平均电流模式控制的电流检测变压器的电路设计
- 格式:pdf
- 大小:293.18 KB
- 文档页数:5


反激副边反馈输入欠压过压理论说明1. 引言1.1 概述本文旨在对反激和副边反馈两种电路理论进行说明,并进一步介绍输入欠压和过压的相关理论知识。
这些理论是电源设计领域中至关重要的基础知识,能够影响电路稳定性和设备的正常运行。
通过对这些理论的深入了解和分析,我们可以更好地设计保护措施以提高系统效率和可靠性。
1.2 文章结构本文将按照以下结构展开:第二部分将详细介绍反激电路的原理、设计方法及其在不同应用领域中的应用。
第三部分将探讨副边反馈作为一种控制技术,在电源设计中的作用、原理以及具体应用实例。
第四部分将着重阐述输入欠压现象的定义、原因以及其对系统稳定性的影响,同时介绍相关保护技术和实施方法。
第五部分将介绍过压概念的形成原因、对电路及设备可能造成的损坏及影响,并进一步讨论过压保护技术与应用场景。
最后,文章结尾将总结本文内容并提出未来研究方向和建议。
1.3 目的本文的目的是通过深入分析反激、副边反馈、输入欠压和过压等相关理论知识,为读者提供对这些电路中关键概念和技术的全面理解。
通过学习本文内容,读者将能够更好地应用这些知识于实际工程设计中,以确保电源系统的稳定性、可靠性和高效性。
此外,本文还将探讨未来在这些领域中可能进行的进一步研究方向,并给出相应建议。
2. 反激理论说明:2.1 反激原理:反激(flyback)是一种常见的开关电源拓扑结构,其基本原理是通过切换器的开关操作,将输入直流电压转换为高频交流电压,然后经过变压器进行电压升降,并经过整流和滤波得到所需的输出电压。
在反激拓扑中,将输入直流电源通过一个大电感一次性储能,在开关关闭时,储能元件放出能量给负载。
由于能量被存储并释放,因此该拓扑得名“反激”。
2.2 反激电路设计:反激电路设计需要考虑多个要素以实现稳定的转换效果。
首先需要选择合适的功率开关器件,如MOSFET或IGBT,以实现高效能的能量传输。
其次,在选取变压器时需要根据输入和输出参数进行匹配,并考虑安全间隔以避免击穿等问题。
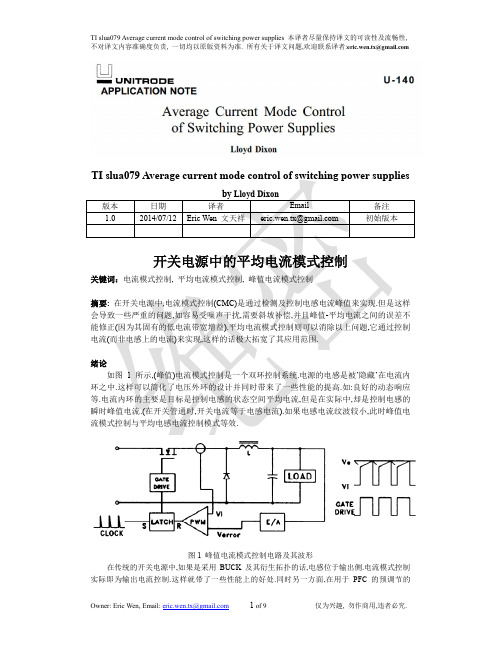
TI slua079 Average current mode control of switching power suppliesby Lloyd Dixon版本日期译者Email 备注1.0 2014/07/12 Eric Wen 文天祥eric.wen.tx@ 初始版本开关电源中的平均电流模式控制关键词:电流模式控制, 平均电流模式控制, 峰值电流模式控制摘要:在开关电源中,电流模式控制(CMC)是通过检测及控制电感电流峰值来实现.但是这样会导致一些严重的问题,如容易受噪声干扰,需要斜坡补偿,并且峰值-平均电流之间的误差不能修正(因为其固有的低电流带宽增益).平均电流模式控制则可以消除以上问题,它通过控制电流(而非电感上的电流)来实现,这样的话极大拓宽了其应用范围.绪论如图1所示,(峰值)电流模式控制是一个双环控制系统.电源的电感是被’隐藏’在电流内环之中.这样可以简化了电压外环的设计并同时带来了一些性能的提高.如:良好的动态响应等.电流内环的主要是目标是控制电感的状态空间平均电流,但是在实际中,却是控制电感的瞬时峰值电流.(在开关管通时,开关电流等于电感电流).如果电感电流纹波较小,此时峰值电流模式控制与平均电感电流控制模式等效.图1 峰值电流模式控制电路及其波形在传统的开关电源中,如果是采用BUCK及其衍生拓扑的话,电感位于输出侧.电流模式控制实际即为输出电流控制.这样就带了一些性能上的好处.同时另一方面,在用于PFC的预调节的BOOST电路中,电感位于输入端,电流模式控制即控制输入电流,这样可以方便地实现输入电流正弦波控制(即PFC功能).峰值电流模式控制产生的问题对噪声敏感.此方法是通过电压外环设定的基准电流值,.当电感电流瞬间值达到预设值时,关断开关管.与预定的电流水平相比,电流斜坡是相对来说很小的.特别是当输入电压Vin是低压的时候.这样的结果是:这种控制方法极易受噪声影响.而在开关管每个导通期间都会产生一个噪声尖峰.部分噪声电压耦合进入控制回路并立即关掉开关管,这样就会导致出现次谐振工作模式(纹波很大).所以对于此种控制方法,PCB Layout及旁边设计至关重要.需要斜坡补偿.当占空比大于0.5时,峰值电流模式天然存在不稳定性,这样会导致次谐波振荡.需要在比较器输入端加入一斜坡补偿(此斜坡/率等于电感电流下降斜率)来消除此种不稳定性.对于BUCK而言,电流下降的斜率为V o/L(V o为常数),所以斜坡补偿度是固定的而且可以计算出来,只是增加了设计的复杂度而已.但是对于高功率因数的BOOST电路,电感下降斜率为(Vin-V o)/L 因此需要补偿的量是随着输入电压变化的,并且变量化是相对比较大的(因为输入电压跟随整流正弦电压).如果采用一个固定的斜率补偿(这个补偿足够多),很多情况下有可能导致过补偿,带来的后果就是性能降低并增加(电流)畸变.峰值与平均电流之间的误差.在传统的BUCK变换器中,这个误差一般不会导致什么十分严重的问题.这是因为电感电流纹波相对于满载时电感平均电流而言比较小,同时电压外环控制也可以消除这种误差.在高功率功率BOOST电路中,这个误差则是十分可怕的.因为它对导致输入电流的畸变.当峰值电流跟随理想的正弦电流时,平均电流则不同.峰值-平均的误差在低电流时更糟糕,特别是在每个输入电流过零时(此时电流变成不连续状态).为了实现较低的电流畸变,峰值-平均之间的电流误差必须越小越好,这样需要一个很大的电感来平滑电流.这个大电感又会让电感电流斜率变得缓慢进一步恶化原来脆弱的抗噪声干扰能力.拓扑问题.传统的峰值电流模式控制实际上是控制电感电流,当它用于类BUCK拓扑时(输出电流即为电感电流)最为有效.对于反激或是BOOST拓扑而言,电感并不是位于输出端而位于输入端,如果采用峰值电流模式控制,实际是一个”错误的”电流控制,这样峰值电流模式控制的优势就消失殆尽.同样的,BOOST电路由于电感位于输入端,这样就可以用来控制输入电流以实现高功率因数.但是BUCK/反激则不能够这样控制,因为电感不在输入侧(这样也会导致’错误的’电流控制).平均电流模式控制峰值电流模式控制是直接比较实际电感电流与设计的电流值(通过电压外环设定),由于这个电流内环增益很低所以并不会十分准确.参考图2,平均电流模式控制可以克服这些缺点,它是通过在电流环里引入一个高增益的集成电流运放来实现.采样电阻Rs上的电压反映出真实的电感电流, 这个差异(或是说电流误差) 通过放大并与一个幅值很大的锯齿波相比较.电流环的增益宽带可以通过优化电流误差放大器周边的补偿网络来实现最佳性能.与峰值电流模式相比,电流环的增益穿越频率fc可以近似相同,但是在低频下平均模式的增益远远大于峰值电流模式.结果是:1.平均电流是与设定电流精确跟随.这对于功率因数校正电流特别重要, 可以使用一个相对小的电感并可以减少3%的谐波失真.实际上, 当变换器进入断续工作模式(此时电流/功率小),此时平均电流模式仍然工作良好.外环电压控制回路是对这种模式的改变是不知道的.2.不再需要斜率补偿,但是由于需要保证稳定性,在开关频率处限制了环路增益.3.抗噪声能力强.当时钟信号开通开关管时,振荡器斜率马上降低到最小值,电压总是远离PWM输入的电流误差值(二个电压值不在同一水平位置).4.平均电流模式控制能够用来感应并控制任何地方的电流.所以它能广泛用于buck/boost/flyback拓扑.图2 平均电流模式控制及波形最优环路设计开关频率处的增益限制:如果PWM输入端二个信号斜率不是关联得当的话,所有开关电源都会呈现出次谐波振荡.峰值电流模式控制下,斜坡补偿可以预防这种不稳定性.平均电流模式控制有类似的问题,但是有更好的解决方案.振荡器斜坡能够有效地产生大量斜坡补偿.对于单极点系统其一个补偿判据是:放大后的电感电流下降斜率不能超过振荡器斜率(这二个信号在PWM的输入端).这个判定标准给开关频率处的电流放大器增益设定了一个上限值,也间接地设定了在交越频率fc处的最大电流环路增益.这是在平均电流模式控制环优化设计中必须首先要考虑的问题.在接下来的例子中,我们假设功率电路级设计完成了,只留下电流误差补偿需要设计.例1: BUCK电路输出电流图2中的简单的BUCK电路的参数如下:CFP暂时忽略掉,零点RFCFZ是远低于开关频率.在接近开关频率时,运放的增益曲线是平坦的.整个电流环只有一个有效极点(来自于电感).电感电流通过Rs采样得到(后面会讲到如何来实现这采样).电感电流波形(包括锯齿波纹波分量)经过运放放大并反向加在比较器输入端.电流电流下降斜率(当开关管关断时)变成了上升斜率,如图2所示.为了避免次谐波振荡,开关管关掉时间内:运放输出斜率必须不能超过振荡器的爬升斜率.如图2所示,运放CA的输出斜率是远小于振荡器的上升斜率,这即表明运放补偿设计离最优化设计还差一点点.斜率计算:Vs是振荡器电压峰峰值,Ts与fs是周期及开关频率.电感电流下降率是通过采样电阻Rs转换成电压并通过运放放大Gca倍.这个值等于等于振荡器的斜率,并决定了误差放大器在开关频率处的增益.设Vs: 5Vp-p,在开关频率处的最大增益为25(或是28db).可以通过设定Rf/RI=25来实现电流误差放大器在fs处的增益设定.小信号下控制到输出的增益选择由下式决定(对于BUCK而言):系统总的电流环开环增益通过1/2式决定,让其值为1(这也即为交越频率处的开环增益):通过1式设定运放的增益,可以保证交越频率永远不会低于系统开关频率的1/6.(这个结果与Middle-brook提出的带斜坡补偿峰值电流模式控制一致).在本例中,交越频率fc=20K(当输入电压Vin=15V,占空比D=0.8时), fc=40K(当输入电压Vin=30V,占空比D=0.4时).如果误差放大器的增益曲线是比较平坦,这时相位裕量在交越频率处将是90度---这远远超出实际需要的裕量,并且增益在低频时并不会比峰值电流模式控制好很多.但是零点RfCfz位于10KHZ,小于最小交越频率,相位裕量减少到63度,同时显著地拓宽了低频增益.(此时积分增益为250K/f).正是由于这个特性,电流环能够快速准确地跟踪平均电流.甚至当比较器实际关掉开关管时,如果达到了电感峰值电流时,这个峰值电流仍可以通过电流放大器可以保证平均电流准确.图3显示了在输入电压30V时满载情况下PWM输入引脚电压以及电感电流启动波形.注意到因为运放增益是按方程1做了最优化设计,所以电感电流下降斜率与振荡器上升斜率相一致.同时,如果运放增益进一步增加的话,不仅仅关断时间斜率会超过振荡器的上升斜率,而且正向偏移也会达到运放的限值,这会对波形进行钳位或是截断.图3 buck变换器波形,最优化增益设计极点RfCfpCfz/(Cfp+Cfz)设定在开关频率处(100KHz).这极点其中的一个作用是用来消除叠加在电流波形上的尖峰噪声,而这些尖峰恰好是峰值电流模式控制的天故.同时锯齿波运放的输出波形同样降低了,特别是高次谐波,同时发生了相移,如图4所示.这零极点对(100KHZ的极点及10KHZ的零点)减少在交越频率处的相位裕量,使其达到45度(这是一个可以接受的相位裕量),如图5所示.图4 BUCK变换器(开关频率处的额外极点)图5 BUCK 变换器波特图由100KHZ 极点导致的运放波形幅值及斜率降低---意味着运放增益可能会超过方程1的最大值.但是注意方程1仅在单极点响应(开关频率fs 处)系统中有效,由于Cfp 的存在导致系统中存在二个有效极点.实验证明,增加运放的增益可能会产生次谐波振荡.断续操作模式. 当负载电流Io 变得很小的时候,电感电流会变成不连续.电流在连续与断续的边界值为:最差工况发生在最大输入电压情况下,此时纹波电流是最大.在本例中,边界值为Io=IL=0.2A,此时输入电压Vin=15V ,Io=0.6A 时输入电压为Vin=30V.在断续工作模式下,如果低于临界模式时,改变输出电流需要较大的占空比变化.换句话说,功率级增益会突然变得很低.同时,连续模式下单极点的90度相位延时特性消失了,所以电路增益曲线是平坦地并且与频率无关.电流环变得更为稳定,但是响应较为缓慢了.在峰值电流模式控制下,如果工作于断续工作模式下,峰值与平均电流之间的误差变得巨大不可以接受.但是平均电流模式控制下,电流误差放大器的高增益特性可以容易地提供大范围的占空比变化来适配负载电流,因此可以维护良好的平均电流调节.参考图2,当电流环为闭环时,在频率低于开关频率fs 时,采样电阻Rs 上的电压Vrs 与设定参考电流值Vcp(来于电压误差放器).电流内环闭环跨导是电压外环的一部分:闭环跨导在开环交越频率fc处(原文上写的是fs,似乎应该为fc)下降并呈现出单极点特性.实例2 Boost调节器输入电流图6所示为1KW离线式BOOST预调节器工作参数如下:在最小输入电压Vin最大输入电流时对应的功率为1080W.输入工频线电流最大值(17A)必须通过设计与电流参考信号限值一致.100KHZ时通过开关管及整流管的最大峰值电流为17A并加上电感电流纹波的一半:图6 Boost预调节器电路当开关管关断时电感电流下降:电感电流下降斜率(V o-Vin)/L最差工况发生在: Vin=Vmin (原文貌似没写清楚)振荡器上升斜率: Vs/Ts=Vs*fs以下求出最大增益:注意式6是与BUCK变换器式1是完全一致的.代入本例得到最大增益Gca=6.58,实际电路中通过Rf/Ri=6.58来设定此增益大小.电流环功率级的小信号增益:控制到输入的增益是(从运放的输出端Vca到采样电阻电压Vrs):同时注意到7式与1式的buck变换器基本上相一致,除了增益是与输出电压V o有关外(V o是常数),1式中是与Vin相关.电流环总的环路增益可以通过6/7式建立,并将其设定为1用来求解交越频率fc:从6式可以得到运放增益的最大值,电流环的交越频率即设定为开关频率的1/6处(16.7KHZ).如前所述,如果一个误差放器的增益是比较平坦的,那么在交越频率处的相位裕度为90度, 这是远远大于实际需要的.所以零点RfCfz设定在最小交越频率的1/2处.即8.33KHZ.这样可以提供一个积分增益为55K/f低频升压变换器(有点不对?).极点RfCfpCfz/(Cfp+Cfz)设定在6倍零点频率(50KHZ)处以消除尖峰噪声.这样,8.33KHZ的零点加上50KHZ的频率一起得到一个40度的相位裕量(在交越频率fc处).启动波形如图7所示,波特图如图8.图7 Boost调节器波形图8 Boost调节器波特图返回看图6,当电流环闭合时,采样电阻电压等于参考电阻上的电压Vrcp.本例中,参考电流源为Icp,电流闭环的电流增益为:闭环电流增益在开环交越频率fc处(原文上写的是fs,似乎应该为fc)下降并呈现出单极点特性.在高功率等级的应用中,电流是跟随着整流母线电压.由于整流后的电压及电流在过零点时会达到尖峰值,此时电感电流变得不连续.即断续工作模式会出现在一个工频周期的一小部分时间.特别是在输入电压高/输入电流最小时或是轻载时.如果是峰值电流模式控制,断续的电感电流会导致比较大的峰值电流-平均电流误差,这样就需要一个较大的电感量来平滑电感电流纹波并且让模式转换处于轻载场合.然而,采用平均电流模式控制可以有效地消除峰值与平均值之间的误差.可以采用小的电感,这样可以实现低成本,小体积,重量轻并同时提高了电流环的带宽.。

TI slua079 Average current mode control of switching power suppliesby Lloyd Dixon版本日期译者Email 备注1.0 2014/07/12 Eric Wen 文天祥eric.wen.tx@ 初始版本开关电源中的平均电流模式控制关键词:电流模式控制, 平均电流模式控制, 峰值电流模式控制摘要:在开关电源中,电流模式控制(CMC)是通过检测及控制电感电流峰值来实现.但是这样会导致一些严重的问题,如容易受噪声干扰,需要斜坡补偿,并且峰值-平均电流之间的误差不能修正(因为其固有的低电流带宽增益).平均电流模式控制则可以消除以上问题,它通过控制电流(而非电感上的电流)来实现,这样的话极大拓宽了其应用范围.绪论如图1所示,(峰值)电流模式控制是一个双环控制系统.电源的电感是被’隐藏’在电流内环之中.这样可以简化了电压外环的设计并同时带来了一些性能的提高.如:良好的动态响应等.电流内环的主要是目标是控制电感的状态空间平均电流,但是在实际中,却是控制电感的瞬时峰值电流.(在开关管通时,开关电流等于电感电流).如果电感电流纹波较小,此时峰值电流模式控制与平均电感电流控制模式等效.图1 峰值电流模式控制电路及其波形在传统的开关电源中,如果是采用BUCK及其衍生拓扑的话,电感位于输出侧.电流模式控制实际即为输出电流控制.这样就带了一些性能上的好处.同时另一方面,在用于PFC的预调节的BOOST电路中,电感位于输入端,电流模式控制即控制输入电流,这样可以方便地实现输入电流正弦波控制(即PFC功能).峰值电流模式控制产生的问题对噪声敏感.此方法是通过电压外环设定的基准电流值,.当电感电流瞬间值达到预设值时,关断开关管.与预定的电流水平相比,电流斜坡是相对来说很小的.特别是当输入电压Vin是低压的时候.这样的结果是:这种控制方法极易受噪声影响.而在开关管每个导通期间都会产生一个噪声尖峰.部分噪声电压耦合进入控制回路并立即关掉开关管,这样就会导致出现次谐振工作模式(纹波很大).所以对于此种控制方法,PCB Layout及旁边设计至关重要.需要斜坡补偿.当占空比大于0.5时,峰值电流模式天然存在不稳定性,这样会导致次谐波振荡.需要在比较器输入端加入一斜坡补偿(此斜坡/率等于电感电流下降斜率)来消除此种不稳定性.对于BUCK而言,电流下降的斜率为V o/L(V o为常数),所以斜坡补偿度是固定的而且可以计算出来,只是增加了设计的复杂度而已.但是对于高功率因数的BOOST电路,电感下降斜率为(Vin-V o)/L 因此需要补偿的量是随着输入电压变化的,并且变量化是相对比较大的(因为输入电压跟随整流正弦电压).如果采用一个固定的斜率补偿(这个补偿足够多),很多情况下有可能导致过补偿,带来的后果就是性能降低并增加(电流)畸变.峰值与平均电流之间的误差.在传统的BUCK变换器中,这个误差一般不会导致什么十分严重的问题.这是因为电感电流纹波相对于满载时电感平均电流而言比较小,同时电压外环控制也可以消除这种误差.在高功率功率BOOST电路中,这个误差则是十分可怕的.因为它对导致输入电流的畸变.当峰值电流跟随理想的正弦电流时,平均电流则不同.峰值-平均的误差在低电流时更糟糕,特别是在每个输入电流过零时(此时电流变成不连续状态).为了实现较低的电流畸变,峰值-平均之间的电流误差必须越小越好,这样需要一个很大的电感来平滑电流.这个大电感又会让电感电流斜率变得缓慢进一步恶化原来脆弱的抗噪声干扰能力.拓扑问题.传统的峰值电流模式控制实际上是控制电感电流,当它用于类BUCK拓扑时(输出电流即为电感电流)最为有效.对于反激或是BOOST拓扑而言,电感并不是位于输出端而位于输入端,如果采用峰值电流模式控制,实际是一个”错误的”电流控制,这样峰值电流模式控制的优势就消失殆尽.同样的,BOOST电路由于电感位于输入端,这样就可以用来控制输入电流以实现高功率因数.但是BUCK/反激则不能够这样控制,因为电感不在输入侧(这样也会导致’错误的’电流控制).平均电流模式控制峰值电流模式控制是直接比较实际电感电流与设计的电流值(通过电压外环设定),由于这个电流内环增益很低所以并不会十分准确.参考图2,平均电流模式控制可以克服这些缺点,它是通过在电流环里引入一个高增益的集成电流运放来实现.采样电阻Rs上的电压反映出真实的电感电流, 这个差异(或是说电流误差) 通过放大并与一个幅值很大的锯齿波相比较.电流环的增益宽带可以通过优化电流误差放大器周边的补偿网络来实现最佳性能.与峰值电流模式相比,电流环的增益穿越频率fc可以近似相同,但是在低频下平均模式的增益远远大于峰值电流模式.结果是:1.平均电流是与设定电流精确跟随.这对于功率因数校正电流特别重要, 可以使用一个相对小的电感并可以减少3%的谐波失真.实际上, 当变换器进入断续工作模式(此时电流/功率小),此时平均电流模式仍然工作良好.外环电压控制回路是对这种模式的改变是不知道的.2.不再需要斜率补偿,但是由于需要保证稳定性,在开关频率处限制了环路增益.3.抗噪声能力强.当时钟信号开通开关管时,振荡器斜率马上降低到最小值,电压总是远离PWM输入的电流误差值(二个电压值不在同一水平位置).4.平均电流模式控制能够用来感应并控制任何地方的电流.所以它能广泛用于buck/boost/flyback拓扑.图2 平均电流模式控制及波形最优环路设计开关频率处的增益限制:如果PWM输入端二个信号斜率不是关联得当的话,所有开关电源都会呈现出次谐波振荡.峰值电流模式控制下,斜坡补偿可以预防这种不稳定性.平均电流模式控制有类似的问题,但是有更好的解决方案.振荡器斜坡能够有效地产生大量斜坡补偿.对于单极点系统其一个补偿判据是:放大后的电感电流下降斜率不能超过振荡器斜率(这二个信号在PWM的输入端).这个判定标准给开关频率处的电流放大器增益设定了一个上限值,也间接地设定了在交越频率fc处的最大电流环路增益.这是在平均电流模式控制环优化设计中必须首先要考虑的问题.在接下来的例子中,我们假设功率电路级设计完成了,只留下电流误差补偿需要设计.例1: BUCK电路输出电流图2中的简单的BUCK电路的参数如下:CFP暂时忽略掉,零点RFCFZ是远低于开关频率.在接近开关频率时,运放的增益曲线是平坦的.整个电流环只有一个有效极点(来自于电感).电感电流通过Rs采样得到(后面会讲到如何来实现这采样).电感电流波形(包括锯齿波纹波分量)经过运放放大并反向加在比较器输入端.电流电流下降斜率(当开关管关断时)变成了上升斜率,如图2所示.为了避免次谐波振荡,开关管关掉时间内:运放输出斜率必须不能超过振荡器的爬升斜率.如图2所示,运放CA的输出斜率是远小于振荡器的上升斜率,这即表明运放补偿设计离最优化设计还差一点点.斜率计算:Vs是振荡器电压峰峰值,Ts与fs是周期及开关频率.电感电流下降率是通过采样电阻Rs转换成电压并通过运放放大Gca倍.这个值等于等于振荡器的斜率,并决定了误差放大器在开关频率处的增益.设Vs: 5Vp-p,在开关频率处的最大增益为25(或是28db).可以通过设定Rf/RI=25来实现电流误差放大器在fs处的增益设定.小信号下控制到输出的增益选择由下式决定(对于BUCK而言):系统总的电流环开环增益通过1/2式决定,让其值为1(这也即为交越频率处的开环增益):通过1式设定运放的增益,可以保证交越频率永远不会低于系统开关频率的1/6.(这个结果与Middle-brook提出的带斜坡补偿峰值电流模式控制一致).在本例中,交越频率fc=20K(当输入电压Vin=15V,占空比D=0.8时), fc=40K(当输入电压Vin=30V,占空比D=0.4时).如果误差放大器的增益曲线是比较平坦,这时相位裕量在交越频率处将是90度---这远远超出实际需要的裕量,并且增益在低频时并不会比峰值电流模式控制好很多.但是零点RfCfz位于10KHZ,小于最小交越频率,相位裕量减少到63度,同时显著地拓宽了低频增益.(此时积分增益为250K/f).正是由于这个特性,电流环能够快速准确地跟踪平均电流.甚至当比较器实际关掉开关管时,如果达到了电感峰值电流时,这个峰值电流仍可以通过电流放大器可以保证平均电流准确.图3显示了在输入电压30V时满载情况下PWM输入引脚电压以及电感电流启动波形.注意到因为运放增益是按方程1做了最优化设计,所以电感电流下降斜率与振荡器上升斜率相一致.同时,如果运放增益进一步增加的话,不仅仅关断时间斜率会超过振荡器的上升斜率,而且正向偏移也会达到运放的限值,这会对波形进行钳位或是截断.图3 buck变换器波形,最优化增益设计极点RfCfpCfz/(Cfp+Cfz)设定在开关频率处(100KHz).这极点其中的一个作用是用来消除叠加在电流波形上的尖峰噪声,而这些尖峰恰好是峰值电流模式控制的天故.同时锯齿波运放的输出波形同样降低了,特别是高次谐波,同时发生了相移,如图4所示.这零极点对(100KHZ的极点及10KHZ的零点)减少在交越频率处的相位裕量,使其达到45度(这是一个可以接受的相位裕量),如图5所示.图4 BUCK变换器(开关频率处的额外极点)图5 BUCK 变换器波特图由100KHZ 极点导致的运放波形幅值及斜率降低---意味着运放增益可能会超过方程1的最大值.但是注意方程1仅在单极点响应(开关频率fs 处)系统中有效,由于Cfp 的存在导致系统中存在二个有效极点.实验证明,增加运放的增益可能会产生次谐波振荡.断续操作模式. 当负载电流Io 变得很小的时候,电感电流会变成不连续.电流在连续与断续的边界值为:最差工况发生在最大输入电压情况下,此时纹波电流是最大.在本例中,边界值为Io=IL=0.2A,此时输入电压Vin=15V ,Io=0.6A 时输入电压为Vin=30V.在断续工作模式下,如果低于临界模式时,改变输出电流需要较大的占空比变化.换句话说,功率级增益会突然变得很低.同时,连续模式下单极点的90度相位延时特性消失了,所以电路增益曲线是平坦地并且与频率无关.电流环变得更为稳定,但是响应较为缓慢了.在峰值电流模式控制下,如果工作于断续工作模式下,峰值与平均电流之间的误差变得巨大不可以接受.但是平均电流模式控制下,电流误差放大器的高增益特性可以容易地提供大范围的占空比变化来适配负载电流,因此可以维护良好的平均电流调节.参考图2,当电流环为闭环时,在频率低于开关频率fs 时,采样电阻Rs 上的电压Vrs 与设定参考电流值Vcp(来于电压误差放器).电流内环闭环跨导是电压外环的一部分:闭环跨导在开环交越频率fc处(原文上写的是fs,似乎应该为fc)下降并呈现出单极点特性.实例2 Boost调节器输入电流图6所示为1KW离线式BOOST预调节器工作参数如下:在最小输入电压Vin最大输入电流时对应的功率为1080W.输入工频线电流最大值(17A)必须通过设计与电流参考信号限值一致.100KHZ时通过开关管及整流管的最大峰值电流为17A并加上电感电流纹波的一半:图6 Boost预调节器电路当开关管关断时电感电流下降:电感电流下降斜率(V o-Vin)/L最差工况发生在: Vin=Vmin (原文貌似没写清楚)振荡器上升斜率: Vs/Ts=Vs*fs以下求出最大增益:注意式6是与BUCK变换器式1是完全一致的.代入本例得到最大增益Gca=6.58,实际电路中通过Rf/Ri=6.58来设定此增益大小.电流环功率级的小信号增益:控制到输入的增益是(从运放的输出端Vca到采样电阻电压Vrs):同时注意到7式与1式的buck变换器基本上相一致,除了增益是与输出电压V o有关外(V o是常数),1式中是与Vin相关.电流环总的环路增益可以通过6/7式建立,并将其设定为1用来求解交越频率fc:从6式可以得到运放增益的最大值,电流环的交越频率即设定为开关频率的1/6处(16.7KHZ).如前所述,如果一个误差放器的增益是比较平坦的,那么在交越频率处的相位裕度为90度, 这是远远大于实际需要的.所以零点RfCfz设定在最小交越频率的1/2处.即8.33KHZ.这样可以提供一个积分增益为55K/f低频升压变换器(有点不对?).极点RfCfpCfz/(Cfp+Cfz)设定在6倍零点频率(50KHZ)处以消除尖峰噪声.这样,8.33KHZ的零点加上50KHZ的频率一起得到一个40度的相位裕量(在交越频率fc处).启动波形如图7所示,波特图如图8.图7 Boost调节器波形图8 Boost调节器波特图返回看图6,当电流环闭合时,采样电阻电压等于参考电阻上的电压Vrcp.本例中,参考电流源为Icp,电流闭环的电流增益为:闭环电流增益在开环交越频率fc处(原文上写的是fs,似乎应该为fc)下降并呈现出单极点特性.在高功率等级的应用中,电流是跟随着整流母线电压.由于整流后的电压及电流在过零点时会达到尖峰值,此时电感电流变得不连续.即断续工作模式会出现在一个工频周期的一小部分时间.特别是在输入电压高/输入电流最小时或是轻载时.如果是峰值电流模式控制,断续的电感电流会导致比较大的峰值电流-平均电流误差,这样就需要一个较大的电感量来平滑电感电流纹波并且让模式转换处于轻载场合.然而,采用平均电流模式控制可以有效地消除峰值与平均值之间的误差.可以采用小的电感,这样可以实现低成本,小体积,重量轻并同时提高了电流环的带宽.。
基于NCP1654的高功率因数电源的设计汪定华【摘要】为了减少电力电子装置引起的谐波污染,加入APFC控制策略是一种有效的方法。
有源功率因数校正电路使输入电流波形跟踪输入正弦交流电压波形,得到较高的功率因数。
文章主要针对APFC控制方法进行讨论,介绍了NCP1654控制电路,并设计了600 W功率电路,实验结果证明了此校正电路的优良性能。
%It is an effective method that active power factor correction (APFC) is added into the power electronic deceives to reduce the harmonic pollution caused by these deceives. Active power faetor correction circuit makes input current waveform track the input sinusoidal AC voltage waveform to get a higher power factor. Control method mainly aimed at APFC are discussed in the paper, NCP1654 control circuit is introduced, and the design of a 600 W power circuit is completed. The experimental results show the good performance of the correct circuit.【期刊名称】《通信电源技术》【年(卷),期】2012(029)003【总页数】3页(P25-27)【关键词】APFC;NCP1654;功率电路【作者】汪定华【作者单位】中国电子科技集团第四十一研究所,安徽蚌埠233006【正文语种】中文【中图分类】TN860 引言随着电力电子技术的发展,各种整流器和带有整流器的电力电子装置在各行各业中大量应用。
平均电流控制模式负载点电源(POL)的控制系统设计摘要:设计了一种基于MAX5060并采用平均电流控制平均电流控制模式的DC/DC 变换器变换器的控制系统。
该变换器为输出电压输出电压可调的负载点电源(POL),采用大信号系统和小信号系统相结合的方法设计控制回路。
详细分析了电源的控制系统设计。
关键词: POL 平均电流控制同步整流BUCK随着CPU等超大规模集成电路的发展,所要求的工作电压在日趋下降,而供电电流则日趋上升,并要求负载点电源(POL)具有更高的动态性能。
在当前的POL电源中,比较通用的主电路与控制策略是:主电路采用同步整流BUCK拓扑或多相交错BUCK电路;在控制策略方面,普遍采用电压型控制和峰值电流型控制。
但是,由于电压控制模式不能控制各个电感的相电流,在多相BUCK中不能实现电流均衡的功能,而在单相BUCK中又需要额外的限流装置,并且对于输入电压的变化又响应较慢,由于这些原因,这种方案的缺点日益突出。
峰值电流控制模式具有快速的负载动态响应,但对于噪声很敏感,并且占空比增加时,需要斜坡补偿。
平均电流控制模式具有较多的优点:在多相变换器中,具有自动电流均衡的能力;采用电感电流作为反馈信号,并且在电流环电流环中引入一个高增益电流误差放大器,电流环的增益带宽可以通过设计这个电流误差放大器的补偿网络而达到最佳性能;与峰值电流控制模式的电流环频带相比,平均电流控制模式的电流环频带几乎与其相同,但低频增益却大很多;平均电感电流能够高度精确地跟踪电流编程信号;不需要斜坡补偿;抗噪声能力强。
本文主要介绍平均电流控制模式同步整流BUCK变换器的控制系统的设计方法,分别从大信号系统和小信号系统分析和设计控制回路,实验结果表明该控制方法切实可行。
1 平均电流控制BUCK变换器的大信号系统分析当系统负载电流发生较大变化时(如从25%额定值变化到100%额定值),系统处在大信号扰动下工作,小信号的假设不再适用,小信号分析法得到的设计结果将与大信号扰动下的系统响应不一致,可能出现的情况是:用小信号法设计的开关转换系统在小信号下是稳定的,但在大信号扰动下系统可能不稳定,因此小信号分析结果不能预测大信号扰动下系统工作的实际特性。
交流输入电压、电流监测电路设计引言电子设备只有在额定电压、电流下才能长期稳定工作,因此需要设计相应的监测、保护电路,防止外部输入电压或者负载出现异常时造成设备损毁。
工频交流电压、电流的大小,通常是利用它的有效值来度量的。
有效值的常用测量方法是先进行整流滤波,得出信号的平均值,然后再采用测量直流信号的方法来检测,最后折算成有效值。
但是由于供电主回路中存在大量的非线性电力、电子设备,如变压器、变频器、电机、UPS、开关电源等,这些设备工作时会产生谐波等干扰。
大型电动设备启动、负载突然变化、局部短路、雷电等异常情况出现时,供电主回路中会出现浪涌。
当这些情况发生时,供电线路上已不是理想的正弦波,采用平均值测量电路将会产生明显的测量误差。
利用真有效值数字测量电路,可以准确、实时地测量各种波形的电压、电流有效值。
下面介绍的监测电路安装于配电箱中,与外围保护电路一起实现对电子设备保护的功能。
真有效值数字测量的基本原理电流和电压的有效值采集电路原理基本相同,下面以电压真有效值为例进行原理分析。
所谓真有效值亦称真均方根值(TRMS)。
众所周知,交流电压有效值是按下式定义的:分析式(1)可知,电路对输入电压u进行“平方→取平均值→开平方”运算,就能获得交流电压的有效值。
因这是由有效值定义式求出的,故称之为真有效值。
若将式(1)两边平方,且令,还可以得到真有效值另一表达式URMS=式(3)中,Avg表示取平均值。
这表明,对u依次进行“取绝对值→平方/除法→取平均值”运算,也能得到交流电压有效值。
式(3)比式(2)更具有实用价值。
由于同时完成两步计算,与分步运算相比,运算器的动态范围大为减小,既便于设计电路,又保证了准确度指标。
美国模拟器件公司(ADI)的AD536、AD637、AD737系列单片真有效值/直流转换器,即采用此原理设计而成。
而凌力尔特公司的单片真有效值/直流转换器LT1966、LT1967、LT1968在RMS-DC的转换过程中采用一个∆∑调制器作除法器,一个简单的极性开关作乘法器。
平均电流模式控制的电流检测变压器的电路设计
摘要
平均电流模式控制(CMC) 要求为控制环路重建电流总波形。
本文为您介绍选择具体变压器所需的一些步骤,以及如何设计一种能够满足终端应用抗变压器饱和需求的电路。
我们使用的模型为功率因数校正(PFC) 拓扑。
分析中将使用一种商用电流检测变压器,用于确定需要的参数,了解如何利用这种信息设计一种可抗饱和的电路。
概述
达到PFC 平均CMC 所需的电流信号重建目标意味着功率脉冲(“开启”时间)期间的电流和空转能量恢复时间(“关闭”时间)期间的电流,都必须包括在所产生的电流信号中。
在高功率PFC 下,电阻传感器系统的损耗极高,因此需要使用电流变压器。
在分析中,我们对PFC 电路中所需的这种电流变压器设计进行了论证,因为相比标准的正向转换器它的要求更加严格。
分析
图1 显示了本次讨论所用的模型
表1 列出了用于正确地识别这种转换器所使用的两个电流变压器的具体详情。
IinLpk 电流表示所需电流变压器具有约20 安培的一次电流处理能力和100 kHz 的开关频率。
一个具有20 安培一次电流处理能力和50 kHz 到1 MHz 频率范围的PA 1005.100 电流变压器,可以满足这种设计的要求。
表1 PFC 设计所需的参数。