第3章_范数理论及其应用
- 格式:ppt
- 大小:1.58 MB
- 文档页数:62
淮北师范大学2013届学士学位论文范数在数值计算中的应用学院、专业数学科学学院数学与应用数学研究方向数值分析学生姓名李双阳学号***********指导教师姓名陈昊指导教师职称讲师2013年月日范数在数值计算中的应用李双阳(淮北师范大学数学科学学院,淮北,235000)摘要范数在解决数值计算中的一些问题有很大的用处。
应用复合最速下降法,给出了求解矩阵方程组(AXB=E,CXD=F)加权范数下对称解及最佳逼近问题的迭代解法。
对任意给定的初始矩阵,改迭代算法能够在有限步迭代计算之后得到矩阵方程组的对称解,并且在上述解集合中也可以给出指定矩阵的最佳逼近矩阵。
并对线性方程组解的误差估计的推广定理理解对解的误差与矩阵、摄动矩阵、向量、摄动向量、算子范数之间的关系进行证明。
从而了解范数以及极限的概念以致更好的解决像函数的一次逼近、二次逼近、矩阵方程组对称解的最佳逼近以及线性方程组解的误差估计等数值计算问题。
关键词:最速下降法,对称解,最佳逼近,摄动矩阵,算子范数Norm in the application of the numerical calculationLi Shuangyang(School of Mathematical Science, Huaibei Normal University, Huaibei, 235000)AbstractNorm in numerical calculation in solving the problems are of great use. Application of compound the steepest descent method, solving matrix equations is presented (AXB = E, CXD = F) weighted norm under symmetric solution and the optimal approximation problem of iterative method. On any given initial matrix, the iterative algorithm can step in finite iterative calculation after get the symmetric solutions of matrix equations, and also in the solution set can be specified matrix optimal approximation of the matrix is given. And the error estimates of solutions of the linear equation theorem to understand the solution of the error and matrix, the perturbation matrix, vector, the perturbation dynamics, the relationship between the operator norm. To understand the norm and the concept of limit so that a better solution as a function of an approximation, quadratic approximation, symmetric matrix equations solution of the optimal approximation and the error of linear equations and numerical calculation.Key words:The steepest descent method, the symmetric solution of optimal approximation, the perturbation matrix operator norm目录一.引言................................................................................................ - 1 -二.范数性质........................................................................................... - 2 -2.1向量范数、矩阵范数的基本性质 ........................................... - 2 -定理2.1.1 .................................................................................. - 2 -定理2.1.2 .................................................................................. - 2 -定理2.1.3 .................................................................................. - 2 -定理2.1.4 .................................................................................. - 2 -定理2.1.5 .................................................................................. - 2 -2.2.李普希兹条件下范数的一些性质 ........................................... - 4 -定理2.2.1.................................................................................. - 4 -定理2.2.2 .................................................................................. - 4 -定理2.2.3 .................................................................................. - 4 -定理2.2.4 .................................................................................. - 5 -定理2.2.5 .................................................................................. - 5 -定理2.2.6 .................................................................................. - 6 - 三.加权范数下矩阵方程组的对称解及其最佳逼近 ....................... - 6 - 例题............................................................................................ - 8 -四.向量范数、矩阵范数下线性方程组解的误差估计的推广 ........ - 10 -4.1证明.......................................................................................... - 10 -4.2证明.......................................................................................... - 11 - 结论...................................................................................................... - 12 -参考文献.............................................................................................. - 12 - 致谢...................................................................................................... - 13 -一.引言近年来,随着计算机技术的普及和计算速度的不断提高,数值计算在工程设计和分析中得到了越来越广泛的重视,已经成为解决复杂的工程分析计算问题的有效途径,现在从汽车到航天飞机几乎所有的设计制造都已离不开数值计算,其在航空航天、汽车、土木建筑、电子电器、国防军工、船舶、铁道、石化、能源、科学研究等各个领域的广泛应用已使设计水平发生了质的飞跃。
关于范数的总结范文
一、范数的定义
范数(Norm)是对向量空间中的向量长度或矩阵列之间的距离的度量。
范数具有很好的抽象性,可以用来衡量向量与向量、矩阵与矩阵之间的距
离(不同定义的范数衡量的是不同的距离),是向量空间、矩阵理论以及
机器学习和深度学习等各个领域都很重要的概念。
范数,由曼哈顿距离和欧氏距离得名,有着自然的几何解释:向量或
矩阵表示为一个点,范数则表示为该点到原点的距离。
向量空间中的范数
不仅代表着向量的长度,还可以用来衡量向量之间的距离,从而被广泛应
用于不同的领域,其中有几种范数的定义比较重要,如曼哈顿距离、欧式
距离、切比雪夫距离和闵式距离等。
二、范数的分类
1)一阶范数:一阶范数是指向量中元素绝对值之和,或者是矩阵每
一列元素绝对值之和,也就是模,常用的一阶范数有曼哈顿距离L1、欧
氏距离L2和切比雪夫距离L∞。
2)二阶范数:二阶范数是指向量每个元素的绝对值平方和,或者是
矩阵每一列元素的绝对值平方和,也叫做F范数或Frobenius范数。
它表
示的是一个矩阵中向量的总范数,常用于评估数据的分布特征。

向量范数在一维空间中,实轴上任意两点距离用两点差的绝对值表示。
绝对值是一种度量形式的定义。
范数是对函数、向量和矩阵定义的一种度量形式。
任何对象的范数值都是一个非负实数。
使用范数可以测量两个函数、向量或矩阵之间的距离。
向量范数是度量向量长度的一种定义形式。
范数有多种定义形式,只要满足下面的三个条件即可定义为一个范数。
同一向量,采用不同的范数定义,可得到不同的范数值。
定义3.1 对任一向量,按照一个规则确定一个实数与它对应,记该实数记为,若满足下面三个性质:若X是数域K上的线性空间,泛函║·║: X->R 满足:1. 正定性:║x║≥0,且║x║=0 <=> x=0;2. 正齐次性:║cx║=│c│║x║;3. 次可加性(三角不等式):║x+y║≤║x║+║y║ 。
那么║·║称为X上的一个范数。
常用范数这里以C^n空间为例,R^n空间类似。
最常用的范数就是p-范数。
若x=[x1,x2,...,xn]^T,那么║x║p=(|x1|^p+|x2|^p+...+|xn|^p)^{1/p}可以验证p-范数确实满足范数的定义。
其中三角不等式的证明不是平凡的,这个结论通常称为闵可夫斯基(Minkowski)不等式。
当p取1,2,∞的时候分别是以下几种最简单的情形:1-范数:║x║1=│x1│+│x2│+…+│xn│2-范数:║x║2=(│x1│^2+│x2│^2+…+│xn│^2)^1/2∞-范数:║x║∞=max(│x1│,│x2│,…,│xn│)其中2-范数就是通常意义下的距离。
定理中任意两种向量范数║x║α,║x║β是等价的,即有m,M>0使m║x║α≤║x║β≤M║x║可根据范数的连续性来证明它.由定理1可得定理2.设{x(k)}是Cn中向量序列,x是Cn中向量,则║x(k)-x║→0(k→∞) iff xj(k)-xj→0,j=1,2,…,n(k→∞)其中xj(k)是x(k)的第j个分量,xj是x的第j个分量.此时称{x(k)}收敛于x,记作x(k)→x(k→∞),或 .矩阵范数一般来讲矩阵范数除了正定性,齐次性和三角不等式之外,还规定其必须满足相容性:║XY║≤║X║║Y║。

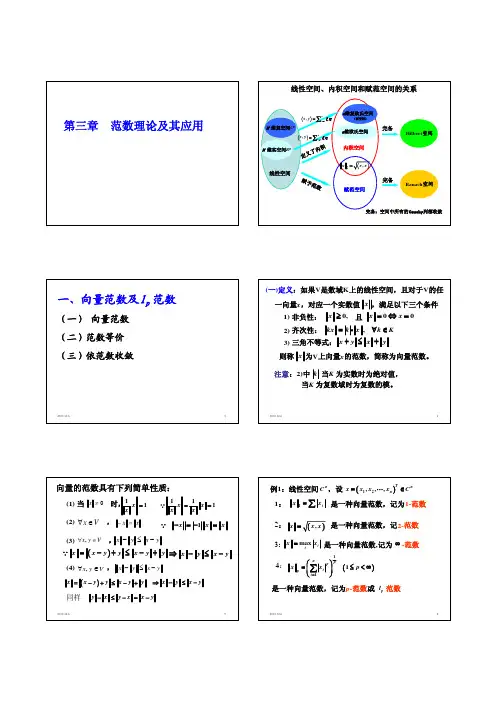
第三讲 范数理论及其应用一、向量范数1、向量范数定义:设V 为数域K 上的向量空间,若对于V 的任一向量x ,对应一个实值函数x ,并满足以下三个条件: (1)非负性 x 0≥,等号当且仅当x=0时成立; (2)齐次性 x x ,k,x V;α=αα∈∈ (3)三角不等式x y x y ,x,y V +≤+∈。
则称x 为V 中向量x 的范数,简称为向量范数。
例1. n x C ∈,它可表示成[]T12n x =ξξξ ,i C ξ∈,1n22i 2i 1x ∆=⎛⎫=ξ ⎪⎝⎭∑就是一种范数,称为向量的2-范数或l 2范数。
证明:(i )非负性 1n22i 2i 1x 0=⎛⎫=ξ≥ ⎪⎝⎭∑,当且仅当()i 0i 1,2,,n ξ== 时,即x =0时,2x =0(ii )齐次性 11nn2222i i 22i 1i 1x x ==⎛⎫⎛⎫α=αξ=αξ=α ⎪⎪⎝⎭⎝⎭∑∑(iii )[]T12n y =ηηη ,i C η∈[]T1122n n x y +=ξ+ηξ+ηξ+η n22i i 2i 1x y =+=ξ+η∑()22222i i i i i i i i i i 2Re 2ξ+η=ξ+η+ξη≤ξ+η+ξη n222i i 222i 1x y x y 2=+≤++ξη∑()222222222x yx y 2xy +=++根据Hölder 不等式:11nnnpqp q i i i i i 1i 1i 1a b a b ===⎛⎫⎛⎫≤ ⎪⎪⎝⎭⎝⎭∑∑∑,i i 11p,q 1,1,a ,b 0p q >+=> 11nnn2222i i i i 22i 1i 1i 1xy ===⎛⎫⎛⎫=ξη≥ξη ⎪ ⎪⎝⎭⎝⎭∑∑∑∴ 222x y x y +≤+ 2、范数的意义范数可以看作长度概念的推广,主要用于逼近的程度。
范数是用来描述向量的长度的,因为向量的长度可以用来刻画向量序列的性质(如收敛或发散)。
范数(norm)【范数定义】⾮负实值函数(⾮线性)1)⾮负性: || a || >= 02)齐次性: || ka || = |k| ||a||3)三⾓不等式: || a + b || <= || a || + || b ||注:完备的线性赋范空间称为巴拿赫空间(Banach Space)【向量范数】l p范数(p范数): || x ||p = ( Σ |x i|p )1/p ( p = 1 ~ ∞ )l1范数 ( p = 1 ), || x ||1 = Σ |x i|l2范数 ( p = 2 ), || x ||1 = ( Σ |x i|2 )1/2(Euclidean Norm)l∞范数 ( p = ∞ ), || x ||∞ = max i { |x i| }【矩阵范数】Frobenius Form:|| A ||F = ( tr( A H A ) )1/2谱范数:|| A ||2 = ( lamda max( A H A ) )1/2 ( A的最⼤奇异值,或者A H A的最⼤特征值 )【相容矩阵范数】对于C mxn上的矩阵范数 || • ||,满⾜ || AB || <= || A || || B ||Frobenius Form是相容范数(但不是算⼦范数)【算⼦范数】设 || • ||u和 || • ||v分别是C m和C n上的向量范数,则导出C mxn上的矩阵范数 || • ||uv, || A ||uv = max { || Ax ||u } , s.t. || x ||v = 1谱范数由向量范数 || • ||2导出算⼦范数是相容范数【对偶范数(dual norm)】定义:令 || • ||为R n上的范数,定义对偶范数 || • ||* 为: || z ||* = sup { z T x }, s.t. ||x|| <= 1性质:l p范数的对偶范数是l q范数,其中1/p + 1/q = 1证明:通过Holder不等式证明 |l2范数的对偶范数是l2范数l1范数的对偶范数是l∞范数。
范数及其应⽤范数的⼀般化定义:设p ≥1的实数,p-norm 定义为:||x ||p :=(n∑i =1x ip )1p||x ||0:=n∑i =0x 0i严格来讲,L0不属于范数,上⾯的公式让⼈难以理解。
在实际应⽤中,⼈们往往采⽤以下定义:||x ||0=#(i )with x i ≠0其表⽰向量中所有⾮零元素的个数。
||x ||1:=n∑i =1x i也称为曼哈顿距离。
L0范数是指向量中⾮0的元素的个数。
如果我们⽤L0范数来规则化⼀个参数矩阵W 的话,就是希望W 的⼤部分元素都是0。
换句话说,让参数W 是稀疏的。
看到了“稀疏”⼆字,⼤家都应该从当下风风⽕⽕的“压缩感知”和“稀疏编码”中醒悟过来,原来⽤的漫⼭遍野的“稀疏”就是通过这玩意来实现的。
但你⼜开始怀疑了,是这样吗?看到的papers 世界中,稀疏不是都通过L1范数来实现吗?脑海⾥是不是到处都是||W||1影⼦呀!L1范数和L0范数可以实现稀疏,L1因具有⽐L0更好的优化求解特性⽽被⼴泛应⽤。
范数中最常见,也最著名的⾮L2范数莫属。
||x ||2:=n∑i =1x 2i从学习理论的⾓度来说,L2范数可以防⽌过拟合,提升模型的泛化能⼒。
从优化或者数值计算的⾓度来说,L2范数有助于处理不好的情况下矩阵求逆很困难的问题。
L1和L2的差别,为什么⼀个让绝对值最⼩,⼀个让平⽅最⼩,会有那么⼤的差别呢?下降速度:L1就是按绝对值函数的“坡”下降的,⽽L2是按⼆次函数的“坡”下降。
模型空间的限制:对于L1和L2规则化的代价函数来说,我们写成⼀下形式:Lasso :minw||y−Xw ||2,s .t . ||w ||1≤CRidge :minw||y −Xw ||2,s .t . ||w ||2≤C考虑⼆维的情况,等⾼线与norm ball 相交的地⽅就是最优解。
L1-ball 的最优点⼤都出现在"⾓点"处,这便⼤概率产⽣了稀疏性;L2-ball 却不范数||L0范数√L1范数||L2范数√L2范数的优点可以,它只是⼀种规则化⼿段。