机器人学-并联机构的基础理论
- 格式:ppt
- 大小:3.19 MB
- 文档页数:31
并联机器人机构学的现代分析与综合理论推荐单位:教育部项目简介:本项目属于机械工程科学技术领域。
并联机构在军事和民用都有重要应用,存在结构复杂、强运动耦合和强非线性等特点,是知识密集型机构,也是并联机器人的核心科学问题,并成为机器人研究领域的重要国际前沿课题。
本课题组经过20多年的研究,建立了并联机构现代分析与综合的通用理论。
主要内容有:(1)建立基于螺旋理论的少自由度并联机构构型综合理论,并系统地综合出全部9种类型机构100多种; (2)提出了基于螺旋理论普遍适用的机构自由度分析方法,解决了现代和历史上大量矛盾的机构;(3)提出了机构主螺旋的解析识别方法并研究了机构运动螺旋节距及轴线的分布规律;(4)提出了性能与构件尺度关系的并联机构空间模型理论,可获得尺度在无穷大范围内变化的全局最优的设计结果;(5) 提出并建立了并联机构的运动影响系数理论,它奠定了整个并联机器人运动和动力分析的理论基础;(6)系统研究了并联机构奇异位形及其发生规律,发现了6/6型并联机构的主奇异位形,完整奇异轨迹及其结构特性,还研究了非奇异姿态空间;(7) 研究了并联机器人动力学的多方面问题。
整个研究的科学价值是形成了有学术特色的系统的'并联机器人机构学的现代分析与综合理论'。
该项目发表论文380篇,其中主要论文139篇,含国际杂志50篇,国际会议72篇。
专著5部。
获发明专利25项。
三大检索共收录240篇,其中SCI收录54篇,EI 149篇。
'十篇文献'他引379次。
(本项目全部他引总计877次:国际他引共313次,其中SCI他引181次,《中国科学引文库》他引564次)综合同行们的评价:评论者包括美国等12个国家的许多著名学者和教授。
他们一致肯定了我们的多方面研究,有的认为我们在某方面'取得了又一个重要的进展'、是'一个更加一般性的分析'、认为我们的研究使得'过去两年发生了值得注目的变化';特别是Rico教授在美国机械工程学会的年会上发表的文章认为我们的研究是'最近的十到十五年,在并联机构的型综合中的5个重要的理论贡献'之一。
并联机器人原理1. 引言随着科技的不断发展,机器人在各个领域中的应用越来越广泛。
并联机器人作为机器人领域的一个重要分支,在工业自动化、医疗手术、航天等领域中发挥着重要作用。
本文将介绍并联机器人的原理、结构和应用,并从机构设计、运动学分析、动力学模型等方面进行深入探讨。
2. 并联机器人的定义和分类并联机器人是指由两个以上的机器人并联组成的机器人系统。
根据其结构和运动特点的不同,可以将并联机器人分为平台式并联机器人、串联式并联机器人和混联式并联机器人。
2.1 平台式并联机器人平台式并联机器人由一个移动平台和多个执行器组成,执行器通过机械连接装置连接到移动平台和工作台之间。
它具有高精度、高刚度和高灵活性的特点,在精密加工、装配和仿真等应用中得到广泛应用。
2.2 串联式并联机器人串联式并联机器人由多个运动杆件组成,杆件通过运动副连接在一起,形成一个连续链式结构。
串联式并联机器人通过杆件之间的相对运动实现工作台的运动,具有较大的工作空间和自由度,适用于需要较大工作范围和高精度运动的应用。
2.3 混联式并联机器人混联式并联机器人是平台式和串联式并联机器人的结合,既可以实现平台式并联机器人的高刚度和高精度,又能够实现串联式并联机器人的大工作空间和自由度。
混联式并联机器人在飞行器研究、空间站维修等领域具有广泛应用。
3. 并联机器人的机构设计并联机器人的机构设计是实现其运动特性的关键。
机构设计主要包括支撑结构、传动机构和执行机构。
3.1 支撑结构支撑结构是并联机器人的基础,负责支撑整个机器人系统的重量和载荷。
支撑结构应具有足够的刚度和稳定性,以保证机器人在工作过程中的精度和稳定性。
3.2 传动机构传动机构是实现并联机器人运动的关键组成部分,可以通过齿轮传动、皮带传动、链传动等方式实现。
传动机构应具有较高的传动精度和可靠性,以保证机器人的运动精度和稳定性。
3.3 执行机构执行机构是并联机器人的动力来源,可以是液压驱动、电动驱动或气动驱动等。
串联和并联机器人运动学与动力学分析串联和并联机器人是工业自动化领域中常见的机器人结构形式。
它们在不同的应用场合中有着各自的优势和适用性,因此对它们的运动学和动力学进行深入分析具有重要意义。
本文将从运动学和动力学两个方面对串联和并联机器人进行分析,并对它们的特点和应用进行了介绍。
一、串联机器人的运动学和动力学分析1. 串联机器人的运动学分析串联机器人是由多个运动副依次连接而成的,每个运动副只能提供一个自由度。
其运动学分析主要包括碰撞检测、正解和逆解三个方面。
(1)碰撞检测:串联机器人在进行路径规划时,需要考虑各个运动副之间的碰撞问题。
通过对关节位置和机构结构进行综合分析,可以有效避免机器人在工作过程中发生碰撞。
(2)正解:正解是指已知各关节的角度和长度,求解末端执行器的位姿和运动学参数。
常见的求解方法包括解析法和数值法。
解析法适用于关节均为旋转副或平动副的情况,而数值法则对于复杂的几何结构有较好的适应性。
(3)逆解:逆解是指已知末端执行器的位姿和运动学参数,求解各关节的角度和长度。
逆解问题通常较为困难,需要借助优化算法或数值方法进行求解。
2. 串联机器人的动力学分析串联机器人的动力学分析主要研究机器人工作时所受到的力、力矩和加速度等动力学特性,以及与机器人运动相关的惯性、摩擦和补偿等因素。
其目的是分析机器人的动态响应和控制系统的设计。
(1)力学模型:通过建立机器人的力学模型,可以描述机器人在工作过程中的动力学特性。
常用的建模方法包括拉格朗日方程法、牛顿欧拉法等。
(2)动力学参数辨识:通过实验或仿真,获取机器人动力学参数的数值,包括质量、惯性矩阵、摩擦矩阵等。
这些参数对于后续的控制系统设计和性能优化非常关键。
(3)动力学控制:基于建立的动力学模型和参数,设计合适的控制算法实现对机器人的动力学控制。
其中,常用的控制方法包括PD控制、模型预测控制等。
二、并联机器人的运动学和动力学分析1. 并联机器人的运动学分析并联机器人是由多个执行机构同时作用于末端执行器,具有较高的刚度和负载能力。
并联正文:1.简介本文档是一个并联的详细说明,包括的结构、工作原理、控制系统等方面的内容。
2.结构2.1 机械结构并联的结构由多个关节和连杆组成,其中关节连接主要的动力元件,连杆连接各个关节。
机械结构的设计需要考虑的运动范围、负载能力以及稳定性等因素。
2.2 末端执行器并联的末端执行器通常包括夹爪、工具等,用于完成特定的任务,如抓取、装配等。
3.控制系统并联的控制系统主要包括硬件和软件两个部分。
3.1 硬件硬件部分包括传感器、驱动器和控制器。
传感器用于对的姿态、位置等进行测量,驱动器用于驱动机械结构的关节,控制器则用于运行控制算法并实施控制策略。
3.2 软件软件部分包括运动规划、路径规划等算法的开发与实现。
通过软件控制,可以使在特定的工作空间内完成精确的运动任务。
4.工作原理并联通过控制系统的指令实现工作任务,其工作原理基于运动学和动力学原理。
的工作过程需要考虑运动学约束、静力学约束等因素。
4.1 运动学的运动学描述的位置和姿态之间的关系。
运动学约束主要包括正向运动学和逆向运动学。
4.2 动力学的动力学描述在外部力作用下的运动学特性。
动力学约束主要包括速度和加速度的限制。
5.应用领域并联广泛应用于汽车制造、航空航天、医疗卫生等领域。
的高精度、高效率和精确性使其成为许多工业任务的理想选择。
附件:本文档涉及的附件包括相关设计图纸、算法代码等。
法律名词及注释:1.并联:由多个关节和连杆组成的结构,具有高度精确性和高效率的特点。
2.运动学:描述的位置和姿态之间的关系的科学。
3.动力学:描述在外部力作用下的运动学特性的科学。

并联机构及机器人并联机构(Parallel Mechanism,简称PM),定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
特点是所有分支机构可以同时接受驱动器输入,然后共同决定输出。
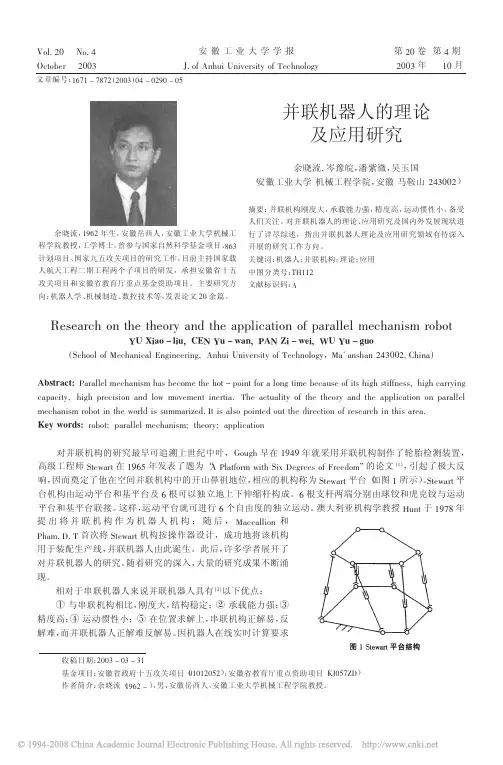
1931年,Gwinnett在其专利中提出了一种基于球面并联机构的娱乐装置(图1);1940年,Pollard在其专利中提出了一种空间工业并联机构,用于汽车的喷漆(图2);之后,Gough 在1962年发明了一种基于并联机构的六自由度轮胎检测装置(图3);三年后,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,这种机构也是目前应用最广的并联机构,被称为Gough-Stewart机构或Stewart 机构。
并联机构的特点:(1)与串联机构相比刚度大,结构稳定;(2)承载能力大;(3)微动精度高;(4)运动负荷小;(5)在位置求解上,串联机构正解容易,但反解十分困难,而并联机构正解困难反解却非常容易。
从运动形式来看,并联机构可分为平面机构和空间机构;细分可分为平面移动机构、平面移动转动机构、空间纯移动机构、空间纯转动机构和空间混合运动机构。
另可按并联机构的自由度数分类:(1 )2 自由度并联机构。
(2 )3 自由度并联机构。
(3 )4 自由度并联机构。
(4 )5 自由度并联机构。
(5 )6 自由度并联机构。
2自由度并联机构,如5-R,3-R-2-P(R表示旋转,P表示平移)。
平面5杆机构是最典型的2自由度并联机构,这类机构一般具有2个平移自由度。
3自由度并联机构种类较多,形式复杂,一般有以下形式,平面3自由度并联机构,如3-RRP机构、3-RPR机构、它们具有2个旋转自由度和1个平移自由度;3维纯平移机构,如Star Like并联机构、Tsai并联机构,空间3自由度并联机构,如典型的3-RPS机构、属于欠秩机构。
并联机器人的设计讲义并联机器人是一种由多个自由度机械臂通过并联机构连接并协同运动的机器人系统。
它通过将多个自由度机械臂的末端连接在同一平面上或在三维空间内,实现更高自由度的运动灵活性和操作精度。
本文将介绍并联机器人的设计讲义。
一、机器人整体结构设计1.机器人基座和支撑结构:机器人的基座是机器人的主要支撑结构,需要具备足够的稳定性和刚度。
基座采用高强度材料制造,并结合有限元分析进行优化设计;2.并联机构设计:并联机构是机器人的核心构件,用于连接多个自由度机械臂。
设计并联机构时需要考虑运动灵活性和刚度之间的平衡,以及机构的可制造性;3.自由度机械臂设计:自由度机械臂是并联机器人的执行器,用于完成各种操作任务。
机械臂的设计需要考虑负载能力、工作范围和操作精度等因素;4.控制系统设计:机器人的控制系统包括传感器、控制算法和驱动器等。
根据任务需求选择合适的传感器和控制算法,并设计相应的驱动系统。
二、运动学建模与分析1.机器人的运动学建模:通过建立机器人的联动关系和几何条件,得到机器人各个运动部件之间的运动学方程;2.运动学分析:利用运动学方程分析机器人的位置、速度和加速度等运动特性,包括正逆运动学分析和运动学仿真。
三、动力学建模与分析1.动力学建模:通过建立机器人的动力学方程,研究机器人在执行任务过程中的力矩、力和加速度等动力学特性;2.动力学分析:利用动力学方程分析机器人的受力、运动规律和运动过程中的惯性力等特性;四、控制系统设计1.模型驱动控制:根据机器人的动力学和运动学模型,设计相应的控制算法,实现对机器人的运动控制;2.传感器选择和数据采集:根据任务需求选择合适的传感器,如力传感器、位置传感器等,并设计数据采集系统;3.控制器设计:设计合适的控制器来实现对机器人的高精度控制,并选择合适的驱动器来驱动机器人的各个关节;4.控制算法优化:根据实际应用需求,对控制算法进行优化和改进,提高机器人的运动控制性能。
《并联机器人》课程实验大纲课程编号:7328-9总学时/实验学时:32/4,48/4,一、教学目标与基本要求(一)教学目标《并联机器人》课程实验是围绕课程理论教学内容开设的实践性教学环节,是该课程的重要组成部分,通过实验教学,应能深化课程理论教学的相关知识,促进课程的理论教学,加深学生对课程理论的理解和加强有关理论的应用。
通过实验,掌握试验原理和方法,提高学生并联机器人的设计与应用能力。
(二)基本要求通过本课程实验,应能使学生认知并联机器人的组成、连接结构,掌握并联机器人的机构运动简图绘制、并联机器人的工作空间分析和动平台的位姿检测的原理和方法。
二、基本理论与实验技术知识实验一、并联机器人的机构运动简图绘制实验并联机器人的机构运动简图绘制实验是根据并联机器人的机构运动简图和并联机器人的自由度的理论进行实验。
实验中主要用到并联机器人的机构运动简图、并联机器人的自由度计算、并联机器人的运动确定性的技术。
实验二、并联机器人的工作空间实验并联机器人的工作空间实验是根据并联机器人的工作空间的理论进行实验。
实验中主要用到并联机器人的工作空间分析、动平台的位姿检测和并联机器人的误差的技术。
三、实验方法、特点与基本要求(一)实验方法采用理论分析和实验验证的方法。
(二)实验特点学生分组完成实验,老师指导。
(三)实验基本要求(1)服从实验指导教师的管理,遵守实验室安全管理制度和设备操作规程,注意安全。
(2)分组独立完成实验。
(3)实验前认真预习,熟悉实验相关内容。
不得乱动与本实验无关的实验设备与器材。
(4)按照实验步骤进行实验,认真观察和思考,爱护实验设备。
(5)课后认真及时完成实验报告,实验报告格式规范、内容正确,表述完整,数据正确,附必要的图。
(6)实验结束后,学生进行实验仪器的整理和场地的清洁等工作。
四、主要仪器设备实验一、并联机器人的机构运动简图绘制实验(1)硬件(2)软件并联机器人的机构运动简图绘制实验指导书。