拖拉机自动驾驶监控系统软件设计
- 格式:pdf
- 大小:370.37 KB
- 文档页数:4
智慧农业监控系统制作教程设计方案智慧农业监控系统是一种利用物联网、云计算、大数据等信息技术手段,实现对农田环境、作物生长、农业设施等实时监控和管理的系统。
一、系统架构设计智慧农业监控系统的设计可以分为三个层次:传感器层、网络层、应用层。
1. 传感器层传感器层是监测农田环境、作物生长等信息的基础,包括温度传感器、湿度传感器、光照传感器、土壤湿度传感器等。
传感器通过实时采集环境参数,并将数据发送到网络层。
2. 网络层网络层是数据传输和处理的核心,通过物联网技术将传感器采集的数据传输到云服务器。
网络层可以采用无线传输技术,如WiFi、LoRa等,实现远程监控和管理。
3. 应用层应用层是智慧农业监控系统的用户界面,通过Web或移动应用提供农田环境、作物生长等实时监控和管理功能。
用户可以通过应用层查看农田各项指标的数据,并进行农作物种植、施肥、灌溉等农业管理操作。
二、系统实现步骤1. 选择传感器根据农田环境和农作物的需要,选择合适的传感器,如温度传感器、湿度传感器、光照传感器、土壤湿度传感器等。
注意传感器的精度和稳定性。
2. 搭建传感器网络将传感器连接到微控制器,通过无线通信模块将传感器数据发送到云服务器。
可以选择现有的无线通信技术,如WiFi、LoRa等。
3. 搭建云服务器搭建云服务器,用于接收和处理传感器数据。
可以选择云计算服务提供商,如AWS、阿里云等。
在云服务器上编写数据处理和存储的程序。
4. 开发应用层开发Web或移动应用,实现农田环境、作物生长等实时监控和管理功能。
通过调用云服务器接口,获取传感器数据,并进行展示和操作。
5. 系统整体测试和优化完成系统搭建后,进行整体测试,验证系统是否正常运行,并进行优化。
可以根据测试结果,对系统各个模块进行优化和改进。
三、安全性和可靠性考虑1. 数据安全保护传感器数据的安全,防止数据泄露和篡改。
可以采用加密技术对传感器数据进行加密传输,并在云服务器上设置安全认证机制。
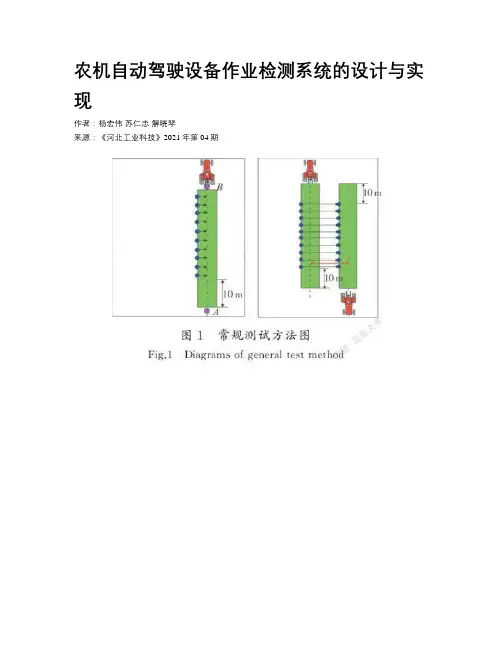
农机自动驾驶设备作业检测系统的设计与实现作者:杨宏伟苏仁忠解晓琴来源:《河北工业科技》2021年第04期摘要:为了满足精准农业领域对农机自动驾驶系统作业进行性能评估和质量管控的需求,解决常规人工测量中误差大、不确定度高的难题,设计一种在真实作业环境中使用的高精度检测系统,使用组合导航系统为核心组件搭建硬件采集设备,运用动态后处理技术(PPK)对观测数据进行深耦合处理,并开发基于JavaScript的自动化评估软件,实现检测过程中的人机交互、数据提取、地图直观显示和结果统计。
选择不同型号的样机在硬化场地和农田熟地进行试验,结果表明:系统采集的作业数据连续、稳定,耦合处理的精度较高,能够直观准确地评估农机自动驾驶设备的作业性能。
系统可应用于北斗农机辅助自动驾驶设备的作业评价和质量鉴定,有助于推动国家农机购置补贴和质量认证政策的落地。
关键词:卫星导航;精准农业;自动驾驶;作业性能;检测系统;PPK中图分类号:TN966文献标识码:ADOI: 10.7535/hbgykj.2021yx04004Design and implementation of operation performance detection systemfor agricultural machinery automatic driving equipmentYANG Hongwei1,SU Renzhong2,XIE Xiaoqin 1(1.The 54th Research Institute of CETC, Shijiazhuang,Hebei 050081, China;2.Hubei Agricultural Mechanization Technology Extension Station, Wuhan, Hubei 430017, China)Abstract:In order to satisfy the requirements of the operating-performance evaluation and the quality control for automatic driving of agricultural machinery in precision agriculture, and to solvethe problems of high error and uncertainty in the usual manual measurements,a high precision detection system used in real working environment was designed and the integrated navigation system was used as the core component to set up the hardware acquisition instrument.The dynamic post processing kinetic (PPK) method was applied to process the observed deeply-coupled data and the automated assessment software was developed based on JavaScript to realize human-computer interaction, data extraction, map visualization and result statistics in the detection process. Finally, different types of prototypes were tested in hardening sites and farmland.The results show that the operating data acquired by the system is continuous and stable. Furthermore, the coupling-processing method has a high precision, which can directly and accurately evaluate the operating performance of the agricultural machinery automatic driving equipment.The system can be applied to the operation evaluation and quality appraisal of Beidou agricultural machinery satellite navigation auxiliary automatic driving systems, which can help to realize the policies of national agricultural machinery purchase subsidies and quality certification.Keywords:satellite navigation; precision agriculture; autonomous driving; operating performance; detection system; PPK中國是农业大国,传统的农业机械受限于人工操作,劳动强度大,作业质量完全依赖于驾驶人员的技能,野外夜间作业基本无法实现。
智慧农机生产系统设计设计方案智慧农机生产系统设计方案一、引言随着科技的不断发展和智能化的快速进步,农业也需要适应时代的发展趋势,推动农机生产向智慧化、自动化方向发展。
智慧农机生产系统是应运而生的一种方案,旨在提高农机生产的效率、降低生产成本,提供更好的农产品质量,为现代农业发展做出贡献。
二、系统概述智慧农机生产系统由硬件设备、软件系统和远程监控系统组成。
硬件设备包括农机和传感器等,软件系统实现对农机的智能控制和管理,远程监控系统可以实现对农机的实时监控和远程操作。
三、系统功能1. 智能控制功能:通过软件系统对农机进行智能控制,包括自动驾驶、自动操纵、作业路径规划等功能。
2. 监测功能:通过传感器监测农田环境、土壤水分、温度等参数,实时获取农田信息,为农机作业提供依据。
3. 作业管理功能:通过软件系统对农机的作业进行管理,包括作业计划、作业记录、作业数据分析等功能。
4. 故障诊断功能:通过传感器对农机进行实时监测,及时发现故障并进行诊断,提供故障处理建议。
5. 远程监控功能:通过远程监控系统实现对农机的实时监控和远程操作,可以随时了解农机的工作状态和位置。
四、系统设计1. 硬件设备设计:采用现代化的农机设备,配备各种传感器,如GPS定位传感器、温湿度传感器、土壤水分传感器等。
2. 软件系统设计:设计一个集中管理的软件系统,包括作业控制、作业计划、作业记录和作业数据分析等功能。
3. 远程监控系统设计:设计一个可以实时监控农机工作状态和位置的远程监控系统,可以通过手机或电脑随时监控农机。
4. 数据分析和决策支持系统设计:通过数据分析和决策支持系统,对农机作业数据进行分析,提供决策支持和优化建议。
五、系统优势1. 提高生产效率:智慧农机生产系统可以实现农机的自动化作业和智能控制,提高农机作业效率,减少人力成本。
2. 降低生产成本:智慧农机生产系统可以根据实际农田环境和需求进行智能作业计划,减少农药和化肥的使用,降低生产成本。


基于 WinCE 的农机导航监控终端软件系统设计与实验张亚娇;张智刚;罗锡文;单鹏辉【期刊名称】《农机化研究》【年(卷),期】2016(0)1【摘要】Intelligent navigation monitoring terminal is an important component of automatic navigation technology system for agricultural machinery.In order to meet the needs of agricultural informationization development,and real-time moni-tor and control the agricultural machinery operation, the navigation monitoring software for agricultural vehicle is devel-oped.The navigation state of the agricultural vehicle can be monitored, controlled, and the fault can be diagnosed with the intelligent monitoring terminal.According to the feature of field work, the automatic navigation monitoring terminal software is designed based on WinCE with embedded touching screen technology.The navigation monitoring terminal soft-ware included the following modules : man-machine interaction interface, serial port communication module with RS232, measure control module, path planning module, file read and write module.Besides, data communication proto-col between navigation monitoring terminal and navigation controller is formulated.The actual test result showed that nav-igation monitoring terminal software system could realize the operation and monitoring of the navigation system for agricul-tural vehicle.%随着农业机械自动导航技术的发展,农机导航监控终端技术已经成为农业机械自动导航技术的重要组成部分。
基于智能控制技术的拖拉机自动化驾驶系统设计与实现1.摘要农业生产自动化已经成为现代农业的重要发展趋势,拖拉机自动化驾驶系统作为农业生产自动化的核心技术之一,受到越来越多的关注和研究。
本文提出了一种基于智能控制技术的拖拉机自动化驾驶系统设计与实现方案,该方案包括了拖拉机自动导航、自动行驶、自动拖拉等功能,能够有效地提高农业生产效率和农业生产质量。
本文首先介绍了拖拉机自动化驾驶系统的研究背景和意义,然后详细阐述了该系统的设计思路和实现步骤。
该系统采用了传感器、控制器、导航设备等多种硬件设备,以及智能控制算法和机器学习技术等多种软件技术,通过将这些技术进行有机结合,实现了拖拉机自动导航、自动行驶、自动拖拉等多种功能。
在系统实现过程中,本文重点介绍了拖拉机自动导航算法的设计和实现,该算法基于GPS和惯性导航技术,能够高精度地实现拖拉机的自动导航。
此外,本文还介绍了拖拉机自动行驶算法的设计和实现,该算法通过利用机器学习技术,能够智能地控制拖拉机的速度和方向,实现拖拉机的自动行驶。
实验结果表明,本文所提出的基于智能控制技术的拖拉机自动化驾驶系统具有较高的可靠性和稳定性,能够有效地提高农业生产效率和农业生产质量,具有广阔的应用前景和发展空间。
关键词:智能控制技术;拖拉机自动化驾驶系统;自动导航;自动行驶;自动拖拉2.引言农业是国民经济的基础产业之一,而农业生产自动化已成为现代农业的重要发展趋势。
在农业生产中,拖拉机作为重要的农业机械之一,对于提高农业生产效率和农业生产质量具有重要作用。
然而,传统的拖拉机驾驶方式需要农民花费大量时间和精力进行操作,存在人工操作疲劳、生产效率低下等问题,因此,拖拉机自动化驾驶技术的研究和应用具有重要意义。
近年来,随着智能控制技术的不断发展,拖拉机自动化驾驶技术得到了快速发展。
拖拉机自动化驾驶系统可以利用传感器、控制器、导航设备等多种硬件设备,以及智能控制算法和机器学习技术等多种软件技术,实现拖拉机自动导航、自动行驶、自动拖拉等多种功能,大大提高了农业生产效率和农业生产质量。
无人驾驶拖拉机田间运行轨迹跟踪控制系统设计目录1. 内容概述 (2)1.1 研究背景 (3)1.2 研究目的和意义 (3)1.3 文献综述 (5)1.4 创新点与研究思路 (6)2. 拖拉机田间运行轨迹跟踪控制系统整体架构设计 (7)2.1 系统总体结构 (9)2.2 数据采集与处理系统设计 (11)2.2.1 GPS卫星定位模块 (12)2.2.2 传感器模块 (13)2.2.3 数据采集器的构建与设计 (14)2.3 导航控制单元设计 (15)2.3.1 控制系统硬件设计 (17)2.3.2 控制器软件设计 (18)3. 路径规划与轨迹控制算法设计 (20)3.1 路径规划算法设计 (21)3.2 轨迹控制算法设计 (23)4. 该系统关键技术难点与保障措施 (25)4.1 定位精度问题及解决方法 (26)4.2 田间环境对系统性能的影响分析与对策 (28)4.3 设备自动化水平不足及提高方案 (29)5. 仿真实验分析与验证 (31)5.1 仿真实验设计与设置 (32)5.2 运行轨迹模拟结果 (34)6. 测试实验与结果分析 (36)6.1 测试实验设计及预期目标 (37)6.2 田间测试实验与结果 (39)7. 结论与展望 (41)7.1 主要结论 (42)7.2 研究展望 (43)1. 内容概述本设计旨在开发一套用于无人驾驶拖拉机田间运行轨迹跟踪的控制系统,该系统将通过先进的传感器技术、路径规划算法和实时控制策略实现对农地的有效管理和作业自动化。
系统的主要目标是提高农业生产的效率和质量,减少人力成本,同时保证作业的安全性和准确性。
系统设计将考虑无人驾驶拖拉机的运动学模型,结合GPS、激光雷达(LIDAR)、摄像头等多种传感器数据,进行实时轨迹跟踪与修正。
还将会集成环境感知功能,比如土壤湿度、作物生长状况等数据,以辅助作业决策。
路径规划模块:基于GNSS和地图数据,为拖拉机规划最优作业路径。
拖拉机驾驶室实时信息管理系统的界面设计周伟伟;鲁植雄;吴俊淦;姜春霞;金文忻【期刊名称】《浙江农业学报》【年(卷),期】2015(027)001【摘要】对拖拉机驾驶室实时信息管理系统的用户界面进行设计.首先基于“用户友好”的思想,根据拖拉机驾驶室的空间布局,合理布置信息管理系统的空间位置;然后分析研究驾驶员的操作习惯、思维方式,制定满足驾驶员需求的设计原则,并使用LabView软件设计系统用户界面,包括界面布局和界面设计.其中,用户界面包括基本信息界面、作业信息界面、摄像头监控界面和故障诊断界面.最后从颜色、指示灯、刻度盘和指针等4个方面对设计的用户界面进行评价.结果显示,所设计的用户界面布局符合驾驶员的认知心理和操作习惯,易于熟悉和掌握;图形化的界面生动形象,易于激发驾驶员工作中的乐趣;界面颜色搭配协调,控件布置具有层次性、逻辑性,操作模式与Windows系统一致.【总页数】7页(P121-127)【作者】周伟伟;鲁植雄;吴俊淦;姜春霞;金文忻【作者单位】南京农业大学工学院,江苏南京210031;江苏省智能化农业装备重点实验室,江苏南京210031;南京农业大学工学院,江苏南京210031;江苏省智能化农业装备重点实验室,江苏南京210031;南京农业大学工学院,江苏南京210031;江苏省智能化农业装备重点实验室,江苏南京210031;南京农业大学工学院,江苏南京210031;江苏省智能化农业装备重点实验室,江苏南京210031;南京农业大学工学院,江苏南京210031;江苏省智能化农业装备重点实验室,江苏南京210031【正文语种】中文【中图分类】S22;S237【相关文献】1.基于CATIA的汽车驾驶室的人机界面设计 [J], 李小建;杨随先2.007系列电影中的轿车驾驶室界面设计 [J], 郑艳玲;窦金花3.SPS物流模式在拖拉机驾驶室制造中的应用研究 [J], 李晓培4.农业装备驾驶室人机界面设计与评价知识库系统的构建 [J], 吴俊;金诚谦;汤庆;钱彬源5.汽车驾驶室的人机界面设计 [J],因版权原因,仅展示原文概要,查看原文内容请购买。
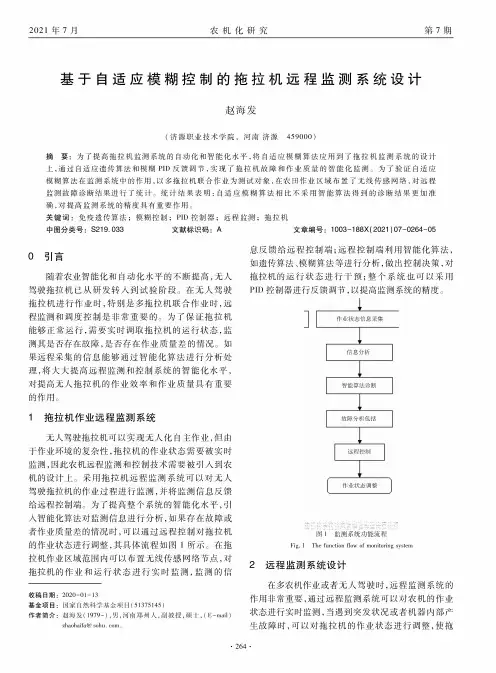
基于自适应模糊控制的拖拉机远程监测系统设计赵海发(济源职业技术学院,河南济源456000)摘要:为了提高拖拉机监测系统的自动化和智能化水平,将自适应模糊算法应用到了拖拉机监测系统的设计上,通过自适应遗传算法和模糊PID反馈调节,实现了拖拉机故障和作业质量的智能化监测。
为了验证自适应模糊算法在监测系统中的作用,以多拖拉机联合作业为测试对象,在农田作业区域布置了无线传感网络,对远程监测故障诊断结果进行了统计。
统计结果表明:自适应模糊算法相比不采用智能算法得到的诊断结果更加准确,对提高监测系统的精度具有重要作用。
关键词:免疫遗传算法;模糊控制;PIP控制器;远程监测;拖拉机中图分类号:S219.033文献标识码:A文章编号:1003-188X(2021)07-0264-050引言随着农业智能化和自动化水平的不断提咼,无人驾驶拖拉机已从研发转入到试验阶段。
在无人驾驶拖拉机进行作业时,特别是多拖拉机联合作业时,远程监测和调度控制是非常重要的。
为了保证拖拉机能够正常运行,需要实时调取拖拉机的运行状态,监测其是否存在故障,是否存在作业质量差的情况。
如果远程采集的信息能够通过智能化算法进行分析处理,将大大提高远程监测和控制系统的智能化水平,对提高无人拖拉机的作业效率和作业质量具有重要的作用。
1拖拉机作业远程监测系统无人驾驶拖拉机可以实现无人化自主作业,但由于作业环境的复杂性,拖拉机的作业状态需要被实时监测,因此农机远程监测和控制技术需要被引入到农机的设计上。
采用拖拉机远程监测系统可以对无人驾驶拖拉机的作业过程进行监测,并将监测信息反馈给远程控制端。
为了提高整个系统的智能化水平,引入智能化算法对监测信息进行分析,如果存在故障或者作业质量差的情况时,可以通过远程控制对拖拉机的作业状态进行调整,其具体流程如图、所示。
在拖拉机作业区域范围内可以布置无线传感网络节点,对拖拉机的作业和运行状态进行实时监测,监测的信收稿日期:7020-01-2基金项目:国家自然科学基金项目(5975145)作者简介:赵海发(1979-),男,河南郑州人,副教授,硕±,(E-mail) zhaohaifa@。
《车辆工程及机械零件软件》说明书1、软件安装:1.1、以管理员的身份登陆后,直接运行Setup.exe安装程序,根据安装程序的提示将软件安装到计算机的某个硬盘。
1.2、安装后先不要远行主程序,应首先运行钥匙软件(钥匙软件的名字一般是Key.exe),以便打开软件的使用权,否则软件有可能会自行删除。
2、软件运行:2.1、软件安装后,将在计算机桌面上形成一个快捷方式图标,用鼠标直接双击则可运行软件;也可通过系统的程序菜单运行。
注意:使用该软件的人必须有访问系统的权限(一般人都有这种权限)。
软件运行后,便自动要求你设定工作目录,你可以在新目录区输入新的工作目录,也可以通过来设置。
设置AutoCAD时,你可以在回话窗口中直接输入,也可以通过③、绘图部分:1)、绘制齿轮的参数表、写齿轮的技术条件和绘制齿轮的齿形轮廓线;2)、绘制齿轮端面的齿形轮廓。
④、附带资料部分:1)、渐开线圆柱齿轮基本齿廓;2)、标准模数【中国】、【苏联】、【德国】、【法国】、【日本】、【捷克斯洛伐克】。
3)、常用压力角;4)、公差图;5)、齿轮强度参考-多种拖拉机齿轮的计算结果;6)、齿轮刀具参考【直齿插齿刀: [GB6081-85]】4.1.2、圆锥齿轮:通过主程序的通用机械零部件设计→齿轮类→直、斜齿圆锥齿轮菜单可以启动【圆锥齿轮设计计算程序】。
本程序包括:①、齿轮设计计算部分(含:几何参数、精度和强度):1)、格利森制直齿或斜齿锥齿轮设计计算;2)、格利森制弧齿锥齿轮设计计算;(包括:1、通用机械弧齿轮;2、轻型汽车弧齿轮;3、中重型汽车弧齿轮;4、拖拉机弧齿轮;5、零度弧齿轮;6、ЗНИМС制弧齿轮)3)、奥利康制延伸外摆线N型锥齿轮设计计算;4)、奥利康制延伸外摆线G型锥齿轮设计计算;5)、格利森制准双曲面锥齿轮设计计算;6)、格利森制拖拉机高度变位差速器锥齿轮设计计算;7)、格利森制拖拉机角度变位差速器锥齿轮设计计算;8)、单独校核计算各种锥齿轮的强度。
农机车载系统的远程实时监控终端设计卜国顺【摘要】In the paper,a vehicle monitoring terminal for agricultural machinery filed is proposed,which takes STM32F103 as the core and uses GPS positioning technology,CAN communication technology and GPRS communication technology.The terminal can collect the vehicle status information in real-time and transmit it to the remote monitoring center through the wireless network.At the same time,it can handle the instructions from the remote monitoring center which include limiting the speed,locking the vehicle,and setting up electronic fences.It provides the data support for rapid vehicle fault location,maintenance and management.At present,the vehicle terminal has been applied in the agricultural vehicles of an agricultural machinery company in Luoyang and the operation is stable and reliable.%以嵌入式处理器STM32F103为核心,利用GPS定位技术、CAN通信技术、GPRS通信技术设计了一种专门针对农机领域的车载监控终端.该终端能够实现车辆位置信息、行车状态信息的实时采集与远程无线传输;同时,能够处理远程监控中心下达的指令,对车辆进行限速、锁车、设置电子围栏.目前,该终端已经在洛阳某农机公司的农机车辆上进行了应用,运行稳定可靠,为车辆快速故障定位、维修、管理提供了真实数据支撑.【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2017(017)011【总页数】5页(P68-72)【关键词】GPS;中断;STM32F103;CAN总线【作者】卜国顺【作者单位】重庆邮电大学通信与信息工程学院,重庆400065【正文语种】中文【中图分类】TP23农机租赁作为一种新的商业模式可以有效解决农民购买先进农机设备资金短缺的问题,促进我国农业机械化的发展,同时也有利于传统制造企业的转型升级[1]。
履带式拖拉机的智能控制系统设计与优化履带式拖拉机是一种广泛应用于农业生产的重要机械设备,它具有较强的越野能力和承载能力,为农民提供了卓越的助力。
随着科技的不断发展,智能控制系统的设计和优化变得越来越重要,它可以提高拖拉机的自动化程度、节约能源和提高生产效率。
一、设计目标在进行履带式拖拉机智能控制系统的设计时,我们需要明确设计目标,从而为后续的优化和改进提供明确的方向。
1. 自动驾驶功能:设计一个能够自动驾驶的拖拉机控制系统,使其能够在特定场景下自主驾驶,提高作业效率和安全性。
2. 能源节约:通过优化控制算法,减少不必要的能耗,降低燃料消耗量,实现能源的有效利用。
3. 效率提升:提高拖拉机的工作效率,减少人力和时间成本,使农民能够更高效地完成农业生产任务。
二、智能控制系统设计1. 传感器系统:在拖拉机上安装必要的传感器,如激光雷达、红外线传感器、GPS导航等,实时感知拖拉机周围的环境和当前位置。
2. 数据采集和处理:将传感器采集到的数据进行处理和分析,提取有用的信息,为后续的控制和决策提供基础。
3. 控制算法:基于传感器数据和预设的目标,设计合适的控制算法,实现拖拉机的自动驾驶和自动化作业。
4. 通信系统:与农场管理系统或中央控制中心进行信息交互,实现远程监控和指令传递。
5. 用户界面:设计一个友好的用户界面,供操作人员进行监控和操作,提供实时的工作状态和报警信息。
三、智能控制系统优化1. 路径规划:通过对地理数据的分析和优化算法的运用,确定最佳的路径规划方案,保证拖拉机能够高效地在农田中行驶,避免重复作业和跨越农作物。
2. 能源优化:通过改进控制算法、减少不必要的能耗和优化发动机的动力输出,实现能源的最优利用。
例如,根据土地条件和重量负荷,动态调整发动机的工作状态,减少能源浪费。
3. 故障诊断和维护:将传感器数据与故障数据库进行比对,利用人工智能技术进行故障诊断,提前预知拖拉机可能出现的故障,并给出故障排除的建议。
基于远程监控的农机管理系统的设计与应用随着现代化的农业生产方式的推进,传统的手工劳动已经不能满足现代农业的需求,农业机械化成为农业发展的必然趋势。
然而,管理大量农机设备也成为一个困扰农业生产的问题。
为了解决这个问题,远程监控的农机管理系统应运而生。
一、农机管理系统的架构农机管理系统的特点在于其具备多种设备的应用,因此它需要分层的架构。
系统包含终端设备层、通信层、应用层、管理层等几个主要部分。
1.终端设备层终端设备层是农机管理系统的硬件部分,包括了各种农业机械设备,如农用拖拉机、播种机、喷洒器、收割机等等。
终端设备通过传感器获取机器工作的数据,并将数据发送至控制端。
2.通信层通信层是系统中数据传输的最关键部分。
对于数据的立即相应和快速传输是非常重要的,这需要使用高效、安全的通信协议。
目前,主流的通信协议有TCP/IP、CAN和LoRaWAN等。
3.应用层应用层是系统中的逻辑处理单元,这是农机管理系统中的核心部分。
应用层负责接受各农机设备传递过来的数据,进行个性化的处理,为用户提供更加精确的信息。
例如:在不同的作物生长期内,管理层将不同的施肥方案通知应用层。
应用层根据用户的农机设备情况和所处的作物生长阶段,给出最适合的施肥方案,从而帮助用户更准确地制定生产计划。
4.管理层管理层是系统的控制单元,也是用户的控制台。
管理层会对应用层做出的决策进行管理,给出命令以及指示给其他层。
例如:管理层控制终端设备层农机的供电和升降、切换工作模式等命令。
同时,管理层也负责展示系统所收集到的数据、统计报告等等。
二、农机管理系统的应用1.实时监控农机管理系统实现了对农机设备的实时监控。
系统监控各个终端设备的运行情况,能够及时探测到故障,发出报警提醒,从而避免了故障造成的不可逆损失。
2.精准作业农机管理系统能够根据农机设备的工作状态、作物生长阶段等信息,为用户提供个性化的施肥建议和作业计划,从而实现精准作业。
3.管理模式农机管理系统可以为农业生产提供集中的销售管理和库存管理平台。
第11卷第3期2021年3月农业工程Agricultural EngineeringVol. 11 No.3Mar.2021无人驾驶拖拉机底层控制系统设计郝帅红,武志明,部韦輪,余科松,温盡伟(山西农业大学农业工程学院,山西晋中030801)摘要:随着科学技术的不断发展,无人驾驶技术越来越多地应用到农业机械领域。
以Q/C R01-2015型山地拖拉机为 载体,通过设计电子系统、液压系统等,实现对无人驾驶拖拉机的底层控制,设计方案易于施行,具备与智能决策系统对接的条件,方便对传统农机进行无人驾驶改造。
关键词:无人驾驶;拖拉机;底层控制系统;智能决策;芯片中图分类号:S24 文献标识码:A文章编号:2095-1795(2021 )03-0062-05Design of Bottom Control System for Unmanned TractorHAO Shuaihong,WU Zhiming,GUO Weitao,YU Kesong,WEN Xinwei(College o f Agricultural Engineering, Shanxi Agricultural University, Jinzhong Shanxi 030801,China)A b stract:With continuous development of science and technology, u n m a n n e d technology is more and more applied to field of agricultural machinery. Taking Q/C R01-2015 mountain tractor as carrier,through design of electronic system and hydraulic sys-tern, bottom control of u n m a n n e d tractor was realized. T h e design was easy to implement and had the conditions of docking with intelligent decision system. I t was convenient for u n m a n n e d transformation of traditional agricultural machinery.K eyw ords: u n m a n n e d,tractor,bottom control system,intelligent decision making, chip〇引言农田作业的现代化技术离不开机械化、自动 化[|]。