船舶吃水差对船舶能耗的影响
- 格式:doc
- 大小:49.50 KB
- 文档页数:4


第一节船舶吃水差的概念与基本计算一、吃水差概述1. 吃水差(trim)概念当t = 0时,称为平吃水(Even keel);t = d F-d A当t > 0时,称为首倾(Trim by head);当t < 0时,称为尾倾(Trim by stern)。
2. 吃水差对船舶航海性能的影响快速性操纵性耐波性等首倾时轻载时螺旋桨沉深比下降,影响推进效率。
轻载时舵叶可能露出水面,影响舵效。
满载时船首容易上浪。
过大尾倾时轻载时球鼻首露出水面过多,船舶阻力增大。
水下转船动力点后移,回转性变差。
轻载时船首盲区增大,船首易遭海浪拍击。
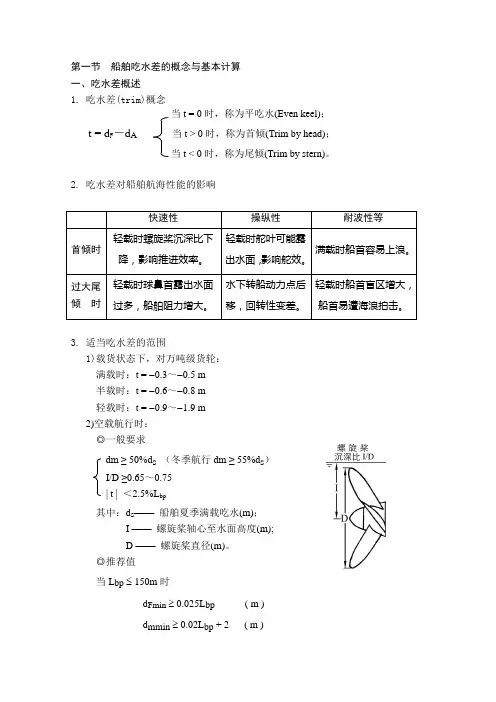
3. 适当吃水差的范围1)载货状态下,对万吨级货轮:满载时:t = -0.3~-0.5 m半载时:t = -0.6~-0.8 m轻载时:t = -0.9~-1.9 m2)空载航行时:◎一般要求dm ≥ 50%d s(冬季航行dm ≥ 55%d s)I/D ≥0.65~0.75| t | <2.5%L bp其中:d s——船舶夏季满载吃水(m);I ——螺旋桨轴心至水面高度(m);D ——螺旋桨直径(m)。
◎推荐值当L bp≤ 150m时d Fmin≥ 0.025L bp( m )d mmin ≥ 0.02L bp + 2 ( m )当L bp > 150m 时d Fmin ≥ 0.012L bp + 2 ( m ) d mmin ≥ 0.02L bp + 2 ( m ) 二、吃水差产生的原因1. 纵向上,船舶装载后总重心与正浮时的浮心不共垂线,即g b x x ≠2. g x 的求法 合力矩定理 ()i i g P x x ∑⋅=∆三、吃水差的基本计算 1. 纵向小倾角静稳性理论证明,船舶在小角度纵倾时,其纵倾轴为过初始水线面漂心的横轴,在排水量一定时,纵倾前后相临两浮力作用线的交点L M 为定点,L M 称为纵稳心。
sin tan RL L L L BPt M GM GM GM L ϕϕ=∆⋅⋅≈∆⋅⋅=∆⋅⋅2. 每厘米纵倾力矩MTC :吃水差改变1cm 所需要的纵倾力矩,可由资料查得。

轮机管理船舶吃水错题引言船舶的吃水是指船体处于水中时,船体下沉的深度。
合理管理船舶吃水对保证船舶的安全运行、降低沉船风险、提高航行效率具有重要意义。
本文将围绕轮机管理船舶吃水的相关问题展开探讨,分析可能出现的错题,并提出解决方案。
船舶吃水的概念和影响因素船舶吃水是船体浸入水体的深度,受到以下因素的影响: 1. 船舶的载重量:船舶装载的货物数量和重量决定了船舶的吃水深度。
吃水深度越大,说明船舶所承载的货物越多。
2. 船舶结构和设计:船舶的船型、船体材料、船舶的前后部分设计,都会影响船舶的吃水情况。
不同的船舶结构和设计会导致吃水深度的差异。
3. 运载物的稳定性:船舶在水中的浮力和容积决定了船舶的稳定性和浮力,进而影响船舶的吃水深度。
4. 船舶经营管理的合理性:船舶的运营管理对吃水深度的控制也起到关键作用。
船舶吃水常见的错题及解决方案1.错题:船舶吃水超出设计值,导致超载。
解决方案:在船舶装载货物前,严格按照设计值确定船舶的最大吃水深度,并对船舶进行称重,确保不超过设计的载重量。
船舶管理人员应监督和控制装载操作,确保负载始终在合理范围内,避免船舶超载。
2.错题:船舶吃水过浅,影响船舶的航行性能和安全性。
解决方案:船舶管理人员应定期对船舶的吃水进行测量和检查,确保船舶的吃水深度符合航行要求。
如果发现吃水过浅,应及时采取措施,如适当卸载货物或重新调整货物的分配,以确保船舶的吃水深度满足航行需求。
3.错题:船舶吃水过深,影响船舶的稳定性。
解决方案:船舶管理人员应控制船舶的装载量,避免过度装载,导致船舶吃水过深。
同时,船舶管理人员应确保船舶的结构和稳定性符合相关规定和要求,以确保船舶在吃水深度正常情况下拥有良好的稳定性。
4.错题:船舶吃水过深或过浅,导致能源消耗和航行效率降低。
解决方案:船舶吃水的深度会影响船舶的水动力性能,进而影响到能源消耗和航行效率。
船舶管理人员应合理调整船舶的吃水深度,以达到最佳的航行效率和能源利用率。
第五章船舶吃水差第一节运营船舶对吃水差及吃水的要求(一)船舶吃水差及吃水对航行性能的影响对船舶的操纵性、快速性、耐波性、稳性、强度及过浅滩能力都有影响。
(1)首倾过大空载时,往往尾吃水过小,影响螺旋桨推进效率和舵效;满载时,首部甲板容易上浪使船舶耐波性下降。
(2)尾倾过大空载时,船首了望盲区增大,船首底板易遭受海浪猛烈拍击,使船舶耐波性下降,损害船体结构;满载时,使转船作用点后移,影响舵效。
(二)航行船舶对吃水差的要求根据经验,万吨轮适宜吃水差为:满载时t=-0.3m~-0.5m半载时t=-0.6m~-0.8m轻载时t=-0.9m~-1.9m(三)空载航行船对吃水及吃水差的要求尾机型船在空载时因机舱较重而尾倾严重,平均吃水过小,会严重影响船舶航行安全。
因此,IMO和各国都对空载吃水和吃水差有明确的要求。
主要有:1.空载吃水差:|t |<2.5%L,使纵倾角φ< 1.5°;2.尾吃水:要求达到螺旋桨沉深直径比h/D >0.8 ~0.9;3.平均吃水:一般要求d> 50% 夏季满载吃水;m> 55% 夏季满载吃水;4.冬季航行要求dm5.最小平均吃水d≥ 0.02L + 2 (m)m6.首吃水: L ≤150 m,d≥ 0.025L (m)FL >150 m,d≥ 0.012L + 2 (m)F第二节 船舶吃水差及首尾吃水的计算(一)吃水差产生的原因船舶装载后重心的纵向位置与正浮时浮心的纵向位置不共垂线。
(二) 吃水差计算原理1.计算条件一般来说,船舶纵倾角都在小倾角(10 ~15°)范围内,因此,仅仅从静纵倾力矩角度来考察船舶纵向浮态和计算吃水差就完全可以满足实际需要。
作用在船体上的静纵倾力矩仅限于船舶装卸载荷或纵向移动载荷所产生的。
2.厘米纵倾力矩MTC船舶吃水差t 与作用在船体上的纵倾力矩M T 成正比,如果纵倾力矩为零,就没有吃水差。
为便于计算吃水差,船舶设计部门给出了船体在各排水量下吃水差每变化1厘米所对应的纵倾力矩值,称为厘米纵倾力矩,用MTC 表示,其单位为t.m /cm 。
简述船舶吃水对船舶操纵的影响。
船舶的吃水是指船舶在水中的下沉深度,也就是船体下部在水中的浸没部分。
船舶的吃水对船舶操纵有着重要的影响,下面我将从多个角度来详细解释。
1. 稳定性影响:船舶的吃水会直接影响其稳定性。
通常情况下,船舶的稳定性随着吃水的增加而增强。
较大的吃水可以提供更大的浮力,使得船舶更难倾覆或失去平衡。
然而,过大的吃水也可能降低船舶的稳定性,因为过高的重心可能导致倾覆风险。
2. 操纵性影响:船舶的吃水对操纵性有着直接的影响。
较大的吃水可以提供更好的船舶操纵性能,因为它可以增加船舶的侧向稳定性和舵效。
此外,较大的吃水还可以降低船舶在海浪中的受力和纵向运动,从而提高操纵的可靠性和舒适性。
3. 速度影响:船舶的吃水也会对船舶的速度产生影响。
一般来说,较小的吃水可以减少水的阻力,从而提高船舶的速度。
然而,在一定范围内,增加吃水也可以提高速度,因为它可以减少波浪对船舶的阻力。
但是,如果吃水过大,会增加摩擦阻力和波浪阻力,从而降低船舶的速度。
4. 水深限制:船舶的吃水还受到水域深度的限制。
如果船舶的吃水超过了水域的最大深度,船舶将无法通过该水域。
因此,船舶的吃水必须小于或等于水域的最大深度,以确保船舶的安全航行。
综上所述,船舶的吃水对船舶操纵有着重要的影响。
它涉及到船舶的稳定性、操纵性、速度和水深限制等方面。
船舶设计和操作中需要合理考虑和控制船舶的吃水,以确保船舶的安全、稳定和高效运行。


第四章船舶吃水差第一节营运船舶对吃水差及吃水的要求一、船舶吃水差及吃水对航行性能的影响二、航行船舶对吃水差的要求1. 定义:•船舶吃水差(Trim)——指首尾吃水的差值。
t=d F-d A•万吨级货船适度吃水差为:满载时一0.3 ——一0.5 m;•半载时一0.6 ——一0.8 m;轻载时一0.9 ——一1.9 m。
三、空载航行船对吃水及吃水差的要求IMO和各国都对空载吃水和吃水差有明确的要求。
主要有:一般空船压载后吃水≥50% d s,冬季压载后吃水≥55%d s;|t|<2.5%L,使纵倾角<1.5°最小平均吃水d m≥0.02L BP + 2 (m )L BP≤150 m :d Fmin≥0.025 L BP〔m〕L BP>150 m :d Fmin≥0.012L BP + 2 (m )螺旋桨沉深直径比h/D >0.8 ~0.9第二节船舶吃水差及吃水的基本核算一、吃水差产生的原因•装载后重心纵向位置与正浮状态的浮心纵向位置不在同一垂线上,则船舶产生一纵倾力矩,迫使船舶纵倾。
随着船舶纵倾,水线下排水体积的形状发生变化,浮心也随之移动。
当船舶倾至某一水线时,重心与纵倾后的浮心重新在与新水线垂直的垂线上,则船舶达到平衡,此时船舶首、尾吃水不相同,从而产生吃水差。
二、吃水差计算原理:三、吃水差及首、尾吃水的基本核算1.计算排水量和重心纵坐标△=ΣP ix g=Σp i *x i /△2 . 计算船舶首吃水d F和尾吃水d A第三节 载荷变动及舷外水密度改对纵向浮态的影响一、载荷纵移载荷P 沿纵向移动x ,从而产生纵倾力矩9.81Px kN·m ,于是载荷移动引起的 吃水差改变量δt 为(m)注意:载荷P 前移,δt 为+;载荷P 后移,δt 为一。
•载荷移动后新的首、尾吃水d F1、d A1和吃水差t 1为 :二、重量增减*1.少量增减少量增减——指载荷增减量约少于10%Δ。
注意:装载时P 取+,卸载时P 取一。
5.1 对船舶吃水差的要求一.吃水差对船舶的影响1.吃水差船舶首、尾吃水的差值称为吃水差t,即:t = d F —d A 。
国外有的定义为:t = d A -d F 。
2.吃水差与纵向浮态(1) t = 0,表示首吃水等于尾吃水,称为平吃水。
(2) t > 0,表示首吃水大于尾吃水,称为首倾。
(3) t < 0,表示首吃水小于尾吃水,称为尾倾。
3.吃水差的重要性吃水差对船舶的操纵性、快速性、耐波性、稳性、强度及过浅滩能力都有影响。
(1)首倾过大空载时,往往尾吃水过小,影响螺旋桨推进效率和舵效;满载时,首部甲板容易上浪使船舶耐波性下降。
(2)尾倾过大空载时,船首了望盲区增大,船首底板易遭受海浪猛烈拍击,使船舶耐波性下降,损害船体结构;满载时,使转船作用点后移,影响舵效。
二.对船舶吃水差及空载吃水的要求目前,对船舶吃水差还没有强制性要求,各船舶根据具体航次的具体情况确定适当的吃水差,有一些经实践证明是比较合适的吃水差经验值可供参考。
但对空载吃水和吃水差有明确的要求。
1.吃水差要求经验证明,万吨级海船较佳的吃水差为适当尾倾:满载:t = —0. 3 ~ —0. 5 m半载:t = —0. 6 ~ —0.8 m轻载:t = —0. 3 ~ —0.5 m2 .空载吃水和吃水差要求尾机型船在空载时因机舱较重而尾倾严重,平均吃水过小,会严重影响船舶航行安全。
因此,IMO和各国都对空载吃水和吃水差有明确的要求。
主要有:空载吃水差:|t | V 2. 5%L,使纵倾角©V 1.5 ° ;尾吃水:要求达到螺旋桨沉深直径比h/D > 0.8〜0.9 ;(教材小) 平均吃水:一般要求d m> 50%夏季满载吃水;冬季航行要求d m > 55% 夏季满载吃水;最小平均吃水d m > 0.02L + 2(mAE AD BCCE FD BF即上—d F - dm _____ dm - d AL L/2-X f L/2 X f首吃水:L < 150 m, d F > 0.025L(m )L > 150 m, d F > 0.012L + 2 (m )5.2吃水差与首尾吃水的计算和调整一•吃水差的计算原理1 •计算条件一般来说,船舶纵倾角都在小倾角(10 ~15°)范围内,因此,仅仅从静纵 倾力矩角度来考察船舶纵向浮态和计算吃水差就完全可以满足实际需要。
第一节 航行船舶对吃水差及吃水的要求吃水差的概念: 1.吃水差的定义船舶吃水差是指首吃水与尾吃水的差值,用符号t 表示。
当船舶首吃水大于尾吃水时,t 为正值,称为首吃水差,相应纵向浮态称作首倾;当船舶首吃水小于尾吃水时,t 为负值,称为尾吃水差,该纵向浮态称作尾倾;当船舶首吃水和尾吃水相同时,t 为零值,相应纵向浮态称作平吃水。
2.吃水差产生的原因若装载后重心纵向位置与正浮状态的浮心纵向位置不在同一垂线上,则船舶将产生一纵倾力矩,迫使船舶纵倾。
随着船舶纵倾,水线下排水体积的形状发生变化,浮心也随之移动。
当船倾斜至某一水线时,重心与纵倾后的浮心重新在与新水线垂直的垂线上,则船舶达到平衡,此时船舶首、尾吃水不相同,从而产生吃水差。
吃水差对船舶性能的影响:船舶吃水差及吃水对操纵性、快速性、适航性与抗风浪性能都会产生一定的影响。
尾倾过大,船舶操纵性变差,航速降低,船首部底板易受波浪拍击而导致损坏,驾驶台瞭望盲区增大;首倾时使螺旋桨和舵叶的人水深度减小,航速降低,航向稳定性变差,首部甲板容易上浪,而且船舶在风浪中纵摇和垂荡时,使螺旋桨和舵叶易露出水面,造成飞车。
船舶在某些情况下空载航行,此时吃水过小,更影响螺旋桨和舵叶的入水深度,使船舶操纵性和快速性降低。
另外,因受风面积增大,也使船舶稳性变差、航速减小。
营运船舶对吃水差的要求:船舶在航行中为保证其航海性能,应使船舶适度尾倾。
船舶开航前,尾吃水差适宜值与船舶大小、装载状况、航速等因素有关。
实践经验表明,万吨级货船适度吃水差为:满载时-0.3~-0.5m ;半载时-0.6~-0.8m ;轻载时-0.9~-1.9m 。
各船具体情况不同,驾驶人员应根据本船实际状况确定适当尾吃水差值。
船舶不同装载状况下若航速一定,存在一纵倾状态使船舶航行阻力最小,因而所耗主机功率也最小,从而节省了燃料,该纵倾状态称为最佳纵倾。
空载航行船舶对吃水差及吃水的要求:船舶在空载时,为了节约能源总力图减少压载重量,但考虑到船舶过小吃水及不适当的吃水差会给船舶安全航行带来不利影响,因此应使压载后的船舶纵向浮态满足一定要求。
浅析吃水差对船舶的影响及应对策略作者:苑靖国周章海来源:《中国新技术新产品》2011年第24期摘要:吃水差作为表征船舶状态的一项重要指标,在船舶营运中起着不可忽视的作用。
在不同的载货状态下,吃水差对船舶各项性能的影响也不相同。
本文以船舶载货状态为导向,就吃水差对船舶各项性能的影响作出理论分析,并针对其影响给出简单而实用的应对方法。
关键词:吃水差;操纵性;快速性;耐波性中图分类号:U412.1 文献标识码:A吃水差(trim)是指船舶首吃水与尾吃水的差值。
当首尾吃水相等时,称作平吃水;当首吃水大于尾吃水时,称作首倾;当尾吃水大于首吃水时,称作尾倾。
吃水差主要影响船舶的操纵性、快速性和耐波性,进而影响船舶的安全。
此外,吃水差对船舶稳性、船体纵向受力情况、通过浅水区时允许的船舶最大排水量以及部分港口使费也有影响,下面就不同的载货状态下,吃水差对船舶上述性能的影响及应对策略作出阐述。
1空载状态下,吃水差对船舶性能影响及应对策略船舶操纵性包括船舶保持或改变航向以及改变船速三方面的性能。
在本文中所提到的操纵性仅仅指船舶的保向和改向性能,而将改变船速放在快速性里讨论。
舶保持航向、改变航向主要是依靠船舶的舵效。
舵效是指航向角对操舵的反应能力,即舵效是保持航向和改变航向的效率。
船舶快速性是研究船舶尽可能消耗较小的机器功率以维持一定航行速度的能力,或者说,船舶是在给定主机功率时,表征船舶航行速度快慢的一种性能。
船舶耐波性是指船舶在风浪等外力作用下产生摇荡运动以及抨击、上浪、失速等现象时仍能保持一定航速安全航向的性能。
1.1.船舶空载时吃水差对船舶性能的影响当船舶空载且首倾时,船尾的推进器(螺旋桨)和舵叶入水深度过浅,致使船舶的舵效明显降低;且此时船头吃水较大,致使船舶在转向时船头所受海水的阻力也会增加,以上两个原因叠加就使得船舶空载且首倾时船舶的保向和改向能力大大降低,操纵性不佳;并且船头扎入水中增加了船舶航行阻力,快速性也较差。
船舶节能减排途径【摘要】为提高船舶运营经济效益和保护环境,实现船舶节能减排目标,探讨节能减排的途径有优化航线选择、优化船舶航行状态、减少使用额外的发电机、降低发电机负荷、加强机器设备的维护保养管理、建立节能生产奖惩机制。
加强船舶节能减排,既能缓解能源环境压力,节约航运企业的营运成本,同时也可减少环境污染。
【关键词】船员;船舶管理;维护保养;节能途径0 引言据测算,船舶每节约1 kWh的电量就可节省180 g的燃油。
因此,节约燃油消耗对提高船舶营运效益有着重要意义,同时也可以减少有害物质的排放。
为了提高船舶营运性能,船舶所有人都会积极更新设备,定期给船壳和螺旋桨做清洁保养工作;航运企业应开展节能教育,引导广大船员认识节能减排的意义;作为工作在第一线的广大船员应坚持从现在做起、从自身做起、从小事做起,为节能减排尽一份力量。
1 优化航线选择船舶航速对节能有着非常重要的作用。
船长应根据每个航次的实际情况,综合考虑如何利用风、流、浪等各种因素,选择最优航线,采取最低耗油率的航速以节约燃油。
最优航线可能不是航程最短的航线,但其应至少包括最短航行时间和最少燃料消耗。
不同航运企业及不同船舶种类,其最佳性能标准(主机转速、船速、单位油耗等)也不同,船长应熟悉并遵循这些标准。
在整个航程中,船长应仔细分析本船在不同海况时的操纵特性和主机负荷,适时调整主机参数来取得最佳性能。
在风平浪静的海面上,船长应加快主机转速,以取得最佳性能;在恶劣的海况条件下,船舶可能颠簸剧烈,甲板上浪,即使主机转速再高,船舶也会以非常慢的速度航行,前进距离也并未因此而增加,此时应适当减速。
如果不降低主机转速,不仅会损害主机,而且会消耗大量的燃油,影响主机有效功率。
为了取得更好的节能效果,一般较大的航运企业都采用气导公司推荐的航线,在航行中不断根据气象情况,提前避开恶劣天气达到节油和避免对船舶造成损坏的目的。
遇到恶劣天气时,可能需要不断地调整航线,虽然增加了航线设计的工作量,但取得的节能效果非常可观。
船舶吃水差对船舶能耗的影响
吃水差作为表征船舶状态一项重要指标,在船舶营运中起着不可忽视的作用。
在不同的载货状态下,吃水差对船舶各项性能影响也不同。
船舶吃水差是指船舶艏艉吃水的差额。
当艏吃水大于艉吃水时专业上称为艏倾。
反之为艉倾。
艏艉一样时称为平吃水。
吃水差主要影响船舶的操纵性、快速性和耐波性,进而影响船舶的安全。
当船舶出现艏倾时,船舶回旋半径减少,舵效、航向稳定性变差,船速下降,航行遇到风浪时船艏易上浪从而造成甲板建筑、设备的浪损。
艉倾时舵效、航向稳定性、航速都有所提高,因此船舶出海航行时吃水差要求在30至50厘米之间。
平吃水一般都是船舶过浅时调整出来的。
下面通过船舶的三种状态进行分析。
一、船舶空载
(一)艏倾
船艉舵叶和推进器入水过浅,舵效降低,船艏受阻力增加,操纵性能差,增加船舶能耗。
(二)平吃水
空载船舶整体吃水小,舵叶和推进器入水浅,致使船身受风面积增大,船舶航行阻力增加,船舶操纵性和快速性差,增加船舶能耗。
(三)艉倾
船艉吃水较大,船艏上翘,受风面积增大,尤其在船舶受横风时,船艏受风影响较大,会抵消船舶的舵效,船舶“艉找风”现象明显,即船舶操纵性不佳,并且过大时会增加船艏盲区。
总之,船舶空载时船舶操纵性差,航行阻力大,快速性也不佳,甚至耐波性也下降,增加船舶能耗。
(四)船舶空载吃水差调整策略
1.当船长≤150m,船艏吃水≥0.025 L(船长),平均吃水≥0.02L(船长)+2m。
2.当船长>150m,船艏吃水≥0.012 L(船长)+2m,平均吃水≥0.02L(船长)+2m。
但是,在船舶运营时不能精确界定,所以在实际操作中会采用对船舶进行适当的压载的方法,让船舶拥有适当的吃水,保证船舵和推进器有足够的入水深度,从而保证船舶操纵性、快速性和耐波性,进而减少船舶能耗。
二、船舶轻载或半载
当船舶轻载或半载时,由于船舶吃水比空载大的多,此时船舶的各项性能都有了明显提高,但吃水差对船舶的某些性能仍然会有比较显著的特点。
(一)艏倾
船艏入水深度较大,船舶航行阻力增加,船舶快速性下降,增加船舶能耗。
(二)艉倾
船艉吃水过大时,船艏受风面积增大,转向阻力和航行阻力增大,导致船舶的操纵性和快速性下降,同时海浪剧烈拍击船艏底板致使船舶耐波性下降,船舶能耗增加。
(三)船舶轻载或半载吃水差调整策略
为保证船舶适当艉倾,提高船舶操纵性、快速性和耐波性,减少船舶航行能耗,一般万吨级船吃水差的要求:半载:t=-0.6~-0.8m;空载:t=-0.9~-1.9m。
三、船舶满载
(一)满载
船舶满载且艏倾较大时,船艏吃水较大,且船艏没入水中的体积较大,这样会增加船舶的航行阻力,降低船舶的快速性;海水对船艏的转向阻力也会降低船舶的操纵性;艏倾时船舶在前进过程中船艏加板容易上浪,严重时船舶会伴随着巨大的摇摆、失速和摇荡等现象,从而使船舶的耐波性下降。
(二)平吃水
平吃水时,船舶的操纵性和耐波性都没问题,但是平吃水时,船艏的航行阻力仍然较大,船舶快速性不佳。
(三)艉倾
船舶艉倾较大时,对船舶耐波性和快速性影响不大,但因船舶水下转船作用点(转心)后移过多从而引起船舶转船力臂减小,舵效降低,使得船舶操纵性降低。
(四)船舶满载吃水差调整策略
为了保证船舶在满载时,船舶的操纵性、快速性和耐波性处于最佳状态,要求船舶在满载时保持适当的艉倾。
一般万吨级船吃水差的要求:满载:t=-0.3~-0.5m。
综上所述,吃水差对船舶的操纵性、快速性、耐波性、稳性和船舶纵向受力情况等都有影响,那么如何让船舶保持一个合理的吃水差就成为一个关会船舶安全、船舶操纵性能和船东利益的大问题。
对于同一艘船舶来说,吃水差不同,其水线下流线型船体形状会有明显差别,从而直接影响船舶阻力、稳性和船体受力情况。
因此,船舶在船速和排水量一定时,通过调整吃水差必然会找到一个合适的最佳吃水差。
在最佳吃水差状态下,可以使船舶操纵性、快速性和耐波性同时满足,也可满足船舶的安全、经济、快速、高效地运营。