一、(光电耦合)摄像
二、激光雷达
发射多股激光光束,并依靠前行车反光镜的反射时间来测定其 距离。但是由于要对前方车辆进行辨别,因而开始采用扫描式激光 雷达不但至前方车的距离可测,而且其横向方向的位置也可以检测 出来。此技术的进一步发展,可使扫描角度成°。这时,如果在车 辆四角设置类似的扫描式激光雷达,那么车辆四周的障碍物都可以 测出
路上以每小时上百公里速度行驶时,超声波测距无法跟上车距实时变 化,误差大。
.、方向性差,发散角大。由于发散使能量大大降低,另一方面使 分辨力下降,导致将邻车道的车辆或路边的物体作为测量目标
结论: 由于上述问题,超声波雷达应用在汽车倒车方面。在倒车过程中,
可实现对汽车尾部左后,右后数米以内障碍物和突然闯入危险区域内 的行人的自动探测并告警。
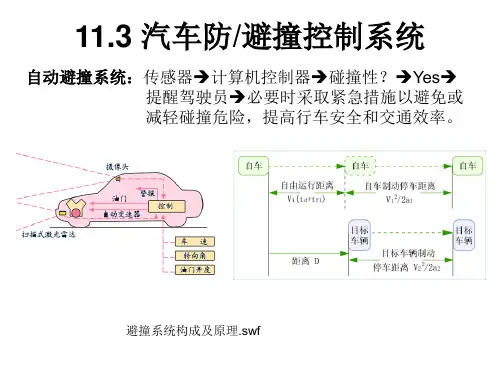
自动避撞系统由输入装置、控制单元组成。输入装置由激光雷达、速 度传感器、横向加速度传感器组成,提供车辆行驶情况的信息;控制单元 计算跟车距离并确定报警距离;显示单元显示当前距离根据报警距离发出 警报。
防撞控制系统框图(主动避撞系统)
、防撞传感器
汽车防碰撞技术首先需要解决的问题是汽车之间的安全距离。汽车 与汽车之间的距离小于安全距离,就应该能够自动报警,并采取制动措 施。目前的距离测量采用的技术手段有超声波测量、红外线测距、激光 测量、机器视觉和雷达技术
几款倒车雷达
四、电磁波传感器及信号处理电路
对于车载雷达,一般选用 、 、 波段,对应的波长为毫米级,故成为毫米 波雷达
特点: 毫米波雷达采用的是波长在厘米以下,频率以上的高频电磁波,波长
短,沿直线传播且穿透能力强,几乎不受气象条件的影响。不但可以探测 目标的距离,还可测出相对速度和方位。价格昂贵,需要防止电磁波干扰 由于存在其它通讯设施电磁波干扰以及雷达装间的相互影响,容易发生误动 作.
![汽车防撞单片机控制系统研制(答辩)[PPT课件]](https://uimg.taocdn.com/feaffe9101f69e314232948d.webp)