IEEE1588精密时钟同步关键技术研究
- 格式:pdf
- 大小:534.25 KB
- 文档页数:3

影响IEEE 1588时钟同步精度的关键因素IEEE 1588时钟同步是一种实时系统中十分重要的技术,它可以帮助系统达成更高的时钟精度。
然而,由于该系统的复杂性,在应用IEEE 1588时钟同步技术时,同步精度受到多个因素的影响,这些因素有时测量起来很难,因此引起了人们对其准确性的质疑。
本文将着重介绍影响IEEE 1588时钟同步精度的关键因素,便于识别它们,并帮助改善系统的同步精度。
首先,通信延迟和网络延迟对IEEE 1588时钟同步精度有着非常重要的影响。
IEEE 1588时钟同步是一种基于网络的精密同步技术,它将计算机网络中的节点连接在一起,并使它们同步。
因此,网络延迟会直接影响IEEE 1588时钟同步精度。
通信延迟也会影响IEEE 1588时钟同步精度,因为它会导致数据包在物理层上的传输延迟,而IEEE 1588时钟同步是基于物理层的,所以网络延迟会影响IEEE 1588时钟同步的质量。
其次是设备的抖动,也就是指设备的时间会有一定的不稳定性。
这是由于设备在工作时会受到周边环境的干扰,如温度、湿度等环境变化,导致设备的时间不准确,如果抖动值过大,就会严重影响IEEE 1588时钟同步精度。
另外,网络拓扑结构也会影响IEEE 1588时钟同步精度。
IEEE 1588时钟同步是一种基于网络的时钟同步技术,它也是非常依赖于具体网络拓扑结构的,因此网络拓扑结构越复杂,IEEE 1588时钟同步精度就会越低。
最后,由于IEEE 1588时钟同步也非常依赖于网络容量,因此网络容量的变化也会影响它的精度。
网络容量指的是网络带宽,当它增加时,节点的传输速率也会增加,该系统的时钟精度也会有所提高,反之则会降低。
综上所述,实时系统中IEEE 1588时钟同步精度被多种因素影响,包括网络延迟、设备抖动、网络拓扑结构和网络容量等。
要想提高IEEE 1588时钟同步的精度,就必须明确这些影响因素,并积极采取多种措施改善系统的精度。

IEEE 1588精确时间协议在智能变电站中应用的关键技术【摘要】IEEE 1588精确时间同步协议(PTP)解决了通用以太网延迟时间和同步能力差的瓶颈,在自动化、通信等工业领域具有重要意义,本文介绍了IEEE 1588标准在智能变电站建设中应用的关键技术,包括PTP时钟同步模型以及同步过程,分析了PTP网络结构中的设备类型以及主从时钟的偏移和网络延时的修正,最后分析了PTP时钟设备冗余配置的必要性,给出了时钟设备冗余配置的方法。
【关键词】IEEE 1588 PTP 智能变电站时钟同步目前,在变电站自动化系统中广泛应用的对时方式主要有GPS同步脉冲对时,NTP(Network Time Protocol)网络时间协议,SNTP(Simple Network Time Protocol)简单网络时间协议对时等对时方式。
随着数字化变电站的发展使得站内二次硬接线逐渐被串行通信线所取代,GPS对时技术已不适用于新兴的数字化智能变电站网络系统,而NTP/SNTP时间同步协议的时间同步精度仅能到到ms 级,不能满足具有高精度和稳定性要求的电力自动化设备的需求,因此最终提出了IEEE 1588标准,它定义了一种用于分布式测量和控制系统的精密时间协议(Precision Time Protocol,PTP),其网络对时精度可达亚μs级,满足电力系统自动化设备对时间精度的要求,并且所占用网络和硬件资源较少,因此IEEE 1588网络对时方式是应用于智能变电站的理想对时方式[3]。
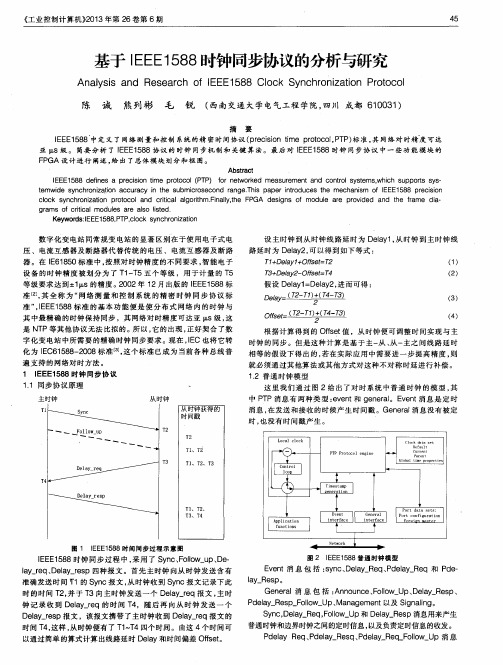
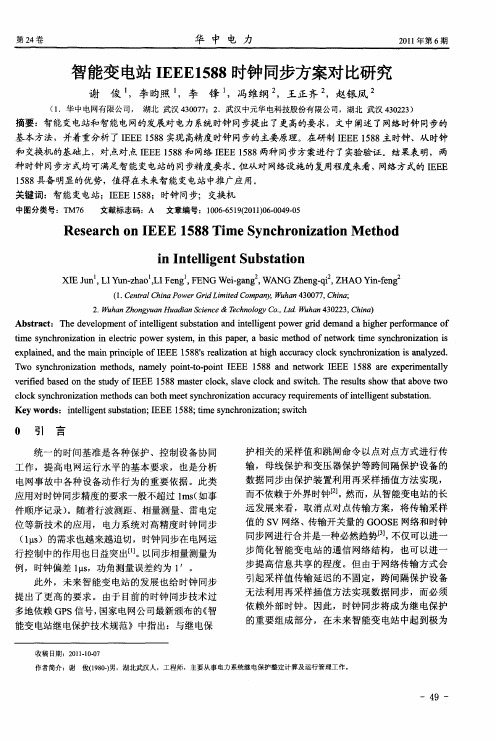
1 PTP时钟同步模型PTP系统是分布式网络系统,由PTP设备和非PTP设备组成。
下图1为一个典型的PTP分布式系统。
其中,OC(Ordinary Clock)为普通时钟,普通时钟可能是一个系统的最高级主时钟(Grandmaster Clock,GC),也可能是主、从时钟体系中的从时钟(Slave)。
BC(Boundary Clock)为边界时钟,PTP设备通过网络彼此通信,PTP协议在一个叫做域的逻辑范围内运行。
第33卷第6期2017年12月上海电力学院学报Journal of Shanghai University of Electric PowerVol.33,No.6Dec. 2017DOI:10. 3969/j.iss n.1006 -4729.2017. 06. 014影响IEEE 1588时钟同步精度的关键因素赵勇,高彦杰(上海电力学院电子与信息工程学院,上海200090)摘要:针对IE E 1588精确时钟同步协议及系统仿真模型进行了深人的研究.研究结果表明,主时钟或从时钟的晶振漂移对同步精度误差产生相同程度的影响,仅主时钟(或从时钟)晶振漂移参数变化与同步精度误差变化关系近似为线性,其变化率约为4. 0 0 10 _5,同步周期时间对同步精度误差影响可分为两个部分,当同步周期小于1.6 s时,对精度误差影响相对较小;而当同步周期大于1.8 s时,同步精度误差随同步周期增加呈现急剧上升的趋势.关键词:晶振漂移;IE E 1588协议;同步周期中图分类号:TN919.34;T P73.5 文献标志码:A文章编号:1006 -4729(2017)06 -0581 -05Analysis of Key Factors Affecting the Accuracy ofIEEE 1588 Clock SynchronizationZHAO Yong,GAO Yanjie(School of Electronics and Information Engineering,Shanghai University of Electric Power,Shanghai200090,China)Abstract:The effects of crystal clock frequency drift and synchronization on synchronizationaccuracy of IEEE 1588 master and slave clocks through simulations ae studied.Results show thatfrequency drift on the master or slave side has the same impact on synchronization accuracy.Giventhe changes of frequency drift parameter on only one side,synchronization accuracy curve changeslinearly at the rate of4. 0 x10_5.The impact by synchronization interval can be divided in regions.When the interval is less than1.6seconds,synchronization accuracy changes at a relatively slow rate.When the interval is larger than 1.8seconds,synchronization accuracy deteriorates dramaticaly.Key words:crystal frequency drift;IEEE1588 protocol;synchronization interval随着电力自动化系统的发展和分布式网络 的广泛应用,对于系统的时间同步精度要求越来越高.比如在线路行波故障测距中要求时间同步误差小于1us.IEEE 1588是关于网络测量 和控制系统的精确时间协议[1],可实现高精度的时间同步.IEEE 1588协议规定了主从时钟通 过周期性地交换带有时间戳的报文,根据这些 报文,从时钟计算出其与主时钟的时间和频率偏差,通过对从时钟自身进行调整,以达到时钟 同步的目的.目前对IEEE 1588时间同步精度的收稿日期:2016 -03 -16通讯作者简介:赵勇(1991 -),男,在读硕士,安徽宣城人.主要研究方向为IE E 1588协议及其电力系统应用.E-mail:824752152@ .582上海电力学院学报2017 年研究大都以硬件开发平台为主[2],关于IEEE 1588时间同步的软件仿真平台相对较少,并且 一般都是针对<EE 1588协议某一个方面的研 究.例如张城等人[3]提出了一种<EE 1588时钟 同步仿真模型,其中的主从时钟都是用关于时 间的一次函数来代替,其主要目的是研究PI 参 数优化对同步精度的影响& ZDENEK Chaloupka 等人[4]提出了一种基于时钟的<EE 1588协议 仿真模型,它仅局限于协议中报文时间戳产生 部分.文献[5]提出了一种较为完整的IEEE 1588时钟同步软件仿真系统.本文将利用这个 经过校验的仿真平台完成对IEEE 1588时间同 步效果的仿真实验并进行仿真分析,得到主从时钟晶振精度、同步周期等因素对IEEE 1588同 步系统的时间同步效果的影响,由此提出在实 际应用中可以用来提高同步精度的措施.1时钟同步系统仿真模型IEEE 1588时钟同步系统模型如图1所示.从功能上可将其分为3个模块,即:晶振模块&协 议模块&从时钟伺服控制模块.晶振模块产生标准 晶振频率和晶振噪声,然后输入到协议模块进行 相应的处理后产生主从时钟时间戳,从时钟伺服 控制模块得到主从时钟时间戳后,进行主从时钟 同步运算,得到从时钟误差调整量,再对从时钟进 行调整,以完成主从时钟同步.从时钟晶振晶振s[n]+A[n]+y[n]图1IEEE 1588时钟同步系统11晶振模块现有IEEE 1588协议研究中的晶振模型一 般简化为高斯噪声模型[6].为了更加贴合实际 情况,本文采用了公认的幂率谱晶振模型[7].对 于一个晶振频率源,设标称频率为/〇,瞬时频率 为/,定义瞬时相对频率偏差(晶振噪声)为 5),则/ -/〇5")= -在幂率谱晶振模型中,5 )的功率谱密度可 表示为:sy "f ) = h _J&Gh _J&G由式(1)可以看出,晶振噪声由5种噪声组 成:h _2项为随机游走调频噪声& h _ 1项为闪变调频 噪声&#〇项为白色调频噪声项为闪变调相噪 声&h #项为白色调相噪声.在晶振仿真中可以用 高斯白噪声通过不同的整形滤波器得到上述5种 晶振噪声.其幂律谱系数分别为:h _2 i 1. 24e -赵勇,等!影响IEEE 1588时钟同步精度的关键因素583 17,#_% i 5. 925e - 16, #$ i 3. 216e - 15, #%i6.85e-16,#2 =2.18e-17[8].1.2协议模块IEEE 1588协议的消息传递过程如图2所示.需要注意的是,该模块有3个时间参考,分别为主时钟晶振频率、从时钟晶振频率和理想时钟频率.图2 IEEE 1588协议从时钟、主时钟和理想时间之间的关系图2中,主时钟以VP4为周期发送同步报文,VP4是以主时钟频率为参考的量,相对应,以时钟频率(/s)为参考时间的量为!-+],以理想频率(/R)为参考时间的量为!)[+ ].它们之间的关系为:A-+ ]+ ]R =s^r Vck一/M[+]p4⑵图2中,主时钟发送SYNC报文时间戳为V'+],相应的,从时钟计数器时间为8'+ ],从时钟接收SYNC报文时间戳为V[+ ],从时钟发 送DELAY_REQ报文时间戳为V'+ ],主时钟接 收DELAY_REQ报文时间戳为V'+] •根据<EE 1588协议,它们可分别表示为:V[+] =V[+ -!]+Vck8'+ (=8 [+-1] + A-'+ (V[+] =8[+] +%[+](3)V[+] =V[+] +&s[+]=8[+] +%s[+] +&s[+]V[+] =V[+] +%M[+] +&M[+] +y M[+] (&)式中:%[+]——从时钟测量的正向延迟,表示报文由主时钟发送至从时钟所需要的时间;&s[+]——从时钟测量的处理延迟,表示从时钟接收SYNC报文到发送DELAY_DEQ报文所需要的时间;'M[+ ]——主时钟测量的反向延迟,表示DELAY_DEQ报文从从时钟发送到主时钟所需要的时间,并且在V[+]中需要将正向延迟和处理延迟变换成主时钟时间.正向延迟、处理延迟和反向延迟的理想时间 量与相应主从时间量之间的换算公式为:(,S[+] =&&^)[+](')式中:(^[+ ]——经换算得到的相应主从时间量;)[+]——正向、反向和处理延迟的理想时间量.通过上面的分析得到IEEE 1588协议主时钟 和从时钟simulink仿真模型如图3所示.1.3从时钟伺服控制模块从时钟伺服控制系统[9_1()]如图1虚线部分 所示.它首先对协议模块中得到的4个时间戳 (乃,12,13,&)进行如下计算.由主(从)时钟发 送(接受)SYNC报文时间戳得到主从时钟延迟 (/m2S):/@2s = V _ V;由从(主)时钟发送(接 受)DELAY_DEQ报文时间得到从主时钟延迟(/2m):/〇m = V _ V.计算中假设传播延迟是对 称的,这样就产生了消息传播延迟(/p$p)及从时 钟偏移量(/"ffse t):=(V-V)+(V - V)^p ro p—"从时钟偏移量/"ff〇t通过零阶保持器和PI控 制器两个模块后产生从时钟的矫正量,再对从 时钟进行调整,使其达到与主时钟同步.584上海电力学院学报2017 年0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0同步周期/ s图5同步周期变化对同步精度的影响图4主从时钟晶振准确度变化2 IEEE 1588仿真实验分析2.1晶振准确度对同步精度的影响在IEEE 1588时间同步系统中,主从时钟的时钟频率由晶振产生,而对于不同的晶振有着不同的 频率准确度.表1是常见频率标准的准确度.表1常见频率标准的准确度类别频率准确度普通型10 e -5石英晶体温度补偿型10e -6 ~ 10e -8频率标准单层恒温型10e -7 ~10e -9双层恒温型10e -8 ~10e -10原子频率标准铷原子频率标准10 e -10 ~10 e -11氢原子频率标准10 e -12商品型铯原子频率标准10 e -12 ~10 e -13晶振的准确度是分析IEEE 1588时间同步必 须考虑的因素.本仿真将主从时钟晶振的准确度 范围为0〜2.0 X 10 _4,主从时钟标准频率均是50MHz ,同步周期为125 ms .为了简化,将正向、反 向和处理延迟时间均设定为常数,分别为:20e -6 s ,1e -6 s ,25e -6 s .仿真得到不同准确度的主从时钟晶振的时钟同步精度三维图如图4所示.图4中,当主(从)时钟准确度固定,从(主) 时钟由0到2.0 X 10变化时,时钟同步精度值 不断变大,由此得到主从时钟的晶振准确度越 高,相应的时钟同步系统的收敛精度也越高.因 此,在实际应用中可以尽量提高主从时钟的晶 振精度.因准确度越高成本也越高,故在实际应 用中要根据不同的应用环境选择不同的晶振.2.2同步周期对同步精度的影响在IEEE 1588协议中,主时钟周期性地向从时钟发送同步报文,并通过报文交换,得到完成时 钟同步的数据.这个发送同步报文的周期也就是 主从时钟的同步周期.同步周期是可以人为设定 和调控的.本文通过对同步周期的调整来研究同 步精度的变化情况.其中,同步周期为0.05〜2 s 变化,主从时钟均是50 MHz ,±5.0 X 10—5晶振, 为了简化,将正向、反向和处理延迟时间均设定为 常数,分别为20e -6 s,1e -6 s ,25e -6 s .最终得 到的仿真结果如图5所示.赵勇,等:影响IEEE 1588时钟同步精度的关键因素585图5中,当时钟同步周期从0.05 ~20变化 时,收敛精度值增大,并且时钟同步周期在0.05 / 1.6s期间,收敛精度以较小增幅增长;当时钟同 步周期在1.6 ~2S期间,收敛精度突然成指数式 增长.由此可知,同步周期越长,整个时钟同步系统的收敛效果越差,且在某一个同步时间会发生指数式的变化.因此,在实际应用中我们要控制同步周期在一个合理的范围内,尽量控制同步周期 在一个较小的值内.3结语本文引用了一个相对完整并且经过验证的 IEEE1588时钟同步仿真平台,该平台采用了公 认的晶振模型.以此平台为基础,研究分析了主从 时钟晶振的晶振准确度变化对同步精度效果的影 响,结果表明,主时钟或从时钟的晶振漂移对同步 精度误差产生的影响程度相同,主时钟(或从时 钟)晶振漂移参数变化与同步精度误差变化关系 近似为线性,其变化率约为4.0 010_5.此外,同步周期时间对同步精度误差影响可分为两个部 分,当同步周期小于1.60时,对精度误差影响相 对较小;而当同步周期大于1.80时,同步精度误 差随同步时间增加,呈现急剧上升的趋势.下一步 的工作主要是对时钟伺服控制模块中的PI控制器的参数优化,以及运用滤波器等手段对时钟伺 服控制模块进行优化和改进.参考文献:'1(EIDSON J,KANGL.1588—2008—<EE standard for a precision clock synchronization protocol for networked measurement and control systems'J]•Irnprirnerie Nouvelle,7Berth-od,2008(2):98-105.'2]黄健,刘鹏,杨瑞民.IEEE1588精确时钟同步协议从时钟 设计'!].电子技术应用,2010,36(7):91-97.[3]张城,陈隆道,文昊翔.基于IEEE 1588协议的从时钟同步控制算法研究'!].工业控制计算机,2012,25(12):83-85. [4 ]VDENEK Chaloupka,NAYEF Alsindi,JAMES Aweya.Efficient and precise simulation model of synchronization clocks inpacket networks'】].IEEE CAMAD,2013,39(10A):79-83.[5 ]赵勇,高彦杰•Investigations on simulation platform for IEEE1588 precision time synchronization[C]//CST,2016.[6 ]FONTANELLI D,MACII D,WOLFROM P,(A clockstate estimator for PTP time synchronization in harsh environmental conditions[C]//IEEEISPCS,2011:99-104.[7 ]YUANLisong,CHEN Xiaolong,WANG Jiali.A practicalsimulation method for generating phase noise of oscillators[J].ICMIC,2013(1) :132-136.[8 ]尚红娟.时间频率同步的优化控制方法研究[D].西安:西安科技大学,2010.[9 ]林永君,李境达,李通,等.基于IEEE1588协议的从时钟设计及其控制研究[!].电力科学与工程,2014,30(9):53-58. [10]刘见,靳绍平,李敏,等.基于IEE 1588协议的高精度时钟对时设计[!].电子技术应用,2014,40(4):48-51.(编辑胡小萍)。

IEEE1588的高精度时间同步算法的分析与实现IEEE1588,也被称为精确时间协议(PTP),是一种用于网络中实现高精度时间同步的协议。
它在各种工业应用和通信系统中被广泛采用,因为它可以提供微秒级甚至亚微秒级的精度,满足了许多应用的实时性要求。
首先,IEEE 1588协议需要在网络中选择一个主时钟(Master Clock),作为时间同步的源头。
主时钟拥有最高的时间精度,并将其时间信息通过数据包广播给其他时钟节点。
其他节点被称为从时钟(Slave Clock),它们通过接收到的时间数据来调整自身的时钟,并与主时钟保持同步。
在主时钟启动时,它会周期性地发送特殊的数据包,称为同步事件(Sync Event)。
这些数据包包含了主时钟的当前时间戳,从时钟接收到这些数据包后,会记录接收时间戳。
当从时钟收到一定数量的同步事件后,它会计算出与主时钟的相对时间差,并根据这个时间差来调整自身的时钟。
为了确保时间同步的准确性,IEEE 1588采用了两个重要的概念,即时钟同步和时间戳校准。
时钟同步通过周期性的同步事件来实现,从而减小网络延迟带来的时间误差。
而时间戳校准则通过周期性地发送延迟请求(Delay Request)和延迟响应(Delay Response)数据包来估计网络延迟,并相应地调整时间戳。
在实际的实现中,IEEE1588通常使用硬件支持或软件实现的方式。
硬件支持一般通过专用的电路芯片或FPGA来实现,它们能够提供更高的时间精度和更低的延迟。
而软件实现则是在通用的计算机上运行,通过操作系统和网络协议栈来实现时间同步功能。
在软件实现中,IEEE1588通常依赖于操作系统的时钟服务和网络协议栈。
操作系统的时钟服务提供了计算机系统的时间信息,并提供了时间戳的功能。
网络协议栈则负责封装和发送数据包,并处理收到的数据包以提取时间戳信息。
在实现中,需要考虑以下几个关键问题:1.时间同步精度:在实现中,需要根据具体应用的要求选择合适的时钟源和自适应算法,以达到所需的精度。
GPON系统1588时间同步技术的研究与应用汪坤;刘华【摘要】GPON作为移动通信的基站回传方案需要支持高精度的时间同步, 本文首先简单介绍了IEEE 1588v2协议基本机制,然后分析了在GPON系统中实现1588的几大难点,并介绍了烽火GPON特殊系统框架下的时间同步实现方案架构,给出了可靠的测试数据,最后针对GPON系统时间同步还存在的问题提出了针对性的建议.%As the solution of wireless backhaul, GPON has to support high accuracy time synchronization. This paper briefly introduces the basic mechanism of IEEE 1588v2 protocol firstly. Secondly, it analyzes several major difficulties of realizing 1588 in GPON system. Then it describes the time synchronization implementation schema of Fiberhome's special GPON system frame, and provides reliable experimental data. At last, this paper makes specific recommendations for existence problem of time synchronization in GPON system.【期刊名称】《电子设计工程》【年(卷),期】2015(023)020【总页数】4页(P56-59)【关键词】基站回传;时间同步;IEEE1588v2;GPON;内部同步机制【作者】汪坤;刘华【作者单位】武汉邮电科学研究院湖北武汉 430074;烽火通信科技股份有限公司湖北武汉 430073【正文语种】中文【中图分类】TN929.11近年来,随着3G技术的普及和4G时代的来临,无线业务出现了爆炸式的增长。
the Application of Computer Technology •计算机技术应用Electronic Technology & Software Engineering 电子技术与软件工程• 149【关键词】IEEE1588 时钟同步系统 PIDEE1588同步协议的主要想法是同步网络设备(客户)的时钟与主控制时钟,把软硬件紧密耦合,从而实现亚微秒级时间同步的精度。
主要应用于以太网中的设备时钟同步,但不限于以太网,也能实现其它网络中的时钟同步功能,同时结合PID 进行相位调整的方法,使其更加精确。
1 PID的基本内容PID 控制是目前应用最广泛的控制方法。
该系统运行可靠,结构简单,具有一定的稳定性。
只有三个参数需要设置:根据系统偏差E(t )(即设定目标值R (t )与实际输出值Y (t )之差),利用系统内部比例、积分和微分三种计算方式,将三种功能的结果结合起来。
以获得输出U (T )控制系统,实现控制效果。
在PID 控制中,比例环节的作用是按比例减小偏差值E (t )。
而积分环节则是用来消除静差,提高系统的精度和无差的程度,在PID 控制中,积分作用的强度与数值成反比;微分环节是反映偏差值变化的指标。
当超调量过大时,可增加校正指令,防止对系统的不利影响,缩短调节时间,改善动态特性。
通过以上环节的结合,理论上可以达到较好的控制效果。
PID 控制的有效性取决于数学模型的精度,但实际工程问题大多是时变非线性的,存在许多不确定性,因此传统的PID 控制往往难以适应实际工况,性能较差。
2 IEEE1588时钟同步系统的原理及实现2.1 简述IEEE1588时钟同步系统的原理它以主从模式工作,时钟校准是根据时钟的同步信息完成的。
主时钟发送同步消息具有周期性,从时钟会依据收到消息的具体的时间戳信息来计算消息传输的时间、延迟甚至是主从线上的时钟偏移量,从而对本地的时间进行相应的调整,使从时钟与主时钟之间保持在同一时间。
IEEE1588v2高精度时钟同步协议的总体设计与实现王冠;肖萍萍【摘要】With the development of network technology, the gradually networked audio transmission set higher demands on asynchronous ethemet In provied high precision time to guaranty the real-time of transmission of audio data. Fortunately, IEEE 1588 is precisely designed to solve this problem. This article systematically describes the principle of IEEE1588 (version 2), and presents the general design of IEEE1588v2 in the angle of software implementation.%随着网络技术的发展,音频传输逐渐网络化,为保证音频数据传输的实时性,对异步的以太网提出了高精度的时间同步要求.而IEEE1588标准定义的PTP(Precision Time Protocol)协议正是为实现高精度时钟同步而制定的,本文系统地介绍了IEEE1588v2(第二版本的PTP协议)的原理,并从软件实现的角度给出了IEEEI588v2的总体设计.【期刊名称】《价值工程》【年(卷),期】2012(031)015【总页数】2页(P198-199)【关键词】音频传输网络;时钟同步;IEEE1588v2;PTP;精确时间协议【作者】王冠;肖萍萍【作者单位】武汉邮电科学研究院烽火网络有限公司,武汉430074;武汉邮电科学研究院烽火网络有限公司,武汉430074【正文语种】中文【中图分类】TN919.20 引言目前,基于以太网的数字音频传输技术已得到广泛应用,而以太网生来就是非确定性的网络,很难满足音频数据在传输过程中的同步和实时性要求。
设计与应用计算机测量与控制.2010.18(7) Computer Measurement &C ontrol1585收稿日期:2010-01-03; 修回日期:2010-02-10。
作者简介:孔令彬(1962-),男,博士,教授,主要从事无线电电子技术与智能控制技术方向的研究。
文章编号:1671-4598(2010)07-1585-02 中图分类号:T P393文献标识码:AIEEE1588精密时钟同步关键技术研究孔令彬,文赫胜,陈向文(中国地质大学机电学院,湖北武汉 430074)摘要:随着网络控制技术的发展,分布式控制系统对时钟同步精度提出了更高要求;以IEEE1588精密时钟同步标准为背景,阐述了高精度时钟同步机制和时钟校正原理,分析了IEEE 1588协议的核心算法 最佳主时钟(BM C)算法和本地时钟同步(LCS )算法,同时从技术开发的角度对系统中同步精度的影响因素如时间戳的生成方式,网络的对称性等作了分析,并提出了一些减少干扰,提高系统时钟同步精度的改进方法。
关键词:IEEE1588;时钟同步;主时钟;时间戳Research on Key Technology of IEEE1588Precision Clock SynchronizationKong Lingbin,Wen H esheng ,Chen Xiangw en(Depart ment o f M echanical and Electro nic Engineer ing,China U niv ersity of Geo sciences,Wuhan 430074,China)Abstract:Distributed control s ystem are set for higher requirements of clock synchronization w ith the development of netw ork control technolo -gy.By IEEE1588principles,high-accuracy time synchronizati on and the clock correc tion mechanis m are elaborated.The Best M aster Clock Algo -rithm and Local Clock Synchronization Algorithm in IEEE1588are analyzed.Clock s ynchronous accuracy influencing factors are also discussed from technology development aspect.M ethods for increasing the control system clock synchronization precision are proposed.Key words :IEEE 1588;clock synchronization ;master clock;time stamp图1 主从时钟状态机0 引言IEEE1588是用于网络测量和控制系统的精密时钟同步协议标准,是新一代测控总线L XI 标准的重要组成部分。
为了满足测量仪器、工业控制等领域中亚微秒级的时间同步要求,IEEE1588标准在这方面作出了重大贡献,目前的最新V 2标准于2008年7月发布[1]。
IEEE1588标准的全称是 网络测量和控制系统的精密时钟同步协议标准(IEEE1588Pr ecision Clo ck Sy nchro niza -t ion Pr otoco l) ,简称P T P (P recisio n T iming P roto col),它的基本原理是通过一个同步信号周期性对网络中所有节点的时钟进行校正同步,可以使基于以太网的分布式系统达到亚纳秒级的精确同步。
与已有的时间同步技术如N T P/SNT P 、GP S 等相比具有配置容易,快速收敛,精度高以及对网络带宽和资源消耗少等特点[2]。
在对时间同步要求比较严格的应用场所,如工业实时以太网,电力自动化系统,移动通信网络中,逐渐引起人们的关注。
1 IEEE1588时钟同步机制1 1 PTP 时钟状态机PT P 时钟同步系统是由主时钟和从时钟构成的一种主从关系的网络层次结构,它由一个或多个PT P 子域组成,每个子域包含一个或多个彼此通信的时钟。
在网络中的每一个PT P 时钟都有可能处于从时钟(Slave Clo ck)或主时钟(M aster Clock)这两种状态,时钟状态由最佳主时钟(BM C)算法决定。
处于主时钟状态的设备被认为精确时钟,它将同步从时钟的时间,但在同一个通信子域内只能存在一个主时钟。
P T P 时钟状态转换关系如下图1所示。
在PT P 网络系统中各个时钟设备通过周期性交换带有时间信息的同步(sy nc)报文来进行主从时钟间偏差(Offset)和网络时延(Delay)的计算,进而纠正偏差,补偿时延,实现主从时钟之间亚纳秒级的同步[1]。
当一个时钟上线,它在系统指定的时间内监听来自主时钟的Sync 消息。
(1)如果收到来自主时钟的Sy nc 消息,则本地时钟进入Slave 状态;(2)如果一段时间内没有收到Sync 消息,该时钟则假定自己为主时钟,此时的状态为Pre _Master,时钟端口表现为主时钟的状态,但是不发送Sync 消息;这个Pre _Master 状态会保持一定的时间,如果在指定的时间内仍没有收到其它时钟的Sync 消息,则该时钟状态为主状态Master,并且发送Sync 消息。
时钟各端口都执行最佳主时钟算法确定自己和网络内其它时钟的状态[2]。
如果时钟的某个处于从状态Slave 的端口确定它能比现在的主时钟质量高,则呈现主时钟的状态并发送Sy nc 消息,主时钟的一个端口收到更好的Sync 消息,则停止宣布自己为主时钟并停止发送Sync 消息。
从时钟端口通过与主时钟交换报文信息获得正确时间来更新本地时钟的时间,以达到与主时钟同步。
1 2 PTP 时钟同步与本地时钟同步(LCS)算法对于已经确定主从关系的时钟网路,将根据本地时钟同步(L ocal Clock Synchr onization)算法校准本地时钟节点与主时钟同步,其流程如图2所示[3]。
主、从时钟之间存在Sync,Delay Req,Fo llow up,D elay Resp 4种类型的报文交换,报文交换期间产生4个发送或接收时刻值,此动作称之为打时间戳事件,这4个数值用来计算偏差和时延以同步从时钟。
在测量过程中,假设传输介质是对称均匀的,从时钟先通过报文传输的往返迭代得出路径延时(delay),然后计算出主、从时钟的时间偏移(offset),最后对从时钟进行同步调节。
图2 时钟同步示意图在图2中:(1)从时钟在T C2时刻收到主时钟发送的Sync 广播报文。
(2)在T S3时刻,从时钟收到主时钟发送的携带同一回合Sync 报文发送时间T M1的Fo llow U P 报文,从时钟与主时钟的时间偏移T o ffset 为:T o ffset =TS2-T M 1-T delay(1)图3 状态决定算法流程图(3)从时钟在T C4时刻向主时钟发送Delay Req 报文。
(4)在T S5时刻,从时钟收到主时钟发送的与同一回合的Delay Req 报文相对应的Delay Resp 报文,其包含了主时钟收到Dela y Req 的时刻t M 4,其延时T delay 为:T delay =T o ffse t +T M4-T S4(2)将延时T delay 带入式(1)可以得出T offs et ,进而可以对从时钟进行调节[1]。
2 最佳主时钟(BMC)算法最佳主时钟算法(Best M aster Clo ck A lgo rithm)独立运行于PT P 系统中的每个时钟上,主要完成选举主时钟和生成时钟网络拓扑结构两个任务,它们分别由数据设置比较算法(Data Set Compariso n A lg or ithm )和状态决定算法(State Decisio n A lgo rithm)来实现。
2 1 数据设置比较(DSC)算法数据设置比较算法根据同步报文不同的数据集(包含时钟品质、时钟等级、时钟类型、时钟偏移等参数信息的变量集合),比较筛选出可用最佳报文,确定最佳主时钟,进而产生拓扑结构。
它是动态运行于每个时钟上的,即在时钟同步系统运行中根据实时数据不断计算比较时钟选举数据集,动态调整各节点和端口的状态,也就会调整时间的传递路线。
所以在当前主时钟故障或性能下降时,系统可能会选择其它更合适的节点替代它作为主时钟[1]。
表征时钟品质的变量值通过A llan 均方差公式得出。
Allan 方差公式原用于振荡器频率的统计误差计算,这里用于表示时间的统计误差:2ptp=1312(N -2)N-2k=1(Xk +2-2X k+1+X k )2(3)式(3)中, 2ptp 是多次测量的均方差值。
其中X k ,X k +1,X k+2是在t k ,t k + ,t k +2 时刻所作的时间残差测量, 是测量的时间间隔,N 是测量的次数。
统计方差公式已排除任何稳定的对称误差,时钟的漂移并不会影响方差 2ptp ,但时钟的不规则跳动直接影响 2p tp 值。
2p tp 值再经过取对数,乘以时间常数和滞环处理才成为数据集中使用的时钟变量参数。
2 2 状态决定(SD)算法状态决定算法是在确定所属PT P 子域主时钟后,根据不同数据集的信息进一步计算出每个时钟各个PT P 端口的具体推荐状态。
每个PT P 端口都可能处于以下9种状态,包括IN IT IAL -IZING 、FAU LT Y 、DISABL ED 、L IST ENIN G 、PRE _MA S -T ER 、M AST ER 、PA SSIVE 、UN CA LIBRAT ED 、SL AVE ,本地时钟根据这些状态去做出对应的调整。
为避免网络生成回路,状态决定算法会生成树形拓扑结构,将一些竞争失败的节点端口定义为禁用(disabled)状态和被动(passive)状态[1]。
设某一典型的时钟节点C 0由默认数据设置Do 来描述,且该时钟有M 个PT P 端口。
首先比较同一路径上所有端口D 0数据集的时钟等级clock stratum,若相同则通过数据设置比较算法比较各端口发出的有效同步报文,决定这些报文中的Er -best (接收信息的最好值),最后比较各Erbest 的路径长度,最终从剩下的N 个Er best 中选出Ebest (所有信息最好值)。