三维投影变换
- 格式:ppt
- 大小:424.50 KB
- 文档页数:3
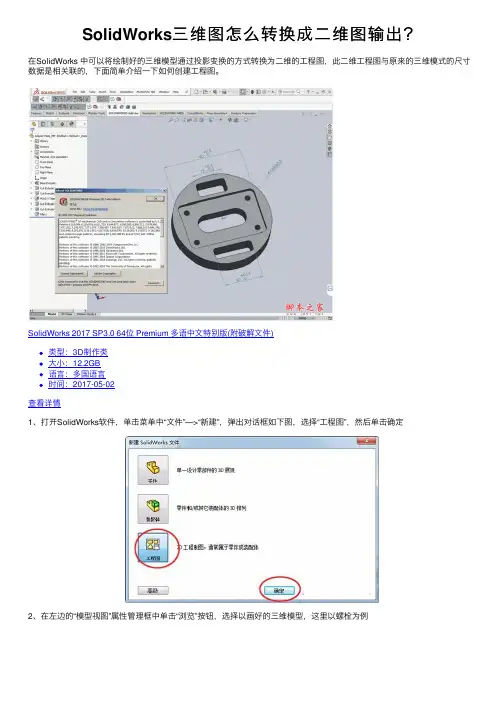
SolidWorks三维图怎么转换成⼆维图输出?
在SolidWorks 中可以将绘制好的三维模型通过投影变换的⽅式转换为⼆维的⼯程图,此⼆维⼯程图与原来的三维模式的尺⼨数据是相关联的,下⾯简单介绍⼀下如何创建⼯程图。
SolidWorks 2017 SP3.0 64位 Premium 多语中⽂特别版(附破解⽂件)
类型:3D制作类
⼤⼩:12.2GB
语⾔:多国语⾔
时间:2017-05-02
查看详情
1、打开SolidWorks软件,单击菜单中“⽂件”—>“新建”,弹出对话框如下图,选择“⼯程图”,然后单击确定
2、在左边的“模型视图”属性管理框中单击“浏览”按钮,选择以画好的三维模型,这⾥以螺栓为例
3、将螺栓三维模型按主视图、俯视图、左视图和三维⽰意图的顺序依次放置在图纸中,如下图
4、在⼯具栏中选择“智能尺⼨”按钮,依次在三视图中标注螺栓尺⼨,如下图
5、然后在右下⾓标题栏中添加元件名称(如螺栓)等元件信息,如下图
6、⾄此,我们就将⼀个三维模型转换成⼆维图纸形式,⽅便元件的加⼯和安装。
空间几何的非线性变换空间几何是研究几何对象在三维空间中的性质和变换的一个分支。
线性变换是空间几何中非常重要的一种变换,它能够保持点、线或者平面的位置、方向、长度和角度等性质不变。
然而,在实际应用中,很多情况下需要进行非线性变换,例如在计算机图形学、计算机视觉、自然语言处理等领域就需要对图像、语言等非线性信息进行处理。
本文将重点介绍空间几何的非线性变换。
1. 刚体变换刚体变换是最简单的非线性变换之一。
刚体变换包括平移、旋转和镜像三种基本操作,它们能够保持点之间的距离和夹角不变。
例如,二维平面上的一条直线,如果进行平移、旋转、镜像操作后,依然是一条直线。
当然,在三维空间中进行刚体变换需要更复杂的运算。
刚体变换在计算机图形学的建模和动画制作中有广泛的应用。
2. 仿射变换仿射变换是一种保持直线平行的非线性变换。
它包括平移、旋转、比例和错切四种基本操作。
仿射变换能够保持平面上的点、线和平面的位置和方向不变。
对于一个不共线的三角形,它经过仿射变换后仍然是一个三角形。
仿射变换在计算机视觉、机器学习等领域有很多应用,例如在图像对齐、文本识别和人脸识别中都需要进行仿射变换。
3. 投影变换投影变换是指将三维空间中的物体映射到二维平面上的过程。
投影变换可以是线性和非线性的,其中较常用的是透视投影和正交投影。
透视投影是一种模拟人眼看物体的方法,它能够产生近大远小的效果,常用于3D建模、游戏开发和虚拟现实等领域。
正交投影能够保持物体的形状和大小不变,常用于制作工程图和CAD软件中。
4. 变形变换变形变换是一种将物体进行形状变换的非线性变换。
变形变换包括弯曲、扭曲、拉伸等形变操作,它能够改变物体的形状和大小。
例如,在计算机图形学中,可以使用变形变换对人脸进行变形,从而实现面部表情的动态模拟。
总之,空间几何的非线性变换在现代科技中有着广泛和重要的应用。
通过对非线性变换的研究,我们能够更好地理解和利用三维空间中的几何信息。
未来,随着技术的不断发展和进步,空间几何的非线性变换将会在更广泛的领域中得到应用。
CAD中投影与视图变换方法在使用CAD软件进行设计和绘图时,投影和视图变换是非常重要的技巧。
它们能够帮助设计师更加准确地表达和展示设计图纸。
本篇文章将介绍CAD中的投影和视图变换方法。
一、投影方法1. 平行投影平行投影是CAD中最常用的投影方法之一。
它通过将物体投影到水平、垂直或倾斜的平面上,来呈现物体的形状和尺寸。
在CAD软件中,选择平行投影命令后,需要指定投影平面和观察点。
然后,选择需要投影的物体,即可生成对应的投影。
2. 透视投影透视投影是一种更加真实而立体的投影方法。
它能够模拟人眼在观察物体时所看到的景象。
透视投影可以给人一种立体感和深度感,使设计图更加生动。
在CAD软件中,选择透视投影命令后,需要设置观察点、观察角度和观察距离等参数。
然后,选择需要投影的物体,即可生成透视投影。
二、视图变换方法1. 平面视图平面视图是将三维物体在一个平面上的投影。
常见的平面视图有前视图、后视图、左视图、右视图、顶视图和底视图。
平面视图能够清晰地展示物体在各个方向上的尺寸和形状。
在CAD软件中,选择平面视图命令后,需要指定视图平面和观察点。
然后,选择需要展示的物体,即可生成对应的平面视图。
2. 剖视图剖视图是指将物体切割,并展示其内部结构的一种视图。
它能够更加详细地展示物体的内部构造和部件布局。
在CAD软件中,选择剖视图命令后,需要设置切割平面和切割方向。
然后,选择需要剖视的物体,即可生成剖视图。
3. 倾斜视图倾斜视图是相对于主视图或正交视图而言的一种斜视视角。
它能够展示物体在某个特定角度下的形状和尺寸。
倾斜视图可以使设计图更加立体和生动。
在CAD软件中,选择倾斜视图命令后,需要设置观察角度和倾斜方向。
然后,选择需要展示的物体,即可生成倾斜视图。
除了以上介绍的投影和视图变换方法,CAD软件还提供了许多其他的功能和命令,如旋转视图、缩放视图和镜像视图等。
这些功能可以根据具体的设计需求进行选择和使用。
总结起来,投影和视图变换是CAD软件中非常重要的技巧。
三维投影变换的MATLAB实现唐飞;杨伟;查长礼【摘要】三维图形变换需要对形体顶点的齐次坐标矩阵进行复合计算,计算繁琐且变换过程晦涩抽象,使用传统的程序设计语言实现图形变换的可视化非常困难.因为在三维图形变换中引入MATLAB工具,利用其强大的矩阵运算能力和丰富的图形处理能力,能够快速准确地计算矩阵和输出图形,清晰直观地展现图形变换的方法和过程.【期刊名称】《安徽理工大学学报(自然科学版)》【年(卷),期】2016(036)002【总页数】4页(P36-39)【关键词】三维图形变换;矩阵;MATLAB;投影;计算机图形学【作者】唐飞;杨伟;查长礼【作者单位】安庆师范学院物理与电气工程学院,安徽安庆246133;安庆师范学院物理与电气工程学院,安徽安庆246133;安庆师范学院物理与电气工程学院,安徽安庆246133【正文语种】中文【中图分类】TH126.2几何图形是CAD系统中的基本元素,无论以何种方式建立的模型,最终都需要转换为几何图形进行显示和输出。
几何图形由顶点坐标、顶点间的拓扑关系和组成图形的线面模型共同决定[1]。
图形变换是计算机图形处理的基础,是计算机图形学的重要组成部分,图形的处理、显示和形体构造等都需要使用到图形变换。
图形变换的实质是对图形顶点的坐标进行变换,这种变换不改变图形各元素的属性和它们之间的拓扑关系,仅改变各点的坐标。
三维图形变换包括比例变换、对称变换、错切变换、平移变换、旋转变换、投影变换和透视变换等基本变换,更复杂的变换可以通过基本变换组合而成。
每一个变换都可以表示为矩阵计算的形式,通过矩阵的相乘构造更复杂的变换[2]。
在图形变换中需要进行大量的矩阵运算,计算繁琐且变换过程晦涩抽象,使用C语言等传统的计算机语言实现可视化程序设计十分困难。
因此在图形变换中使用MATLAB软件,利用其强大的矩阵运算能力和丰富的图形处理能力,快速准确地进行矩阵计算和图形输出,直观地展现图形变换的方法和过程。
投影的公式投影是一种常见的几何变换,它可以将一个曲面几何体映射到平面坐标系中,概念上来说简单易懂,但在实际中,其函数变换形式非常复杂。
投影可以分为正投影与逆投影,它们都与投影函数(投影映射)有关,投影公式也是这两种变换形式的关键。
正投影是将一个几何体投射到平面,逆投影是把平面投到几何体中,具体的数学表达式是:正投影变换: P (x,y,z) = (x’, y’, 0)x’ = x * f / zy’ = y * f / z其中,f是一个投影系数,可以控制投影变换的缩放程度。
逆投影变换: P’ (x’, y’, 0) = (x, y, z)x = x’ * z / fy = y’ * z / fz = f从上面的公式可以看出,投影变换是一种非常复杂的函数变换,涉及到多种参数的计算,这也是它在机器视觉中的应用所需要的重要数学基础。
投影变换最广泛的应用是机器视觉,也就是使用摄像机将现实的物体变换成计算机可以理解的数学模型。
投影变换将摄像机的三维空间映射到二维坐标系中,这样可以让计算机更加容易地理解现实环境,从而实现不同类型的机器视觉任务。
投影变换涉及到从三维空间到二维坐标系的映射,这是一个非常复杂的过程。
在实际的应用中,投影变换的准确性会受到很多因素的影响,如摄像机的位置、环境光照等。
因此,正确地计算投影变换的参数,尤其是系数f,是机器视觉系统准确性所必须的基础。
投影变换也在视觉传感器应用中被广泛使用,利用其精确映射特征点、形状、物体等是识别物体的重要一步。
即使是一些复杂物体,如果能够精确地计算出它们的投影变换参数,就能够有效地将它们投影到二维坐标系中,从而得到准确的结果。
总的来说,投影的公式是一种重要的几何变换,它可以将三维空间的物体映射到二维坐标系中,是机器视觉系统的基础。
它的公式是一种非常复杂的变换,但掌握它就可以实现各种机器视觉应用,有助于准确识别物体。
摄影测量中的相机标定与投影变换方法摄影测量是一门重要的测绘学科,它通过使用摄影测量仪器,通过摄影测量原理,获取地球上对象的几何形状、位置和方位信息。
在摄影测量中,相机的标定和投影变换方法是非常关键的步骤。
相机的标定是指确定相机内外参数的过程。
相机内参数主要包括焦距、主点位置、畸变系数等信息,而相机外参数则包括相机在空间中的位置和姿态。
相机内参数的标定可以通过相机标定板进行,通过将标定板放置在不同位置和角度下拍摄,结合图像上的特征点,可以计算出相机内参数。
而相机外参数则可以通过在摄影测量过程中使用全球定位系统(GPS)或惯性导航系统(INS)等技术进行标定。
投影变换方法是将三维空间中的点投影到二维图像平面上的方法。
在摄影测量中,常用的投影变换方法有平行投影和透视投影两种。
平行投影是指相机和被摄对象之间的距离相对较远,从而忽略了物体到相机的距离,使得目标物体在二维图像上保持其几何形状和大小的投影方式。
而透视投影则是指相机和被摄对象之间的距离相对较近,使得目标物体在二维图像上的投影与其在三维空间中的形状和大小有所差异。
在摄影测量中,相机标定和投影变换方法的精度对于获取高质量的测绘数据是至关重要的。
相机标定的精度主要受到标定板的质量和精确度的影响,因此在标定过程中应注意选择合适的标定板和拍摄条件,并结合图像处理算法进行进一步的精细化处理。
同样,投影变换方法的精度也受到相机标定的影响,因此在使用投影变换方法进行测绘时,应首先进行相机的标定,然后再进行投影变换。
在实际应用中,相机标定和投影变换方法的精度可以通过误差分析和精度评定来进行评估。
误差分析主要通过对标定板的拍摄和图像处理过程进行实验,计算出各个参数的误差范围和误差概率,从而评估标定结果的可靠性。
而精度评定则是通过与已知真值对比进行,计算出测绘结果与真值之间的误差大小,从而评估摄影测量结果的精度。
总之,相机的标定和投影变换方法是摄影测量中非常重要的步骤。
3d编程基本原理
3D编程基本原理是指在计算机中实现三维图形渲染和动画效果的技术原理。
以下是一些常见的基本原理:
1. 三维坐标系统:在三维空间中,使用三个坐标轴(通常是x、y 和z轴)来确定物体的位置和方向。
2. 三角形绘制:三维图形通常使用三角形作为基本的图元进行绘制。
通过确定三角形的顶点位置和颜色来绘制复杂的三维图形。
3. 光照模型:光照模型用于模拟光照对物体的影响。
常见的光照模型包括环境光、漫反射光和镜面反射光等。
4. 投影变换:在将三维物体渲染到二维屏幕上时,需要进行投影变换。
常见的投影方式包括透视投影和正交投影。
5. 纹理映射:纹理映射用于将二维图像(纹理)贴到三维物体上,以增加细节和真实感。
6. 三维变换:通过平移、旋转和缩放等变换操作,可以改变物体在三维空间中的位置、方向和大小。
7. 可见性检测:在渲染三维场景时,需要确定哪些物体是可见的,哪些是被遮挡的。
常见的可见性检测算法包括深度缓冲和剔除算法等。
8. 动画效果:通过改变物体的属性(如位置、颜色等)来实现动画效果。
常见的动画技术包括关键帧动画、骨骼动画和物理模拟等。
以上是一些常见的基本原理,实际的3D编程还涉及到更多的细节和技术,如着色器编程、阴影算法、碰撞检测等。
图形变换基本概念图形变换是计算机图形学中的一个重要概念,它通过对图形进行特定操作来改变其形状、大小或位置。
图形变换常用于图像处理、动画制作和计算机图形学等领域,对于实现图像变换效果有着重要的作用。
本文将介绍几种常见的图形变换方法及其基本概念。
一、平移变换(Translation)平移变换是一种基本的图形变换方法,它将图形沿着指定的方向进行移动。
平移变换可以通过改变图形中所有点的坐标来实现。
设原始坐标为(x,y),平移变换后的坐标为(x',y'),则有如下公式:x' = x + dxy' = y + dy其中dx和dy分别是水平和垂直方向上的平移量。
通过改变dx和dy的值,可以实现图形的平移。
二、旋转变换(Rotation)旋转变换是将图形绕着指定点旋转一定角度的操作。
旋转变换可以通过改变图形中每个点的坐标来实现。
设原始坐标为(x,y),旋转变换后的坐标为(x',y'),则有如下公式:x' = x*cosθ - y*sinθy' = x*sinθ + y*cosθ其中θ表示旋转的角度。
通过改变θ的值,可以实现图形的旋转。
三、缩放变换(Scaling)缩放变换是将图形按比例进行放大或缩小的操作。
缩放变换可以通过改变图形中每个点的坐标来实现。
设原始坐标为(x,y),缩放变换后的坐标为(x',y'),则有如下公式:x' = x * sxy' = y * sy其中sx和sy分别表示在水平和垂直方向上的缩放比例。
通过改变sx和sy的值,可以实现图形的缩放。
四、错切变换(Shearing)错切变换是将图形在水平或垂直方向上斜向延伸的操作。
错切变换可以通过改变图形中每个点的坐标来实现。
设原始坐标为(x,y),错切变换后的坐标为(x',y'),则有如下公式:x' = x + myy' = nx + y其中n和m分别表示在水平和垂直方向上的错切系数。
第六章 三维图形变换第一节 三维图形变换基础一、三维坐标系xyzxyz右手坐标系左手坐标系三维图形学中习惯上通常是采用右手坐标系。
xy 平面对应于视平面,z 轴垂直于视平面,指向视平面之外。
二、三维齐次坐标及变换矩阵三维图形变换也是基于矩阵运算进行。
矩阵运算的维数被扩展为四维。
三维坐标点采用4元齐次坐标表示:(x , y , z , 1),三维坐标与三维齐次坐标的相互转换如下:三维坐标(x , y ,z )——齐次坐标(x , y ,z , 1) 齐次坐标(x , y ,z , h )——二维坐标(x /h , y /h ,z /h ) 变换矩阵则为4X4的矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡s nm kr j i h q f e d p c b a 其中:平移变换第二节 三维几何变换一、三维基本变换 1. 平移变换⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1010000100001nmk T )1,,,()1,,,(n z m y k x T z y x +++=⋅2. 比例变换)1,,,()1,,,(1000000000000jz ey ax T z y x j e a T =⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡= 3. 旋转变换三维的基本旋转变换分为三种,即绕三个坐标轴的旋转变换。
(1)绕z 轴旋转γ角旋转后z 值不变,x,y 值将发生改变,x,y 值的计算公式与平面旋转相同,即:zz y x y y x x ='+='-='γγγγcos sin sin cos 则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000010000cos sin 00sin cos γγγγT 有:)1,1,cos sin ,sin cos ()1,,,(γγγγy x y x z y x +-=T(2)绕x 轴旋转α角则旋转后x 的坐标值不变,y 和z 的坐标值将改变,相当于在yz 平面上绕平面原点进行旋转变换。
平面转转变换的公式为:ααααcos sin sin cos y x y y x x +='-='对应而来,这里y 对应于x ,z 对应y ,有:ααααcos sin sin cos z y z z y y +='-='则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=10000cos sin 00sin cos 00001ααααT )1,cos sin ,sin cos ,()1,,,(ααααz y z y x z y x +-=T(3)绕y 轴旋转β角这时,z 对应于x ,x 对应于y 。
名词解释:1.图形:能够在人们视觉系统中形成视觉印象的对象称为图形,包括自然景物和人工绘图。
2.像素图:点阵法列举图形中的所有点。
用点阵法描述的图形称为像素图。
3.参数图:参数法描述图形的形状参数和属性参数。
用参数法描述的图形称为参数图。
4.扫描线:在光栅扫描显示器中,电子枪扫过的一行称为一条扫描线。
5.构造实体几何表示法:用简单的实体(也称为体素)通过集合运算组合成所需的物体的方法称为构造实体几何表示法。
6.投影:投影是从高维〔物体〕空间到低维〔投影〕空间的一种映射。
7.参数向量方程:参数向量方程是包含参数和向量的方程。
8.自由曲线:形状比较复杂、不能用二次方程来表示的曲线称为自由曲线,通常以三次参数方程来表示9.曲线拟合:给定一个点列,用该点列来构造曲线的方法称为曲线拟合。
10.曲线插值:已知曲线上的一个点列,求曲线上的其他点的方法称为曲线插值。
11.区域填充:根据像素的属性值、边或顶点的简单描述,生成区域的过程称为区域填充。
12.扫描转换:在矢量图形中,多边形用顶点序列来表示,为了在光栅显示器或打印机等设备上显示多边形,必须把它转换为点阵表示。
这种转换称为扫描转换。
1、电脑图形学:用电脑建立、存储、处理某个对象的模型,并根据模型产生该对象图形输出的有关理论、方法与技术,称为电脑图形学。
2、电脑图形标准:电脑图形标准是指图形系统及其相关应用程序中各界面之间进行数据传送和通信的接口标准。
3、图形消隐:电脑为了反映真实的图形,把隐藏的部分从图中消除。
4、几何变换:几何变换的基本方法是把变换矩阵作为一个算子,作用到图形一系列顶点的位置矢量,从而得到这些顶点在几何变换后的新的顶点序列,连接新的顶点序列即可得到变换后的图形。
5、计算几何:计算几何研究几何模型和数据处理的学科,讨论几何形体的电脑表示、分析和综合,研究如何方便灵活、有效地建立几何形体的数学模型以及在电脑中更好地存贮和管理这些模型数据。
6、裁剪:识别图形在指定区域内和区域外的部分的过程称为裁剪算法,简称裁剪。
三维投影到二维的变换公式
在计算机图形学中,三维物体经常需要投影到二维平面上显示。
这个过程涉及到从三维空间到二维空间的变换。
下面是三维投影到二维的变换公式:
1. 正交投影
对于正交投影,变换公式如下:
x' = x
y' = y
z' = 0
其中x、y、z是三维物体的坐标,x'、y'、z'是投影后二维平面上的坐标。
2. 透视投影
对于透视投影,变换公式如下:
x' = x/z
y' = y/z
z' = z/d
其中d是观察者到投影平面的距离。
这个公式可以通过矩阵乘法表示:
[x' y' z' 1] = [x y z 1] * [1 0 0 0;
0 1 0 0;
0 0 1/d 0;
0 0 0 1]
这个矩阵被称为透视投影矩阵。
以上就是三维投影到二维的变换公式。
在实际应用中,可以根据需要选择正交投影或透视投影。