电机说明文档(1)
- 格式:docx
- 大小:1.80 MB
- 文档页数:13
YBJ系列绞车用隔爆型三相异步电动机产品使用说明书敬告顾客:1. 安装和使用电动机前,请仔细阅读产品使用说明书,以确保正确、安全使用。
2. 使用电动机时,必须将电动机电源引入装置及机座可靠接地,防止人身和设备发生安全事故。
3. 对隔爆型三相异步电动机电气和隔爆性能不熟悉的非专业人员,不得拆装修理电动机;隔爆零件不得随意更换,须采用符合规定要求的零件,否则不良后果由顾客自行负责。
4. 严禁电动机长时间过载。
江西西莫电机制造有限公司产品使用说明书1. 产品概述1.1 本系列产品执行《JB 8672 - 1997 YBJ 系列绞车用隔爆型三相异步电动机》及《MT451-1995 煤矿用隔爆型低压三相异步电动机安全性能通用技术规范》行业标准。
系供在有甲烷和煤尘爆炸性混合物的矿井中驱动调度绞车用,可在海拔不超过1000m ,环境空气温度为-20~40℃,相对湿度不大于95%(在温度为25℃时)的矿井中安全使用。
1.2 本系列电动机为矿用隔爆型自扇冷式,外壳防护等级为IP44(接线盒为IP54),冷却方式IC0141。
安装时,出线喇叭口可指向电动机的后端(非轴伸端)或左右两侧。
为了适应煤矿需要,电源引入装置有6个接线端子和1个接地线端子,可供380V/660V (660V/1140V )电源使用。
1.3型号的组成及其代表意义Y B J - □2. 隔爆结构2.1 本系列电动机隔爆外壳结构(隔爆结合面火焰通路长度、间隙、表面粗糙度,电气间隙、爬电距离等)均按《GB 3836.1-2010 (eqv IEC 60079-0:2007)、GB 3836.2-2010 (eqv IEC 60079-1:2007)、GB 3836.3-2010 (eqv IEC 60079-7:2006) 爆炸性环境》设计制造。
2.2 电动机隔爆零件包括:机座、轴、前(后)端盖、轴承内盖、接线盒座、接线盒盖、接线板、接线柱、风扇及橡胶密封圈等。
1LGO系列(IP55)三相异步电动机1LGO Series(IP55)three phase asynchronousmotor技术说明SPECIFICATION西门子电机(中国)有限公司Siemens Standard Motors Ltd.1 说明1.1 应用范围标准电机使用规范:标准电机具有IP55 防护等级(见铭牌标注),适用于灰尘及潮湿的工作环境。
如果电机安装或储存于户外,有必要增加相应的防护装置,以避免受长期强烈的阳光暴晒、雨水的侵蚀、以及冰雪和灰尘对电机造成的影响。
如果有必要,请咨询制造工厂或相关的技术部门。
电机适用于热带地区,参考标准:冷却环境温度40℃,相对湿度60%。
环境温度-20℃ (40)海拔高度≤1000m如果使用环境条件和以上不一样,电动机铭牌必须作相应的标示。
本系列电机符合GB18613-2006《中小型三相异步电动机能效限定值及能效等级》标准,能效等级为3级,具体规格的能耗指标参见铭牌。
1.2结构及运行模式电机结构型式:1LG0电机为自冷却(带风扇)型式电机。
在使用时必须确保电机具有足够的冷却风量,该要求可以通过独立驱动风扇或风机来达到,在安装风扇时必须确保风机的风向必须与电机正常冷却的风向一致。
标准电机底脚和机座是浇铸一体的。
.2 运输及储存1滚动轴承:当电机从入库一直到开始调试的时间超过4年,电机所装配的“滚动轴承”必须加以更换。
过长的储存时间将会对电机的使用寿命造成一定的影响。
加工表面(法兰表面,轴端表面等)必须做防腐蚀处理,如必要,对绝缘电阻进行测量,详见3.5。
3 调试3.1 安装电机安装完毕后必须将吊环拧紧或拆除。
电机轴朝下安装,建议在风罩端增加相应的防护措施以防止异物通过风扇罩进入。
电机轴朝上安装,一定要安装由设备运营商提供的防护盖,以防止液体顺轴进入电机。
低噪音运行:联轴器和联动件(联轴器,滑轮、风扇)的严格对齐和良好的平衡是电机低噪音低振动运行的必要条件。
![步进电机说明书[1]](https://uimg.taocdn.com/16299412fc4ffe473368ab4a.webp)
步 距 角————0.9º/1.8º步 距 角 精 度————±5.4% 轴 向 间 隙————0.1~0.3mm 径 向 跳 动————0.02mmMax绝 缘 电 阻————500V DC 100M Ω Min 绝 缘 强 度————500V AC 50Hz 1Ma Minute 环 境 温 度————-25℃~+55℃ 温 升————75K Max 绝 缘 等 级————B技术参数型号相数电压V电流A电阻Ω电感mH保持转矩N.M定位转矩Kg.cm转动惯量g.cm ²机身长mm39BYGH250A 2 6.5 0.4 6.8 6.5 0.05 0.05 1120 39BYGH250B 2 12 0.4 30 42 0.21 0.12 20 34 39BYGH250C 2 13.5 0.3 45 80 0.310.25 40 44外型尺寸 接线图运行矩频特性(平均参考值) 型号运行步距角运行矩频特性N.M/Hz (24VDC 测试) 驱动器 39BYGH250A 0.9º 0.05/600 0.02/100039BYGH250B 0.9º 0.2/600 0.16/1200 0.1/5000 39BYGH250C 0.9º0.28/600 0.18/12002HB353MAE步 距 角————0.9º/1.8º步 距 角 精 度————±5.4% 轴 向 间 隙————0.1~0.3mm 径 向 跳 动————0.02mmMax绝 缘 电 阻————500V DC 100M Ω Min 绝 缘 强 度————500V AC 50Hz 1Ma Minute 环 境 温 度————-25℃~+55℃ 温 升————75K Max 绝 缘 等 级————B技术参数型号相数电压V电流A电阻Ω电感mH保持转矩N.M定位转矩Kg.cm转动惯量g.cm ²机身长mm42BYH250 2 9.6 0.4 24 36 0.17 0.15 2025 42BYH250A 2 12 0.4 30 37 0.25 0.20 38 34 42BYH250B 2 8 0.8 10 17 0.32 0.22 57 40 42BYH250C 2 3.84 1.2 3.2 60.450.28 82 48外型尺寸 接线图注:轴为单扁丝,也可根据客户需要定做运行矩频特性(平均参考值) 型号运行步距角运行矩频特性N.M/Hz (24VDC 测试) 驱动器 42BYGH250 0.9º 0.16/100 0.15/200 0.12/500 0.08/1000 42BYGH250A 0.9º 0.2/300 0.12/500 0.10/100042BYGH250B 0.9º 0.29/300 0.27/1000 0.2/2000 0.15/3000 42BYGH250C 0.9º0.4/600 0.36/1000 0.36/2000 0.3/30002HB363MAE 2HB504MAE 2HB504MA57BYG 系列步 距 角————0.9º/1.8º步 距 角 精 度————±5.4% 轴 向 间 隙————0.1~0.3mm 径 向 跳 动————0.02mmMax绝 缘 电 阻————500V DC 100M Ω Min 绝 缘 强 度————500V AC 50Hz 1Ma Minute 环 境 温 度————-25℃~+55℃ 温 升————75K Max 绝 缘 等 级————B技术参数型号相数电压V电流A电阻Ω电感mH保持转矩N.M定位转矩 Kg.cm 转动惯量g.cm ² 重量kg 机身长mm 57BYG250A 4 2.3 1.5 1.5 1.3 0.29 0.333 60 0.45 41 57BYG250B 4 2.4 2.4 1 1.9 0.58 0.706 145 0.65 56 57BYG250C 4 5.4 1.5 3.6 6 0.880.982301.076外型尺寸 接线图注:轴为单扁丝,也可根据客户需要定做运行矩频特性(平均参考值) 型号运行步距角运行矩频特性N.M/Hz (24VDC 测试) 驱动器 57BYG250A 0.9º 0.25/400 0.2/1000 0.1/200057BYG250B 0.9º 0.38/400 0.35/1000 0.3/2000 0.25/3000 57BYG250C 0.9º0.8/400 0.71000 0.5/2000 0.3/30002HB363MAE 2HB504MAE 2HB504MA步距角————0.9º/1.8º步距角精度————±5.4%轴向间隙————0.1~0.3mm径向跳动————0.02mmMax绝缘电阻————500V DC 100MΩMin绝缘强度————500V AC 50Hz 1Ma Minute 环境温度————-25℃~+55℃温升————75K Max绝缘等级————B技术参数型号相数电压V电流A电阻Ω电感mH保持转矩N.M定位转矩Kg.cm转动惯量g.cm²机身长mm57BYGH250A 2 2.4 3 0.8 1.4 0.9 0.4 300 5657BYGH250B 2 4.5 2.0 2.258.5 1.5 0.4 300 78 57BYGH250C 2 3.2 2.8 1.13 4.4 1.7 0.68 400 78 外型尺寸接线图注:轴为单扁丝,也可根据客户需要定做运行矩频特性(平均参考值)型号运行步距角运行矩频特性N.M/Hz (40VDC测试) 驱动器57BYGH250A 0.9º0.6/400 0.55/1000 0.5/2000 0.4/300057BYGH250B 0.9º 1.3/400 1.2/1000 0.9/2000 0.5/300057BYGH250C 0.9º 1.5/400 1.3/1000 0.7/2000 0.5/30002HB363MAE2HB504MAE2HB504MA步 距 角————0.9º/1.8º步 距 角 精 度————±5.4% 轴 向 间 隙————0.1~0.3mm 径 向 跳 动————0.02mmMax绝 缘 电 阻————500V DC 100M Ω Min 绝 缘 强 度————500V AC 50Hz 1Ma Minute 环 境 温 度————-25℃~+55℃ 温 升————75K Max 绝 缘 等 级————B技术参数型号相数电流A电阻Ω保持转矩N.M定位转矩Kg.cm转动惯量g.cm ² 机身长(L) mm85BYGH250A 4 2 2.2 2.1 0.8 1000 65 85BYGH250B 4 4.5 0.62 4.1 1.2 1400 94 85BYGH250C 4 4.0 0.956.32.4 2700 118 85BYGH250D 4 6.2 0.75 12.23.64000 156外型尺寸 接线图运行矩频特性(平均参考值) 型号运行步距角运行矩频特性N.M/Hz (63VDC 测试) 驱动器85BYGH250A 0.9º 2/400 2.0/1000 1.6/2000 1.3/3000 0.9/4000 85BYGH250B 0.9º 3.5/400 3.2/1000 2.6/2000 2.4/3000 1.8/4000 85BYGH250C 0.9º 6/400 5.5/1000 4.2/2000 3.2/3000 2.3/4000 85BYGH250D 0.9º 9/400 8.5/1000 6.0/2000 4.0/3000 3/40002HB504MAE2HB504MA 2HB806MAE2HB808MA步 距 角————0.9º/1.8º步 距 角 精 度————±5% 轴 向 间 隙————0.1~0.3mm 径 向 跳 动————0.025mmMax绝 缘 电 阻————500V DC 100M Ω Min 绝 缘 强 度————950V AC 50Hz 1Ma Minute 环 境 温 度————-25℃~+55℃ 温 升————85K Max 绝 缘 等 级————B技术参数 型号相数电压V电流A电阻Ω电感mH 保持转矩N.M 定位转矩Kg.cm 转动惯量g.cm ² 重量kg 机身L (MM )86BYG250A-01 2/4 2.9 1.7 1.7 6 1.6 0.8 6401.6 86BYG250A-02 2/4 51.25 4161.6 0.8 640 1.6 86BYG250A-03 2/4 1.6 3.6 0.232.5 1.6 0.8 640 1.6 86BYG250A-04 2/4 1.4 4.5 0.31 1.3 1.6 0.8 640 1.6 6586BYG250B-01 2/4 340.65 6.93.2 2.4 1300 2.6 86BYG250B-02 2/4 2.54.6 0.55 2.5 3.2 2.4 1300 2.6 86BYG250B-03 2/4 4.3 2.5 1.7 9 3.2 2.4 1300 2.6 86BYG250B-04 2/45.4 2 2.7 15 3.2 2.4 1300 2.6 97 86BYG250C-01 2/4 2 7 0.29 24.8 3.6 1900 3.8 86BYG250C-02 2/4 4417.44.83.619003.8129 外型尺寸 接线图运行矩频特性(平均参考值)型号运行步距角运行矩频特性N.M/Hz (30VDC 测试) 驱动器86BYG250A 0.9º 1.5/400 1.2/1000 1.0/2000 0.6/3000 86BYG250B 0.9º 3.0/400 2.8/1000 2.2/2000 1.7/3000 86BYG250C 0.9º4.8/400 4.1/1000 3.9/2000 3.2/30002HB504MAE 2HB504MA 2HB806MAE 2HB808MA步 距 角————0.9º/1.8º步 距 角 精 度————±5% 轴 向 间 隙————0.1~0.3mm 径 向 跳 动————0.025mmMax绝 缘 电 阻————500V DC 100M Ω Min 绝 缘 强 度————950V AC 50Hz 1Ma Minute 环 境 温 度————-25℃~+55℃ 温 升————85K Max 绝 缘 等 级————B技术参数 型号相数电压V电流A空载起动频率Hz空载运行频率KHz保持转矩N.M定位转矩Kg.cm转动惯量g.cm ²机身长L mm重量kg90BYG250A 2/4 50 4 700 10 2.1 0.8 120069 2.2 90BYG250B 2/4 100 4 700 10 4.2 0.8 2400 98 3.6 90BYG250C 2/4 100 4 700 10 6.3 0.8 3600 128 4.8外型尺寸 接线图运行矩频特性(平均参考值) 型号运行步距角 运行矩频特性N.m/KHz (63VDC 测试)驱动器 90BYG250A 0.9º 2.2/1 2.2/2 2/4 1.5/6 1.2/8 1/10 90BYG250B 0.9º 4.5/1 4.5/2 3.1/4 2.0/6 1.4/8 0.6/10 90BYG250C 0.9º6/1 5.6/2 4.5/4 3.2/6 2/8 1/102HB1108MAE 2HB806MAE 2HB808MA步距角————0.9º/1.8º步距角精度————±5%轴向间隙————0.1~0.3mm径向跳动————0.025mmMax绝缘电阻————500V DC 100MΩMin绝缘强度————950V AC 50Hz 1Ma Minute 环境温度————-25℃~+55℃温升————85K Max绝缘等级————B技术参数型号相数电压V 电流A电阻Ω电感MH保持转矩N.M定位转矩Kg.cm转动惯量kg.cm²重量kg机身长mm 110BYG250 2/4 80~325 6 0.68 10 8 2 5 4.5 121 110BYG250A 2/4 80~325 6 0.72 13 12.5 5 8.4 9.5 175 110BYG250B 2/4 80~325 6 0.8 12 18 7 12.6 12 220 110BYG250C 2/480~325 6 0.9 20 22 8 16.8 13.5250接线图外型尺寸运行矩频特性(平均参考值)型号运行步距角运行矩频特性N.m/KHz (110V AC测试) 驱动器110BYG250 0.9º8/1 7.1/2 6.5/4 5.6/6 4.5/8 3.5/10110BYG250A 0.9º12.5/1 12/2 9/4 7.5/6 6/8 5/10110BYG250B 0.9º16/1 15/2 13/4 11/6 8/8 6.5/10110BYG250C 0.9º18/1 16/2 14/4 12/6 10/8 8/102HB1108MAE2HB806MAE2HB808MA步距角————0.9º/1.8º步距角精度————±5%轴向间隙————0.1~0.3mm径向跳动————0.025mmMax绝缘电阻————500V DC 100MΩMin绝缘强度————1000V AC 50Hz 1Ma Minute 环境温度————-25℃~+55℃温升————85K Max绝缘等级————B技术参数型号相数电压V 电流A电阻Ω电感MH保持转矩N.M定位转矩Kg.cm转动惯量kg.cm²重量kg机身长MM 130BYG250 2/480~3256 0.75 14 22 10 30 11 197 130BYG250A 2/480~325 6 0.77 14 27 10 35 13 225 130BYG250B 2/480~325 7 0.64 11 37 12 45.5 16280 接线图运行矩频特性(平均参考值)型号运行步距角运行矩频特性N.m/KHz (110V AC测试) 驱动器130BYG250A 0.9º22/1 20/2 15/4 13/5 11/6130BYG250B 0.9º25/1 22/2 16/4 14/5 10/6130BYG250C 0.9º35/1 29/2 18/4 15/5 13/62HB1108MAE。
ISMG1系列通用伺服电动机用户手册Ver0.0 苏州默纳克控制技术有限公司前言感谢您使用默纳克公司ISMG1系列通用交流伺服电机。
该系列交流伺服电机是一种快速响应、精确定位的交流伺服电机。
该产品需要配合伺服驱动器一起组成一套驱动系统,可用于各种需要精确定位、精密控制的场合。
在使用该系列电机之前,请您仔细阅读本使用说明书各项内容,以保证该电机的正确安装、连接、使用和维护。
注意事项♦本使用说明书中的图例仅为了说明,可能会与您订购的产品有所不同。
♦由于产品升级或规格变更,以及为了提高说明书的便利性和准确性,本说明书的内容会及时进行变更。
♦由于损坏或遗失而需要订购使用说明书时,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
♦如果您使用中仍有一些使用问题不明,请与本公司客户服务中心联系。
♦客服电话:400-777-12601 安全及注意事项a 、使用前用500V 兆欧表检查电机U 、V 、W 对电机外壳的绝缘电阻,应该不低于5M Ω。
b 、使用时应有良好的接地。
c 、电机转动时请不要用手触摸电机的轴伸。
d 、不要撞击电机,以免造成反馈元器件损坏。
e 、装机前电机须空载与伺服驱动器联调正常。
2 型号命名规则ISM系列伺服电机G1A 100VB 200V U A BCDE ×1×10×100×1000×10000功率两位功率数和一位字母组成50A 75B 15C50W 750W 1500WX 标准两位转速数和一位字母组成一位字母和一位数字组成U1C 300V D400V1光轴2实心带键3轴连接方式一位字母和一位数字组成5制动器、减速器、油封一位字母和一位数字组成0没有1油封2制动器3减速器4油封+制动器5油封+减速器6制动器+减速器A B C D E 50B 30C 10DAR17F风扇冷却图2-1 命名规则3 主要性能指标3.1 产品使用环境海拔高度:1000米以下环境温度:0℃~40℃相对湿度:20-80%(不得结露)IP等级:全封闭自冷却IP65、风冷IP54(轴贯通部分除外)电机需要安装在通风良好、且不能够太阳直晒的室内环境。
4. 检查及维护4.1 引言——为了保证连续安全可靠使用,必须制定维护大纲。
4.2 电动机在运行时的常规检查上海电机厂建议要经常检查润滑油系统。
应检查所有油位表中的油位。
通过油环视察窗查看油环的旋转情况。
如果发现漏油,应追查根源并加以纠正。
监视润滑油的变色及污染情况。
注意任何噪声或振动的突然增大或过大,并应迅速纠正。
在连续运行期间定期检查轴承温度,检查定、转子之间的间隙,清理集电环和刷架上的积灰和油污,至少每星期一次。
4.3维护计划4.3.1 对于一般的使用条件,推荐以下维修计划。
4.3.1.1 在提供的测温装置处测量温度,它们时为了测量定子绕组、冷却空气及轴承的温度。
(例如埋入式电阻测温元件)。
4.3.1.2 查听整个电动机是否有不正常的机械噪声或者出现变化的响声(例如摩擦或敲击声等)。
4.3.1.3 当具有水——空气交换器装置时,用目检查水管是否漏水。
4.3.1.4 当采用过滤器装置时,检查过滤器的沾污程度。
4.3.1.5 用手检查或用温度计(如果装有)在测温装置处测量并记录轴承温度。
检查定、转子之间的间隙,清理集电环和刷架上的积灰和油污。
4.3.2 每月的检查。
4.3.2.1 用轻便型测量设备测量振动。
测量点位置在轴承室中部。
4.3.2.2 检查所有电缆,联接线及其紧固情况。
4.3.2.3 如果是线绕式转子,检查在滑环、导电螺杆及电刷装置上灰尘沉积的程度。
需要时清除沉积的灰尘。
检查电刷的摩损及在刷握中自由活动的情况。
如果需要,则更换电刷。
4.3.2.4 当具有过滤器装置时,在过滤监视器动作后(例如压差开关)则应更换或清理过滤器。
4.3.2.5 在油润滑的轴承中,检查油环运转是否平稳以及带油情况。
检查轴承密封是否漏油,如果已弄脏,则清除脏物。
检查供油设备。
4.3.3 每季的检查。
4.3.3.1 测量定、转子绕组的绝缘电阻。
4.3.3.2 用一只额定电压为500至625伏的兆欧计测量绝缘的轴承或座与钢的基础之间的绝缘电阻。
C500 型工业快速门控制系统使用说明书一,主回路配线1、控制端子接线:2、单相220V动力端子配线220V电源通过断路器到电路板上的L N,PE--接地线,P+/PB--电阻线,U /V /W--电机线,B1 B2输出220V,经过整流块接入刹车。
3.电机接线图:三、限位调试及参数设置相关要求:1)限位学习过程:长按1号键(LEARN)5秒,显示L0,再按2号键(ENTER),进入门帘上限位学习同时LED屏上显示当前门帘所在位置编码器反馈的数值,然后长按3号键(UP)来调整门的上限位(注:门是往上走),调整完成后按2号键(ENTER)确认保存上限位位置,同时显示屏显示L1进入下限位学习,按2号键(ENTER)显示编码器反馈的数值,然后按4号键(DOWN)调整门的下限位,调整完成后按2号键(ENTER)确认保存下限位位置同时显示L1,限位学习结束,按1号键(LEARN)直接返回运行状态显示0。
2),参数设置:参数号参数名称范围默认值说明P1—00 门类选择0-1 0 0 -快速门;1-滑升门P1—01 正转频率0—100.00 50.00P1---02 反转频率0— 100.00 30.00P1---03 上缓冲距离50---9999 1000P1—04 加速时间1---100 30P1---05 减速时间1---100 4P1—06 下降延时0—200 10P1—07 输出功能选择0---4 0 LockOut输出端口功能选择0:互锁输出;1:关到位;3)在监控画面下,按DOWN键6秒以上,LED显示00000,输入正确密码,进入P0参数组;P0—00 修改密码P0—01 允许运行时间设置(天)P0---02 查看总运行时间(小时)P0—03 查看运行次数P0—04 查看运行次数次数=P0.04x10000+ P0.034)手自动变换方式由P0-08决定。
P0-08为0时,在监控画面下,同时按ENTER和DOWN 键,实现手动、自动切换;P0-08为1时,手自动端闭合时为手动,断开是为自动。
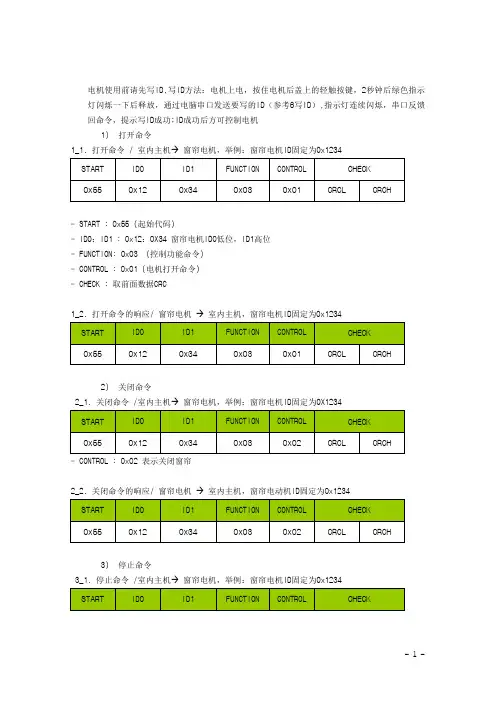
电机使用前请先写ID,写ID方法:电机上电,按住电机后盖上的轻触按键,2秒钟后绿色指示灯闪烁一下后释放,通过电脑串口发送要写的ID(参考6写ID),指示灯连续闪烁,串口反馈回命令,提示写ID成功;ID成功后方可控制电机1)打开命令1_1. 打开命令 / 室内主机→窗帘电机,举例:窗帘电机ID固定为0x1234- START : 0x55 (起始代码)- ID0:ID1 : 0x12:0X34 窗帘电机ID0低位,ID1高位- FUNCTION: 0x03 (控制功能命令)- CONTROL : 0x01 (电机打开命令)- CHECK : 取前面数据CRC1_2. 打开命令的响应/ 窗帘电机→室内主机,窗帘电机ID固定为0x12342)关闭命令2_1. 关闭命令 /室内主机→窗帘电机,举例:窗帘电机ID固定为0X1234- CONTROL : 0x02 表示关闭窗帘2_2. 关闭命令的响应/ 窗帘电机→室内主机,窗帘电动机ID固定为0x12343)停止命令3_1. 停止命令 /室内主机→窗帘电机,举例:窗帘电机ID固定为0x1234- CONTROL: 0x3停止3_2. 停止命令的响应/ 窗帘电机→室内主机,窗帘电机ID固定为0x12344)百分比控制4_1. 百分比控制(邀请)/室内主机→窗帘电机,举例:窗帘电机ID固定为0x1234-CONTROL: 0X04 电机百分比运行控制-DATA: 0X00—0X64 电机百分比0%-100%4_2. 百分比响应/窗帘电机→室内主机,窗帘电机ID固定为0x1234-DATA:0XFF 设置行程百分比超过100%(0X64)返回给主机0XFF 表示错误信息电机未设置好行程的时,主机发百分比控制命令,从机返回的DATA为0XFF,表示错误信息5)读当前行程百分比5_1. 读百分比(邀请)/室内主机→窗帘电机,举例:窗帘电机ID固定为0x1234- START : 0x55 (起始代码)- ID0:ID1 : 0x12:0X34 窗帘电机ID0低位,ID1高位- FUNCTION: 0x01 (读命令)- DATA_ADDR : 0x02 (数据地址固定)- DATA_LENTH: 0X01 (数据长度)- CHECK : 取前面数据CRC5_2. 读百分比响应/窗帘电机→室内主机,窗帘电机ID固定为0x1234- START : 0x55 (起始代码)- ID0:ID1 : 0x12:0X34 窗帘电机ID0低位,ID1高位- FUNCTION: 0x01 (读命令)- DATA_LENTH: 0X01 (数据长度)- DATA : 0x02 (当前行程) 00 (关闭) 64 (打开)- CHECK : 取前面数据CRC6)写ID6_1. 写ID(邀请)/室内主机→窗帘电机,举例:写入窗帘电机ID为0x1234-START:0X55 起始码-ADDR0:ADDR1: 0x00:0X00 固定-FUNCTION: 0X02 写功能-DATA_ADDR: 0X00 (固定) 数据地址-DATA_LENTH: 0X02 数据长度-ID0-ID1: 写入的ID地址6_2. 写ID响应/窗帘电机→室内主机7)写方向7_1. 写方向(邀请)/室内主机→窗帘电机,举例:写入窗帘电机方向00-START:0X55 起始码-ID0:ID1: 0x12:0X34 窗帘ID-FUNCTION: 0X02 写功能-DATA_ADDR: 0X03 (固定) 数据地址-DATA_LENTH: 0X01 数据长度-DATA: 0/1 方向数据0或者17_2. 写方向(响应)/窗帘电机→室内主机,--DATA:00 电机正向 01 电机反向其它数据返回0XFF8)写手拉8_1. 写手拉(邀请)/室内主机→窗帘电机,举例:写入窗帘电机手拉开启00-START:0X55 起始码-ID0:ID1: 0x12:0X34 窗帘ID-FUNCTION: 0X02 写功能-DATA_ADDR: 0X04 (固定) 数据地址-DATA_LENTH: 0X01 数据长度-DATA: 0/1 手拉数据0或者18_2. 写手拉(响应)/窗帘电机→室内主机,--DATA:00 手拉开启 01 手拉关闭其它数据返回0XFF注:采用C RC-16/MODBUS x16+x15+x2+1进行校验 (从起始码到命令值的CRC) Width:16poly:0x8005init:0xffff。
![步进电机控制器--说明书[1]](https://uimg.taocdn.com/19440717cf84b9d528ea7abc.webp)
步进电机,伺服电机可编程控制器KH-01使用说明一、系统特点●控制轴数:单轴;●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);●最高输出频率:40KHz(特别适合控制细分驱动器);●输出频率分辨率:1Hz;●编程条数:99条;●输入点:6个(光电隔离);●输出点:3个(光电隔离);●一次连续位移范围:—7999999~7999999;●工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态;●升降速曲线:2条(最优化);●显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示;●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止;●手动运行功能:可调整位置(手动的点动速度和点动步数可设定);●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度;●程序编辑功能:可任意插入、删除可修改程序。
具有跳转行号、数据判零、语句条数超长和超短的判断功能;●回零点功能:可双向自动回到零点;●编程指令:共14条指令;●外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作;●电源:AC220V(电源误差不大于±15%)。
一、前面板图前面板图包括:1、八位数码管显示2、六路输入状态指示灯3、三路输出状态指示灯4、 CP脉冲信号指示灯5、 CW方向电平指示灯6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:脉冲————步进脉冲信号方向————电机转向电平信号+5V————前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
直流⽆刷电机驱动器说明书(1)BLDC⽆刷电机驱动器(UB510)使⽤⼿册w w w.u p u ru.c o m感谢您使⽤本产品,本使⽤操作⼿册提供UB510驱动器的配置、调试、控制相关信息。
内容包括。
l驱动器和电机的安装与检查l试转操作步骤l驱动器控制功能介绍及调整⽅法l检测与保养l异常排除本使⽤操作⼿册适合下列使⽤者参考l安装或配线⼈员l试转调机⼈员l维护或检查⼈员在使⽤之前,请您仔细详读本⼿册以确保使⽤上的正确。
此外,请将它妥善放置在安全的地点以便随时查阅。
下列在您尚未读完本⼿册时,请务必遵守事项: l安装的环境必须没有⽔⽓,腐蚀性⽓体及可燃性⽓体l接线时禁⽌将电源接⾄电机 U、V、W 的接头,⼀旦接错时将损坏驱动器 l在通电时,请勿拆解驱动器、电机或更改配线l在通电运作前,请确定紧急停机装置是否随时启动l在通电运作时,请勿接触散热⽚,以免烫伤警告:驱动器⽤于通⽤⼯业设备。
要注意下列事项:(1).为了确保正确操作,在安装、接线和操作之前必须通读操作说明书。
(2).勿改造产品。
(3).当在下列情况下使⽤本产品时,应该采取有关操作、维护和管理的相关措施。
在这种情况下,请与我们联系。
①⽤于与⽣命相关的医疗器械。
②⽤于可能造成⼈⾝安全的设备,例如:⽕车或升降机。
③⽤于可能造成社会影响的计算机系统④⽤于有关对⼈⾝安全或对公共设施有影响的其他设备。
(4).对⽤于易受震动的环境,例如:交通⼯具上操作,请咨询我们。
(5).如未按上述要求操作,造成直接或间接损失,我司将不承担相关责任。
1概述本公司研发⽣产的BLDC驱动器是⼀款⾼性能,多功能,低成本的带霍尔传感器直流⽆刷驱动器。
全数字式设计使其拥有灵活多样的输⼊控制⽅式,极⾼的调速⽐,低噪声,完善的软硬件保护功能,驱动器可通过串⼝通信接⼝与计算机相连,实现PID参数调整,保护参数,电机参数,加减速时间等参数的设置,还可进⾏IO输⼊状态,模拟量输⼊,告警状态及母线电压的监视。
CXT-8A煤矿防爆特殊型蓄电池式电机车使用说明书抚顺北龙电力机车有限责任公司1 概述1.1 应用范围CXT-8A煤矿用防爆特殊型蓄电池电机车(矮车体、斩波调速),适用于有沼气矿井的主要回风巷道和采区进、回风巷道或煤(岩)与沼气突出矿井(全风压通风)的主要运输巷道或回风巷道中,做为集结车辆、运输煤、矸石、材料、设备、人员之用。
该车具有重心低,后了望好的特点。
1.2 型号CXT-8A的含义C X T -8 A粘着质量8t A型防爆特殊型蓄电池式电机车1.3 使用环境A、海拔不超过1200米;B、环境温度最高为+40℃,最低为-20℃C、最湿月,月平均最大相对湿度为95%(同月,月平均最低温度不大于+25℃);D、在空气中无足以腐蚀金属和破坏绝缘的气体及导电尘埃。
2技术特征2.1CXT-8A型电机车综合技术特征见表1.表1表22.3 CXT-8A型电机车的外形结构见图12.4 CXT-8A型电机车牵引特性曲线见图23. 结构说明3.1 防爆特殊型电源装置部分CXT-8A型电机车采用了本厂设计的DXT——140防爆特殊型电源箱为本机车提供直流电源。
整个电源装置结构采用了一系列特殊的技术措施,使蓄电池在放电过程中产生的氢气不能积聚,不产生火花,因此可用于有煤尘、沼气爆炸的井下使用。
3.2机械部分CXT—8A型电机车机械部分由车体框架、司机室、走行部件、制动装置、撒砂装置等部分组成。
3.2.1 车体框架:车体框架是由左右侧板、前后端板、中间隔板焊接成一体的框型结构。
车架的前后端板上装有弹性缓冲器和连接器(即碰头)用以减轻连挂矿车时冲击。
司机室内设隔爆型司控器、制动手轮、撒砂扳手、脚踏警铃、司机座椅、前后照明灯、蓄电池电压容量显示器。
3.2.2走行部件:走行部件由轮对、齿轮变速机构、轴承箱、牵引电动机、弹性吊挂等组成,每台机车有两组走行部件。
减速机构为二级齿轮减速(见图齿轮传动系统示意图3)。
螺旋圆锥齿轮:m =7 Z1=14 Z2=45圆柱齿轮:m =7 Z3=13 Z4=57第一级速比:i1= 45/14 = 3.21第二级速比:i2= 57/13 = 4.38总速比:i= i1i2 =14.07减速箱内齿轮均采用润滑油润滑,日常运行中,保持润滑油量浸没大正齿轮靠近减速箱体底部处的全齿高。
试行本FANUCαi/βi 简明电机规格说明书第一版BEIJING-FANUC技术部2008年1月目录1. αi伺服电机规格说明 (5)1.1 αiS伺服电机安装尺寸与功率曲线说明·α2iS、α4iS电机安装尺寸说明·α8iS、α12iS电机安装尺寸说明·αi22S、α30iS、α40iS电机安装尺寸说明·αiS系列电机扭矩曲线说明1.2 αiF伺服电机安装尺寸与功率曲线说明·α4iF、α8iF电机安装尺寸说明·α12iF、α22iF、α30iF、α40iF电机安装尺寸说明·αiF系列电机扭矩曲线说明2. βi伺服电机规格说明 (21)2.1 βiS伺服电机安装尺寸与功率曲线说明·β2iS、β4iS电机安装尺寸说明·β8iS、β12iS电机安装尺寸说明·β22iS电机安装尺寸说明·βiS系列电机扭矩曲线说明3. αi主轴电机规格说明 (31)3.1 αiI主轴电机安装尺寸与功率曲线说明·αiI 3/10000 主轴电机安装尺寸说明·αiI6/10000 主轴电机安装尺寸说明·αiI8/8000 主轴电机安装尺寸说明·αiI12/7000 主轴电机安装尺寸说明·αiI15/7000 主轴电机安装尺寸说明·αiI12/7000 主轴电机安装尺寸说明·αiI18/7000 主轴电机安装尺寸说明·αiI22/7000 主轴电机安装尺寸说明·αiI30/6000 主轴电机安装尺寸说明·αiI40/6000 主轴电机安装尺寸说明·αiI 系列主轴电机功率曲线说明3.2 αiP主轴电机安装尺寸与功率曲线说明·αiP12/6000 主轴电机安装尺寸说明·αiP15/6000 主轴电机安装尺寸说明·αiP18/6000 主轴电机安装尺寸说明·αiP30/6000 主轴电机安装尺寸说明·αiP40/6000 主轴电机安装尺寸说明·αiP系列主轴电机功率曲线说明4. βi主轴电机规格说明 (54)4.1βi主轴电机安装尺寸与功率曲线说明·βiI3/10000 主轴电机安装尺寸说明·βiI6/10000 主轴电机安装尺寸说明·βiI8/8000 主轴电机安装尺寸说明·βiI12/7000 主轴电机安装尺寸说明·βiI系列主轴电机功率曲线说明5. 放大器配置说明 (60)前言FANUC电机可分为“伺服电机”和“主轴电机”两大类。
永磁同步电机调试、标定说明(VER:)设备需求:硬件:1、电脑一台(需有串口);2、串口数据线;软件:1、程序烧录软件:“”;2、串口监控软件:“”;标定台架典型控制模式:标定台架的典型系统连接方案如下图所示:上图中,负载电机可以是测功机或是对拖电机(注:负载电机峰值扭矩、峰值功率、最高转速等需大于待测驱动电机),负载电机使用转速控制模式,标定过程中由其控制需要的转速;被测驱动电机使用转矩控制模式,标定过程中控制实际转矩输出。
电机标定流程:各步骤操作详细说明:1、待标定电机信息收集:需要收集的电机信息详见如下表格,需完整填写表格中所有内容。
电机参数需求表.xlsx2、高压上电前确认:电机控制器:1、电机控制器母线正负接线正确;电机控制器与电机三相相序应控制器UVW与电机UVW一一对应;控制器外壳与电机外壳接地良好。
2、确认电机旋变变比与控制板匹配,控制器端旋变定义与电机端旋变定义一一对应。
3、控制器标称电流设置DF-10与驱动板拨码对应;4、若只上低压控制电,操作面板故障指示灯闪烁,说明当前存在故障,需根据故障码排除对应故障。
电机:1、确认电机温度电阻类型并设置功能码BA-00(温度电阻类型选择:1 PT100,2 PT1000 )及BA-01(电机过温保护点);若电机温度电阻未接入到电机控制器,可将BA-00设置为0屏蔽电机过温保护。
2、电机反电动势测试,以评估电机状态。
若电机反电动势谐波较大,正弦度较差,后续加载测试时可能容易出现控制异常。
3、电机调试:电机控制参数辨识:1、按照确认的电机参数设置功能码B1-00至B1-05及C4-12。
2、控制器上高压电,确认面板显示电压与实际电压一致;(B6-26=1,手动上电)3、确认电机可以自由转动,设置功能码B1-27 为12,按RUN键运行后即开始参数辨识,参数辨识后阶段电机会转动起来,辨识完成后自动停止。
4、辨识完成后检查C4-00、C4-01、C4-04、C4-10、C4-11等功能码的值,一般C4-00应小于C4-01;辨识3至4次,检查每次辨识完成后这些功能码的值是否有较大偏差,正常来说,每次辨识完成后这些参数应该基本一致;5、空载试转,调谐完成后空载状态下,设置一较小目标频率,电机应能正常转动,且输出电流正常一般应在10A以下。
目录电机说明文档 (2)1.直流伺服电机 (2)1.1直流伺服电机的结构与原理 (2)1.2实验室的直流伺服电机 (2)1.3直流伺服驱动器 (3)2.交流伺服电机 (5)2.1交流伺服电机原理 (6)2.2实验室交流伺服电机的使用 (6)2.3交流伺服驱动器的使用 (6)3.步进电机 (9)3.1工作原理 (9)3.2实验室步进电机 (9)3.3 步进电机驱动器 (10)4.直流无刷电机 (11)4.1直流无刷电机原理 (11)4.2 实验室直流无刷电机 (11)4.3 直流无刷驱动器 (12)电机说明文档《现代机电控制》实验在电机部分,选取了目前最为常用的电机:直流伺服电机,交流伺服电机,步进电机和直流无刷电机。
下面就每种电机原理、结构、物理连接、工作方式进行说明,旨在知道学生快速掌握电机的基本知识。
1.直流伺服电机1.1直流伺服电机的结构与原理直流伺服电机特指直流有刷电机,由磁极(定子),电枢(转子),电刷和换向器等三大部分组成,如图1.1所示:图1.1 直流伺服电机结构原理基本原理是线圈通电在磁场中产生安培力,带动线圈切割磁力线,当加在线圈的电压,反电动势和电阻分压达到平衡时,线圈转速保持不变。
对于他励直流伺服电机,通电时,有以下方程:电磁转矩:感应电动势与转速:电枢回路电压方程:(式1.1):电磁转矩:常数,与电机结构有关:线圈中电流:感应电动势:常数,与电机结构有关:转速:磁通量通过式1.1,建立直流电机转速关系为:(式1.2) 1.2实验室的直流伺服电机实验室使用到的直流伺服电机为maxon DC 直流伺服电机,如图1.2所示。
图1.2 Maxon DC motor该电机有两根电源线(红接24V,黑接地),编码器为常用的10pin编码器,如图1.3所示。
图1.3 编码器引脚说明(从左到右,编号为1~10)1:NC 2:Vcc 3:GND 4:NC 5:channel6:channel A 7:channel 8:channel B 9:channel I 10:channel I在使用时,我们只需要将2,3,6,8接到驱动器的V,GND,A,B端口即可使用1.3直流伺服驱动器实验室使用的直流伺服驱动器为铭朗直流伺服驱动器MLDS3610B系列,如图1.4所示。
1.3.1接线说明MOT+,MOT-分别连接电机的正负极,将电机编码器的A,B,Vcc,GND分别接到驱动器的A+,B+,=5V,GND上。
在控制上,若采用CAN总线控制,将控制器的CAN_H,CAN_L连到驱动器对应的CAN总线上;若采用RS232通信,将控制器的TX,RX接到驱动器对应的串口上即可。
1.3.2驱动器通信协议在与驱动器通信时,设置波特率为9600bps,CAN通信频率500bps。
常用的控制模式有位置控制模式和速度控制模式。
如果控制器为电脑或单片机,建议采用数字控制指令,通过RS232或CAN下发数字指令。
若控制器为PLC,建议通过差分模拟信号控制速度,CLK脉冲信号控制位置,下面分别介绍速度模式和位置模式控制指令。
1)位置控制模式数字指令控制:(1)位置控制模式首先要设置位置零点,一般以当前位置作为位置零点。
发送”PO0”设置当前位置为位置零点。
(2)设置最大运行速度,通过下发指令”SSP+速度参数”设置最大运行速度。
(3)设置最大加速度,通过下发指令”A+加速度参数”设置最大加速度。
(4)以绝对位置参量设置目标位置,通过下发指令”M+参数”设置绝对位置。
如:M2000,从当前位置运动到绝对位置2000;M-2000,运动到绝对位置-2000。
(5)以相对位置参量设置目标位置, 通过下发指令”MR +参数”,从当前位置相对运动。
如: MR2000,从当前位置正向运动 2000 个单位; MR-2000,从当前位置负向运动 2000个单位。
CLK脉冲模式控制速度:脉冲输入频率范围: 0-200KHz(1)相关指令:∙ 设置最大速度: SSP +参数∙ 设置最大跟踪误差: SER +参数∙ 设置最大加速度: A +参数∙ 设置步宽: STW +参数∙ 读取步宽值: GSTW(2)工作原理脉冲输入端每接收一个脉冲,电机运转一个步宽;位置与及转速的计算公式如下:位置(圈数)=脉冲个数 X 步宽(STW)÷ 编码器分辨率(4 倍线数)转速( RPM)=脉冲频率 x 步宽(STW)x 60 ÷ 编码器分辨率(4 倍线数)(3)通过 DIR 信号控制方向(注:如果采用串口通信,驱动器串口采用232电平,而单片机串口采用TTL 电平,所以在单片机串口和驱动器串口之间要连接一个TTL-RS232电平转换芯片)2)速度模式指令数字指令控制:通过下发指令”V+速度”控制电机以指定速度旋转。
差分模拟信号速度控制指令:(1)AIN+, AIN-输入电压范围: -10V~+10V;输入电压 VIN = (AIN+) –(AIN-);(2)相关指令: SSP(最大速度), SMAV(死区电压), SL, SR∙ 最大速度: SSP +参数例如, SSP5000。
电机允许速度范围: -5000~5000 RPM。
∙ 死区电压: SMAV +参数例如: SMAV200。
当输入信号电压范围在–200mV 到 200mV 时,电机速度为零;模拟电压控制速度的特性曲线如图1.4所示。
图1.4 差分模拟信号速度控制特性注:如果死区电压值设置过低,在该端口悬空时,驱动器可能会控制电机以一个很低的速度旋转。
电机转速和输入电压的关系:V = SSP ×VIN÷10V。
转向:SL、SR通过两条指令可以设置电机运转方向。
当设置SR 时,输入正电压时,电机正转;设置SL 时,输入正电压时,电机反转;此指令仅在模拟信号输入控制时有效,其余模式无效特别提示:此功能可以方便用户在只提供0~+10V 的电压下,实现电机的双向运转。
(3)PWM波控制利用PWM波控制直流有刷电机的速度,单片机和驱动器需要连接以下信号线:OPT+:连接单片机3.3V电源OPT-:连接单片机GNDPWM:连接单片机的PWM输出口。
首先设置PWM波的频率在100-500Hz。
通过设置PWM比较寄存器的值,改变占空比。
当占空比为50%时,电机停止;占空比<50%时,输出反向电流;占空比>50%时,输出正向电流。
以STM32F1的TIM3为例(TIM3的APB总线时钟频率32MHz),初始化时设置TIM3_CH2_PWM_Init(999,144-1); //频率为36MHz/(1000*144)=250Hz。
此时预装载值为1000,那么设置比较寄存器为500时,占空比50%。
TIM_SetCompare2(TIM3,500);(注:编程详细情况查看PWM的相关设置)2.交流伺服电机2.1交流伺服电机原理交流伺服电机内部的转子是永磁铁,驱动器控制的A/B/C 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度。
其内部线路图如图2.1所示:图2.1 交流电机内部电路图通过对AX,BY,CZ三相轮流通电,会形成正交旋转磁场,带动转子跟随转动,具体原理参考《机电传动与控制》。
交流伺服电动机运行平稳、噪音小。
但控制特性是非线性,并且由于转子电阻大,损耗大,效率低,因此与同容量直流伺服电动机相比,体积大、重量重。
2.2实验室交流伺服电机的使用实验室购买的交流伺服电机为森创交流伺服电机60CB系列,如图2.2所示:图2.2 森创交流伺服电机该电机的主要技术参数如表2.1所示。
表2.1 森创交流伺服电机参数表在实验时,配合森创的交流伺服驱动器,将电源的U,V,W,GND连接到驱动器的对应接口,将信号线插头插入驱动器相应接头即可使用。
2.3交流伺服驱动器的使用2..3.1交流伺服驱动器连线说明实验时使用的交流伺服驱动器为森创全数字交流伺服驱动器TS系列,其实物图和接口说明见图2.3。
图2.3 森创全数字交流伺服驱动器TS系列主要用到的接口说明如下:1)主回路配线如表2.2所示。
表2.2 主配线回路2)通讯端子CN1的分布编号如图2.4。
各个引脚说明如表2.3。
图2.4 通讯端子编号表2.3 通讯端子说明3)CN2接口说明CN2接口各接口含义如图2.5所示。
图2.5 CN3接口说明4)CN3接口说明编码器CN3接口说明如图2.6所示。
图2.6 编码器引脚说明使用时,驱动器与电机的连接如图2.7所示。
图2.7 编码器与电机的额连线示意图2..3.2交流伺服驱动器控制方式说明主要用到速度控制以及位置控制,控制模式通过按钮MODE进行选择。
按下MODE,将控制项调至Fn_00,设置其为0,即为外部速度运行模式,设置其为2,即为外部位置脉冲运行模式。
下面分别介绍两种常见控制模式。
1)外部速度控制模式通过配置参数Fn_0C,可以调节速度增益,然后根据CN2-16,1的外部模拟量给定-10V~10V信号,即可确定电机运转速度的大小和方向。
2)外部位置脉冲运行模式通过设置Fn_2E选择不同的脉冲指令模式,具体的模式如表2.4所示。
表2.4 脉冲指令模式选择好指令模式之后,只需要将控制器脉冲输出端口接到CN_2的相应端口,就能利用脉冲控制电机位置。
具体的每个脉冲电机旋转多少角度,根据另一指令“1指令单位”进行设定即可。
以上两种模式为实验用到的主要控制模式,关于其他控制模式,参见《交流伺服驱动器TS系列》的驱动器文档,在此不再赘述。
3.步进电机3.1工作原理步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。
步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。
正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系。
目前常用的有三种步进电动机:反应式步进电动机(VR),永磁式步进电动机(PM),混合式步进电动机(HB)。
反应式步进电动机结构简单,生产成本低,步距角小,但动态性能差;永磁式步进电动机出力大,动态性能好,但步距角大;混合式步进电动机综合了反应式、永磁式步进电动机两者的优点。
步进电机工作原理图如3.1所示:图3.1 步进电机工作原理图工作时,电机的定子上有六个均布的磁极,其夹角是60º,转子上均布40个小齿,每个齿的齿距为θE=360º/40=9º。
3.2实验室步进电机实验室采用的步进电机为森创两相四线步进电机,实物图如图3.2所示。
该电机有四根引出线,分别对应为:红色:A+ 蓝色:A- 绿色:B+ 黑色:B-连接时,与驱动器的A+,A-,B+,B-对应即可。