自适应滤波、预测与控制思维导图
- 格式:xmin
- 大小:6.34 KB
- 文档页数:1

课程的评语范文1、教学重难点突出,板书条理清晰。
教学步骤设计合理,由浅入深,循序渐进。
2、教师基本功扎实,知识讲解准确,教学设计合理,始终以学生为主体,自主学习,小组交流讨论,上台交流展示等形式,师生配合默契,取得了较好的学习效果。
3、教师教态自然,语调亲切,并不断鼓励学生,充分发挥学生的主体作用。
使学生在和谐融洽的课堂氛围中学习,推进了知识的掌握和智力的发展,达到了良好的教学效果。
4、教师准确的把握了设疑的方向,调动了学生学习的兴趣,使学生进入积极的的思维状态。
5、教师组织课堂教学效果好,语言清晰,能注重学法指导,培养学生的创新能力,问题设计富有启发性。
6、教学环节设计安排清晰明了,过渡自然。
7、老师以渊博的知识,青春的激昂,璀璨的语言,悦耳的语音,扮演者精典式的演讲,令人心悦诚服,耳目一新,有身临其境之感,真是众妙毕绝啊。
本节课引经据典,恰如其分,启发深思,事半功倍,旁敲侧击,循循善诱。
无粉饰之患,无喧宾夺主之影。
x老师注重读,读是语文教学的`根,抓住了读,就抓住了整个语;书读百遍,其义自见,这是睿智的选择。
9、教师语言语调抑扬顿挫,普通话过硬,板书优美,基本功扎实,能循循善诱,逐步引导学生思考问题及分析事件与人物,解决讨论要点有成效。
并注重学生的诵读能力口头表达能力的培养,学生的学习习惯较好。
10、该专题内容丰富多彩,一定程度上积淀了学生的文学素养,学生参与多,课件精美,涉及知识范围广,开阔学生眼界,点面结合加练笔,让学生对鸟的认识逐步深入,效果较好。
11、语言富有情趣,给人的感觉很亲切教态恩好,同时在课堂中让学生了解到数学与生活息息相关,使学生对数学产生了求知欲,对数学的知识也产生了兴趣,从而这样的课堂效果会很好,该老师的提问也很到位,在同学产生疑问的时候也引导的很到位,课件做的也非常好,很吸引小朋友的眼球,那么这样的教学就会避免小朋友做与课堂其它的事情,而是去仔细的观察课件,思考问题,唯有一点点不足的地方就是课件有点小小的问题。

第二章自适应滤波器原理2.1 基本原理2.1.1 自适应滤波器的发展在解决线性滤波问题的统计方法中,通常假设已知有用信号及其附加噪声的某些统计参数(例如,均值和自相关函数),而且需要设计含噪数据作为其输入的线性滤波器,使得根据某种统计准则噪声对滤波器的影响最小。
实现该滤波器优化问题的一个有用方法是使误差信号(定义为期望响应与滤波器实际输出之差)的均方值最小化。
对于平稳输入,通常采用所谓维纳滤波器(Wiener filter)的解决方案。
该滤波器在均方误差意义上使最优的。
误差信号均方值相对于滤波器可调参数的曲线通常称为误差性能曲面。
该曲面的极小点即为维纳解。
维纳滤波器不适合于应对信号和/或噪声非平稳问题。
在这种情况下,必须假设最优滤波器为时变形式。
对于这个更加困难的问题,十分成功的一个解决方案使采用卡尔曼滤波器(Kalman filter)。
该滤波器在各种工程应用中式一个强有力的系统。
维纳滤波器的设计要求所要处理的数据统计方面的先验知识。
只有当输入数据的统计特性与滤波器设计所依赖的某一先验知识匹配时,该滤波器才是最优的。
当这个信息完全未知时,就不可能设计维纳滤波器,或者该设计不再是最优的。
而且维纳滤波器的参数是固定的。
在这种情况下,可采用的一个直接方法是“估计和插入过程”。
该过程包含两个步骤,首先是“估计”有关信号的统计参数,然后将所得到的结果“插入(plug into)”非递归公式以计算滤波器参数。
对于实时运算,该过程的缺点是要求特别精心制作,而且要求价格昂贵的硬件。
为了消除这个限制,可采用自适应滤波器(adaptive filter)。
采用这样一种系统,意味着滤波器是自设计的,即自适应滤波器依靠递归算法进行其计算,这样使它有可能在无法获得有关信号特征完整知识的环境下,玩完满地完成滤波运算。
该算法将从某些预先确定的初始条件集出发,这些初始条件代表了人们所知道的上述环境的任何一种情况。
我们还发现,在平稳环境下,该运算经一些成功迭代后收敛于某种统计意义上的最优维纳解。
浙教版八年级科学下册思维导图(全册)第1章电和磁思维导图目录电和磁节节节节节节一P1 2 3 4 56 7M H指南针为什么能指方向 电生磁 电磁铁的应用 电动机 磁生电 家庭电路 电的安全使用编十"*0 ■< ■J — * "恤 f勁电动机Cg ]电GR 铁的应用圖1BE休上磁性最强的部位H If理N祀険决淇*同名拠相互抖E斥异名磁极相互啪引衙极间的作用f使没有谨性的物体得到遊性的过程-晦念用蛊箱在钢棒上沿同一方向摩擦十第次「方法磁现象附地暉场地理南极是地磁场的北饭,地理北饭是地磁场的南扱指南针南极指南(地磁场北极)小谨针北极所着的方向为磁场方向百箭头義顽磁场方向;磁感红密磁场强r疏磁场弱夕HE场:从N到S内部逑场:从5到N底屯导件同围存在葩场-冥斯桔实殓醯场电导融中心的同「匕圍「吕通电导録垂亘「向夕曲场逐渐林电生蹿调节R,比较A喙弓I大头针的雰少-赳施大<1、探究电晞铁r-晡性强弱的影响因索羽右手:如图大拇指方向为电磴方向,0 指环毙方向为磁场方向咏变,血中有无枝芯比较大头針旁少自无扶苗用右手:四指坯绕庁叵为电踰方向「大拇指戶鬥旨万向为电竝铁N战方向fVF变B下面大淘+的雰少-戒圏降电遵扶的磁场廿在卑条形磁铁相似通过目隔的佔无殛制歯钳肖无电珮趙重机电拎:随温度上升接通担制宙源,产生魏生吸引衔铁,电铃咂电徳蹩电器具悴应用来垃自动控制:随着水上升,达到嘗戒水位时接11控制电懑「产生磁性吸引衔铁,红XJ亮电訖夭小至化的叫輯电隹号匣过电主v彖決听-> 生兀同的逑注,丛而校薄全屋版产生石同'吃(転訪來圧愿肖电詛专提哥輕=挖制电番工柞乜毒廩理:挖制电勝幵驻整通衔誹吸下,每灯亮,览制电痒幵爻断幵「匚弹蚩吸引D与与惑ftawcr亮臓:低电庄翦电舷制茗电压强电渝r 并巨可以实验巨商咼制通电导体在磁场中受力运动。
运动方向与电漩方向、磁场方向有芙基本原理运动方向判断(左手定律)如图磁感纯穿过手心,四指方向为电流方电‘大拇拒方向国受力运动的方向电动机画电动机廈理通电注昌在金场牛受巧转动,乙圏中线困受力转动,转到甲厘所示位置* 田于二力平衡「不能继绽转动。
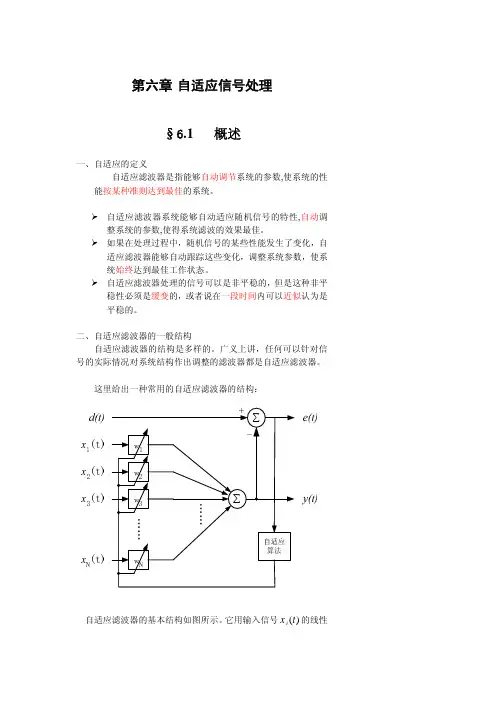
第六章 自适应信号处理§6.1 概述一、自适应的定义自适应滤波器是指能够自动调节系统的参数,使系统的性能按某种准则达到最佳的系统。
¾ 自适应滤波器系统能够自动适应随机信号的特性,自动调整系统的参数,使得系统滤波的效果最佳。
¾ 如果在处理过程中,随机信号的某些性能发生了变化,自适应滤波器能够自动跟踪这些变化,调整系统参数,使系统始终达到最佳工作状态。
¾ 自适应滤波器处理的信号可以是非平稳的,但是这种非平稳性必须是缓变的,或者说在一段时间内可以近似认为是平稳的。
二、自适应滤波器的一般结构自适应滤波器的结构是多样的。
广义上讲,任何可以针对信号的实际情况对系统结构作出调整的滤波器都是自适应滤波器。
这里给出一种常用的自适应滤波器的结构:∑自适应滤波器的基本结构如图所示。
它用输入信号()i x t 的线性组合,去逼近输入信号,然后,根据逼近误差,利用自适应算法调整各个加权系数,使得输出的误差信号在最小均方误差意义上达到最佳。
()d t ()e t i w 其中:¾ 被称为输入信号,它是系统接收到信号。
一般情况下,它是由有用信号和干扰信号两部分组成,即()d t ()()()d t s t n t =+¾ ()i x t 被称为参考信号,它一般包含有干扰信号的某些信息,但是不含有有用信号的信息。
这里N 个参考信号的取得方法因各种应用不同而异。
例如,可以通过一系列延时器以后给出:()n t ()s t¾ 是自适应滤波器的输出信号,当滤波器进入稳定状态时,它就是有用信号的一个估计值;()e t ()s t ¾ 是自适应滤波器的输出误差信号,当滤波器进入稳定状态时,它给出了噪声信号的估计;()y t例1:工频干扰噪声抵消在微弱信号测量中,接收到的信号中不可避免地存在50Hz 的交流电的干扰信号。
这个信号是一个频率固定,但是幅度和相位未知的随机信号。

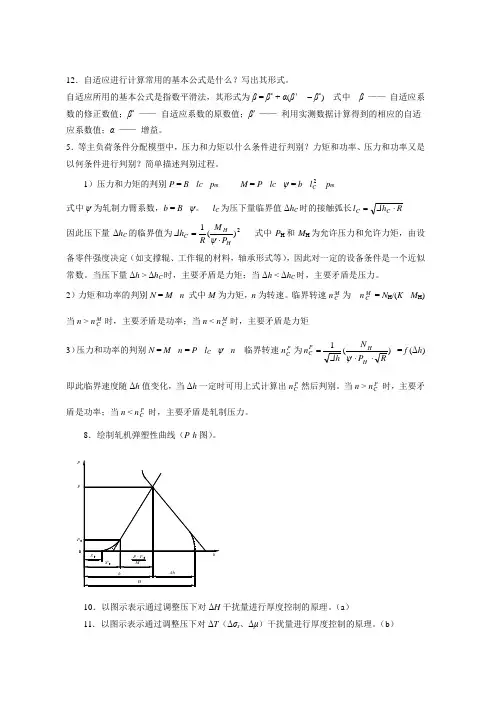
12.自适应进行计算常用的基本公式是什么?写出其形式。
自适应所用的基本公式是指数平滑法,其形式为β = β* + α(β′ – β*) 式中 β —— 自适应系数的修正数值;β* —— 自适应系数的原数值;β′ —— 利用实测数据计算得到的相应的自适应系数值;α —— 增益。
5.等主负荷条件分配模型中,压力和力矩以什么条件进行判别?力矩和功率、压力和功率又是以何条件进行判别?简单描述判别过程。
1)压力和力矩的判别P = B · l C · p m M = P · l C · ψ = b · l 2C · p m式中ψ为轧制力臂系数,b = B · ψ。
l C 为压下量临界值Δh C 时的接触弧长R h Δl C C ⋅= 因此压下量Δh C 的临界值为2)(1HH C P ψM R h Δ⋅=式中P H 和M H 为允许压力和允许力矩,由设备零件强度决定(如支撑辊、工作辊的材料,轴承形式等),因此对一定的设备条件是一个近似常数。
当压下量Δh > Δh C 时,主要矛盾是力矩;当Δh < Δh C 时,主要矛盾是压力。
2)力矩和功率的判别N = M · n 式中M 为力矩,n 为转速。
临界转速n M C 为 n M C = N H /(K · M H ) 当n > n M C 时,主要矛盾是功率;当n < n M C时,主要矛盾是力矩 3)压力和功率的判别N = M · n = P · l C · ψ · n 临界转速n P C 为)(1RP ψN h Δn H HP C⋅⋅= = f (Δh )即此临界速度随Δh 值变化,当Δh 一定时可用上式计算出n P C 然后判别。
当n > n P C 时,主要矛盾是功率;当n < n P C时,主要矛盾是轧制压力。