基于51单片机的红外遥控的开关的设计
- 格式:pdf
- 大小:924.53 KB
- 文档页数:29

基于STC89C51单片机的红外遥控智能家居系统设计1. 本文概述阐述问题:我会指出当前智能家居系统中存在的问题,以及为什么需要基于STC89C51单片机的解决方案。
提出解决方案:接着,我会概述STC89C51单片机在智能家居系统中的作用以及红外遥控技术的优势。
文章结构:我会简要介绍文章的结构,说明接下来的章节将如何展开。
随着科技的不断进步,智能家居系统逐渐成为现代家庭生活的一部分,它们通过提高居住环境的舒适性、安全性和便利性,极大地提升了人们的生活质量。
现有的智能家居系统在集成性、成本效益和用户交互体验方面仍存在不足。
为了解决这些问题,本文提出了一种基于STC89C51单片机的红外遥控智能家居系统设计方案。
STC89C51单片机以其较低的成本、丰富的功能和良好的稳定性,成为实现智能家居控制的理想选择。
结合红外遥控技术,该系统不仅能够实现远程控制家电设备,还能通过简单的编程实现个性化的家居自动化场景,从而为用户提供更加灵活和智能的居住体验。
本文将首先介绍智能家居系统的基本概念和发展趋势,然后详细阐述STC89C51单片机的工作原理及其在智能家居系统中的应用。
接着,本文将描述红外遥控技术的原理,并展示如何将其与STC89C51单片机结合,实现对家居设备的智能控制。
本文将通过一个实际的系统设计案例,展示该设计方案的可行性和实用性。
2. 相关技术综述单片机技术:介绍STC89C51单片机的基本特性,包括其处理能力、内存、IO端口等,并说明其在智能家居系统中的应用优势。
红外通信技术:概述红外通信的基本原理,包括信号的调制、传输和解码过程,以及红外技术在遥控设备中的优势。
智能家居系统架构:描述智能家居系统的一般架构,包括控制中心、通信协议、传感器和执行器等组成部分。
现有智能家居解决方案:简要回顾市场上已有的智能家居解决方案,分析它们的特点和局限性。
设计挑战与创新点:讨论在设计基于STC89C51单片机的红外遥控智能家居系统时面临的技术挑战,以及本设计相对于现有技术的创新之处。

天津职业大学二○一五~二○一六学年第1学期电子信息工程学院通信系统综合实训报告书课程名称:通信系统综合实训班级:通信技术(5)班学号:1304045640 1304045641 1304045646姓名:韩美红季圆圆陈真真指导教师:崔雁松2015年11月17日一、任务要求利用C51单片机设计开发一套红外线收发、显示系统。
具体要求:●编写相关程序(汇编、C语言均可);●用Proteus绘制电路图并仿真实现基本功能;●制作出实物二、需求分析(系统的应用场景、环境条件、参数等)现在各种红外线技术已经源源不断进入我们的生活中,在很多场合发挥着作用。
机场、宾馆、商场等的自动门,会在人进出时自动地开启和关闭。
原来,在自动门的一侧有一个红外线光源,发射的红外线照射到另一侧的光电管上,红外线是人体察觉不到的。
当人走到大门口,身体挡住红外线,电管接收不到红外线了。
根据设计好的指令,触发相应开关,就把门打开了。
等人进去后,光电管又可以接到红外线,恢复原来的线路,门又会自动关闭。
因此这种光电管被称为“电眼”,在许多自动控制设备中大显身手。
在家庭中,许多电子设备如彩色电视、空调、冰箱和音响等,都使用了各种“红外线遥控器”。
利用它我们可以非常方便的转换电视频道或设定空调的温度档次。
三、概要设计(系统结构框图/系统工作说明流程图)红外线收发、显示系统硬件由以下几部分组成:红外遥控器,51单片机最小系统,接收放大器一体集成红外接收头,LED灯显示电路。
红外线接收是把遥控器发送的数据(已调信号)转换成一定格式的控制指令脉冲(调制信号、基带信号),是完成红外线的接收、放大、解调,还原成发射格式(高、低电位刚好相反)的脉冲信号。
这些工作通常由一体化的接收头来完成,输出TTL兼容电平。
最后通过解码把脉冲信号转换成数据,从而实现数据的传输。
红外遥控系统电路框图四、详细设计(Proteus电路图、程序流程图、源程序清单)1)Proteus电路图:2)程序流程图:程序是首先初始化红外接收端口,然后检测是否接收红外信号,如果接收到红外信号就调用接收子程序,然后就通过L 额度LED 显示当前按键的结果,如图所示:程序流程图3)源程序清单:#include<reg51.h> //头文件#define uchar unsigned char //这里用"uchar"代替"unsigned char","uchar"用来定义无符号字符型数。
51单片机设计的红外线遥控器电路图及工作原理你家里是否有一个电视机遥控器或者空调机遥控器呢?你是否也想让它遥控其他的电器甚至让它遥控您的电脑呢?那好,跟我一起做这个“红外遥控解码器”。
该小制作所需要的元件很少:单片机TA89C2051一只,RS232接口电平与TTL电平转换心片MAX232CPE 一只,红外接收管一只,晶振11.0592MHz,电解电容10uF4只,10uF 一只,电阻1K1个,300欧姆左右1个,瓷片电容30P2个。
发光二极管8个。
价钱不足20元。
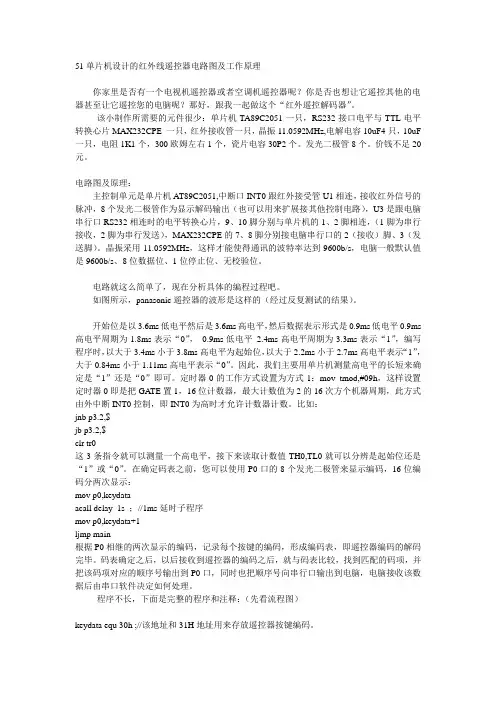
电路图及原理:主控制单元是单片机AT89C2051,中断口INT0跟红外接受管U1相连,接收红外信号的脉冲,8个发光二极管作为显示解码输出(也可以用来扩展接其他控制电路),U3是跟电脑串行口RS232相连时的电平转换心片,9、10脚分别与单片机的1、2脚相连,(1脚为串行接收,2脚为串行发送),MAX232CPE的7、8脚分别接电脑串行口的2(接收)脚、3(发送脚)。
晶振采用11.0592MHz,这样才能使得通讯的波特率达到9600b/s,电脑一般默认值是9600b/s、8位数据位、1位停止位、无校验位。
电路就这么简单了,现在分析具体的编程过程吧。
如图所示,panasonic遥控器的波形是这样的(经过反复测试的结果)。
开始位是以3.6ms低电平然后是3.6ms高电平,然后数据表示形式是0.9ms低电平0.9ms 高电平周期为1.8ms表示“0”,0.9ms低电平2.4ms高电平周期为3.3ms表示“1”,编写程序时,以大于3.4ms小于3.8ms高电平为起始位,以大于2.2ms小于2.7ms高电平表示“1”,大于0.84ms小于1.11ms高电平表示“0”。
因此,我们主要用单片机测量高电平的长短来确定是“1”还是“0”即可。
定时器0的工作方式设置为方式1:mov tmod,#09h,这样设置定时器0即是把GATE置1,16位计数器,最大计数值为2的16次方个机器周期,此方式由外中断INT0控制,即INT0为高时才允许计数器计数。
目录第一章设计简介 (2)第二章系统方案 (2)一、设计方案对比 (2)二、方案设计 (4)第三章硬件设计 (4)一、红外遥控器 (4)二、红外接收模块部分 (6)第四章软件设计 (7)一、红外遥控器软件设计 (7)二、红外接收模块软件设计 (10)三、程序代码 (10)第五章测试及分析 (10)第六章结论 (10)第七章参考文献 (11)附录一(程序代码): (12)第一章设计简介本设计分为红外遥控器与红外接收模块两部分。
红外遥控器包括矩阵键盘、增强型51单片机(STC11L04E)、红外发射电路组成。
单片机扫描矩阵键盘后,将按键状态进行信源编码与信道编码,载波(38k脉冲)后由红外发射器发射。
红外接收模块部分由传统51单片机、数码管、一体化红外接收头组成。
一体化红外接收头将信号进行限幅放大、带通滤波、解调、积分、整形后输出解调信号至单片机,并由单片机输出解调信号。
第二章系统方案一、设计方案对比红外遥控器部分2.1.1 主控芯片方案一:HT6222方案二:STC11L04E分析:传统红外遥控器芯片HT6222具有性价比高、功能强大、稳定可靠、使用简单等特点,但该芯片难以零购。
STC11L04E为增强型51单片机,控制灵活(载波频率可调、通信协议可变更、用户码可变换)、价格较HT6222稍贵。
STC11L04E最大的特别是低功耗,功作电压低3.3V,易于应用于移动设备。
结论:由于STC11L04E单片机的灵活性以及学习性(可增强我们对一个完整通信系统的理解)。
因此我们采用方案二。
2.1.2 矩阵键盘方案一:3*6*2.5 贴片轻触开关方案二:6*6*6 直插轻触开关分析:3*6*2.5贴片轻触开关虽然体积小巧、美观,但与6*6*6直插轻触开关对比,在制板布线上较繁锁。
结论:综上,我们采用6*6*6直插轻触开关,使得整体布线简单,可布单面版,简化制板流程。
2.1.3电源模块方案一:钮扣电池CR2032方案二:可充电锂电池18650分析:可充电锂电池18650容量大,节能环保(可多次利用),但体积大。
单片机红外控制发射器设计【详细】摘要随着社会的发展、科技的进步以及人们生活水平的逐步提高,各种方便于生活的遥控系统开始进入了人们的生活。
传统的遥控器采用专用的遥控编码及解码集成电路,这种方法虽然制作简单、容易,但由于功能键数及功能受到特定的限制,只实用于某一专用电器产品的应用,应用范围受到限制。
而采用单片机进行遥控系统的应用设计,具有编程灵活多样、操作码个数可随便设定等优点。
本设计主要应用了A T89C2051单片机作为核心,综合应用了单片机中断系统、定时器、计数器等知识,应用红外光的优点。
遥控操作的不同,遥控发射器通过对红外光发射频率的控制来区别不同的操作。
遥控接收器通过对红外光接收频率的识别,判断出控制操作,来完成整个红外遥控发射、接收过程。
其优点硬件电路简单,软件功能完善,性价比较高等特点,具有一定的使用和参考价值。
关键词:单片机,红外遥控,中断,定时,计数,频率AbstractWith the development of our society and the gradual improvement of science and technology, various kinds of help remote control systems have began to enter people’s life. The traditional remote controllers adopt special remote control code and decode integrated circuits, though this kind of method is simply and easily, it is only the practical application of some certain special electric equipments because of the counted functional keys is counted and the restricted function, so the range of application is limited. But the remote controllers which adopt the microprocessors have many advantages such as flexible operating and unceremonious manipulative keys.The design has used A T89C2051 microprocessor as core, integratively apply the interruptive system, timer , counter ,etc. mainly to design originally and also take the advantage of the infrared light. The remote control launcher distinguishes different operation through the control on frequency of infrared emission of light. The remote control receiver judges control operation by adopting the discerned frequency of the received infrared light to finish the whole launching and receiving course.Its advantage is that the hardware circuit is simple, the software is with perfect function, have certain use and reference valueKeywords:Microprocessor, Infrared remote control,Interrupt,Timing,Counting,Frequency目录摘要 (I)Abstract (I)1 绪论 (5)1.1 单片机的产生与发展 (5)1.2红外通信技术概述 (3)1.2.1红外概述 (3)1.2.2 选择红外遥控的原因 (3)1.2.3红外的简单发射接收原理 (4)2.1 设计目的与原理 (4)2.2单片机红外遥控发射器设计原理 (4)2.3 单片机红外遥控接收器设计原理 (5)3系统硬件电路设计 (6)3.1有关A T89C2051单片机的介绍 (6)3.1.1简介 (6)3.1.2引脚介绍 (6)3.1.3 A T89C2051单片机的主要组成部分 (8)3.2定时器/计数器 (9)3.2.1主要特性 (9)3.2.2定时/计数器0和1的控制和状态寄存器 (10)3.2.3 T0和T1的4种工作方式 (12)3.3独立式按键结构 (12)3.4低功耗控制电路 (13)3.4.1低功耗的实现方法 (13)3.4.2 掉电保护和低功耗的设计 (13)3.5 CPU时钟电路 (16)3.6 复位电路 (17)3.6.1复位状态 (17)3.6.2 复位电路 (17)3.7 红外发射电路的设计 (18)3.8 红外接收电路的设计 (19)3.9 完整的系统电路设计图 (20)4 系统软件设计 (20)4.1遥控发射器程序设计 (20)4.1.1程序总体结构 (20)4.1.2 伪指令和初始化程序 (22)4.1.3键盘扫描程序 (24)4.1.4 中断服务程序 (25)4.2 遥控接收器程序设计 (27)4.2.1 程序总体结构 (27)4.2.2 初始化程序 (29)4.2.3 计数值比较程序 (30)4.2.4 定时器1中断服务程序 (30)5 总结与展望 (31)致谢 (32)参考文献 (33)附录1 (35)附录2 (37)1 绪论1.1单片机的产生与发展为适应社会发展的需要,微型计算机不断的更新换代,新产品层出不穷。
基于51单片机的红外通信设计报告研究方案:基于51单片机的红外通信设计报告摘要:本研究旨在通过对基于51单片机的红外通信的研究与实践,对红外通信协议进行优化和改进,提高通信的可靠性和稳定性。
通过设计红外发射器和接收器,并利用51单片机进行编程控制,实现了红外信号的发送与接收。
在实验中,采集了一系列数据,通过对这些数据的整理和分析,发现了现有研究成果的不足之处,并提出了一种新的观点和方法,为解决实际问题提供了有价值的参考。
1. 引言红外通信是一种常见的无线通信方式,具有传输速度快、安全可靠等优点,在家庭电器控制、遥控玩具、无线数据传输等领域广泛应用。
本研究基于51单片机进行红外通信协议的设计与实践,旨在优化和改进红外通信的性能。
2. 研究设计2.1 硬件设计2.1.1 红外发射器设计通过使用红外发光二极管作为发射器,并连接到51单片机的IO口,控制IO口的高低电平来实现对发射器的开关控制。
2.1.2 红外接收器设计通过使用红外接收头作为接收器,并将其连接到51单片机的IO口,通过检测接收器的信号电平变化来判断接收到的红外信号。
2.2 软件设计2.2.1 红外信号解析与发送在51单片机上编写红外信号解析与发送的程序,通过对输入信号的解析,将需要发送的红外信号编码成特定协议的数据帧,再通过IO口的控制将数据帧发送出去。
2.2.2 红外信号接收与解析在51单片机上编写红外信号接收与解析的程序,通过IO口的状态变化检测,获取红外接收器接收到的信号,并对接收到的信号进行解析,还原成原始数据。
3. 实验与调查情况在本研究中,我们通过实验和调查采集了一系列的数据来评估所设计的红外通信系统的性能。
3.1 实验设置我们设置了一个包含发射器和接收器的实验平台。
通过按下遥控器上的按键,触发发射器发送特定红外信号,在接收器上探测到红外信号,并通过51单片机进行信号解析。
3.2 数据采集与分析通过对实验中采集到的数据进行整理和分析,我们可以得到以下结论:(1)在传输距离较近的情况下,信号的可靠性和稳定性良好。
文章标题:基于51单片机的步进电机红外控制系统的设计引言在现代科技发展迅速的时代,控制系统已经被广泛应用于各个领域。
其中,基于51单片机的步进电机红外控制系统的设计,不仅在工业领域有着重要的作用,同时也在家电领域、智能家居等方面得到了广泛的应用。
本文将从步进电机控制系统的设计原理、红外控制的基本概念以及基于51单片机的系统设计方案等方面展开深入探讨。
一、步进电机控制系统的设计原理步进电机是一种将电脉冲信号转换为机械位移的执行元件,其控制系统设计原理是核心。
以步进电机为执行元件的控制系统通常包括电脉冲发生电路、电流驱动电路、位置控制逻辑电路以及接口电路等模块。
在系统设计中,需要考虑步进电机的类型、工作方式、转动角度以及控制精度等因素,以选择合适的控制方案和相关元器件。
针对步进电机的控制系统设计,首先需要从硬件电路和软件控制两个方面进行综合考虑。
硬件方面需要设计合适的脉冲发生电路和驱动电路,并根据具体场景考虑相关的接口电路,以实现步进电机的控制和驱动。
而软件控制方面,则需要编写相应的控制程序,使得系统能够根据具体的控制要求进行精准的控制和调节。
二、红外控制的基本概念红外控制是一种常见的无线遥控技术,通过使用红外线传输信号来实现对设备的控制。
通常包括红外发射器和红外接收器两个部分,发射器将控制信号转换成红外信号发送出去,接收器接收红外信号并将其转换成电信号进行处理。
在实际应用中,红外控制技术已经被广泛应用于各种家电遥控器、智能家居系统以及工业自动化领域。
红外控制的基本原理是在发射器和接收器之间通过红外线进行双向通信,通过调制解调的方式进行信号的传输和解析。
设计基于红外控制的步进电机系统需要考虑红外信号的发射和接收过程,以及相关的解析算法和信号处理。
信号的稳定性、抗干扰能力以及传输距离等也是需要考虑的重要因素。
三、基于51单片机的系统设计方案在步进电机红外控制系统的设计中,选择合适的控制芯片和处理器是至关重要的。
6511青岛农业大学毕业论文(设计)任务书论文(设计)题目简易智能红外遥控器的设计要求完成时间论文(设计)内容(需明确列出研究的问题):本设计要求设计一简易智能红外遥控器,需要解决以下问题:1、熟悉红外遥控器的工作原理;2、掌握红外通信的编解码原理及至少一种串行通信数据校验算法;3、实现一个遥控器对至少2台家电设备的控制;4、绘制系统电气原理图及PCB图;5、画出系统的软件流程图并编写系统程序;6、尽量做出样机并完成系统调试。
资料、数据、技术水平等方面的要求:1、查阅至少10篇以上与课题相关资料,至少有两篇是英文文献;2、原理图的绘制要求规范;3、绘制系统PCB图;4、编写并调试系统程序;5、完成实物演示;6、独立完成论文;7、论文要求打印。
指导教师签名:年月日目录摘要 (I)ABSTRACT (II)一. 绪论 (1)1.1课题研究的背景 (1)1.2课题研究的目的 (1)1.3课题研究的内容 (1)二. 系统概述 (3)2.1国外发展概况 (3)2.2国内发展概况 (4)三. 智能红外遥控器的硬件设计 (5)3.1主要元器件介绍 (5)3.1.1 STC系列单片机介绍 (5)3.1.2 红外发光二极管 (6)3.1.3 红外接收头 (7)3.1.4 E2PROM-AT24C02的应用 (8)3.2系统设计思路 (12)3.2.1 红外遥控器组成 (14)3.2.2 红外遥控器的框图 (15)3.3硬件电路设计 (15)3.3.1 发射端硬件电路 (15)3.3.2 接收端硬件电路 (16)四. 智能红外遥控器的软件设计 (18)4.1编解码约定与存储 (18)4.1.1 发射编码部分 (18)4.1.2 接收解码部分 (21)4.1.3 存储部分 (23)4.2子程序介绍 (25)4.2.1 发射子程序 (25)4.2.2 接收子程序 (29)五. 总结与展望 (33)5.1总结 (33)5.2本文的不足 (33)参考文献 (34)致谢 (35)附录一原理图 (36)附录二程序 (37)简易智能红外遥控器的设计摘要红外遥控技术能给人们日常生活带来更加人性化的关怀和体贴,同时还兼具节能与安防等辅助功能,相对应的红外遥控器与人们的日常生活息息相关,是人们使用频率最高的智能化设备。
基于51单片机的红外遥控器设计近年来,随着智能家居的兴起,红外遥控器在我们的生活中扮演着越来越重要的角色。
本文将基于51单片机,设计一个简单的红外遥控器。
首先,我们需要了解红外遥控器的工作原理。
红外遥控器使用红外线来传输指令。
当用户按下遥控器上的按键时,红外发射器发射一个特定的红外信号。
接收器接收到这个信号后,将其转换成电信号,并将其发送到电子设备中,实现对设备的控制。
接下来,我们需要选择合适的红外发射器和接收器。
常见的红外发射器有红外LED,常见的红外接收器有红外接收头。
在选择红外发射器和接收器时,要根据其工作频率、传输距离、灵敏度等因素进行选择。
在本设计中,我们选择了工作频率为38kHz的红外发射器和接收器。
接下来,我们需要设计电路,并进行程序开发。
首先,我们需要连接红外发射器和接收器到51单片机上。
红外发射器的一个引脚连接到51单片机的I/O口,另一个引脚连接到正极电源,第三个引脚连接到电源的接地端。
红外接收器的输出引脚连接到51单片机的I/O口,电源和接地端分别连接到正负电源。
接下来,我们需要编写程序。
首先,我们需要设置51单片机的I/O 口为输入或输出。
然后,我们需要编写程序来发送红外信号。
我们可以使用PWM技术来模拟红外信号的脉冲。
当用户按下遥控器上的按键时,我们可以发送一个特定的脉冲序列,来控制电子设备。
同时,我们还需要编写程序来接收红外信号。
当红外接收器接收到红外信号时,会输出一个特定的电平信号。
我们可以使用外部中断来检测这个信号,并进行相应的处理。
在程序开发过程中,我们需要注意红外信号的协议。
常见的红外信号协议有NEC、SONY等。
我们需要根据所使用的红外接收器的协议来编写相应的程序。
最后,我们需要测试代码的功能和稳定性。
可以通过连接电子设备,按下遥控器上的按键,来测试红外信号的发送和接收功能。
如果一切正常,我们的红外遥控器设计就完成了。
总结起来,基于51单片机的红外遥控器设计是一个简单而有趣的项目。
目录1第一章 绪论..............................................................................11.1 选题的目的与意义 ................................................................1.2 本课题在国内外的发展现状及趋势 ..................................................121.3 本课题要解决的主要问题 ..........................................................3第二章 系统设计方案 .....................................................................32。
1 系统结构与功能 ................................................................32.2 总体系统框图 .....................................................................42。
3 开关的选择 .....................................................................2.4 显示方式选择 .....................................................................452.5 时钟的实现及单片机的选择 ........................................................52。
6 按键控制部分的实现 ............................................................6第三章 主要元器件原理及其应用 ..........................................................63。
基于51单片机的红外遥控本讲内容:介绍红外遥控的知识,通过例程展示红外遥控程序的编写方法。
红外线简介:在光谱中波长自760nm至400um的电磁波称为红外线,它是一种不可见光。
目前几乎所有的视频和音频设备都可以通过红外遥控的方式进行遥控,比如电视机、空调、影碟机等,都可以见到红外遥控的影子。
这种技术应用广泛,相应的应用器件都十分廉价,因此红外遥控是我们日常设备控制的理想方式。
接收头输出的波形正好和遥控芯片输出的相反。
在这里红外通信采用NEC协议,它的特征如下:信号调制红外遥控信号接收管接口电路:红外信号发射电路 红外信号接收电路例程:红外遥控信号发射:/*****************红外通信——发射*******************单片机型号:STC89C52RC*开发环境:KEIL*名称:红外通信发射*功能:按下按键S4,S5,S6,S8,S9,S10,S11,S13,S14发射对应键值,可以与红外通信——接收程序配套使用***************************************************/#include <REG51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int#define SBM 0x80 //识别码#define m9 (65536-8294) //约9mS#define m4_5 (65536-4147) //约4.5mS#define m1_6 (65536-1521) //约1.65mS#define m_65 (65536-599) //约0.65mS#define m_56 (65536-516) //约0.56mS#define m40 (65536-36864) //约40mS#define m56 (65536-51610) //56mS#define m2_25 (65536-2074) //约2.25mSconst uchar TabHL1[9]={0x0c,0x18,0x5e,0x08,0x1c,0x5a,0x42,0x52,0x4a};sbit IR=P1^5; //定义发射引脚sbit BEEP=P2^3;void keyscan();void ZZ(uchar x);void Z0(uchar temp);void TT0(bit BT,uint x);void delay(int In,int Out);/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:主函数┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void main(void){TMOD=0x01; //T0 16位工作方式IR=1; //发射端口常态为高电平while(1){keyscan();}}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:发送主程序┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void ZZ(uchar x){TT0(1,m9); //高电平9mSTT0(0,m4_5); //低电平4.5mS/*┈发送4帧数据┈*/Z0(SBM);Z0(~SBM);Z0(x);Z0(~x);/*┈┈结束码┈┈*/TT0(1,m_65);TT0(0,m40);}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:单帧发送程序入口参数:1帧数据┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void Z0(uchar temp){uchar v;for (v=0;v<8;v++) //循环8次移位{TT0(1,m_65); //高电平0.65mSif(temp&0x01) TT0(0,m1_6); //发送最低位else TT0(0,m_56);temp >>= 1; //右移一位}}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:38KHz脉冲发射 + 延时程序入口参数:(是否发射脉冲,延时约 x (uS))┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/void TT0(bit BT,uint x){TH0=x>>8; //输入T0初始值TL0=x;TF0=0; //清0TR0=1; //启动定时器0if(BT==0)while(!TF0);//BT=0时不发射38KHz脉冲只延时;BT=1发射38KHz脉冲且延时;else while(1) //38KHz脉冲,占空比5:26{IR = 0;if(TF0)break;if(TF0)break;IR=1;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;}TR0=0; //关闭定时器0TF0=0; //标志位溢出则清0IR =1; //脉冲停止后,发射端口常态为高电平}void keyscan() //按键扫描函数{uchar buffer;/***************************************************/P3=0xfe; //扫描S3,S4,S5,S6;buffer=P3;buffer=buffer & 0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xee:{;}break;case 0xde:{ZZ(TabHL1[0]);}break;case 0xbe:{ZZ(TabHL1[1]);}break;case 0x7e:{ZZ(TabHL1[2]);}break;}while(buffer != 0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}/****************************************************/ P3=0xfd; //扫描S8,S9,S10,S11buffer=P3;buffer=buffer & 0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xed:{ZZ(TabHL1[3]);}break;case 0xdd:{ZZ(TabHL1[4]);}break;case 0xbd:{ZZ(TabHL1[5]);}break;case 0x7d:{ZZ(TabHL1[6]);}break;}while(buffer!=0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}/****************************************************/ P3=0xfb; //扫描S13,S14,S15,S16buffer=P3;buffer=buffer&0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xeb:{ZZ(TabHL1[7]);}break;case 0xdb:{ZZ(TabHL1[8]);}break;}while(buffer!=0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}}void delay(int In,int Out) //定义延时函数{int i,j;for(i=0;i<In;i++){for(j=0;j<Out;j++){;}}}红外遥控信号接收:/*****************红外通信--接收*******************单片机型号:STC89C52RC*开发环境:KEIL*功能:在液晶LCD1602上显示接收到的数值*************************************************/#include<reg52.h>#define LCD_Data P0#define Busy 0x80sbit IR=P3^2;sbit LCD_RS=P1^0;sbit LCD_RW=P1^1;sbit LCD_E=P2^5;void TIM0init(void);void EX0init(void);void SYSinit(void);void delay(int In,int Out);void Delay5Ms(void);void Ir_work(void);void Ircordpro(void);void WriteDataLCD(unsigned char WDLCD);void WriteCommandLCD(unsigned char WCLCD,BuysC);unsigned char ReadDataLCD(void);unsigned char ReadStatusLCD(void);void LCDInit(void);void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData);void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData); void Info_display(void);bit IRpro_ok;bit IR_ok;unsigned char IRcord[4];unsigned char IRdata[33];unsigned char codedofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};unsigned char irtime;unsigned char speed_num=0;unsigned char codemb_table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};unsigned char code welcome[]={"YOU ARE WELCOME"};unsigned char code ir_reve[]={"IR_RECEIVE: "};/*******************5ms延时函数*********************/void Delay5Ms(void){unsigned int TempCyc=3552;while(TempCyc--);}void delay(int In,int Out){int i,j;for(i=0;i<In;i++){for(j=0;j<Out;j++){;}}}/***********************写数据函数***********************/ void WriteDataLCD(unsigned char WDLCD){ReadStatusLCD();LCD_Data=WDLCD;LCD_RS=1;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/**********************写指令函数************************/ void WriteCommandLCD(unsigned char WCLCD,BuysC){if(BuysC)ReadStatusLCD();LCD_Data=WCLCD;LCD_RS=0;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/***********************读状态函数************************/ unsigned char ReadStatusLCD(void){LCD_Data=0xFF;LCD_RS=0;LCD_RW=1;LCD_E=0;LCD_E=0;LCD_E=1;while(LCD_Data & Busy);return(LCD_Data);}/************************LCD初始化************************/ void LCDInit(void){LCD_Data=0;WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,1);WriteCommandLCD(0x08,1);WriteCommandLCD(0x01,1);WriteCommandLCD(0x06,1);WriteCommandLCD(0x0C,1);}/*******************按指定位置显示一个字符******************/void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData){Y&=0x1;X&=0xF;if(Y)X|=0x40;X|=0x80;WriteCommandLCD(X,0);WriteDataLCD(DData);}/*******************按指定位置显示一串字符******************/void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData) {unsigned char ListLength;ListLength=0;Y&=0x1;X&=0xF;while(DData[ListLength]>=0x20){if(X<=0xF){DisplayOneChar(X,Y,DData[ListLength]);ListLength++;X++;}}}/***********************定时器0初始化***********************/void TIM0init(void){TMOD=0x02;TH0=0x00;TL0=0x00;ET0=1;TR0=1;}/**********************外部中断0初始化**********************/void EX0init(void){IT0=1;EX0=1;EA=1;}/*************************系统初始化*************************/void SYSinit(void){TIM0init();EX0init();LCDInit();}/********************红外信号接收相关函数********************/void Ir_work(void){switch(IRcord[2]){case 0x0C:{DisplayOneChar(12,1,0x31);}break;case 0x18:{DisplayOneChar(12,1,0x32);}break;case 0x5e:{DisplayOneChar(12,1,0x33);}break;case 0x08:{DisplayOneChar(12,1,0x34);}break;case 0x1c:{DisplayOneChar(12,1,0x35);}break;case 0x5a:{DisplayOneChar(12,1,0x36);}break;case 0x42:{DisplayOneChar(12,1,0x37);}break;case 0x52:{DisplayOneChar(12,1,0x38);}break;case 0x4a:{DisplayOneChar(12,1,0x39);}break;default:break;}}void Ircordpro(void){unsigned char i,j,k;unsigned char cord,value;k=1;for(i=0;i<4;i++){for(j=1;j<=8;j++){cord=IRdata[k];if(cord>7)value|=0x80;if(j<8){value>>=1;}k++;}IRcord[i]=value;value=0;}IRpro_ok=1;}/********************红外信号接收相关函数********************/ void main(void){SYSinit();delay(5,100);DisplayListChar(0,0,welcome);DisplayListChar(0,1,ir_reve);while(1){if(IR_ok){Ircordpro();IR_ok=0;}if(IRpro_ok){Ir_work();}}}/********************定时器0中断处理函数********************/ void tim0_isr (void) interrupt 1 using 1{irtime++;}/*******************外部中断0中断处理函数*******************/ void EX0_ISR (void) interrupt 0{static unsigned char i;static bit startflag;if(startflag){if(irtime<63&&irtime>=33)i=0;IRdata[i]=irtime;irtime=0;i++;if(i==33){IR_ok=1;i=0;}}else{irtime=0;startflag=1;}}。
第1章红外解码系统分析第1节设计要求整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。
红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。
红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。
设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。
第2节总体设计方案2.1 方案论证驱动与开关方案一:采用晶闸管直接驱动。
其优点是体积小,电路简单,外围元件少。
但控制电流小,大电流晶闸管成本高,并且隔离性能差。
方案二:采用三极管驱动继电器。
其体积大,外围元件多。
优点是控制电流大,隔离性能好。
根据实际情况,拟采用方案二。
2.2 总体设计框图经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。
整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。
确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲与T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。
红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。
然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。
图1-1 电路设计整体框图第2章红外解码硬件电路设计第1节单片机及其硬件电路设计1.1 单片机的介绍AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。
摘要很多电器都采用红外遥控,那么红外遥控的工作原理是什么呢?本文将介绍其原理和设计方法。
红外线遥控就是利用波长为0.76~1.5μm之间的近红外线来传送控制信号的。
常用的红外遥控系统一般分发射和接收两个部分。
红外遥控常用的载波频率为38kHz,这是由发射端所使用的455kHz晶振来决定的,在发射端要对晶振进行整数分频,分频系数一般取12,所以455kHz÷12≈37.9 kHz≈38kHz。
也有一些遥控系统采用36kHz、40kHz、56kHz等,一般由发射端晶振的振荡频率来决定。
接收端的输出状态大致可分为脉冲、电平、自锁、互锁、数据五种形式。
“脉冲”输出是当按发射端按键时,接收端对应输出端输出一个“有效脉冲”,宽度一般在100ms左右。
一般情况下,接收端除了几位数据输出外,还应有一位“数据有效”输出端,以便后级适时地来取数据。
这种输出形式一般用于与单片机或微机接口。
除以上输出形式外,还有“锁存”和“暂存”两种形式。
所谓“锁存”输出是指对发射端每次发的信号,接收端对应输出予以“储存”,直至收到新的信号为止;“暂存”输出与上述介绍的“电平”输出类似。
关键词:80c51单片机、红外发光二极管、晶振目录第一章1、引言 (3)2、设计要求与指标 (3)3、红外遥感发射系统设计 (4)4、红外发射电路设计 (4)5、调试结果及分析 (9)6、结论 (10)第二章1、引言 (10)2、设计要求与指标 (11)3、红外遥控系统设计 (11)4、系统功能实现方法 (15)5、红外接收电路 (16)6、软件设计 (17)7、调试结果及分析 (18)8、结论 (19)参考文献附录绪论人的眼睛能看到的可见光按波长从长到短排列,依次为红、橙、黄、绿、青、蓝、紫。
其中红光的波长范围为0.62~0.76μm;紫光的波长范围为0.38~0.46μm。
比紫光波长还短的光叫紫外线,比红光波长还长的光叫红外线。
红外线遥控就是利用波长为0.76~1.5μm之间的近红外线来传送控制信号的。