机电传动控制(第5版)-4
- 格式:ppt
- 大小:5.60 MB
- 文档页数:132

《机电传动控制》(第五版)教案第1章绪论1.1 机电系统的组成=机械运动部件+机电传动+电气控制系统。
1.机械运动部件——完成生产任务的基础,机械执行部分;2.机电传动———=电力传动或电力拖动,是驱动生产机械运动部件的原动机的总称;3.电气控制系统——控制电动机的系统。
1.2 机电传动的目的和任务1.机电传动的目的——将电能转变为机械能,实现生产机械的启动、停止、以及速度调节,满足各种生产工艺的要求,保证生产过程的正常进行2.机电传动的任务①广义上讲——使生产机械设备、生产线、车间甚至整个工厂都实现自动化。
②狭义上讲——专指控制电动机驱动生产机械,实现产品数量的增加、质量的提高、生产成本的降低、工人劳动条件的改善以及能源的合理利用。
1.3 机电传动控制的发展概况一、驱动系统的发展阶段:1.成组拖动——一台电动机拖动一根天轴—→通过带轮和传动带—→分别拖动各(一组)生产机械。
生产效率低、劳动条件差,一旦电动机或传动环节发生故障则造成成组生产机械停车。
2.单电动机——一台电动机拖动一台生产机械,较成组拖动进了一步。
但当生产机械的运动部件较多时,其机械传动机构则十分复杂。
3.多电动机拖动——一台生产机械的每一个运动部件都有专门的电动机拖动。
不仅大大简化了生产机械的传动机构,而且控制灵活,为自动化提供了有利条件,是现代化机电传动的典型方式。
二、控制系统的发展阶段:1.接触器+继电器控制——出现在20世纪初,应用广泛、成本低;但控制速度慢、精度差。
2.电动机放大机控制(30年代)、磁放大机控制(40~50年代)——从断续控制发展到连续控制,并具有了输出反馈环节,简化了控制系统、减少了电路触点、提高了可靠性。
3.大功率可控电力半导体器件控制——具有效率高、反应快、寿命长、可靠性高、维修容易、体积小、重量轻等优点。
由此,开辟了机电传动控制的新纪元。
4.采样控制——数控技术+微机应用的高水平断续控制,由于采样周期<<控制对象的变化周期,∴≌连续控制。

机电传动控制第五版课后答案--最全版机电传动控制是一门涉及机械、电气和控制等多领域知识的重要学科,对于相关专业的学生和从业者来说,掌握这门课程的知识至关重要。
而课后习题的答案则是检验学习成果、加深理解的重要工具。
以下为您提供机电传动控制第五版的课后答案,希望能对您的学习有所帮助。
第一章绪论1、机电传动控制的目的是什么?答:机电传动控制的目的是将电能转变为机械能,实现生产机械的启动、停止、调速、反转以及各种生产工艺过程的要求,以满足生产的需要,提高生产效率和产品质量。
2、机电传动系统由哪些部分组成?答:机电传动系统通常由电动机、传动机构、生产机械、控制系统和电源等部分组成。
电动机作为动力源,将电能转化为机械能;传动机构用于传递动力和改变运动形式;生产机械是工作对象;控制系统用于控制电动机的运行状态;电源则为整个系统提供电能。
3、机电传动系统的运动方程式是什么?其含义是什么?答:运动方程式为 T M T L =J(dω/dt) 。
其中,T M 是电动机产生的电磁转矩,T L 是负载转矩,J 是转动惯量,ω 是角速度,dω/dt 是角加速度。
该方程式表明了机电传动系统中电动机的电磁转矩与负载转矩之间的平衡关系,当 T M > T L 时,系统加速;当 T M < T L 时,系统减速;当 T M = T L 时,系统以恒定速度运行。
第二章机电传动系统的动力学基础1、为什么机电传动系统中一般需要考虑转动惯量的影响?答:转动惯量反映了物体转动时惯性的大小。
在机电传动系统中,由于电动机的转速变化会引起负载的惯性力和惯性转矩,转动惯量越大,系统的加速和减速过程就越困难,响应速度越慢。
因此,在设计和分析机电传动系统时,需要考虑转动惯量的影响,以确保系统的性能和稳定性。
2、多轴传动系统等效为单轴系统的原则是什么?答:多轴传动系统等效为单轴系统的原则是:系统传递的功率不变,等效前后系统的动能相等。
3、如何计算机电传动系统的动态转矩?答:动态转矩 T d = T M T L ,其中 T M 是电动机的电磁转矩,TL 是负载转矩。

机电传动控制冯清秀邓星钟第五版习题及答案(完整资料).doc【最新整理,下载后即可编辑】机电传动控制冯清秀邓星钟第五版习题及答案第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0 说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0 说明系统处于稳态(即静态)的工作状态。
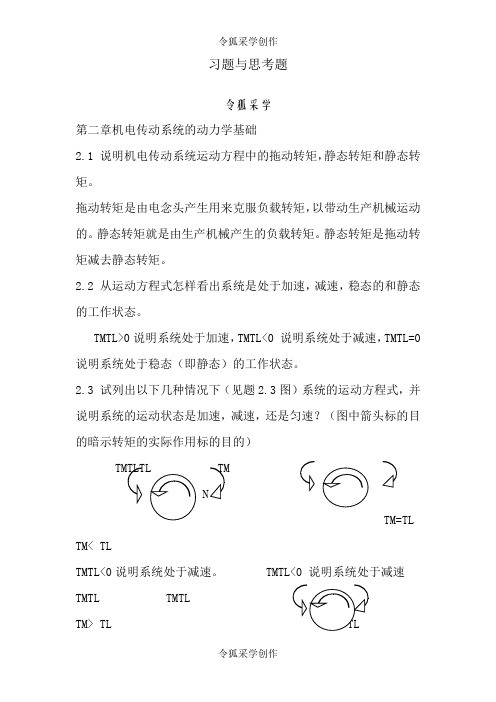
2.3 试列出以下几种情况下(见题2.3 图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TMTLT MTLNTM=TL TM< TLTM-TL>0 说明系统处于加速。
TM-TL<0 说明系统处于减速TM TLTM TLTM> TLTM> TL系统的运动状态是减速系统的运动状态是加速TMTLTM= TL TM=TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒M V=0.5Jω22.5 为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P 不变ω越小T越大,ω越大T越小。
2.6 为什么机电传动系统中低速轴的 GD2 逼高速轴的 GD2大得多?因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P 不变转速越小GD2 越大,转速越大G D2 越小。

机电传动与控制第五版答案第四章第四章5、1 有⼀台四极三相异步电动机,电源电压得频率为50H Z,满载时电动机得转差率为0、02求电动机得同步转速、转⼦转速与转⼦电流频率。
n0=60f/p S=(n0-n)/ n0=60*50/2 0、02=(1500-n)/1500=1500r/min n=1470r/min电动机得同步转速1500r/min、转⼦转速1470 r/min,转⼦电流频率、f2=Sf1=0、02*50=1 H Z5、2将三相异步电动机接三相电源得三根引线中得两根对调,此电动机就是否会反转?为什么?如果将定⼦绕组接⾄电源得三相导线中得任意两根线对调,例如将B,C两根线对调,即使B相遇C相绕组中电流得相位对调,此时A 相绕组内得电流导前于C相绕组得电流2π/3因此旋转⽅向也将变为A-C-B向逆时针⽅向旋转,与未对调得旋转⽅向相反、5、3有⼀台三相异步电动机,其n N=1470r/min,电源频率为50H Z。
设在额定负载下运⾏,试求:①定⼦旋转磁场对定⼦得转速;1500 r/min②定⼦旋转磁场对转⼦得转速;30 r/min③转⼦旋转磁场对转⼦得转速;30 r/min④转⼦旋转磁场对定⼦得转速;1500 r/min⑤转⼦旋转磁场对定⼦旋转磁场得转速。
0 r/min5、4当三相异步电动机得负载增加时,为什么定⼦电流会随转⼦电流得增加⽽增加?因为负载增加n减⼩,转⼦与旋转磁场间得相对转速( n0-n)增加,转⼦导体被磁感线切割得速度提⾼,于就是转⼦得感应电动势增加,转⼦电流特增加,、定⼦得感应电动使因为转⼦得电流增加⽽变⼤,所以定⼦得电流也随之提⾼、5、5 三相异步电动机带动⼀定得负载运⾏时,若电源电压降低了,此时电动机得转矩、电流及转速有⽆变化?如何变化?若电源电压降低, 电动机得转矩减⼩, 电流也减⼩、转速不变、5、6 有⼀台三相异步电动机,其技术数据如下表所⽰。
试求:①线电压为380V时,三相定⼦绕组应如何接法?②求n0,p,S N,T N,T st,T max与I st;③额定负载时电动机得输⼊功率就是多少?①线电压为380V时,三相定⼦绕组应为Y型接法、②T N=9、55P N/n N=9、55*3000/960=29、8NmTst/ T N=2 Tst=2*29、8=59、6 NmT max/ T N=2、0 T max=59、6 NmI st/I N=6、5 I st=46、8A⼀般n N=(0、94-0、98)n0n0=n N/0、96=1000 r/minS N= (n0-n N)/ n0=(1000-960)/1000=0、04P=60f/ n0=60*50/1000=3③η=P N/P输⼊P输⼊=3/0、83=3、615、7三相异步电动机正在运⾏时,转⼦突然被卡住,这时电动机得电流会如何变化?对电动机有何影响?电动机得电流会迅速增加,如果时间稍长电机有可能会烧毁、5、8 三相异步电动机断了⼀根电源线后,为什么不能启动?⽽在运⾏时断了⼀线,为什么仍能继续转动?这两种情况对电动机将产⽣什么影响?三相异步电动机断了⼀根电源线后,转⼦得两个旋转磁场分别作⽤于转⼦⽽产⽣两个⽅向相反得转矩,⽽且转矩⼤⼩相等。
令狐采学创作习题与思考题令狐采学第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和静态转矩。
拖动转矩是由电念头产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
静态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TMTL>0说明系统处于加速,TMTL<0 说明系统处于减速,TMTL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头标的目的暗示转矩的实际作用标的目的)TM< TLTMTL<0说明系统处于减速。
TMTL<0 说明系统处于减速 TMTL TMTL系统的运动状态是减速系统的运动状态是加速TMTLTMTL2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电念头一般具有较高的额定转速。
这样,电念头与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩年夜,高速轴转矩小?因为P= Tω,P不变ω越小T越年夜,ω越年夜T 越小。
2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2年夜很多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越年夜,转速越年夜GD2越小。
2.7 如图2.3(a)所示,电念头轴上的转动惯量JM=2.5kgm2, 转速nM=900r/min; 中间传动轴的转动惯量JL=16kgm2,转速nL=60 r/min。
第3章直流电机的工作原理及特性习题3.1 为什么直流电机的转子要用表面有绝缘层的硅钢片叠压而成?答案:直流电动机工作时,(1)电枢绕组中流过交变电流,它产生的磁通当然是交变的。
这个(2)变化的磁通在铁芯中产生感应电流。
铁芯中产生的感应电流,在(3)垂直于磁通方向的平面内环流,所以叫涡流。
涡流损耗会使铁芯发热。
为了减小这种涡流损耗,电枢铁芯采用彼此绝缘的硅钢片叠压而成,使涡流在狭长形的回路中,通过较小的截面,以(4)增大涡流通路上的电阻,从而起到(5)减小涡流的作用。
如果没有绝缘层,会使整个电枢铁芯成为一体,涡流将增大,使铁芯发热。
因此,如果没有绝缘,就起不到削减涡流的作用。
习题3.4 一台他励直流电动机在稳态下运行时,电枢反电势E =E1,如负载转矩TL =常数,外加电压和电枢电路中的电阻均不变,问减弱励磁使转速上升到新的稳定值后,电枢反电势将如何变化?是大于、小于还是等于E1?答案:∵当电动机再次达到稳定状态后,输出转矩仍等于负载转矩,即输出转矩T =T L =常200aae e ae m ae m e e R U n I K K R U n E K n T K I n n n K K K U T K =Φ=−ΦΦ=∴=Φ−Φ∴−∆=Φ=ΦQ Q 又当T=0a aU E I R =+数。
又根据公式(3.2), T =K t ФI a 。
∵励磁磁通Ф减小,T 、K t 不变。
∴电枢电流I a 增大。
再根据公式(3.11),U =E +I a ·R a 。
∴E=U -I a ·R a 。
又∵U 、R a 不变,I a 增大。
∴E 减小即减弱励磁到达稳定后,电动机反电势将小于E 1。
习题3.8 一台他励直流电动机的铭牌数据为:P N =5.5KW ,U N =110V ,I N =62A ,n N =1000r/min ,试绘出它的固有机械特性曲线。
(1)第一步,求出n 0 (2)第二步,求出(T N ,n N )答案:根据公式(3.15),(1-1)Ra =(0.50~0.75)(N N N I U P −1)NN I U我们取Ra =0.7(N N N I U P −1)NN I U, 计算可得,Ra =0.24 Ω 再根据公式(3.16)得,(1-2) Ke ФN =(U N -I N Ra )/n N =0.095 又根据(1-3) n 0=U N /(Ke ФN ),计算可得,n 0=1158 r/min 根据公式(3.17),(2-1) T N =9.55NNn P , 计算可得,T N =52.525 N ·M 根据上述参数,绘制电动机固有机械特性曲线如下:3.10一台他励直流电动机的技术数据如下:P N =6.5KW ,U N =220V , IN=34.4A , n N =1500r/min , R a =0.242Ω,试计算出此电动机的如下特性:①固有机械特性;②电枢附加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为U N /2时的人为机械特性; ④磁通φ=0.8φN 时的人为机械特性;并绘出上述特性的图形。
机电传动控制冯清秀邓星钟第五版习题及答案第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0 说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0 说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3 图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TMTLTLNTM=TL TM< TLTM-TL>0 说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TLTM>TL系统的运动状态是减速系统的运动状态是加速TMTM= TLTM=TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=T ω,p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5 为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T 越大,ω越大T 越小。
2.6 为什么机电传动系统中低速轴的GD2 逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P 不变转速越小GD2 越大,转速越大GD2 越小。