实验六
- 格式:doc
- 大小:108.50 KB
- 文档页数:2

实验六 利用电位差计测量电压一、实验目的1. 理解并掌握电位差计的工作原理;2. 掌握用箱式电位差计测量电压的方法。
二、实验器材直流稳压电源、电阻箱一个、滑线变阻器一个、万用表一个、箱式直流电位差计一只,导线等。
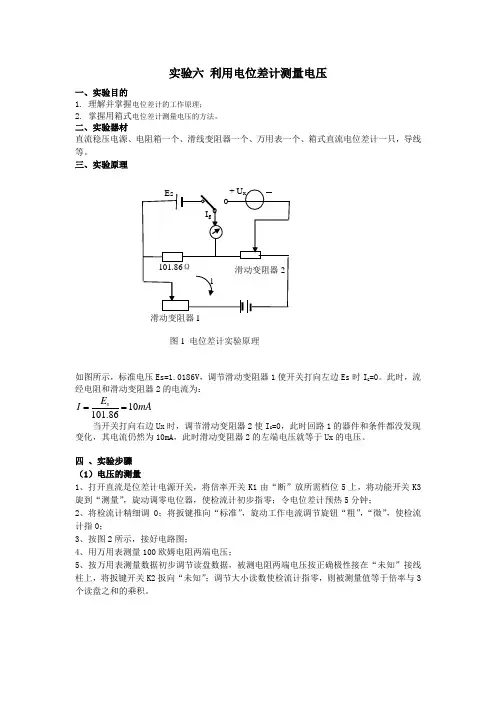
三、实验原理如图所示,标准电压Es=1.0186V ,调节滑动变阻器1使开关打向左边Es 时I G =0。
此时,流经电阻和滑动变阻器2的电流为:10101.86s E I mA == 当开关打向右边Ux 时,调节滑动变阻器2使I G =0,此时回路1的器件和条件都没发现变化,其电流仍然为10mA ,此时滑动变阻器2的左端电压就等于Ux 的电压。
四 、实验步骤(1)电压的测量1、打开直流是位差计电源开关,将倍率开关K1由“断”放所需档位5上,将功能开关K3旋到“测量”,旋动调零电位器,使检流计初步指零;令电位差计预热5分钟;2、将检流计精细调0;将扳键推向“标准”,旋动工作电流调节旋钮“粗”,“微”,使检流计指0;3、按图2所示,接好电路图;4、用万用表测量100欧姆电阻两端电压;5、按万用表测量数据初步调节读盘数据,被测电阻两端电压按正确极性接在“未知”接线柱上,将扳键开关K2扳向“未知”;调节大小读数使检流计指零,则被测量值等于倍率与3个读盘之和的乘积。
图1 电位差计实验原理图2 电位差计测量电压(2)电位差计的灵敏度电位差计的灵敏度定义为:电位差计平衡后,单位被测电压的变化所引起的检流计指针偏转的变化。
若改变平衡时的补偿电压U的改变量为△U,引起检流计指针的偏转为△n,则灵敏度S为:S=△n/△U =五、实验报告万用表测量电压值为电位差计测量值为电位差计的灵敏度S=。
实验六多相流流动特性冷模实验装置1、教学目的与要求:在化工过程及有关工业生产中,多相混合工艺占有很重要的地位,而其中最常用的混合设备是固-液体系搅拌槽。
固-液体系搅拌槽在采矿、食品、石油化工、造纸、能源工业、城市及工业废水处理中的得到了极为广泛的应用。
固液悬浮技术研究的重点是如何以最小的能耗获得所需要的悬浮效果。
衡量一个搅拌桨悬浮效果好坏的最主要判据是:使固体粒子离底悬浮的最低搅拌功率Pjs。
本试验的重点是测量使固体粒子离底悬浮的最低搅拌转速Njs,通过计算得出搅拌功率Pjs。
实验目的有两点:(1) 测定搅拌桨安装高度变化对悬浮效果的影响。
(2) 了解挡板对Pjs的影响。
2. 基本原理:离底悬浮的最低搅拌转速Njs定义为:使固体粒子在搅拌槽底静止时间小于2秒时所需的搅拌转速。
在一定范围内,搅拌桨安装高度对固-液悬浮效果有明显的影响,安装位置越高,Njs 越大。
输入功率定义为搅拌桨提供给流体的实际功率。
3. 实验装置:本实验装置简图如图1所示:如简图中所示:电机及减速机(4)的转速由调频器(3)来控制。
本实验装置电机转速:1400rpm,功率:1.1kW,减速机速比:i=2.64;搅拌轴最高允许转速:378rpm。
【对应的电机转速Nmotor=1000rpm】空转转速不允许超过20rpm,且空转时间不允许超过1分钟。
图1 搅拌实验装置流程图1——反光镜2——转速计(备用)3——调频器4——电机及减速机5——搅拌轴6——搅拌槽7——挡板8——搅拌桨实验条件:液相:自来水;搅拌槽直径T=0.28m,CBY桨直径0.092m。
液位高度:0.28m。
固相:树脂。
4. 实验方法:(1)转速的测定本实验搅拌转速通过读取变频器显示面板上的电机转速Nmotor除以减速机速比i得到。
N=Nmotor/2.64 (rpm)Njs的测定Njs的测定采用观察法。
调节搅拌转速[由高向低],通过反光镜观察的固体粒子在槽底的静止时间。

最新实验六(实验报告)实验目的:本次实验旨在探究特定物质在不同条件下的反应特性,以及通过实验数据分析物质的性质和变化规律。
通过对实验过程的观察和结果的记录,加深对理论知识的理解,并提高实验操作技能。
实验材料:1. 试样:待测物质样品2. 试剂:所需的化学反应试剂3. 仪器:天平、烧杯、量筒、滴定管、温度计、pH计、光谱仪等实验步骤:1. 准备阶段:根据实验要求,准确称取适量的试样和试剂,准备好所有实验仪器。
2. 实验操作:按照实验指导书的步骤,进行化学反应操作,记录下每个步骤的具体条件,如温度、pH值、反应时间等。
3. 数据收集:对反应过程中产生的数据进行收集,包括但不限于颜色变化、沉淀形成、气泡产生等。
4. 结果分析:根据收集到的数据,分析反应过程中物质的变化,以及反应的动力学特征。
5. 结论撰写:根据实验结果,撰写实验结论,总结物质的性质和反应特点。
实验结果:1. 反应速率:通过观察和记录,发现在特定条件下,反应速率与预期相符,具体数据见附录。
2. 产物分析:实验中产生的主要产物为X和Y,通过光谱分析确认了其结构。
3. 副反应:在实验过程中,未观察到明显的副反应现象。
4. 影响因素:实验中发现温度和pH值对反应速率有显著影响。
实验讨论:本次实验中,反应的速率和产物与理论预测基本一致,但在实际操作中存在一定的误差,可能的原因包括实验操作的不精确、环境条件的波动等。
未来可以通过改进实验方法和控制实验条件来减少误差。
结论:通过本次实验,我们成功地研究了特定物质在不同条件下的反应特性,并通过数据分析得到了物质的性质和反应规律。
实验结果对理解相关化学反应机制具有重要意义,并为进一步的实验研究提供了基础。
实验六:观察人血永久涂片一、实验目的:能够运用显微镜观察人血永久涂片,识别红细胞、白细胞和血小板。
二、操作步骤:操作内容操作细则取用器材1、一手握镜臂,一手托镜座,镜筒向前,镜臂向后,将显微镜从显微镜箱中取出;将显微镜安放在实验台距身前边缘7cm左右处,略偏左。
安装镜头2、安装好物镜和目镜。
对光3、转动粗准焦螺旋,使镜筒上升。
4、转动转换器,使低倍物镜正对通光孔。
5、转动遮光器,选择较大光圈对准通光孔。
6、左眼注视目镜内,右眼睁开,用手转动反光镜(要能根据光线强弱选择镜面),看到明亮视野。
用低倍镜观察人血永久涂片7、用洁净的纱布将人血永久涂片擦干净后放在载物台上,使涂片尽量正对通光孔的中心,用压片夹固定。
8、两眼从一侧注视物镜;双手顺时针方向转动粗准焦螺旋;使镜筒徐徐下降,直到物镜头接近涂片为止。
9、两眼睁开,左眼注视目镜;双手逆时针方向转动粗准焦螺旋,使镜筒慢慢上升,直至看到物像;若物像不在视野中央,移动装片使物像移到视野中央。
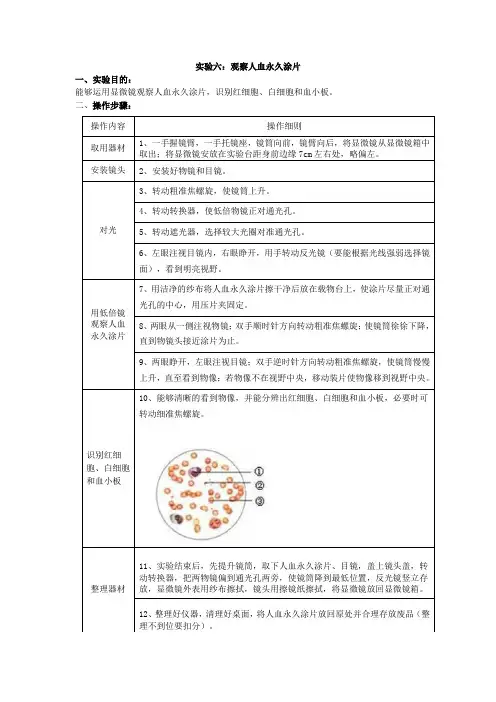
识别红细胞、白细胞和血小板10、能够清晰的看到物像,并能分辨出红细胞、白细胞和血小板,必要时可转动细准焦螺旋。
整理器材11、实验结束后,先提升镜筒,取下人血永久涂片、目镜,盖上镜头盖,转动转换器,把两物镜偏到通光孔两旁,使镜筒降到最低位置,反光镜竖立存放,显微镜外表用纱布擦拭,镜头用擦镜纸擦拭,将显微镜放回显微镜箱。
12、整理好仪器,清理好桌面,将人血永久涂片放回原处并合理存放废品(整理不到位要扣分)。
三、操作注意事项1、安放显微镜中的“7cm”是指距身前的边缘,而非实验台左侧边缘,这个距离与手掌的宽度相仿;2、手绝对不能接触目镜和物镜镜头的玻璃部分,镜头只能用擦镜纸擦拭;3、不能用手扳物镜转换镜头,要转动转换器(安装镜头的部位,大金属圆盘);4、对光后会看到视野特别明亮,打开实验台上的灯对光后甚至会很耀眼;5、对光后,不能移动显微镜;6、不能单手转动准焦螺旋,尽量不在高倍镜下转粗准焦螺旋;7、安放涂片时,需要用两个压片夹压住涂片;8、由于血液中白细胞的数量最少,需要学生认真的全方位的观察人血永久涂片;9、区分开杂质和红细胞、白细胞、血小板。
实验六验证机械能守恒定律验证机械能守恒定律。
1.在只有重力做功的自由落体运动中,物体的重力势能和动能互相转化,但总的机械能保持不变。
若物体某时刻瞬时速度为v,下落高度为h,则重力势能的减少量为mgh,动能的增加量为12m v2,看它们在实验误差允许的范围内是否相等,若相等则验证了机械能守恒定律。
2.速度的测量:做匀变速直线运动的物体某段位移中间时刻的瞬时速度等于这段位移的平均速度。
计算打第n点速度的方法:测出第n点与相邻前后点间的距离x n和x n+1,由公式v n=x n+x n+12T计算,或测出第n-1点和第n+1点与起始点的距离h n-1和h n+1,由公式v n=h n+1-h n-12T算出,如图所示。
铁架台(含铁夹),打点计时器,学生电源,纸带,复写纸,导线,毫米刻度尺,重物(带纸带夹)。
1.安装置:如图所示,将检查、调整好的打点计时器竖直固定在铁架台上,接好电路。
2.打纸带:将纸带的一端用夹子固定在重物上,另一端穿过打点计时器的限位孔,用手提着纸带使重物静止在靠近打点计时器的地方。
先接通电源,后松开纸带,让重物带着纸带自由下落。
更换纸带重复做3~5次实验。
3.选纸带:分两种情况说明(1)用12m v2n=mgh n验证时,应选点迹清晰,且第1、2两点间距离接近2 mm的纸带。
若第1、2两点间的距离大于2 mm,则可能是由于先释放纸带后接通电源造成的。
这样,第1个点就不是运动的起始点了,这样的纸带不能选。
(2)用12m v2B-12m v2A=mgΔh验证时,处理纸带时不必从起始点开始计算重力势能的大小,这样,纸带上打出的起始点O后的第一个0.02 s内的位移是否接近2 mm,以及第一个点是否清晰也就无关紧要了,实验打出的任何一条纸带,只要后面的点迹清晰,都可以用来验证机械能守恒定律。
1.测量计算在起始点标上0,在以后各计数点依次标上1、2、3…,用刻度尺测出对应下落高度h1、h2、h3…。
实验六动作捕捉系统实验一、实验目的通过动作捕捉实验,熟练运用运动作捕捉系统获取作业过程中的人体参数并进行分析处理,学会对作业者在作业过程中的工作姿态的评价和分析。
二、实验说明不良的作业姿势与不当的受力/施力状态已成为工人疲劳、肌肉骨骼职业疾病的重要原因。
传统的观察、测量、评价方法只能从外界获取工人所处的作业状态,在获取肌肉、骨骼、关节等组织的负荷、角度、速度参数时尚有不足。
本实验中介绍的动作捕捉系统可以实时获取作业过程中的身体姿势、解剖学角度、角速度、扭矩、足底压力等人体参数,对作业姿势的改进、作业方式的再设计提供了有效帮助。
目前动作捕捉系统已经广泛应用于动画制作、步态分析、生物力学、人因工程等领域。
三、实验仪器及原理无线传感运动动作捕捉及力学评估系统(Functional Assessment of Biomechanics, FAB)FAB是基于无线惯性传感技术的生物力学及动作评价系统。
系统由13个(标准配置)小巧轻便的传感器组成(根据需要可以扩充到17个)和一套数据分析、显示的软件。
传感器分别装配在头、上臂、下臂、胸、盆骨、大腿、小腿、足底。
通过弹性绷带可以将传感器固定在各个部位。
系统可以输出的人体参数有:扭矩、角速度、角加速度、空间角度、解剖学角度、足底压力、足底重量、力量、功率等。
特点:1、无线实时进行动作捕捉及数据分析;2、误差小准确性高使用范围广;3、体积小重量轻便携性好,安装方便使用简单;4、无线传输最远距离20米(开阔地带可达40米);5、解剖学角度、空间角度、力量、扭矩、角速度、角加速度等数据同步分析;6、数据可以传输存储在记忆卡,可将分析数据以Excel表格的形式导出;7、足底压力及足底重量数据同步采集。
FAB软件主界面该设备摆脱了摄像机的限制,并实现了对数据无损耗的特性,大大优于传统的动作捕捉系统,其能够将测量数据实时反映在计算机软件中,并且系统本身自带存储设备,可以完全远离固定场所,拥有很高的灵活性。
实验六甲基丙烯酸甲酯的本体聚合一、目的要求:1、了解本体聚合的原理,2、熟悉有机玻璃的制备方法。
二、原理:聚甲基丙烯酸甲酯(PMMA),俗称有机玻璃。
有机玻璃广泛用在工业、农业、军事、生活等的各个领域,如飞机、汽车的透明窗玻璃、罩盖等。
在建筑、电气、医疗卫生、机电等行业也广泛使用,如制造光学仪器、电器、医疗器械、透明模型、装饰品、广告铭牌等。
每年全世界要消耗数以百万吨的有机玻璃及其制品。
工业上制备有机玻璃主要采用本体、悬浮聚合法,其次是溶液和乳液法。
而有机玻璃的板、棒、管材制品通常都用本体浇铸聚合的方法来制备。
如果直接做甲基丙烯酸甲酯的本体聚合,则由于发热而产生气体只能得到有气泡的聚合物。
如果选用其它聚合方法(如悬浮聚合等)由于杂质的引入,产品的透明度都远不及本体聚合方法。
因此,工业上或实验室目前多采用浇注方法。
即:将本体聚合迅速进行到某种程度(转化率10% 左右)做成单体中溶有聚合物的粘稠溶液(预聚物)后,再将其注入模具中,在低温下缓慢聚合使转化率达到 93 ~ 95% 左右,最后在 100 ℃下聚合至反应完全。
其反应方程式如下:甲基丙烯酸甲酯在过氧化苯甲酰引发剂存在下进行如下聚合反应:本实验采用本体聚合法制备有机玻璃。
本体聚合是在没有介质存在的情况下只有单体本身在引发剂或光、热等作用下进行的聚合,又称块状聚合。
体系中可以加引发剂,也可以不加引发剂。
按照聚合物在单体中的溶解情况,可以分为均相聚合和多相聚合两种:聚合物溶于单体,为均相聚合,如甲基丙烯酸甲酯,苯乙烯等的聚合;聚合物不溶于单体,则为多相聚合,如氯乙烯,丙烯腈的聚合。
本体聚合的产物纯度高、工序及后处理简单,但随着聚合的进行,转化率提高,体系黏度增加,聚合热难以散发,系统的散热是关键。
同时由于黏度增加,长链游离基末端被包埋,扩散困难使游离基双基终止速率大大降低,致使聚合速率急剧增加而出现所谓自动加速现象或凝胶效应,这些轻则造成体系局部过热,使聚合物分子量分布变宽,从而影响产品的机械强度;重则体系温度失控,引起爆聚。
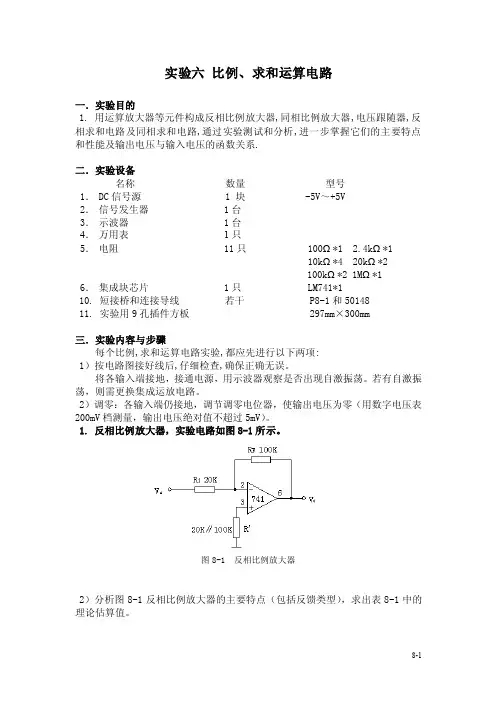
实验六比例、求和运算电路一.实验目的1. 用运算放大器等元件构成反相比例放大器,同相比例放大器,电压跟随器,反相求和电路及同相求和电路,通过实验测试和分析,进一步掌握它们的主要特点和性能及输出电压与输入电压的函数关系.二.实验设备名称数量型号1.DC信号源 1 块 -5V~+5V2.信号发生器 1台3.示波器 1台4.万用表1只5.电阻 11只 100Ω*1 2.4kΩ*110kΩ*4 20kΩ*2100kΩ*2 1MΩ*16.集成块芯片 1只 LM741*110. 短接桥和连接导线若干 P8-1和5014811. 实验用9孔插件方板 297mm×300mm三.实验内容与步骤每个比例,求和运算电路实验,都应先进行以下两项:1)按电路图接好线后,仔细检查,确保正确无误。
将各输入端接地,接通电源,用示波器观察是否出现自激振荡。
若有自激振荡,则需更换集成运放电路。
2)调零:各输入端仍接地,调节调零电位器,使输出电压为零(用数字电压表200mV档测量,输出电压绝对值不超过5mV)。
1. 反相比例放大器,实验电路如图8-1所示。
图8-1 反相比例放大器2)分析图8-1反相比例放大器的主要特点(包括反馈类型),求出表8-1中的理论估算值。
表8-12. 同相比例放大器,实验电路如图8-2所示。
1)分析图8-2同相比例放大器的主要特点(包括反馈类型),求出表8-2中各理论估算值,并定性说明输入电阻和电阻的大小。
图8-2 同相比例放大器表8-23. 电压跟随器,实验电路如图8-31)分析图8-3电路的特点,求出表8-3中各理论估算值。
图8-3 电压跟随器2)分别测出表8-3中各条件下的V o值。
表8-34. 反相求和电路,实验电路如图8-4 所示1)分析图8-4反相求和电路的特点,并估算:a. 按静态时运放两个输入端的外接电阻应对称的要求,R’的阻值应多大?b. 设输入信号V11=1V, V12=2V, V13=-1.5V, V14=-2V,试求出V o的理论估算值。
实验六-水样中pH 值的测定一、实验目的1、了解pH 值的直接电位法测定原理及方法;2、掌握酸度计的使用方法。
二、实验原理由pH 玻璃电极(指示电极)和饱和甘汞电极(参比电极)插入溶液中组成测定pH 值的原电池。
在一定条件下,电池电动势E 是试液中pH 值的线性函数。
测量E 时,若参比电极接正,则E = K + 0.059pH (25℃)上述能斯特公式中的K 值包括饱和甘汞电极电位、内参比电极电位、玻璃膜的不对称电位及参比电极与溶液间的液接电位,它难于用理论方法计算出来,但在一定得实验条件下是常数。
通常需要用与待测溶液pH 值接近的标准缓冲溶液进行校正,以抵消K 值对测量的影响。
其原理是:当电极对分别插入pH s 标准缓冲溶液和pH x 未知溶液中,电动势E s 和E x 分别为E s = K + 0.059pH s (25℃)E x = K + 0.059pH x (25℃)两式相减,得059.0059.0E pH E E pH pH s s x s x ∆+=-+= (25℃)在酸度计上,pH 示值按照ΔE/0.059分度,此分度值只适用于温度为25℃时。
为适应不同温度下的测量,需进行温度补偿。
在实际测定中,先将“温度补偿”旋钮调至溶液的温度处,然后将电极对插入已知pH s 的标准缓冲溶液中,用“定位”旋钮将仪器示值调节到pH s 的数值处,这叫“定位”校正(将K 值抵消)。
进行“温度补偿”和“定位”校正后,电极插入pH x 的试液中,仪器就可以直接显示出pH x 的测定值。
pH x 值的设定误差决定于pH s 的正确配置、两电极的性能及酸度计的情况。
一般说来,用一种标准溶液校正仪器后,再去测另一种标准溶液,若测定值与第二种标准溶液的pH 标准值误差小于允许值,则符合要求,否则应检查不准确的原因。
三、仪器与试剂1. 仪器pHS-2F 酸度计(1台)、pH 复合电极(1支)、塑料小烧杯(50mL 3只)2. 试剂pH 标准缓冲溶液:pH =4.01(0.05mol •L -1 KHC 8H 4O 4 溶液)、pH =6.86(0.025mol •L -1 KH 2PO 4 和0.025mol •L -1 Na 2HPO 4 的混合溶液)、pH =9.18(0.01mol •L -1 Na 2B 4O 7 •10H 2O 溶液);各种未知水样。
实验六教室卫生调查及测量方法教室是学生的重要学习环境。
其在建筑和设备方面是否符合卫生学要求,将直接影响到学生的健康、生长发育和学习效果。
卫生医师应根据国家有关法规和卫生标准,对使用的教室进行经常的卫生监督和评价。
重点为采光照明和课桌椅的调查和检测。
一、采光照明几项卫生指标测量方法(一)投射角和开角测量一般在教室选择离窗最远一排座位进行测量,所得数据即为教室的投射角和开角的最小值。
投射角:通常以室内桌面的—点至窗侧的水平线与该点到窗上缘联线之间的夹角。
要求距离进光面最远一列课桌面上的投射角(亦称入射角),不小于20~220。
开角:是指室内桌面一点与窗上缘联线和该点与对面遮挡物(如建筑物或高大树木等)顶点联线的夹角。
要求,距离进光面最远一列课桌面上所测得的开角不小于4~50,以控制窗外建筑物或高大树木对教室的自然采光影响,确保离窗最远的课桌而上获得较好的光照。
图6-1 教室投射角和开角的测量1.三角函数法⑴投射角:从欲测点A引处甲、乙两线,甲线通过窗上缘,相交与B点,乙线为从A 点引向窗侧的水平线,与窗玻璃或墙相交与D点,<BAD即为投射角(如图)。
用皮尺分别测量BD和DA线长度,按三角正切法,tan<BAD=BD/DA,再查三角函数正切表。
⑵开角:从A点向窗外最近建筑物(或遮挡物)顶部方向引丙线,该线与窗玻璃相交C 点,<BAC即为开角。
测量CD线的长度,按三角正切法,先求出<CAD的值,<BAD与<CAD 值相减,即为开角(<BAC)之值。
2.反射镜测量法应用光的反射定律,平面镜的物与象对称原理,可自制测角计测量教室的投射角和开角度数。
⑴投射角:将反射镜测角计平放在离窗最远的桌面上,镜的长轴对向窗户,测量者面对窗,从反射镜中看到玻璃上缘的倒影,移动头部至看到窗上缘倒影与反射镜中线重合为止,用手轻轻扭动半圆仪上的指针,使其横架于镜上的金属线倒影与玻璃窗上缘倒影及镜中线三者重合在一起,这时指针上所示度数即为投射角。
实验六二氧化碳相对分子质量的测定一、实验目的1.了解气体相对密度法测定CO2气体相对分子质量的原理和方法;2. 了解气体的净化和枯燥的原理和方法;3.熟练掌握启普发生器的使用;学会气压记的使用技术。
4. 进一步稳固称量操作方法和掌握天平的使用。
5.了解误差的概念,学习实验结果误差的分析。
二、实验用品仪器:启普发生器、洗气瓶、锥形瓶〔250ml〕、分析天平、台秤、气压计、量筒〔100ml〕、大烧杯药品:浓硫酸、盐酸〔6mol·L-1〕、大理石〔或石灰石〕、NaHCO3〔饱和〕材料:橡皮管、导气管、橡皮塞三、根本操作启普发生器1、组成:葫芦状的玻璃容器,球形漏斗,带旋塞的导气管2、原理:启普发生器用作不需加热、由块状固体与液体反响制取难溶性气体的发生装置。
启普发生器常用于制取氢气、二氧化碳、硫化氢气体。
启普发生器使用非常方便,使用时,只要翻开活塞,酸即进入中间球内,与固体接触而产生气体。
停顿使用时,只要关闭活塞,气体就会把酸从中间球压入下球及球形漏斗内,使固体与酸不再接触而停顿反响。
可供较长时间反复使用。
3、使用方法〔1〕装配——在球形漏斗颈部及旋塞处均应涂上凡士林,插好球形漏斗和玻璃旋塞,转动几次,使装配严密。
〔2〕检查气密性——开启旋塞,从球形漏斗口注水至充满半球体时,关闭旋塞。
继续加水,待水从漏斗管上升到漏斗球体内,停顿加水。
在水面处做一记号,静置片刻,如水面不下降,证明不漏气,可以使用。
〔3〕加试剂——在葫芦状容器的狭窄处垫一些玻璃棉或橡皮套,再参加块状或较大颗粒的固体试剂,均匀置于球形漏斗颈的周围后,塞上带导气管的单孔塞。
固体量不可太多,以不超过中间球体容积的1/3为宜。
液体从球形漏斗中参加,直至进入容器后又刚好浸没固体试剂,此时关闭导气管上的旋塞待用。
〔4〕发生气体——使用时,翻开活塞即可。
停顿使用时,关闭气体逸出导管的活塞,气体的压力使液体与固体别离即使反响停顿发生;翻开活塞,气体又重新产生。
实验六微生物细胞大小的测定一、目的要求1.学会测微尺的使用和计算方法。
2.掌握酵母菌细胞大小测定的方法。
二、基本原理微生物细胞大小,是微生物的形态特征之一,也是分类鉴定的依据之一。
由于菌体很小,只能在显微镜下测量。
用来测量微生物细胞大小的工具有目镜测微尺和镜台测微尺。
镜台测微尺是中央部分刻有精确等分线的载玻片。
一般将1mm等分为100格(或2mm等分为200格),每格长度等于0.01mm(即106μm)。
是专用于校正目镜测微尺每格长度的。
目镜测微尺是一块可放在接目镜内的隔板上的圆形小玻片,其中央刻有精确的刻度,有等分50小格或100小格两种,每5小格间有一长线相隔。
由于所用接目镜放大倍数和接物镜放大倍数的不同,目镜测微尺每小格所代表的实际长度也就不同,因此,目镜测微尺不能直接用来测量微生物的大小,在使用前必须用镜台测微尺进行校正,以求得在一定放大倍数的接目镜和接物镜下该目镜测微尺每小格的相对值,然后才可用来测量微生物的大小。
三、器材枯草芽孢杆菌染色玻片标本,目镜测微尺,镜台测微尺,显微镜,擦镜纸,香柏油等。
四、操作步骤1.目镜测微尺的标定(1)放置目镜测微尺取出接目镜,旋开接目镜透镜,将目镜测微尺的刻度朝下放在接目镜筒内的隔板上(图Ⅳ-4,B),然后旋上接目透镜,最后将此接目镜插入镜筒内(图Ⅳ-4,C)。
(2)放置镜台测微尺将镜台测微尺置于显微镜的载物台上,使刻度面朝上。
(3)校正目镜测微尺先用低倍镜观察,对准焦距,当看清镜台测微尺后,转动接目镜,使目镜测微尺的刻度与镜台测微尺的刻度平行,移动推动器,使目镜测微尺和镜台测微尺的某一区间的两对刻度线完全重合,然后计数出两对重合线之间各自所占的格数(图Ⅳ-6)。
根据计数得到的目镜测微尺和镜台测微尺重合线之间各自所占的格数,通过如下公式换算出目镜测微尺每小格所代表的实际长度。
目镜测微尺每小格长度(μm)=同法校正在高倍镜和油镜下目镜测微尺每小格所代表的长度。
实验六微生物的生理生化反应1、实验目的探究菌株在碳源同化、氮源利用、乙醇发酵和抗生素效价分析等方面不同的生长特性,观察并简要分析不同微生物的生理生化特征及其形成机理。
2、实验过程简述2.1 培养基与试剂准备2.1.1碳源同化培养基准备碳源为葡萄糖、半乳糖、蔗糖、麦芽糖、乳糖、棉籽糖、蜜二糖、纤维二糖、海藻糖、松三糖、可溶性淀粉、α-甲基葡萄糖苷的YNB 培养基,放入一根杜氏管。
2.1.2氮源同化培养基准备氮源为硫酸铵,尿素,蛋白胨,硝酸钾,无氮源YNB 的固体、液体培养基。
2.1.3 乙醇发酵用种子培养基:YPD 培养基2.1.4乙醇发酵用发酵培养基葡萄糖,酵母粉,蛋白胨,尿素,磷酸二氢钾,硫酸镁,氯化钙。
2.1.5抗生素效价测定用培养基:LB 培养基2.1.6青霉素:用pH 6.0 磷酸缓冲液配制,浓度为100 mg/ml,0.22μm 孔径过滤灭菌。
2.2 微生物的碳源同化和发酵1、从菌体斜面接一环菌于1 ml 无菌水中,室温静置2 h。
2、取200 μl 菌悬液,分别转接于含杜氏管的小试管中,静置培养48 h。
3、每24 h 观察记录生长和产气情况。
4、根据实验结果判断不同菌株对不同碳源的同化或发酵。
2.3 微生物的氮源利用1、从菌体斜面接一环菌于1 ml 无菌水中,室温静置2 h。
2、取200μl 菌悬液,分别转接于上述培养基小试管中,30℃或37℃静置培养48 h。
3、各取20μl 菌悬液,分别划线于不同氮源的固体平板上,待菌液被吸收后,培养皿倒置,静置培养48 h。
4、每24 h 观察记录生长情况,48 h 测定液体培养物的OD 600。
5、根据实验结果判断不同菌株对不同氮源的利用能力或偏好性。
2.4 酵母菌的乙醇发酵1、种子液培养:将酿酒酵母从菌种斜面上接一接种环至YPD 种子培养基中,30℃,200rpm,培养18 h。
2、乙醇发酵:按照10%(v/v)的比例将培养好的种子液接入100 ml 发酵培养基中,用无菌塑料布将封口密封,30℃,静置培养,每24 h 手摇1 次,发酵3-4 d。
嵌入式原理与应用实验实验六编写包含多文件的makefile
学号
姓名
班级
华侨大学电子工程系
实验六编写包含多文件的makefile
一、实验目的
通过对包含多文件的makefile 的编写,熟悉各种形式的makefile,并且进一步加深对makefile中用户自定义变量、自动变量及预定义变量的理解。
二、实验内容:
1、用vi 在同一目录下编辑两个简单的hello程序,如下所示:
#hello.c
#include "hello.h"
int main()
{
printf("Hello everyone!\n");
}
#hello.h
#include <stdio.h>
2、仍在同一目录下用vi 编辑makefile,且不使用变量替换,用一个目标体实现(即直接将hello.c和hello.h编译成hello目标体)。
然后用make验证所编写的makefile是否正确。
3、将上述makefile 使用变量替换实现。
同样用make 验证所编写的makefile是否正确。
4、编辑另一个makefile,取名为makefile1,不使用变量替换,但用两个目标体实现(也就是首先将hello.c 和hello.h 编译为hello.o,再将hello.o 编译为hello),再用make的“-f”选项验证这个makefile1 的正确性。
5、将上述makefile1 使用变量替换实现。
三、记录实验步骤及运行结果
设计完成上面实验的步骤,将运行结果截图,并对结果进行解释说明。