,博士生导师,研究方向:车辆机电控制与智能化、车辆动力学、人机工程。
Email:gxy15@。
-5-。