三棱伺服电机简介资料讲解
- 格式:ppt
- 大小:2.08 MB
- 文档页数:17

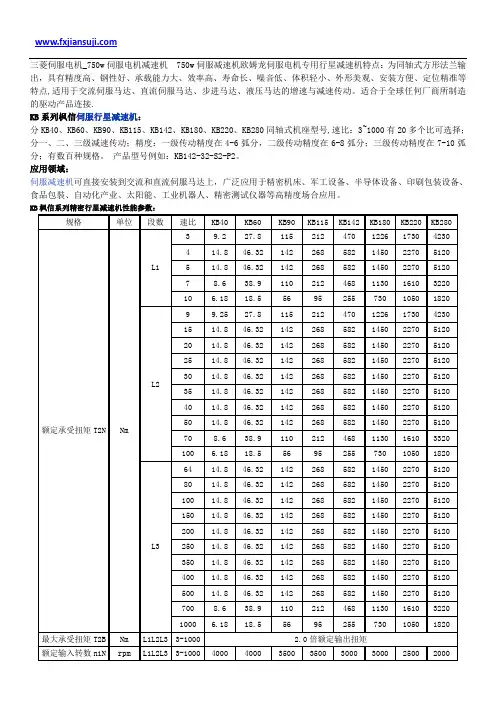
三菱伺服电机_750w伺服电机减速机750w伺服减速机欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。

伺服电机概述2.1.1 伺服电机的用途与分类伺服电机(又称为执行电机)是一种应用于运动控制系统中的控制电机,它的输出参数,如位置、速度、加速度或转矩是可控的。
伺服电机在自动控制系统中作为执行元件,把输入的电压信号变换成转轴的角位移或角速度输出。
输入的电压信号又称为控制信号或控制电压,改变控制电压可以变更伺服电机的转速及转向。
伺服电机按其使用的电源性质不同,可分为直流伺服电机的交流伺服电机两大类。
交流伺服电机按结构和工作原理的不同,可分为交流异步伺服电机和交流同步伺服电机。
交流异步伺服电机又分为两相交流异步伺服电机和三相交流异步伺服电机,其中两相交流异步伺服电机又分为笼型转子两相伺服电机和空心杯形转子两相伺服电机等。
同步伺服电机又分为永磁式同步电机、磁阻式同步电机和磁滞式同步电机等。
直流伺服电机有传统型和低惯量型两大类。
直流伺服电机按励磁方式可分为永磁式和电磁式两种。
传统式直流伺服电机的结构形式和普通直流电机基本相同,传统式直流伺服电机按励磁方式可分为永磁式和电磁式两种。
常用的低惯量直流伺服电机有以下几种。
①盘形电枢直流伺服电机。
②空心杯形电枢永磁式直流伺服电机。
③无槽电枢直流伺服电机。
随着电子技术的飞速发展,又出现了采用电子器件换向的新型直流伺服电机。
此外,为了适应高精度低速伺服系统的需要,又出现了直流力矩电机。
在某些领域(例如数控机床),已经开始用直线伺服电机。
伺服电机正在向着大容量和微型化方向发展。
伺服电机的种类很多,本章介绍几种常用伺服电机的基本结构、工作原理、控制方式、静态特性和动态特性等。
2.1.2 自动控制系统对伺服电机的基本要求伺服电机的种类虽多,用途也很广泛,但自动控制系统对它们的基本要求可归结为以下几点。
①宽广的调速范围,即要求伺服电机的转速随着控制电压的改变能在宽广的范围内连续调节。
②机械特性和调节特性均为线性。
伺服电机的机械特性是指控制电压一定时,转速随转矩的变化关系;调节特性是指电机转矩一定时,转速随控制电压的变化关系。


三菱 通用 AC伺服SSCNETⅢ/H接口型号MR-JE-_B伺服放大器技术资料集使用前请务必阅读。
在安装、运行、维护及检查前,请务必熟读本技术资料集、使用手册及相关资料,以便正确使用。
请在熟读机器的相关知识、安全信息及注意事项的所有内容后进行使用。
本技术资料集中,分为“危险”与“注意”两类安全注意事项。
危险 操作错误时,可能引起危险,造成死亡或重伤。
注意 操作错误时,可能引起危险,造成中度伤害、轻度伤害或财产损失。
此外,即使注意事项中记载的内容,有时也有造成严重后果的可能性。
两者所记均为重要内容,请务必遵守。
禁止及强制图表的表示内容如下所示。
表示禁止(严禁采取的行为)。
比如“严禁烟火”为。
表示强制(必须采取的行为)。
比如需要接地为。
在本技术资料集中,对不会造成财产损失的注意事项及其它功能等的注意事项作为“要点”进行区分。
仔细阅读本手册后请妥善保管,以便使用者可以随时取阅。
1.防止触电危险因为有触电的危险,所以请在关闭电源并经过15分钟以上,请确认充电指示灯熄灭后再进行接线作业或检查。
而且,确认充电指示灯是否熄灭时,请务必在伺服放大器的正面进行。
伺服放大器及伺服电机必须确保接地良好。
接线作业或检查应由专业技术人员进行。
伺服放大器及伺服电机请在安装后再接线。
否则会造成触电。
请勿用湿手操作开关。
否则会造成触电。
请勿损伤电缆、对其施加过大应力、在其上放置重物或挤压等。
否则会造成触电。
为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带有符号的端子)连接到控制柜的保护接地(PE)上。
使用漏电断路器(RCD)时,请选用B型。
为避免触电,请在电源端子的连接部进行绝缘处理。
2.防止火灾注意请将伺服放大器、伺服电机、再生电阻安装在不可燃物上。
直接安装在可燃物上或安装在靠近可燃物的地方,可能会造成冒烟及火灾。
在电源和伺服放大器的电源(L1・L2・L3)间请务必连接电磁接触器,在伺服放大器的电源侧形成可以切断电源的结构。
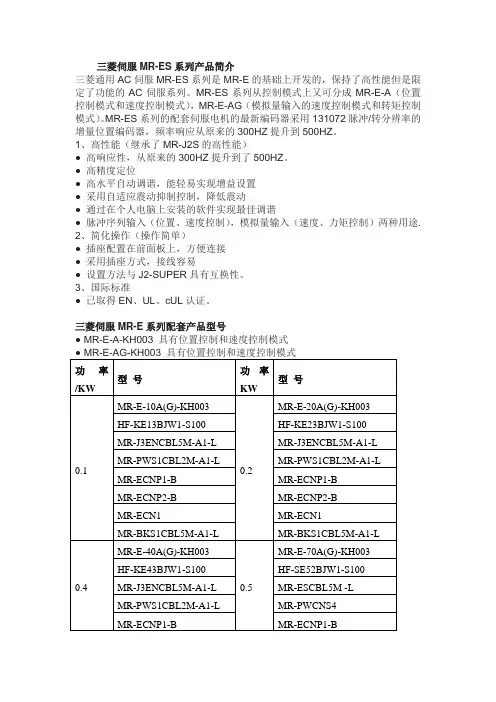
三菱伺服MR-ES系列产品简介三菱通用AC伺服MR-ES系列是MR-E的基础上开发的,保持了高性能但是限定了功能的AC伺服系列。
MR-ES系列从控制模式上又可分成MR-E-A(位置控制模式和速度控制模式),MR-E-AG(模拟量输入的速度控制模式和转矩控制模式)。
MR-ES系列的配套伺服电机的最新编码器采用131072脉冲/转分辨率的增量位置编码器,频率响应从原来的300HZ提升到500HZ。
1、高性能(继承了MR-J2S的高性能)●高响应性,从原来的300HZ提升到了500HZ。
●高精度定位●高水平自动调谐,能轻易实现增益设置●采用自适应震动抑制控制,降低震动●通过在个人电脑上安装的软件实现最佳调谐●脉冲序列输入(位置、速度控制),模拟量输入(速度、力矩控制)两种用途.2、简化操作(操作简单)●插座配置在前面板上,方便连接●采用插座方式,接线容易●设置方法与J2-SUPER具有互换性。
3、国际标准●已取得EN、UL、cUL认证。
三菱伺服MR-E系列配套产品型号● MR-E-A-KH003 具有位置控制和速度控制模式● MR-E-AG-KH003 具有位置控制和速度控制模式功率/KW 型号功率KW型号0.1MR-E-10A(G)-KH0030.2MR-E-20A(G)-KH003 HF-KE13BJW1-S100HF-KE23BJW1-S100 MR-J3ENCBL5M-A1-L MR-J3ENCBL5M-A1-L MR-PWS1CBL2M-A1-L MR-PWS1CBL2M-A1-L MR-ECNP1-B MR-ECNP1-BMR-ECNP2-B MR-ECNP2-BMR-ECN1MR-ECN1MR-BKS1CBL5M-A1-L MR-BKS1CBL5M-A1-L0.4MR-E-40A(G)-KH0030.5MR-E-70A(G)-KH003 HF-KE43BJW1-S100HF-SE52BJW1-S100 MR-J3ENCBL5M-A1-L MR-ESCBL5M -L MR-PWS1CBL2M-A1-L MR-PWCNS4MR-ECNP1-B MR-ECNP1-BMR-ECNP2-B MR-ECNP2-B MR-ECN1MR-ECN1 MR-BKS1CBL5M-A1-L MR-BKCNS10.75MR-E-70A(G)-KH0031MR-E-100A(G)-KH003 HF-KN73BJW1-S100HF-SE102BJW1-S100 MR-J3ENCBL5M-A1-L MR-ESCBL5M -LMR-PWS1CBL2M-A1-L MR-PWCNS4MR-ECNP1-B MR-ECNP1-BMR-ECNP2-B MR-ECNP2-BMR-ECN1MR-ECN1MR-BKS1CBL5M-A1-L MR-BKCNS11.5MR-E-200A(G)-KH0032MR-E-200A(G)-KH003 HF-SE152BJW1S-100HF-SE202BJW1-S100 MR- ESCBL5M –L MR- ESCBL5M –L MR-PWCNS4MR-PWCNS5MR-ECNP1-B1MR-ECNP1-B1MR-ECNP2-B1MR-ECNP2-B1MR-ECN1MR-ECN1MR-BKCNS1MR-BKCNS1MR-ES伺服放大器技术规格伺服放大器型号MR-ES-KH00310A20A40A70A100A200A伺服放大器主回路电源电压、频率三相AC200~230V/50/60Hz或单相AC230V/50/60Hz三相AC200~230V50/60Hz允许电压波动范围三相AC170~253V/50/60Hz或单相AC207~253V/50/60Hz三相AC170~253V50/60Hz容许频率波动±5%以内控制方式正弦波PWM控制,电流控制方式动力制动器内装式内装再生制动器无无有有有有保护功能过电流断路,,再生过电压断路、过负载断路(电子热保护)、检测器异常保护,再生异常保护,电压不足或瞬时停电保护,超速保护,误差过大保护位置控制模式最大输入脉冲频率500Kpps(差动式接收器时),200Kpps(集电极开路接收时)定位反馈脉冲编码器、伺服电机每转的分辨率:131,072p/rev指令脉冲倍率电子齿轮A/B倍A=1~10000、B=1~50000,1/50<A/B<50定位到位范围设置0~±50000脉冲(指令脉冲单位)误差过大±2.5转转矩限制参数设置速度控制模式速度控制范围内部速度指令1:5000速度波动率±0.01%以下(负载波动0~100%))0%(电源波动±10%)转据限制参数设置结构自冷,开放(IP00)强冷、开放式(IP00)环境周围温度0~55℃(不结冰)、保存温度:-20~65℃(不结冰)周围湿度90%RH以下(无结露),保存湿度:90%RH以下(无结露)空气室内(无阳光直射)、没有腐蚀性气体、易燃气体、油雾及尘埃标高海拔1000m以下振动 5.9m/s?以下重量(kg)0.70.7 1.1 1.7 1.7 2.0。
深圳三菱伺服电机-伺服电机编码器正确安装法对于一些三菱伺服电机的安装和正确的使用方法一直是广大厂家和技术员争议,那么我公司对一些做出了整理和好的工作方法,具体如下:一、工作内容1、这项技术适用于对德国西门子伺服电机(型号为1FT603-1FT613,1FK604-1FK610)内置编码器损坏后的安装、调试,配置的增量型编码器为德国海德汉公司的ERN1387.001/020, 绝对值编码器为海德汉公司EQN1325.001。
2、使用工具公制内六方扳手一套,自制专用工具一个,十字改锥及一字改锥各一把,梅花改锥6件套。
3、可解决的问题对有故障的西门子伺服电机进行修理或更换损坏的伺服电机内置编码器,做到修旧利废,节约维修费用。
二、操作方法1、该操作方法和一般操作方法的区别在数控机床配置的西门子数控系统中,驱动电机分主轴电机和伺服电机两种。
当电机定子、转子、轴承有故障或其电机内置编码器损坏时,我们都需要对编码器拆卸进行修理或更换。
对主轴电机来说,更换或安装编码器只要用专用工具将其安装到相应位置就可以试车了,不需要调整电机轴或编码器的角度及位置。
但对伺服电机来说,则必须按照编码器的安装要求,严格执行安装步骤。
只要安装过程中出一点差错,就会出现编码器方面的报警而不能起动机床或出现飞车事故,导致电机报废或机械部件损坏。
因此正确安装非常重要。
2、该项技术的操作步骤2.1拆卸损坏的编码器关掉机床电源,解掉伺服电机的电源电缆及反馈电缆,把电机从机床上拆下来放到工作台案上,用内六方扳手去掉电机端盖上的四条螺栓,打开端盖,先卸下编码器盖,拔下编码器上的插接电缆,用十字改锥卸下支持盘上的两条小螺丝,用内六方扳手卸出编码器中心孔内的螺栓,然后用自制专用工具把编码器从电机轴上顶出来。
这样第一步工作即告完成。
2.2.1先安装支持盘不同型号的电机,其支持盘的外形也不一样,如图2和图3,这由购买的备件提供。
用4条M2.5*6的小螺丝将支持盘安装到编码器的轴端。

三菱mrJE300伺服说明书
MR-JE-300A三菱详细说明
1.常规接口的伺服放大器,多可对应4Mpps脉冲频率。
2.针对运动控制网络SSCNETⅢ/H的驱动器。
标配全闭环控制,可以驱动旋转伺服电机,直线伺服电机。
3.针对运动控制网络SSCNETⅢ/H的驱动器。
可同时驱动2台伺服电机,节省安装空间和接线。
标配全闭环控制,可以驱动旋转伺服电机,直线伺服电机。
专业提供三菱伺服编码器电缆:
MR-JCCBL5M-L/H,MR-JHSCBL5M-L/H
MR-J3ENCBL5M-A1-L/H,MR-J3ENSCBL5M-L/H
MR-ENCBL5M-L/H,MR-EKCBL5M-L/H,MR-ESCBL5M-L/H
电源电缆:MR-PWS1CBL5M-A1-L/H
电源接头:MR-PWCNK1,MR-PWCNK2,MR-ECNP1-B,MR-ECNP2-B,MR-ENCP1-B1,MR-ECNP2-B1
航空插头:MR-PWCNS1,MR-PWCNS2,MR-PWCNS3,MR-PWCNS4,MR-PWCNS5。
信号接头:MR-J2CN1,MR-J3CN1,MR-ECN1,MR-A-TM
端子台:MR-TB20,MR-TB50,A6TBXY36
端子电缆:
MR-J2TBL05M(可提供0.3-15米长度)
MR-J2M-CN1TBL05M(可提供0.3米-5米长度)MR-J2S-B驱动器通信电缆:
MR-J2HBUS05M(可提供0.3-30米长度)
MR-J3-B驱动器通信电缆:
MR-J3BUS03M(可提供0.3-30米长度)。
三菱交流伺服电机的选择解读————————————————————————————————作者:————————————————————————————————日期:三菱交流伺服电机的选择杨世方基本理论对伺服驱动来讲,应当首先考虑的是:1,最大速度或最大转矩下所需的功率2,启动、停止过渡过程中所通的功率而对伺服电机来讲,由于其使用目的主要还在于后者,即主要是根据负载加减速时所需要的动力(功率)来决定马达大小,因此主要依据是:(1)负载的惯性大小(2)合理选取传动比电机选取则主要依据功率速率(比功率)下面看一个选取例:M ηαMαL J L TLJ M TM符号说明:T M:电动机轴上所需的电机扭矩[N-m]J M: 电动机轴上的电机转动惯量[kg-m2] (=GD2/4)R :传动比R〉1 减速R= 1 等速R< 1 增速η:传动效率≤ 1T L:负载轴扭矩[N-m]J L :负载轴上的负载的转动惯量[kg-m2] 千克米2αL :负载轴角加速度αM :经过传动比为R的传动,为使负载轴得到角加速度αL在电机轴上的角加速度αMαM= RαL起动时所需电机转矩T M为下列几相之和(1)用于电机本身加速的加速转矩T1[N-m](2)使负荷加速的转矩T2[N-m](3)为使负载轴(经过传动装置)得到转矩T L 所需要的转矩T3[N-m] T2和T3 不同,T3是正常运行时所需转矩则:T1= J M ·αM = J M ·R·αL根据,η·R·T2 = J L ·αL (牛顿定律)负载加速转矩:T2=(J L ·αL)/η·R正常运行时电机提供转矩:T3= T L/η·R电机起动转矩T M ≥T1+T2+T3 ≥J M ·R·αL +{(J L ·αL)+T L/η·R}---------(1) 对上式右侧求R的偏微分,并使其等于零,即可求得(1)式右变最小值时的R0∂ T M / ∂ R =0R0= (J L ·αL+T L)/ J M·αL·η ------------------ (2)R0 称为最佳传动比,就是能使T M最小的传动比,选取这个传动比,电机所需的起动矩扭最小。
伺服电机中文名称:伺服电机英文名称:servo motor 定义:转子转速受输入信号控制,并能快速反应,在自动控制系统中作执行元件,且具有机电时间常数小、线性度高、始动电压所属学科:航空科技(一级学科) ;航空机电系统(二级学科)伺服电机在伺服系统中控制机械元件运转的发动机.是一种补助马达间接变速装置。
伺服电机,可使控制速度,位置精度非常准确。
将电压信号转化为转矩和转速以驱动控制对象一:伺服电机工作原理1.伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
2.交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。
大惯量,最高转动速度低,且随着功率增大而快速降低。
因而适合做低速平稳运行的应用。
3.伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度(线数)。
三菱交流伺服电机的选择杨世方基本理论对伺服驱动来讲,应当首先考虑的是:1,最大速度或最大转矩下所需的功率2,启动、停止过渡过程中所通的功率而对伺服电机来讲,由于其使用目的主要还在于后者,即主要是根据负载加减速时所需要的动力(功率)来决定马达大小,因此主要依据是:(1)负载的惯性大小(2)合理选取传动比电机选取则主要依据功率速率(比功率)下面看一个选取例:T L J符号说明:T M:电动机轴上所需的电机扭矩[N-m]J M: 电动机轴上的电机转动惯量[kg-m2] (=GD2/4)R :传动比R〉1 减速R= 1 等速R< 1 增速η:传动效率≤ 1T L:负载轴扭矩[N-m]J L :负载轴上的负载的转动惯量[kg-m2] 千克米2α:负载轴角加速度Lα:经过传动比为R的传动,为使负载轴得到角加速度αL M在电机轴上的角加速度αMα= RαLM起动时所需电机转矩T M为下列几相之和(1)用于电机本身加速的加速转矩T1[N-m](2)使负荷加速的转矩T2[N-m](3)为使负载轴(经过传动装置)得到转矩T L 所需要的转矩T3[N-m] T2和T3 不同,T3是正常运行时所需转矩则:T1= J M ·αM = J M ·R·αL根据,η·R·T2 = J L ·αL (牛顿定律)负载加速转矩:T2=(J L ·αL)/η·R正常运行时电机提供转矩:T3= T L/η·R电机起动转矩T M ≥T1+T2+T3 ≥J M ·R·αL +{(J L ·αL)+T L/η·R}---------(1) 对上式右侧求R的偏微分,并使其等于零,即可求得(1)式右变最小值时的R0∂ T M / ∂ R =0R0= (J L ·αL+T L)/ J M·αL·η ------------------ (2)R0 称为最佳传动比,就是能使T M最小的传动比,选取这个传动比,电机所需的起动矩扭最小。