循迹小车电路分析
- 格式:ppt
- 大小:1.08 MB
- 文档页数:25
寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目.笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行.总体方案整个电路系统分为检测、控制、驱动三个模块.首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示.图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线.笔者在该模块中利用了简单、应用也比较普遍的检测方法--红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
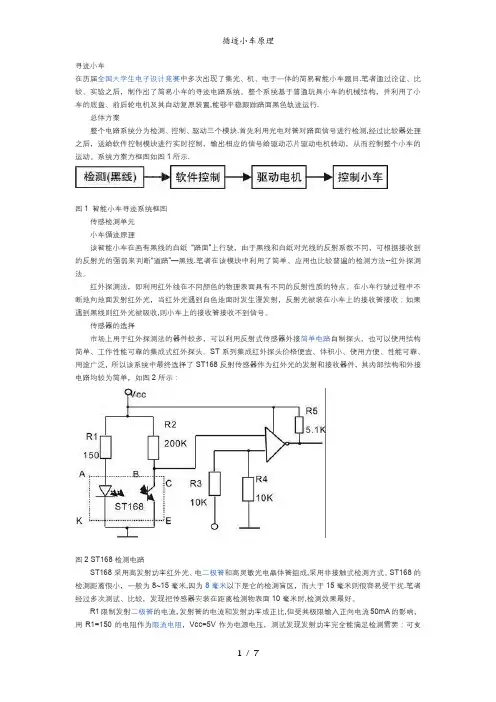
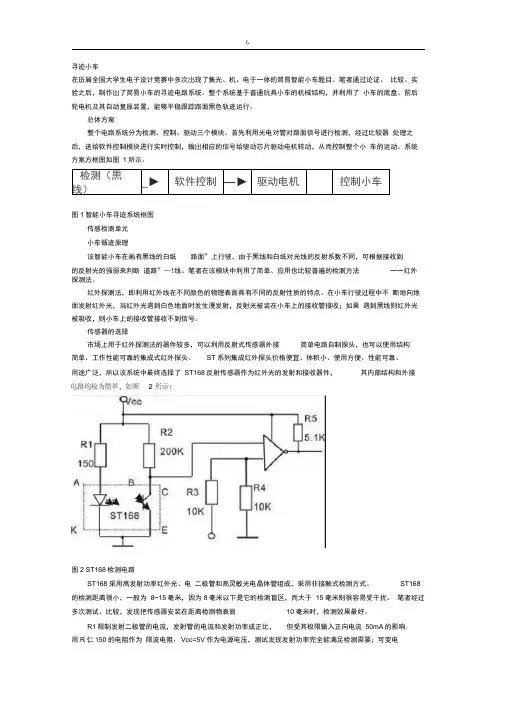
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰.笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
寻迹小车在历届中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
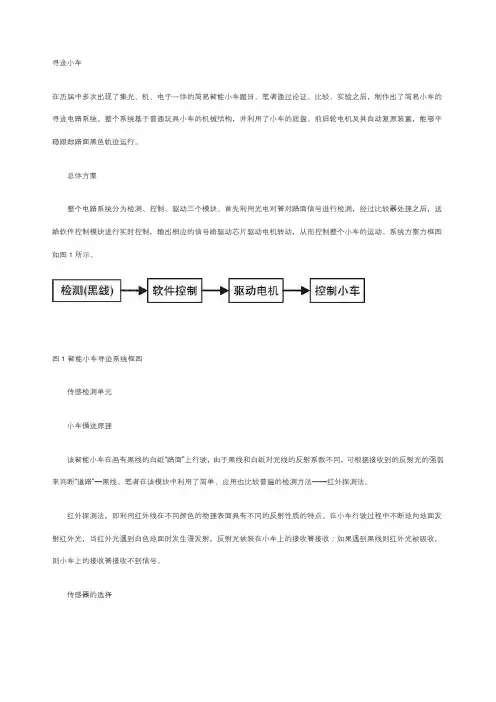
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2ST168检测电路ST168采用高发射功率红外光、电和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
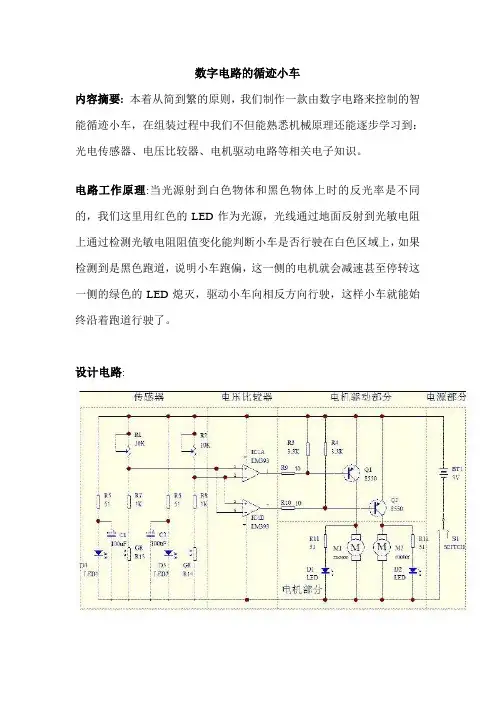
数字电路的循迹小车内容摘要:本着从简到繁的原则,我们制作一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。
电路工作原理:当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
设计电路:重要部件:光敏电阻器件: 能够检测外界光线的强弱,外界光线越强光敏电阻的阻值越小,外界光线越弱阻值越大,当红色LED光投射到白色区域和黑色跑道时因为反光率的不同,光敏电阻的阻值会发生明显区别,便于后续电路进行控制。
LM393比较集成电路: LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成。
它的作用是比较两个输入电压,根据两路输入电压的高低改变输出电压的高低。
输出有两种状态:接近开路或者下拉接近低电平,LM393采用集电极开路输出,所以必须加上拉电阻才能输出高电平。
带减速齿轮的直流电机:直流电机驱动小车的话必须要减速,否则转速过高的话小车跑得太快根本也来不及控制,而且未经减速的话转矩太小甚至跑不起来,我们专门定做的这种电机已经集成了减速齿轮大大降低了制作难度非常适合我们使用。
组装步骤:第一步:电学元件的测试用万用表对各个电阻测量,确定其阻值:用万用表测量,确定二极管是否完好;用电池测试电机是否达到要求,测试二极管是否发光.第二步:电路部分基本焊接电路焊接部分比较简单,焊接顺序按照元件高度从低到高的原则,首先焊接8个电阻,焊接时务必用万用表确认阻值是否正确,焊接有极性的元件如三极管、绿色指示灯、电解电容务必分清楚极性尽量参考我们图片的元件方向焊接,焊接电容时引脚短的是负极插入PCB丝印上阴影的一侧,焊接绿色LED时注意引脚长的是正极,并且焊接时间不能太长否则容易焊坏,D4 D5 R13 R14 可以暂时不焊,集成电路芯片可以不插,初步焊接完成后请务必细心核对,防止粗心大意。
循迹小车电路分析循迹小车是一种能够根据预定路径行驶的智能小车,通常使用红外传感器对车辆周围环境进行检测和判断,以实现自动导航。
下面将对循迹小车的电路进行分析。
1.电源电路:循迹小车的电源电路提供电源供电,通常使用锂电池或干电池。
电源电路还包括电源开关、电源指示灯和电压降压电路,用于保护电路和提供稳定的工作电压。
2.传感器电路:循迹小车主要使用红外传感器进行循迹。
传感器电路的主要作用是接收传感器输出信号,并进行信号放大和滤波处理,以提供可靠的循迹信号给控制电路。
传感器电路还包括调节电位器,用于校准传感器的感应距离和灵敏度。
3.控制电路:控制电路是循迹小车的核心部分,它接收传感器电路输出的循迹信号,并根据设定的算法进行信号处理和逻辑判断。
控制电路一般采用微控制器或单片机作为控制核心,通过编程实现对小车的控制和导航功能。
控制电路还包括继电器、电平转换电路和数字信号处理电路等。
4.驱动电路:驱动电路是将控制电路的输出信号转化为驱动电机和舵机的电流信号,从而控制小车的运动。
驱动电路通常采用H桥电路,通过控制H桥电路的开关状态,实现对电机的正反转和速度调节。
驱动电路还包括电机驱动模块、电机调速器和电机保护电路等。
在循迹小车电路中,各个电路之间通过电缆连接,形成完整的电路系统,以实现循迹小车的功能。
除了以上所述的电路,循迹小车还可以添加其他辅助电路和功能模块,如红外避障模块、声音检测模块、蓝牙通信模块等,以扩展循迹小车的功能和应用范围。
总之,循迹小车的电路设计涉及电源电路、传感器电路、控制电路和驱动电路等多个部分,其中控制电路是核心,通过传感器检测信号、控制逻辑判断和驱动电机等,实现循迹小车的自动导航和运动控制。
不同的循迹小车电路设计可能会有所不同,但总体上都需要考虑电路的稳定性、可靠性和功能扩展性,以提供高效的循迹性能和功能。
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
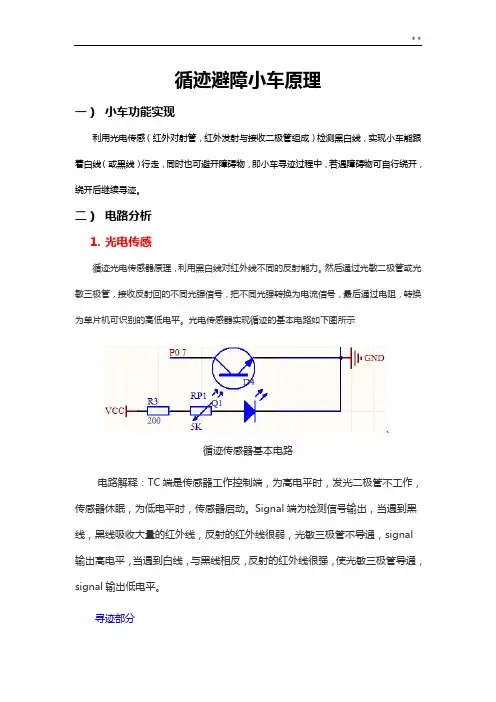
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal 输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,signal输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择范围为3 –5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
智能循迹小车设计专业:自动化班级:0804班姓名:指导老师:2018年8月——2018年10月摘要:本课题是基于AT89C52单片机的智能小车的设计与实现,小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。
小车系统以 AT89S52 单片机为系统控制处理器;采用红外传感获取赛道的信息,来对小车的方向和速度进行控制。
此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。
引言当今世界,传感器技术和自动控制技术正在飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。
现在国外的自动控制和传感器技术已经达到了很高的水平,特别是日本,比如日本本田制作的机器人,其仿人双足行走已经做得十分逼真,而且具有一定的学习能力,还据说其智商已达到6岁儿童的水平。
作为机械行业的代表产品—汽车,其与电子信息产业的融合速度也显著提高,呈现出两个明显的特点:一是电子装置占汽车整车<特别是轿车)的价值量比例逐步提高,汽车将由以机械产品为主向高级的机电一体化方向发展,汽车电子产业也很有可能成为依托整车制造业和用车提升配置而快速成为新的增长点;二是汽车开始向电子化、多媒体化和智能化方向发展,使其不仅作为一种代步工具、同时能具有交通、娱乐、办公和通讯等多种功能。
无容置疑,机电一体化人才的培养不论是在国外还是国内,都开始重视起来,主要表现在大学生的各种大型的创新比赛,比如:亚洲广播电视联盟亚太地区机器人大赛<ABU ROBCON)、全国大学生“飞思卡尔”杯智能汽车竞赛等众多重要竞赛都能很好的培养大学生对于机电一体化的兴趣与强化机电一体化的相关知识。
但很现实的状况是,国内不论是在机械还是电气领域,与国外的差距还是很明显的,所以作为机电一体化学生,必须加倍努力,为逐步赶上国外先进水平并超过之而努力。
方案论证1.电源模块设计方案方案一:利用电池的串行连接来提供一个合适的电压。
由于单电源模式下需同时对单片机和两个电机供电,故电机波动可能会影响单片机,进而导致测量、控制不准确。
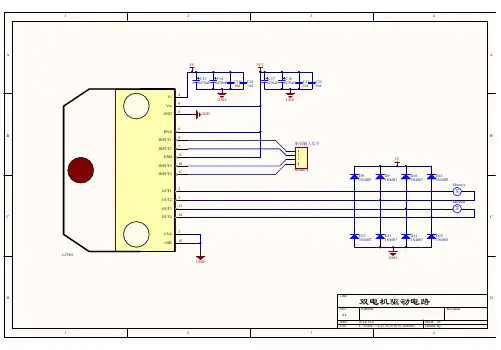
方案二:采用双电源供电,将电动机驱动电源与单片机以及其周边电路电源完全隔离。
用7805为电机提供稳定电压,另一方面用干电池对单片机及其他电路电源供电,这样做虽然不如单电源方便灵活,但可以使电动机驱动所造成的干扰彻底消除,提高了系统的稳定性。
2.电机驱动模块设计方案方案一:采用直流电机,配合LM298驱动芯片组合。
优点在于硬件电路的设计简单。
当外加额定直流电压时,转速几乎相等但由于不允许用LM298,所以不采用此方案。
方案二:采用直流电机配合由晶体管组成的H桥电路。
用单片机控制晶体管使之工作在占空比可调的开关状态,精确调整电机转速。
这种电路由于工作在管子的饱和截止模式下,效率非常高;H桥电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也很高,是一种广泛采用的调速技术。
3.循迹模块设计方案方案一:采用普通的发光二极管及光敏电阻组成的循迹方案。
其工作原理是:当无光照时,光敏电阻呈现高阻状态,电阻R2无压降三极管截止,三极管的集电极输出高电平;反之,当有光照的时候,光敏电阻接收到反射的光,其阻值下降,R2有压降三极管导通,输出低电平,利用高低电平可以判断控制小车的形程和方向。
本方案能达到基本的控制要求,但是它的缺点在于容易受到外界光线的干扰(可见光的反射效果跟地表的平坦程度、材料的反射情况有关),不易于控制小车的行迹,损坏了信号采集的效果。
方案二:采用RPR220型光电对管实现循迹方案。
利用红外线在不同颜色物体表面上具有不同的反射特点。
小车行驶过程中是循着黑线行走,因此采取反射光点循迹原理。
小车在行驶中不断向地面发射红外光,当遇到白色是即为漫反射,发射光被白色反射。
当遇到黑色时,发射光背黑色充分吸收。
利用此特点,小车将能正确的找到准确的路线。
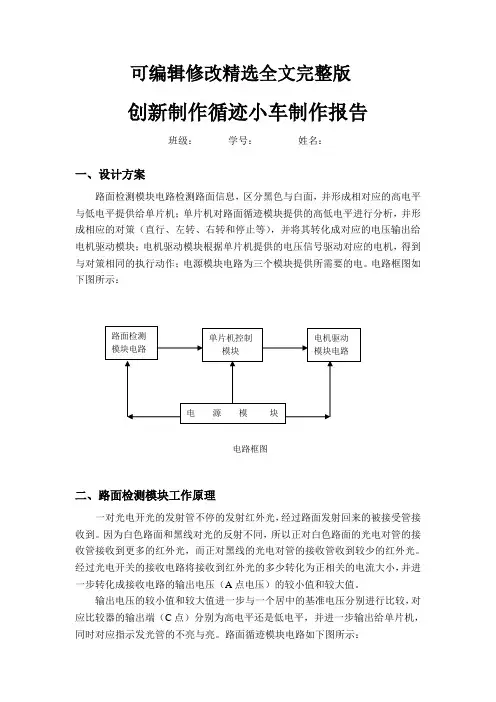
可编辑修改精选全文完整版创新制作循迹小车制作报告班级:学号:姓名:一、设计方案路面检测模块电路检测路面信息,区分黑色与白面,并形成相对应的高电平与低电平提供给单片机;单片机对路面循迹模块提供的高低电平进行分析,并形成相应的对策(直行、左转、右转和停止等),并将其转化成对应的电压输出给电机驱动模块;电机驱动模块根据单片机提供的电压信号驱动对应的电机,得到与对策相同的执行动作;电源模块电路为三个模块提供所需要的电。
电路框图如下图所示:电路框图二、路面检测模块工作原理一对光电开光的发射管不停的发射红外光,经过路面发射回来的被接受管接收到。
因为白色路面和黑线对光的反射不同,所以正对白色路面的光电对管的接收管接收到更多的红外光,而正对黑线的光电对管的接收管收到较少的红外光。
经过光电开关的接收电路将接收到红外光的多少转化为正相关的电流大小,并进一步转化成接收电路的输出电压(A点电压)的较小值和较大值。
输出电压的较小值和较大值进一步与一个居中的基准电压分别进行比较,对应比较器的输出端(C点)分别为高电平还是低电平,并进一步输出给单片机,同时对应指示发光管的不亮与亮。
路面循迹模块电路如下图所示:D1路面循迹模块电路三、单片机最小系统单片机最小系统包括了时钟电路和复位电路。
时钟电路为单片机工作提供基本时钟,复位电路用于将单片机内部各电路的状态恢复到初始值。
单片机是一个复杂的同步时序电路,为了保证同步工作方式的实现,电路应在唯一的时钟信号下严格地按时序进行工作。
时钟电路用于产生单片机工作所需要的时钟信号。
时钟信号的产生是在MCS-51系列单片机内部有一个高增益反相放大器,其输入端引脚为XTAL1,其输出端引脚为XTAL2。
只要在XTAL1和XTAL2之间跨接晶体振荡器和微调电容,就可以构成一个稳定的自己振荡器。
复位电路由一个按键、电解电容和电阻组成,它是使CPU 和系统中的其他功能部件都恢复到一个确定的初始状态,并从这个状态开始工作。
循迹小车原理基于51单片机的小车寻迹系统。
该系统采用两组高灵敏度的光电对管,对路 面黑色轨迹进行检测,并利用单片机产生PWM波,控制小车速度。
测试结果表 明,该系统能够平稳跟踪给定的路径。
关键词:智能小车;光电对管;寻迹;脉冲宽度调制在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简 易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电 路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮 电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路 面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出 相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框 图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的 反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模 块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质 的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时如果遇到黑线则红外光被吸收, 发生漫发射, 反射光被装在小车上的接收管接收;则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电 路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列 集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统 中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和 外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采 用非接触式检测方式。
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
这里的光电开关又叫光电对管(一个红外发射管和一个基极内接的感光三极管) 因为这是循迹小车我选用rpr220,我以上传电路图我补充一句光电耦合器原理也类似光电对管只不过把发光管和感光管镶嵌在内部,而且值得注意的是光电耦合器规格只有多少电压的,我没有听说有多少电流的,要用光耦还不如用三极管更直接。
其实不推荐使用光耦做驱动,我的电路就是使用l298n 驱动12v 电机顺便说一下,电路图里有一个电机接一个电容主要是针对电机调速,而我的电机灵敏度不好,加一个电容起缓冲作用,而l298芯片的电路典型法中没有。
我最近做了个循迹小车结题报告如下。
其实是否用光电隔离取决于你驱动的电机的电流大小如果电流不到1安不用光电耦合也行。
光耦驱动好像不行,不太稳定测速用码盘的话最好做的越密越好,否则实际运行中轮子会晃动等等很多原因使结果误差很大,因为一般光电开关都会有聚光器,很小的晃动都能感觉到循迹小车摘要:通过制作小车可以加深对单片机控制的熟练程度,同时初步学习项目开发的过程。
小车按照给定的路线行走,有定时,显示运行时间,计时,粗测行走距离等功能。
一、设计任务:1、设计要求(1)自动寻迹小车开始处于设置模式下,通过按键设置运行时间,完成设置时间后,按下开始键小车启动,同时显示当前运行的时间。
(2)小车按指定路线运行,自动区分直线轨道和弯路轨道,在指定弯路处拐弯,实现灵活前进、转弯等功能。
(3)小车行走在预设的时间后,自动停止,数码管显示行走的时间,3秒后显示行走距离。
(4)中途可以按右键强制停止,提前结束,显示行走时间,距离。
2、小车循迹的原理这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。