基于内模控制的PID控制器在大时滞过程中的应用研究
- 格式:pdf
- 大小:151.23 KB
- 文档页数:4
基于内模原理的PID控制器参数整定仿真实验1.内模控制内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好,易于在线分析。
它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
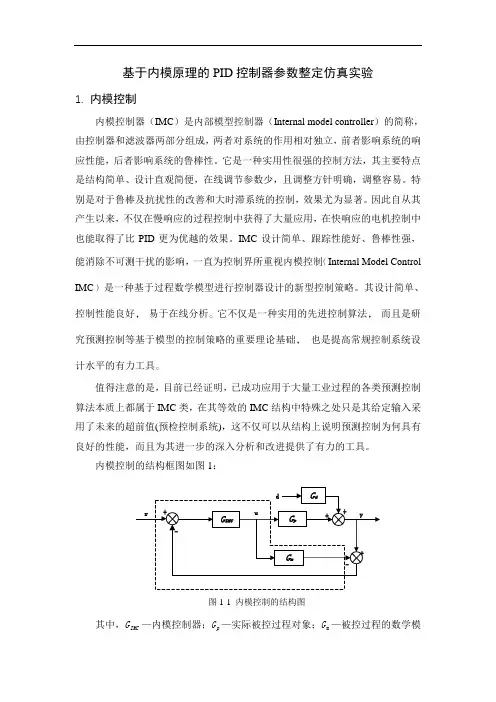
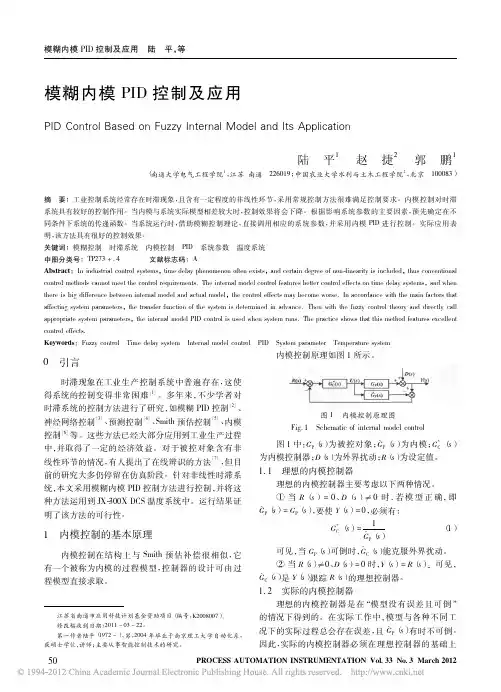
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
一种时滞过程内模PID控制器鲁棒整定方法
赵志诚;刘志远;张井岗
【期刊名称】《信息与控制》
【年(卷),期】2010(39)5
【摘要】针对典型的一阶时滞(FOPTD)、二阶时滞(SOPTD)以及一阶时滞积分(FODI)过程,提出了一种简便的内模PID控制器设计和参数整定方法.利用一阶泰勒级数逼近系统模型的时滞项,导出内模PID控制器参数表达式,且仅有一个可调参数β,该可调参数与系统的动态性能和鲁棒性直接相关.基于控制系统的鲁棒性能指标给出了控制器可调参数β进行鲁棒整定的解析表达式.仿真结果表明,该方法可使系统同时获得良好的设定值跟踪特性、扰动抑制特性和克服参数变化的鲁棒性.【总页数】5页(P526-530)
【关键词】时滞过程;内模PID;鲁棒性
【作者】赵志诚;刘志远;张井岗
【作者单位】哈尔滨工业大学控制科学与工程系;太原科技大学电子信息工程学院【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于误差性能指标的强时变时滞系统鲁棒PID继电自整定控制技术 [J], 沈国江;孙优贤;马婷芳
2.时滞光电跟踪系统鲁棒内模PID控制器设计 [J], 赵志诚;刘志远;张井岗
3.强时变时滞系统的鲁棒PID继电自整定控制技术 [J], 沈国江;刘翔;孔亚广;孙优贤
4.基于最大灵敏度的串级时滞过程控制器鲁棒整定 [J], 马文廷;张井岗;赵志诚
5.时滞系统PID控制器内模整定方法的扩展 [J], 龚晓峰;高衿畅;周春晖
因版权原因,仅展示原文概要,查看原文内容请购买。
基于内模原理的PID 控制器参数整定仿真实验1. 内模控制内模控制器(IMC )是内部模型控制器(Internal model controller )的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID 更为优越的效果。
IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好, 易于在线分析。
它不仅是一种实用的先进控制算法, 而且是研究预测控制等基于模型的控制策略的重要理论基础, 也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC 类,在其等效的IMC 结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
时滞多变量内模控制方法的研究的开题报告一、选题背景内模控制技术已成为现代控制领域的重要研究方向之一,内模控制技术可以在保证控制系统动态性能的前提下,消除传统PID控制器存在的欠采样、模型精度差等缺陷,从而可以实现更优化的控制效果。
然而,时滞多变量内模控制问题一直是控制理论中的难点和热点问题之一,尤其是在复杂的控制环境中,时滞问题更加复杂,因此如何在时滞多变量情况下有效应用内模控制技术,已成为当前控制领域的研究重心之一。
二、研究内容本文拟从时滞多变量内模控制的角度,以非线性系统为例,研究其控制策略。
具体研究内容包括:(1)构建时滞多变量内模控制系统的数学模型。
(2)设计基于内模控制的时滞多变量控制器,采用新型非线性自适应控制技术,考虑系统不确定性和扰动问题,使得系统在具有时滞和多变量的情况下能够保持良好的鲁棒性和控制性能。
(3)进行仿真实验以验证所提出的时滞多变量内模控制方法的有效性和性能。
三、研究意义该研究可以为时滞多变量控制问题提供一种新的解决思路,为内模控制技术的发展提供一种新的研究方向。
并且,本研究所得到的控制器的性能和鲁棒性将有望在实际工程应用中发挥重要作用,为工程实践提供一种有效的控制方案。
四、研究方法本文主要采用数学建模和仿真实验相结合的方法进行研究,主要的研究步骤包括:(1)建立时滞多变量内模控制系统的数学模型。
(2)设计时滞多变量内模控制器并在MATLAB中进行仿真实验。
(3)对仿真实验的结果进行分析和评估。
(4)不断优化控制系统,使其达到更优化的控制效果。
五、研究进度目前,已初步完成了系统的数学建模工作以及控制方案的初步设计,正在进行仿真实验的准备工作。
预计在6月底完成仿真实验,并进行数据分析和结果评估。
随后将进一步完善控制系统,以期达到更优的控制效果。
冶金能源ENERGY FOR METALLURGICAL INDUSTRY Vol.39No.5 Sept202054基于温度时滞的PID温控方法的研究与应用姜辉1佟欣2徐申1阎增范彳刘忠义°(1.中唯炼焦技术国家工程研究中心有限责任公司,2.营口理工学院,3.中国中钢集团有限公司,4.鞍山开炭热能新材料有限公司)摘要在实际工业生产过程中,时滞会对控制系统的性能产生不利影响。
改善时滞影响的PID控制方法是一个有着较大实际意义的课题。
文章基于温度时滞性,提出PID改善方法,实际应用表明,该控制方法能够适应温度过程控制,具有较强的鲁棒性。
关键词温度时滞PID控制鲁棒性文献标识码:A 文章编号:1001-1617(2020)05-0054-03Research and application of PID temperature control method basedon temperature delayJiang Hui1Tong Xin2Xu Shen1Yan Zengfan3Liu Zhongyi4(1.Zhongwei National Engineering Research Center For Coking Technology Co.,Ltd.,2.Yingkou Institute of Technology,3.Sinosteel Group Corporation Lim让ed,4.Anshan Kai t an一Reneng New Carbon Materials Co.,Ltd.)Abstract In the actual industrial production process,time delay has an adverse effect on the performance of control system.Improving the PID control method with time delay is a subject of great practicalsignificance.Based on the time delay of temperature,proposes a PID improvement method.The practical application shows that the control method can adapt to the temperature process control and hasstrong robustness.Keywords temperature delay PID control robustness炉窑的温度控制一直是科研领域研究热点,传统PID控制技术在炉窑温度控制中起关键作用。
毕业设计报告(论文)基于内模控制的PID在过程控制中的应用研究所属系化工与制药工程系专业化学工程与工艺姓名王大林指导教师陈夕松设计地点东南大学四牌楼校区动力楼119东南大学成贤学院毕业设计报告(论文)诚信承诺本人承诺所呈交的毕业设计报告(论文)及取得的成果是在导师指导下完成,引用他人成果的部分均已列出参考文献。
如论文涉及任何知识产权纠纷,本人将承担一切责任。
学生签名:日期:基于内模控制的PID在过程控制中的应用研究摘要内模控制是基于过程数学模型而进行控制器设计的一种新型控制策略。
内模控制具有很多优点,如设计简单,控制性能好,性能分析优越等。
随着工业过程自动化的普及,过程控制越来越受到控制界的广泛关注。
内模控制就是其中之一,它是以控制内部数学模型为基础,通过控制内部模型来达到控制整个系统稳定,进而达到工业过程生产指标的要求。
所以内模控制不仅是一种先进的控制算法,而且是研究预测控制模型的控制策略的重要理论基础!本论文基于东南大学过程控制实验室HGK-1型过程控制实验平台,以该平台中的液位过程为研究对象,设计基于可编程序控制器(PLC)的过程控制系统,采用内模控制(IMC)算法,仿真并实验研究IMC在该过程中的应用效果。
通过本次学习掌握IMC原理及算法,为以后在工作中的工程实际应用打下良好的铺垫!论文在介绍了HGK-1型过程控制实验平台后,阐述了液位过程建模的方法和特点。
在机理建模,试验建模和混合建模中选用试验建模方法建立了被控过程的数学模型。
设计液位过程PLC控制系统,包括液位计、流量计、调节阀、PLC输入/输出模块的接线,以及与PC机间的通讯连接。
仿真比较了IMC-PID控制及IMC的动态与静态性能。
为进一步提高控制系统的动静态性能,设计采用串级IMC控制方案,既提高了系统的动态特性,又保证了系统的稳态精度。
编写基于PLC的IMC应用软件,以及基于PC上位机的应用组态软件,实现液位过程的自动控制和监督管理,仿真和实验证明了该方案的有效性。
PID控制对线性时滞系统稳定性研究摘要包含线性时滞被控对象和PID控制器在内的反馈系统的稳定性已经有多年的研究,在众多论证方法中,奈奎斯特判据,Hermite-Biehler定理,根轨迹等方法最为常见。
此类研究的主要目的即是决定控制参数的稳定范围。
通过有限的整定步数来明确并表示出其域值范围和计算步骤只能借助一阶被控对象得以实现,且是一次时延被控系统。
这篇文章在旁德里亚金的研究结果上,拓展出任意阶被控对象都可适用的控制算法。
关键词PID;时滞;极值;稳定性在过程控制系统中,按误差信号的比例,积分和微分进行控制的调节器,简称PID调节器。
理论和实践证明了在连续控制系统中,对象为一阶或二阶惯性环节,同时带有滞后时间不大的滞后环节,PID控制显现出算法简单、鲁棒性好和可靠性高的优点。
本文从庞德里亚金极值定理出发,推演出任意阶被控对象均可适用的控制算法。
1递推公式图1给出了反馈结构的系统框图,在K是被控稳对象态增益,Ti和Zi是被控对象时间常数,L是确切被控对象的时滞环节,Kp,Ki及Kd 是PID控制器参数的情况下给出了相应处理器的传函P(s)和控制器的传函C(s)。
图1单位反馈控制系统框图要完成对一阶被控对象稳定区域的确切描绘可以借助由旁德里亚金定理衍生出的Hermite-Biehler定理,奈奎斯特判据及根轨迹的方法得到。
此外二阶被控对象可以用图解的方法得到,同样也有正确结果,但稳定性却不见得全是明晰的,也没有指定的有限计算步数。
所以,任意阶被控对象的研究还是用奈奎斯特判据,但要分别考虑给定Kp的P和PID控制器,以及保证稳定的过程参数的阶数。
通过控制器调节图的引入强调了确切表示出稳定区域边界的重要性。
下式给出系统的闭环传函:依据庞德里亚金的研究,对于正实部的稳定性而言T(s)必须要有限定的极点个数。
这就意味着是否分母的主函数apqspeqs与函数xp(s)共有的系数sp在左半平面具有所有的零点。
T(s)的分母除以pn(s)/L,因此分母可以写成:闭环传函T(s)的所有极点都是H(s)的零点,系统的稳定条件在于T(S)右半平面没有极点,H(s)的右半平面没有零点。
基于内模控制的PID 控制器在大时滞过程中的应用研究陶睿,肖术骏,王秀,朱学峰(华南理工大学自动化科学与工程学院,广州,510640)摘要:基于内模控制的PID 控制器,只有一个可调参数,且该参数直接与系统的闭环响应速度和回路的鲁棒性有关,克服了常规PID 控制参数整定复杂的缺点,易于为工程技术人员所掌握。
城市供水出水浊度过程是一个大惯性、大时滞、非线性、时变以及随机干扰多的难控对象。
而把IMC-PID 控制器应用在该对象上,仿真结果表明可以取得较理想的控制效果。
关键字:浊度控制; 大时滞过程; 内模控制; PID 控制; 中图分类号:TP273The Study on PID Controller Based on Internal Model Control in the Applications of LargeTime Delay SystemTAO Rui, XIAO Shujun, WANG Xiu, ZHU Xuefeng(S outh China University of Technology, College of Automation Science and Engineering,Guangzhou, Guangdong, 510640)Abstract: PID controller which based on internal model control can set the system using only one adjustable parameter. And the parameter direct related to the response speed of closed loop and the robustness of loop. It is better to conventional PID controller in noise immunity and complexity.The MIC-PID controller can greatly improve the control results and be easy to control by the engineers and technicians. The turbidity control system of municipal water supply system is a non-linear and time-variant process with a large time constant and large dead time ,which is always difficult to control. When adding the MIC-PID controller to it can obtain a better control effect.Key words: Turbidity control; Large time delay system; Internal model control; PID controller;1 引言 在现代工业过程的控制中,PID 控制算法的到了广泛的应用。
但是,常规的PID 控制在对大惯性大时滞系统的控制时,表现的控制效果并不理想,并且参数整定复杂,不利于对工业过程对象的控制。
特别是对于自来水厂的浊度控制,效果并不理想。
Rivera 等人首先将内模控制的思想引入到PID 控制器的设计中,并建立了滤波器参数与PID 控制器参数的关系。
------------------------------------------------------------------基金项目:广东省科技计划项目(2005B10201005) 2007佛山市禅城区产学研项目(2007B1038)文章把IMC-PID 控制引入到大惯性大时滞的城市供水系统中,克服了因难控过程混凝沉淀工序而带来的水质受损,具有较高的使用价值。
2 内模控制 2.1 内模原理[1][6]内模控制的基本结构如图1所示,图中P G 为实际被控对象,M G 为被控对象的数学模型,为内模控制器。
IMC G图1 内模控制器结构图图 图中,等价的反馈控制器为,()()1()(IMC c M IMC G s G s G s G s =−)(1)而图中系统的闭环响应为()()[1()()]()()1()[()()]P IM C IM C M IM C P M G s G r s G s G s d s y s G s G s G s +−=+−可见,当模型匹配时(即P G =M G ),且没有外界干扰(即d=0),此时系统的反馈信号为零,闭环系统的输入传递函数只由内模控制的结构的前向通道决定。
并且当M 1(s)=G s IMC G ()时,系统的输出无静差。
2.2 内模控制设计步骤[3-6]第一步:模型分解,即把M G 分解为M G −,两部分,+M G -=*+M M M G G G (2)其中是一个全通滤波器传递函数,有+M G j =1 M G ωω∀(),+ (3) 它包括了所有时滞环节和有半平面的零点;M G −是具有最小相位特性的传递函数,它稳定且不包含预测项。
第二步:定义IMC 控制器,(4)1*IMC M G G −−=f 其中f 是一个低通滤波器,其形式为,1()(1)rf s s λ=+ (5) 式中阶次r 取决于M G −的阶次使控制可实现,λ为滤波时间常数。
将(4)式代入(1)式可得()M s =1C rM G G S G λ++−-1-()(6)第三步:在工业控制中,经常采用不完全微分PID 控制算法,其控制器具有如下形式1()(11d c c i f T s G s K T s T s =+++ (7) 比较(6)(7),就可以得到IMC-PID 控制器的各参数, 0.5*()f c T T K K τλτ+−=+ (8)0.5i T T T f τ=+− (9) 0.5d i T T T f T τ=− (10) 0.5f T λτλτ=+ (11)3 IMC-PID 控制器在自来水厂浊度控制中的仿真研究控制自来水厂的出水浊度是保证水厂水质量的关键。
在此,采用IMC-PID 控制器对其进行控制仿真研究。
3.1 自来水厂常规处理工艺流程简述原水经泵房抽入水厂进水管道,将配制好的混凝剂矾液加入进水主管道,与原水混合后流入沉淀池,矾液在水中流动扩散形成矾花,将水中的胶体微粒和杂质等悬浮物凝聚沉淀,以降低水的混浊度,提高水质。
该过程是一个复杂的物理化学反应过程。
整个制水过程具有非线性、时变性、大时滞性等复杂特点,传统的PID 控制器难以取得令人满意的控制效果[2][4]。
3.2 被控对象描述在大多数工业过程中,对象模型都可以用一阶惯性加纯滞后对象来表示,即()1sK G s e Ts τ−=+, (12)城市供水出水浊度控制过程是一个大惯性、大时滞、非线性时变系统,但在工作点,它也可以近似为(12)所示的模型形式。
在广东省某自来水厂,采用阶跃响应法得到被控对象的响应曲线并测得被控对象的传递函数为:260.902()521sp G s e s −=+ (13)其中,时间常数和滞后时间的单位是分钟。
过程的放大倍数K 的单位是:(待滤水浊度的变化)/(控制量的变化)。
对于纯滞后环节通常采用三种方法进行近似:一阶pade 近似,二阶对称pade 近似,二阶非对称pade 近似。
对于大惯性大时滞系统,通过仿真研究表明,一阶近似和二阶近似区别很小,因此,为简化IMC-PID 控制器的设计,在此采用一阶pade 近似法[7],即,(10.5)(10.5)ss es τττ−−≈+ (14)按照如上所述的内模控制的设计步骤,就很容易得到自来水厂系统控制的整定参数。
据此,可以通过调节滤波时间常数λ的值,来对该对象进行控制。
4 仿真实验为了展示IMC-PID 控制器的效果,用Matlab 软件对自来水厂出水浊度进行了控制仿真研究,并把IMC-PID 控制算法与目前较流行的PID 控制器的Lopez 整定法,Cohen-Coon 整定法进行了比较,结果如下。
图2—4所示的是,当模型不匹配时,即K 、T 、τ分别30%时的MIC-PID 控制效果比较图(取±λ=τ)。
又根据经验知,一般在工程中,当K 增大、T 减小、τ增大(在本文中取τ=34 ,T 减小30% ,K 增大30%)是最难控制的。
图5给出了该情况下的内模控制效果图,其中λ=2.0τ---3.0τ。
可见,当系统的模型不匹配时,通过调节λ=2.5τ时,可以到较好的控制效果。
图2 K 变化±30%时,控制系统的效果图T 1.3T 0.7T图3 T 变化±30%时,控制系统的效果图Tau=26 Tau=34 Tau=18图4 τ变化±30%时,控制系统的效果图图5 K 增大、T 减小、τ增大时的控制效果 (λ=2.0τ---3.0τ,τ=34 T 减小30% K增大30%)(图中N=λ/τ)在下面图6中,分别采用IMC-PID 法和Lopez 整定法,Cohen-Coon 整定法对该系统进行了控制,得到了控制效果的比较图。
并且在仿真时发现,在上述图5所述的模型不匹配的情况时,基于MIC-PID 控制器整定法,可以通过调节λ=2.5τ时,可以到较好的控制效果。
而Lopez 整定法和Cohen-Coon 整定法[8]控制效果极差,已经是发散的了。
图6 三种方法的比较(IMC-PID 控制中λ=τ)5 结论从IMC-PID 控制在浊度控制的仿真结果可见,该算法需要在线调整的参数少(只有一个滤波时间常数λ),控制算法比较简单,易于为工程技术人员掌握。
在系统受到扰动的情况下,也有较强的抗干扰能力。
其控制效果明显优于Cohen-Coon 整定法和Lopez 整定法。
初步的仿真研究表明,将IMC-PID 用于像自来水厂出水浊度这种大惯性大时滞的工业对象,具有一定的潜在应用价值。
参考文献:[1] D E Rivera, M Morari, and S Skogestad.Internal model control---4.PID controller design [J]. Ind.Eng.Chem.Pro.Des.Dev., 1986,25.252-265N=2.5 [2] 郭佩佩 .基于BP 神经网络的水厂加药凝絮过程辨识研究[J]. 计算机与应用化学2008 25(7) 889~992N=3.0 N=2.0[3] 严兴华等 IMC-PID 在大惯性大滞后系统中的应用及仿真[J].广东有色金属学报 2006.16(3):217~220[4] 王伟,甘艳珍,刘桂香,朱学峰.MFA 与PID控制器的实验比较研究[J].自动化仪表. 2008.29(5):27~29[5] 刘红军等 基于内模控制的PID 控制器的设计[J].计算机仿真 2004.22(3):207~210[6] 黄静 潘立登,基于内模控制的PID 控制系统的研究与应用(D ).北京:北京化工大学 2006[7] 刘金琨.先进PID 控制及其MATLAB 仿真(第二版)[M].北京:电子工业出版社.2004 MIC-PID 整定法 Lopez 整定法 Cohen-Coon 整定[8] 何衍庆,俞金寿,蒋慰孙. 工业生产过程控制[M],北京:化学工业出版社, 2004。