用粒子群算法求解多目标优化问题的Pareto解
- 格式:docx
- 大小:27.70 KB
- 文档页数:13
多目标多约束优化问题算法多目标多约束优化问题是一类复杂的问题,需要使用特殊设计的算法来解决。
以下是一些常用于解决这类问题的算法:1. 多目标遗传算法(Multi-Objective Genetic Algorithm, MOGA):-原理:使用遗传算法的思想,通过进化的方式寻找最优解。
针对多目标问题,采用Pareto 前沿的概念来评价解的优劣。
-特点:能够同时优化多个目标函数,通过维护一组非支配解来表示可能的最优解。
2. 多目标粒子群优化算法(Multi-Objective Particle Swarm Optimization, MOPSO):-原理:基于群体智能的思想,通过模拟鸟群或鱼群的行为,粒子在解空间中搜索最优解。
-特点:能够在解空间中较好地探索多个目标函数的Pareto 前沿。
3. 多目标差分进化算法(Multi-Objective Differential Evolution, MODE):-原理:差分进化算法的变种,通过引入差分向量来生成新的解,并利用Pareto 前沿来指导搜索过程。
-特点:对于高维、非线性、非凸优化问题有较好的性能。
4. 多目标蚁群算法(Multi-Objective Ant Colony Optimization, MOACO):-原理:基于蚁群算法,模拟蚂蚁在搜索食物时的行为,通过信息素的传递来实现全局搜索和局部搜索。
-特点:在处理多目标问题时,采用Pareto 前沿来评估解的质量。
5. 多目标模拟退火算法(Multi-Objective Simulated Annealing, MOSA):-原理:模拟退火算法的变种,通过模拟金属退火的过程,在解空间中逐渐减小温度来搜索最优解。
-特点:能够在搜索过程中以一定的概率接受比当前解更差的解,避免陷入局部最优解。
这些算法在解决多目标多约束优化问题时具有一定的优势,但选择合适的算法还取决于具体问题的性质和约束条件。
粒子群算法怎么寻找帕累托解集的(实用版)目录一、粒子群算法概述二、帕累托解集的概念三、粒子群算法在寻找帕累托解集中的应用四、粒子群算法的优缺点五、总结正文一、粒子群算法概述粒子群算法(Particle Swarm Optimization,简称 PSO)是一种基于群体智能的优化算法,属于进化算法的一种。
它通过模拟粒子在搜索空间中的移动和相互作用,以寻找最优解。
粒子群算法的优点在于其简单易行、收敛速度快以及全局搜索能力较强。
二、帕累托解集的概念帕累托解集(Pareto Set)是指在多目标优化问题中,一组解的集合,其中任意一个解都是最优的,即不存在比它更优的解。
寻找帕累托解集是多目标优化中的一个重要问题。
三、粒子群算法在寻找帕累托解集中的应用粒子群算法在寻找帕累托解集中的应用主要体现在以下几个方面:1.初始化粒子群:根据问题特点,随机生成初始粒子群。
2.评估适应度:对于每个粒子,计算其对应的解的适应度值,用于后续的粒子更新。
3.更新粒子速度和位置:根据粒子的当前速度、位置以及全局最优和个体最优解,更新粒子的速度和位置。
4.检查停止条件:当达到预设的最大迭代次数或全局最优解的适应度值满足预设的阈值时,停止迭代。
5.返回解集:将达到全局最优解的粒子对应的解集合作为帕累托解集的解。
四、粒子群算法的优缺点粒子群算法的优点有:1.简单易行:粒子群算法的规则简单,容易实现。
2.收敛速度快:粒子群算法具有较快的收敛速度,能在较短时间内找到较优解。
3.全局搜索能力较强:粒子群算法中的粒子可以随着搜索空间的变化而调整其速度和位置,具有较强的全局搜索能力。
粒子群算法的缺点有:1.容易陷入局部最优:粒子群算法在寻找最优解的过程中,可能会陷入局部最优解,导致无法找到全局最优解。
2.算法稳定性受影响:粒子群算法中的惯性权重在迭代过程中线性下降,可能导致算法稳定性受到影响。
五、总结粒子群算法作为一种基于群体智能的优化算法,在寻找帕累托解集方面具有一定的优势。
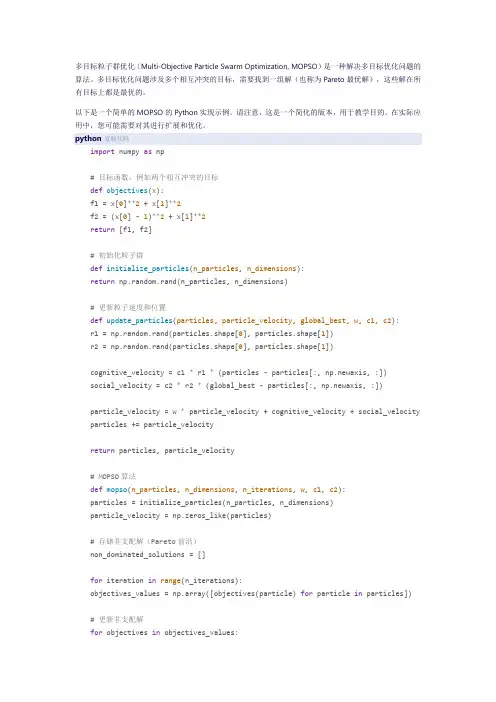
多目标粒子群优化(Multi-Objective Particle Swarm Optimization, MOPSO)是一种解决多目标优化问题的算法。
多目标优化问题涉及多个相互冲突的目标,需要找到一组解(也称为Pareto最优解),这些解在所有目标上都是最优的。
以下是一个简单的MOPSO的Python实现示例。
请注意,这是一个简化的版本,用于教学目的。
在实际应用中,您可能需要对其进行扩展和优化。
python复制代码import numpy as np# 目标函数,例如两个相互冲突的目标def objectives(x):f1 = x[0]**2 + x[1]**2f2 = (x[0] - 1)**2 + x[1]**2return [f1, f2]# 初始化粒子群def initialize_particles(n_particles, n_dimensions):return np.random.rand(n_particles, n_dimensions)# 更新粒子速度和位置def update_particles(particles, particle_velocity, global_best, w, c1, c2):r1 = np.random.rand(particles.shape[0], particles.shape[1])r2 = np.random.rand(particles.shape[0], particles.shape[1])cognitive_velocity = c1 * r1 * (particles - particles[:, np.newaxis, :])social_velocity = c2 * r2 * (global_best - particles[:, np.newaxis, :])particle_velocity = w * particle_velocity + cognitive_velocity + social_velocity particles += particle_velocityreturn particles, particle_velocity# MOPSO算法def mopso(n_particles, n_dimensions, n_iterations, w, c1, c2):particles = initialize_particles(n_particles, n_dimensions)particle_velocity = np.zeros_like(particles)# 存储非支配解(Pareto前沿)non_dominated_solutions = []for iteration in range(n_iterations):objectives_values = np.array([objectives(particle) for particle in particles])# 更新非支配解for objectives in objectives_values:dominated = Falsefor solution in non_dominated_solutions:if all(solution <= objectives) and any(solution < objectives):dominated = Truebreakif not dominated:non_dominated_solutions.append(objectives)# 选择全局最优解global_best = min(non_dominated_solutions, key=lambda x: x[0] if x[1] ==min(non_dominated_solutions, key=lambda x: x[1])[1] else float('inf'))# 更新粒子速度和位置particles, particle_velocity = update_particles(particles, particle_velocity, global_best, w, c1, c2)# 可以在这里添加其他操作,例如输出当前迭代的结果print(f"Iteration {iteration+1}/{n_iterations}, Global Best: {global_best}")return non_dominated_solutions# 运行MOPSO算法n_particles = 100n_dimensions = 2n_iterations = 100w = 0.5c1 = 2.0c2 = 2.0pareto_front = mopso(n_particles, n_dimensions, n_iterations, w, c1, c2)# 输出Pareto前沿print("Pareto Front:")for solution in pareto_front:print(solution)这个示例中,我们定义了一个二维的目标函数,并使用MOPSO来找到Pareto最优解。
-种基于Pareto解集的无约束条件的多目标粒子群算法
宋冠英;李海楠;邹玉静
【期刊名称】《机械工程师》
【年(卷),期】2008(000)005
【摘要】鉴于多目标优化问题的广泛存在性以及目前关于它的研究还较少,且没有一种很好的、通用的多目标PSO算法,本文提出了一种基于Pareto解集的多目标粒子群算法.通过采用一个"记忆体"来存储当前得到的Pareto最优解,对每次迭代得到的Pareto解集里的解两两进行比较以选取一个较优的解作为更新方程中当前最优解,这样可以更好的引导粒子群进行下一步的寻优操作,最终得到一个完整的Pareto最优解集.几个测试函数的仿真实验结果也表明了该算法取得了很好的效果.【总页数】3页(P141-143)
【作者】宋冠英;李海楠;邹玉静
【作者单位】青岛科技大学机电学院,山东,青岛,266061;北京燕山石化有限公司,北京,102500;青岛科技大学机电学院,山东,青岛,266061
【正文语种】中文
【中图分类】TP391.7
【相关文献】
1.一种基于杂草克隆的多目标粒子群算法 [J], 鲁鹏;章卫国;李广文;刘小雄;李想
2.一种基于模糊学习子群的多目标粒子群算法 [J], 江勋林;郭坚毅;唐建;凌海风
3.一种基于显著性和部件模型的无约束条件人脸检测方法 [J], 孔英会;高超;车辚辚
4.一种基于自适应模糊支配的高维多目标粒子群算法 [J], 余伟伟;谢承旺;闭应洲;夏学文;李雄;任柯燕;赵怀瑞;王少锋
5.一种基于健康度的多目标粒子群算法 [J], 胡玉蝶; 张涛; 黄瑾; 郭阳
因版权原因,仅展示原文概要,查看原文内容请购买。
基于粒子群算法求解多目标优化问题一、本文概述随着科技的快速发展和问题的日益复杂化,多目标优化问题在多个领域,如工程设计、经济管理、环境保护等,都显得愈发重要。
传统的优化方法在处理这类问题时,往往难以兼顾多个目标之间的冲突和矛盾,难以求得全局最优解。
因此,寻找一种能够高效处理多目标优化问题的方法,已成为当前研究的热点和难点。
粒子群算法(Particle Swarm Optimization, PSO)作为一种群体智能优化算法,具有收敛速度快、全局搜索能力强等优点,已经在多个领域得到了广泛应用。
近年来,粒子群算法在多目标优化问题上的应用也取得了显著的成果。
本文旨在探讨基于粒子群算法求解多目标优化问题的原理、方法及其应用,为相关领域的研究提供参考和借鉴。
本文首先介绍多目标优化问题的基本概念和特性,分析传统优化方法在处理这类问题时的局限性。
然后,详细阐述粒子群算法的基本原理和流程,以及如何将粒子群算法应用于多目标优化问题。
接着,通过实例分析和实验验证,展示基于粒子群算法的多目标优化方法在实际问题中的应用效果,并分析其优缺点。
对基于粒子群算法的多目标优化方法的发展趋势和前景进行展望,为未来的研究提供方向和建议。
二、多目标优化问题概述多目标优化问题(Multi-Objective Optimization Problem, MOP)是一类广泛存在于工程实践、科学研究以及社会经济等各个领域中的复杂问题。
与单目标优化问题只寻求一个最优解不同,多目标优化问题涉及多个相互冲突的目标,这些目标通常难以同时达到最优。
因此,多目标优化问题的解不再是单一的最优解,而是一组在各个目标之间达到某种平衡的最优解的集合,称为Pareto最优解集。
多目标优化问题的数学模型通常可以描述为:在给定的决策空间内,寻找一组决策变量,使得多个目标函数同时达到最优。
这些目标函数可能是相互矛盾的,例如,在产品设计中,可能同时追求成本最低、性能最优和可靠性最高等多个目标,而这些目标往往难以同时达到最优。
多目标粒子群算法知乎
MOPSO算法的基本思想是通过多个粒子在解空间中最优解,并通过不断的迭代来逼近Pareto最优解集。
Pareto最优解集指的是一组解,其中任何一解的目标函数值都无法被其他解所改善,即不存在一个解同时优于另一个解的所有目标函数值。
MOPSO算法的流程如下:
1.初始化粒子群的位置和速度;
2.计算每个粒子的适应度值(目标函数值);
3. 更新全局最优解(Pareto最优解集);
4.根据适应度值和全局最优解的位置,更新粒子的速度和位置;
5.重复步骤2-4,直到满足停止条件。
MOPSO算法与传统的粒子群算法相比,主要的改进在于多个目标函数值的处理。
传统的粒子群算法只考虑单一的目标函数值,而MOPSO算法可以同时考虑多个目标函数值,通过Pareto最优解集来反映多个目标之间的权衡关系。
通过不断迭代,MOPSO算法可以逼近Pareto最优解集,提供给决策者一组最优的选择方案。
然而,MOPSO算法也存在一些问题。
首先,MOPSO算法可能会陷入局部最优解,无法找到全局最优解。
其次,MOPSO算法需要选择合适的参数值和算法模型,否则可能无法得到有效的结果。
另外,MOPSO算法的计算复杂度较高,对于大规模问题,计算时间和空间开销也较大。
综上所述,MOPSO算法是一种用于解决多目标优化问题的有效算法。
通过利用粒子群和多目标优化的思想,MOPSO算法可以在较短时间内获得
多个最优解,帮助决策者做出合理的选择。
然而,MOPSO算法在实际应用中仍然需要面对一些挑战,需要进一步改进和优化。
![基于Pareto档案粒子群算法的微电网多目标优化方法[发明专利]](https://uimg.taocdn.com/0e35103d360cba1aa911da28.webp)
专利名称:基于Pareto档案粒子群算法的微电网多目标优化方法
专利类型:发明专利
发明人:张倩,丁津津,王群京,黄少雄,郑浩,梁肖,汪伟,王松
申请号:CN201710773989.3
申请日:20170831
公开号:CN107609693A
公开日:
20180119
专利内容由知识产权出版社提供
摘要:本发明针对微电网多目标优化问题转化为单目标优化问题,提供一种基于Pareto档案粒子群算法的微电网多目标优化方法。
该方法,包括建立多个优化目标函数,确定微电网的约束条件,将多个优化目标函数表征的多目标优化问题转换为成单目标优化问题,采用基于Pareto档案粒子群算法对微电网多目标优化进行求解,输出一组非劣解集,根据预设的满意程度评价标准在非劣解集中确定最优解,并对微电网运行进行优化。
本发明采用Pareto档案多目标粒子群优化算法对微电网内各个分布式电源的输出功率包括储能装置的充/放电进行优化求解,将外部档案维护和全局最好位置选取结合在一起,通过比较分析优化结果,验证了算法的有效性和可行性。
申请人:安徽大学,国网安徽省电力公司电力科学研究院,国网安徽省电力公司
地址:230601 安徽省合肥市经济技术开发区九龙路111号
国籍:CN
代理机构:杭州浙科专利事务所(普通合伙)
代理人:吴秉中
更多信息请下载全文后查看。
粒子群算法结合帕累托多目标优化说到粒子群算法,大家肯定不陌生,毕竟它可是优化领域的“明星选手”!一提到这个名字,很多人就能想象出一群小小的粒子,在一个看不见的空间里,像小猫追蝴蝶一样东奔西跑。
它们每一个粒子都有自己的目标,就像每个人都有自己的梦想,大家都在为自己最好的位置而努力。
别看它们个头小,但它们的协作精神可是杠杠的。
粒子群算法的本质,就是通过一群粒子之间的相互合作,来不断找到一个最优解。
但这也有个问题,那就是这个“最优解”有时候可不止一个,怎么办呢?这就引出了我们今天的主角——帕累托多目标优化。
要是你觉得粒子群算法已经够复杂了,那你可得系好安全带,准备好迎接更刺激的挑战了。
想象一下,假设你是一个要在两个目标之间取舍的选手。
一个目标是追求速度,另一个是追求精准度。
怎么选?如果你追求速度,可能就得牺牲一些精准度;如果你拼精准度,速度可能就跟不上了。
如何在这两个目标之间找到一个平衡点,甚至是两者兼得呢?这里就需要用到帕累托最优解了。
帕累托的思路简单而直接:如果你能在一个目标上做到最好,那你可能在另一个目标上就不是最优的。
可是如果你能找到一个位置,它在所有目标上都比其他位置要好,那这个位置就是“帕累托最优解”。
这就像你站在山顶,俯瞰四周,所有的风景都是最美的,别的地方可能也有风景,但都不如你所在的地方好。
但问题来了,粒子群算法虽然能找到一个“最优解”,但是它一次只能优化一个目标,怎么办呢?答案就是——结合帕累托多目标优化。
把粒子群算法和帕累托最优解结合起来,粒子们就可以同时追求多个目标,避免了过去只能选一个目标的尴尬局面。
这就像是你一边做饭,一边打电话,还能偶尔捏捏面团。
看起来很忙乱,但其实每个任务都做得游刃有余。
帕累托多目标优化给粒子群算法带来的改变就像是给它加了双引擎,速度瞬间提升了不止一倍。
粒子们不仅仅在追求单一目标的同时,还能考虑到多个目标的平衡。
就好像你在做饭时,不仅要考虑炒菜的火候,还得同时盯着锅里的汤,确保每个细节都不出差错。
基于粒子群优化算法的多目标优化问题求解摘要多目标优化问题是现代科学技术中经常遇到的问题之一。
传统的优化算法难以有效地解决这类问题,因此需要一种高效的优化算法来解决这种问题。
粒子群优化算法(Particle Swarm Optimization, PSO)作为一种新兴的优化算法,在多目标优化问题中表现出了良好的效果,本文将介绍基于粒子群优化算法的多目标优化问题求解的思路和方法。
1. 引言随着现代科学技术的不断发展,各行各业都涉及到了多目标优化问题。
例如,自动化工厂调度、工厂布局优化、电力系统调度等领域都需要解决多目标优化问题,传统的优化算法在解决这类问题上显得无能为力。
因此,研究高效的解决多目标优化问题的算法已成为当前的研究热点。
2. 多目标优化问题的定义与分类多目标优化问题(Multi-objective Optimization Problem, MOP)是指存在多个相互矛盾的目标函数需要最小化或最大化的优化问题。
多目标优化问题具有多样性、复杂性和不确定性等特点,它的解决涉及到数学、统计、计算机等多个领域。
根据问题的特征,多目标优化问题可分为以下几类:(1)在选择解时采用 Pareto 最优的非支配解集(Pareto Optimal Non-Dominated Solution Set, PONDS)作为解的选择标准,通常称为 Pareto 优化问题。
Pareto优化问题的主要研究方向是改进搜索算法和维护非支配解集。
(2)基于权衡的多目标优化问题。
在权衡的多目标优化问题中,目标函数的权值在不同的情况下有所不同,因此需要对不同权值下的优化结果进行比较,然后选择最优的结果。
该问题通常用加权平均法或效用函数法等方法来求解。
(3)约束多目标优化问题。
约束多目标优化问题是指在多目标优化问题的基础上,加入了约束条件。
该问题中要求解最优解,同时需要满足一定的约束条件。
3. 粒子群优化算法的概述粒子群优化算法(PSO)是一种优化算法,它是由Kennedy和Eberhart在1995年提出的。
粒子群算法怎么寻找帕累托解集的摘要:1.粒子群算法简介2.粒子群算法与帕累托解集3.粒子群算法寻找帕累托解集的步骤4.算法优势与局限5.实际应用案例正文:一、粒子群算法简介粒子群算法(Particle Swarm Optimization,PSO)是一种近年来发展起来的进化算法。
与遗传算法相似,它也是从随机解出发,通过迭代寻找最优解。
但不同于遗传算法的是,粒子群算法规则更为简单,没有交叉和变异操作。
它通过追随当前搜索到的最优值来寻找全局最优。
二、粒子群算法与帕累托解集帕累托解集是指在多目标优化问题中,一组解集合,其中的每个解都比其他解至少在一个目标上更优。
粒子群算法在寻找帕累托解集方面具有优势,因为它能够在搜索过程中保持多样性,从而避免陷入局部最优解。
三、粒子群算法寻找帕累托解集的步骤1.初始化粒子群:随机生成一组潜在解,作为粒子的初始位置。
2.评估适应度:根据问题特点,为每个粒子计算适应度值,评价解的质量。
3.更新个体最优解和全局最优解:将当前搜索到的最优解更新为个体最优解和全局最优解。
4.更新粒子速度和位置:根据个体最优解、全局最优解和当前粒子位置,计算新的粒子速度和位置。
5.重复步骤2-4,直至满足停止条件,如达到最大迭代次数或收敛。
四、算法优势与局限粒子群算法在解决多目标优化问题时具有以下优势:1.全局搜索能力较强:通过不断更新个体最优解和全局最优解,粒子群算法能够在搜索空间中迅速找到较优解。
2.收敛速度较快:相较于其他优化算法,粒子群算法在寻找帕累托解集时具有较快的收敛速度。
3.易于实现:粒子群算法规则简单,编程实现容易。
然而,粒子群算法也存在一定的局限:1.参数选择:粒子群算法的性能与参数设置有关,如惯性权重、学习因子等,需要根据问题特点进行调整。
2.可能陷入局部最优:在某些情况下,粒子群算法可能收敛到局部最优解,而非全局最优解。
五、实际应用案例粒子群算法在众多领域都有广泛应用,如工程设计、信号处理、金融优化等。
一种改进的基于pareto解的多目标粒子群算法
李纬;张兴华
【期刊名称】《计算机仿真》
【年(卷),期】2010(027)005
【摘要】研究一种改进的多目标粒子群优化算法,算法采用精英归档策略,利用粒子的个体最优定位,通过Parato支配关系更新全体粒子最优位置,由档案库中动态提供.根据Pareto支配关系来更新粒子的个体最优位置.使用非劣解目标的密度距离度量非劣解前端的均匀性,通过删除密度距离小的非劣解提高非劣解前端的均匀性.从归档中根据粒子的密度距离大小依照概率选取作为粒子的全局最优位置,以保持解的多样性.标准函数的仿真实验结果表明,所提算法能够获得大量且较均匀的非劣解,快速地收敛于Pareto最优解前端.
【总页数】4页(P96-99)
【作者】李纬;张兴华
【作者单位】南京工业大学自动化学院,江苏,南京,210009;南京工业大学自动化学院,江苏,南京,210009
【正文语种】中文
【中图分类】TP301
【相关文献】
1.基于灵敏度分析的Pareto解改进计算方法 [J], 范培蕾;张晓今;杨涛
2.一种基于黎曼解处理大密度比多相流SPH的改进算法 [J], 杨秋足;徐绯;王璐;杨
扬
3.基于震源机制解反演应力场的一种改进方法[J], P.Martínez-Garzón; Y.Ben-Zion; N.Abolfathian; G.Kwiatek; M.Bohnhoff; 李振月; 李泽潇
4.基于黎曼解的一种SPH改进算法 [J], 徐志宏;汤文辉;张若棋
5.一种基于解区域的感知器改进算法 [J], 邬长安;王新霞;李国梁
因版权原因,仅展示原文概要,查看原文内容请购买。
基于动态Pareto解集的微粒群优化算法及其在多目标规划中
的应用
毕荣山;杨霞;谭心舜;项曙光
【期刊名称】《计算机工程与应用》
【年(卷),期】2004(040)032
【摘要】在传统的微粒群优化算法的基础上,提出了一种基于动态Pareto解集的求解多目标规划问题的方法.Pareto解集在每次迭代过程中进行动态更新和信息共享,在加入新产生的Pareto近似最优解同时去除解集中已经不是Pareto解的数据,每个个体随机地与Pareto解集中的结果进行信息交换,从而保证在快速找到Pareto解的同时保持多样性.并通过三个标准的测试函数证明了算法的有效性.【总页数】4页(P85-88)
【作者】毕荣山;杨霞;谭心舜;项曙光
【作者单位】青岛科技大学计算机与化工研究所,青岛,266042;青岛科技大学计算机与化工研究所,青岛,266042;青岛科技大学计算机与化工研究所,青岛,266042;青岛科技大学计算机与化工研究所,青岛,266042
【正文语种】中文
【中图分类】TP301.6
【相关文献】
1.基于种群规模动态减小的混合微粒群优化算法研究 [J], 刘小丽;曹龙汉;王申涛;代睿;魏石峰;陈洪文
2.基于Pareto解集的多目标优化方法及其应用 [J], 费烨;李楠楠;韩泽光
3.知识工程模型在动态多阶段多目标规划与决策中的应用 [J], 聂振海
4.动态环境下基于微粒群优化算法的数据分类方法研究 [J], 路芳
5.基于Pareto解集分段预测策略的动态多目标进化算法 [J], 马永杰;陈满丽;陈敏因版权原因,仅展示原文概要,查看原文内容请购买。
粒子群算法的多目标优化粒子群算法(Particle Swarm Optimization,PSO)是一种进化算法,用于解决多目标优化问题。
它模仿鸟群、鱼群等动物在搜索食物和避免危险时的群体行为,通过组合个体最优解和全局最优解来优化搜索效果。
PSO算法的核心思想是通过多个粒子在解空间内搜索最优解。
在传统的单目标优化问题中,PSO算法已经得到广泛的应用。
然而,在实际问题中,往往存在多个相互矛盾的目标,这就需要我们寻找多目标优化问题的解决方案。
与单目标优化相比,多目标优化更加复杂,考虑到不同的目标之间可能存在冲突,因此需要将解空间转化为一个多维空间。
因此,如何在多维空间中搜索最优解,就成为了多目标优化问题的核心。
在多目标优化问题中,往往存在多个目标函数,同时需要考虑到不同目标函数之间的权重关系。
PSO算法通过保持多个粒子集群,在解空间上搜索最约束的解,能够很好地解决多目标优化问题。
为了实现这种多目标的求解,我们需要对PSO算法进行一定的修改和扩展。
在多目标优化问题中,最常用的方法是Pareto最优解。
即在多个目标函数的情况下,如果一个个体的任意变量的改变都会导致至少一个目标函数变差,那么这个个体就被称为Pareto最优解。
在PSO算法中,我们可以通过不断迭代,找到不同粒子所占据的Pareto 最优解集合,并在这个集合中选择最优解作为我们的最终解。
为了实现Pareto最优化解,我们需要在PSO算法中设置一些参数。
首先,由于多目标的解决方法涉及到多个目标函数的权重关系,因此需要设置每个目标函数的权重。
其次,我们需要对个体和全局的最优解进行更新,这就需要用到多目标的优化函数。
最后,我们需要选择适当的建立新粒子的方法,以确保搜索最优解避免局部最优解的问题。
综上所述,PSO算法是一种有效的多目标优化算法,在实际问题中具有广泛的应用。
在多目标优化问题中,必须考虑到不同目标函数之间的权重关系和Pareto最优解的搜索方法。
基于粒子群求解帕累托曲面前沿【导读】你好,本文将介绍基于粒子群算法求解帕累托曲面前沿的方法与应用。
我们将简要介绍粒子群算法和帕累托曲面前沿的概念。
我们将详细探讨如何使用粒子群算法来有效地寻找帕累托曲面前沿,并讨论该方法在多目标优化问题中的应用。
我们将总结文章,并分享个人观点和理解。
【正文】一、粒子群算法简介粒子群算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法。
该算法模拟了鸟群或鱼群等生物群体的行为,通过迭代地更新每个个体的速度和位置,以寻找最优解。
粒子群算法具有全局优化能力和较快的收敛速度,在多种优化问题中得到广泛应用。
二、帕累托曲面前沿的概念帕累托曲面前沿(Pareto Front)是多目标优化问题中的重要概念。
在一个多目标优化问题中,我们通常有多个冲突的目标函数,这些目标函数无法同时最小化或最大化。
帕累托曲面前沿是指在这些目标函数空间中,所有不可改进的解组成的集合。
即,如果一个解在某个目标函数上变得更好,那么它在至少一个其他目标函数上变得更坏。
帕累托曲面前沿的目标是找到尽可能多的不可改进的解,以提供决策者在不同目标之间的选择。
三、基于粒子群算法的帕累托曲面前沿求解方法求解帕累托曲面前沿一般可以通过以下步骤进行:1. 初始化粒子群的速度和位置。
2. 计算每个粒子的适应度值,根据其位置在目标函数空间中的表现。
3. 对于每个粒子,更新其速度和位置,遵循粒子群算法的迭代规则。
4. 根据需要,更新粒子群的速度和位置,直到达到指定的停止准则。
5. 通过分析粒子群的最终位置,得到帕累托曲面前沿。
在更新速度和位置的过程中,可以采用不同的策略来保证粒子群的多样性和收敛性。
可以引入控制参数来调整粒子的速度和位置更新幅度,以平衡探索和利用的需求。
还可以在粒子群中引入多样性维护机制,例如控制参数的自适应变化或采用多种不同的速度更新公式。
四、基于粒子群算法的帕累托曲面前沿求解应用基于粒子群算法的帕累托曲面前沿求解方法在多目标优化问题中得到了广泛应用。
基于Pareto邻域交叉算子的多目标粒子群优化算法屈敏;高岳林;江巧永【期刊名称】《计算机应用》【年(卷),期】2011(31)7【摘要】针对粒子群优化(PSO)算法局部搜索能力不足的问题,提出一种基于Pareto邻域交叉算子的多目标粒子群优化算法(MPSOP).该算法利用粒子群优化算法和Pareto邻域交叉算子相结合的策略产生新种群,并利用尺度因子在线调节粒子群优化算法和Pareto邻域交叉算子的贡献量.数值实验选取6个常用测试函数并对NSGA-Ⅱ、SPEA2、MOPSO三个多目标算法进行比较,数值实验结果表明MPSOP算法的有效性.%A multi-objective particle swarm optimization algorithm with Pareto neighborhood crossover operation (MPSOP) was propesed to solve the defect of local search in particle swarm optimization algorithm. MPSOP combined particle swarm optimization algorithm and Pareto neighborhood crossover operation to generate a new population. A scaling factor was used to balance contributions of particle swarm optimization algorithm and Pareto neighborhood crossover operation. Numerical experiments were conducted ti compared MOSOP with NSGA-Ⅱ, AND SPEA2 on six benchmark proble ms. The numerical results show the effectiveness of MPSOP.【总页数】4页(P1789-1792)【作者】屈敏;高岳林;江巧永【作者单位】北方民族大学信息与系统科学研究所,银川,750021;北方民族大学信息与系统科学研究所,银川,750021;北方民族大学信息与系统科学研究所,银川,750021【正文语种】中文【中图分类】TP18【相关文献】1.基于Pareto多目标粒子群优化算法的物流服务供应商选择决策研究 [J], 张咪;严广乐2.融合Pareto邻域交叉算子的多目标分布估计算法 [J], 江巧永;高岳林3.基于Pareto熵的多目标粒子群优化算法∗ [J], 胡旺;Gary G.YEN;张鑫4.一种基于Pareto关联度支配的多目标粒子群优化算法 [J], 汤可宗;李佐勇;詹棠森;李芳;姜云昊5.基于Pareto多目标粒子群优化算法的物流服务供应商选择决策研究 [J], 张咪;严广乐因版权原因,仅展示原文概要,查看原文内容请购买。
粒子群算法怎么寻找帕累托解集的标题:粒子群算法在多目标优化问题中的应用:从帕累托解集的寻找谈起导语:在现实生活和工程领域中,我们通常面临着复杂的决策问题,这些问题涉及到多个相互竞争的目标。
传统的优化算法往往无法同时满足各个目标,因此人们开始研究并应用多目标优化算法。
本文将介绍一种经典的多目标优化算法——粒子群算法,着重探讨其在寻找帕累托解集方面的应用与优势。
一、什么是多目标优化问题多目标优化问题是指有多个冲突的目标函数同时需要优化的问题。
在工程设计中,我们可能需要在成本、性能和可靠性几个维度上进行优化。
通常情况下,这些目标之间是相互矛盾的,无法通过单一的优化方案来达到最优。
二、多目标优化中的帕累托解集帕累托解集(Pareto Optimal Set)是多目标优化问题中的一个重要概念。
它表示的是在没有任何目标值得到改善的情况下,无法通过调整一个目标来改善其他目标。
帕累托解集中的解被称为非支配解,即不存在其他解能够在所有目标上都优于该解。
三、粒子群算法基本原理粒子群算法(Particle Swarm Optimization,简称PSO)是一种基于群体协作的启发式优化算法。
它受到鸟群觅食行为的启发,将待优化问题看作粒子在解空间中的移动过程。
每个粒子根据自身的经验和群体的最优解进行调整,以寻找全局最优解。
粒子群算法的基本流程如下:1. 初始化粒子群的位置和速度;2. 计算每个粒子的适应度值;3. 更新粒子的速度和位置;4. 更新全局最优解;5. 重复步骤2-4,直到满足终止条件。
四、粒子群算法在帕累托解集寻找中的应用粒子群算法在求解多目标优化问题中的帕累托解集具有以下特点和优势:1. 多样性维持:粒子群算法通过调整粒子的速度和位置来实现全局搜索和局部搜索的平衡,从而能够保持帕累托解集的多样性。
2. 收敛性改善:粒子群算法通过引入惯性权重和加速度因子等参数,能够有效改善算法的收敛性,使得粒子能够更好地收敛到帕累托解集附近。
粒子群算法程序ticD=10;%粒子群中粒子的个数%w=0.729;%w为惯性因子wmin=1.2;wmax=1.4;c1=1.49445;%正常数,成为加速因子c2=1.49445;%正常数,成为加速因子Loop_max=50;%最大迭代次数%初始化粒子群for i=1:DX(i)=rand(1)*(-5-7)+7;V(i)=1;f1(i)=X(i)^2;f2(i)=(X(i)-2)^2;endLoop=1;%迭代计数器while Loop<=Loop_max%循环终止条件%对粒子群中的每个粒子进行评价for i=1:Dk1=find(1==Xv(i,:));%找出第一辆车配送的城市编号nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xr(i,k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1(i)=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xr(i,:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1(i)=G1(i)+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1(i)=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1(i)=L1(i)+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1(i)=0;%第一辆车的配送量设为0L1(i)=0;%第一辆车的配送路径长度设为0endk2=find(2==Xv(i,:));%找出第二辆车配送的城市编号nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xr(i,k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2(i)=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xr(i,:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2(i)=G2(i)+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2(i)=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2(i)=L2(i)+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2(i)=0;%第二辆车的配送量设为0L2(i)=0;%第二辆车的配送路径长度设为0endk3=find(3==Xv(i,:));%找出第三辆车配送的城市编号nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xr(i,k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3(i)=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xr(i,:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3(i)=G3(i)+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3(i)=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3(i)=L3(i)+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3(i)=0;%第三辆车的配送量设为0L3(i)=0;%第三辆车的配送路径长度设为0endL(i)=0;%初始化每个粒子对应的配送方案总路径长度L(i)=L1(i)+L2(i)+L3(i);%计算每个粒子对应的配送方案总路径长度if L(i)<Lg&&G1(i)<Q&&G2(i)<Q&&G3(i)<Q%如果第i个粒子的总路径长度优于历史最优粒子并且满足车辆容量要求Xvg(:)=Xv(i,:);%将粒子i设为历史最优粒子Xrg(:)=Xr(i,:);%将粒子i设为历史最优粒子Lg=L(i);%将粒子i的总路径长度设为最优粒子对应的配送方案的总路径长度elseXvg(:)=Xvg(:);%最优粒子保持不变Xrg(:)=Xrg(:);%最优粒子保持不变Lg=Lg;%最优粒子所对应的配送方案的总路径长度也不变endLimin(i)=100000;%初始化每个粒子代表的配送方案的历史最优总路径长度if L(i)<Limin(i)%如果本次循环得到的总路径长度优于粒子i历史最优总路径长度Limin(i)=L(i);%更新本次循环得到的总路径长度为粒子i的历史最优路径长度Xvl(i,:)=Xv(i,:);%更新本次得到的粒子i为i粒子的历史最优位置Xrl(i,:)=Xr(i,:); %更新本次得到的粒子i为i粒子的历史最优位置else%否则,保持粒子i的历史最优位置及历史最优路径长度不变Limin(i)=LL(i);Xvl(i,:)=Xv1(i,:);Xrl(i,:)=Xr1(i,:);endend%记录本次循环得到的所有粒子的位置for i=1:Dfor j=1:NXv1(i,j)=Xvl(i,j);%记录本次循环得到的所有粒子的位置Xr1(i,j)=Xrl(i,j);%记录本次循环得到的所有离子的位置endendLL(i)=0;%初始化每个粒子的历史最优路径总长度for i=1:DLL(i)=Limin(i);%对每个粒子的历史最优路径总长度进行赋值end%对粒子群中每个粒子进行迭代w=wmin+(wmax-wmin)*exp((-Loop)/(Loop_max-Loop));for i=1:Dfor j=1:NVv(i,j)=w*Vv(i,j)+c1*rand(1)*(Xvl(i,j)-Xv(i,j))+c2*rand(1)*(Xvg(1,j)-Xv(i,j));%计算位置变化率Vr(i,j)=w*Vr(i,j)+c1*rand(1)*(Xrl(i,j)-Xr(i,j))+c2*rand(1)*(Xrg(1,j)-Xr(i,j));%计算位置变化率%Vv(i,j)和Vr(i,j)进行上下限的限制if Vv(i,j)>K-1Vv(i,j)=K-1;elseif Vv(i,j)<1-KVv(i,j)=1-K;elseVv(i,j)=Vv(i,j);endendendfor i=1:Dfor j=1:NXv(i,j)=ceil(Xv(i,j)+Vv(i,j));%更新位置坐标%对Xv(i,j)进行上下限的限制if Xv(i,j)>KXv(i,j)=K;elseif Xv(i,j)<1Xv(i,j)=1;elseXv(i,j)=Xv(i,j);endXr(i,j)=Xr(i,j)+Vr(i,j);%更新位置坐标endendLoop=Loop+1;endXvg%输出粒子群中的最优粒子Xrg%输出粒子群中的最优粒子Lg%输出最优粒子所代表方案的总路径长度Loop%输出迭代的次数%计算最优粒子所代表的配送方案k1=find(1==Xvg(:));%找出第一辆车配送的城市编号k1=k1';nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xrg(k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xrg(:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1=G1+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1=L1+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1=0;%第一辆车的配送量设为0L1=0;%第一辆车的配送路径长度设为0endk2=find(2==Xvg(:));%找出第二辆车配送的城市编号k2=k2';nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xrg(k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xrg(:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2=G2+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2=L2+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2=0;%第二辆车的配送量设为0L2=0;%第二辆车的配送路径长度设为0endk3=find(3==Xvg(:));%找出第三辆车配送的城市编号k3=k3';nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xrg(k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xrg(:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3=G3+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3=L3+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3=0;%第三辆车的配送量设为0L3=0;%第三辆车的配送路径长度设为0endk61k62k63x=City(:,1);y=City(:,2);%对各个城市进行顺序标号max_text={'0','1','2','3','4','5','6','7',};text(x+1,y+1,max_text)%画出最优粒子所代表的配送方案路径for i=1:nb1+2short1(i)=k61(i)+1;endfor i=1:nb2+2short2(i)=k62(i)+1;endfor i=1:nb3+2short3(i)=k63(i)+1;endline(x(short1),y(short1),'Marker','o')line(x(short2),y(short2),'Marker','o')line(x(short3),y(short3),'Marker','o')toc%计算程序的运行时间Time=num2str(toc)clear allticK=3;%车辆数D=200;%粒子群中粒子的个数Q=1;%每辆车的容量%w=0.729;%w为惯性因子wmin=1.2;wmax=1.4;c1=1.49445;%正常数,成为加速因子c2=1.49445;%正常数,成为加速因子Loop_max=50;%最大迭代次数%初始化城市坐标City=[18,54;22,60;58,69;71,71;83,46;91,38;24,42;18,40];n=size(City,1);%城市个数,包含中心仓库N=n-1;%发货点任务数for i=1:nfor j=1:nDistance(i,j)=sqrt((City(i,1)-City(j,1))^2+(City(i,2)-City(j,2))^2);%各城市节点之间的距离矩阵endendg=[0,0.89,0.14,0.28,0.33,0.21,0.41,0.57];%各发货点的货运量%初始化粒子群for i=1:Dfor j=1:NXv(i,j)=randi(K,1);%初始化粒子群中粒子的位置Vv(i,j)=randi(2*K-1,1)-K;%初始化粒子群中粒子的位置变化率Vr(i,j)=randi(2*N-1,1)-N;%初始化粒子群中离子的位置变化率Xvl(i,j)=Xv(i,j);%初始化粒子群中每个粒子的最优位置endendfor i=1:Da=randperm(N);for j=1:NXr(i,j)=a(j);%初始化粒子群中粒子的位置Xrl(i,j)=Xr(i,j);%初始化粒子群中每个粒子的最优位置endendLg=100000;%初始化最优粒子对应的配送方案的总路径长度Xvg=ones(1,N);%粒子群中最优的粒子Xrg=ones(1,N);%粒子群中最优的粒子Loop=1;%迭代计数器while Loop<=Loop_max%循环终止条件%对粒子群中的每个粒子进行评价for i=1:Dk1=find(1==Xv(i,:));%找出第一辆车配送的城市编号nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xr(i,k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1(i)=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xr(i,:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1(i)=G1(i)+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1(i)=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1(i)=L1(i)+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1(i)=0;%第一辆车的配送量设为0L1(i)=0;%第一辆车的配送路径长度设为0endk2=find(2==Xv(i,:));%找出第二辆车配送的城市编号nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xr(i,k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2(i)=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xr(i,:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2(i)=G2(i)+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2(i)=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2(i)=L2(i)+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2(i)=0;%第二辆车的配送量设为0L2(i)=0;%第二辆车的配送路径长度设为0endk3=find(3==Xv(i,:));%找出第三辆车配送的城市编号nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xr(i,k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3(i)=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xr(i,:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3(i)=G3(i)+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3(i)=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3(i)=L3(i)+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3(i)=0;%第三辆车的配送量设为0L3(i)=0;%第三辆车的配送路径长度设为0endL(i)=0;%初始化每个粒子对应的配送方案总路径长度L(i)=L1(i)+L2(i)+L3(i);%计算每个粒子对应的配送方案总路径长度if L(i)<Lg&&G1(i)<Q&&G2(i)<Q&&G3(i)<Q%如果第i个粒子的总路径长度优于历史最优粒子并且满足车辆容量要求Xvg(:)=Xv(i,:);%将粒子i设为历史最优粒子Xrg(:)=Xr(i,:);%将粒子i设为历史最优粒子Lg=L(i);%将粒子i的总路径长度设为最优粒子对应的配送方案的总路径长度elseXvg(:)=Xvg(:);%最优粒子保持不变Xrg(:)=Xrg(:);%最优粒子保持不变Lg=Lg;%最优粒子所对应的配送方案的总路径长度也不变endLimin(i)=100000;%初始化每个粒子代表的配送方案的历史最优总路径长度if L(i)<Limin(i)%如果本次循环得到的总路径长度优于粒子i历史最优总路径长度Limin(i)=L(i);%更新本次循环得到的总路径长度为粒子i的历史最优路径长度Xvl(i,:)=Xv(i,:);%更新本次得到的粒子i为i粒子的历史最优位置Xrl(i,:)=Xr(i,:); %更新本次得到的粒子i为i粒子的历史最优位置else%否则,保持粒子i的历史最优位置及历史最优路径长度不变Limin(i)=LL(i);Xvl(i,:)=Xv1(i,:);Xrl(i,:)=Xr1(i,:);endend%记录本次循环得到的所有粒子的位置for i=1:Dfor j=1:NXv1(i,j)=Xvl(i,j);%记录本次循环得到的所有粒子的位置Xr1(i,j)=Xrl(i,j);%记录本次循环得到的所有离子的位置endendLL(i)=0;%初始化每个粒子的历史最优路径总长度for i=1:DLL(i)=Limin(i);%对每个粒子的历史最优路径总长度进行赋值end%对粒子群中每个粒子进行迭代w=wmin+(wmax-wmin)*exp((-Loop)/(Loop_max-Loop));for i=1:Dfor j=1:NVv(i,j)=w*Vv(i,j)+c1*rand(1)*(Xvl(i,j)-Xv(i,j))+c2*rand(1)*(Xvg(1,j)-Xv(i,j));%计算位置变化率Vr(i,j)=w*Vr(i,j)+c1*rand(1)*(Xrl(i,j)-Xr(i,j))+c2*rand(1)*(Xrg(1,j)-Xr(i,j));%计算位置变化率%Vv(i,j)和Vr(i,j)进行上下限的限制if Vv(i,j)>K-1Vv(i,j)=K-1;elseif Vv(i,j)<1-KVv(i,j)=1-K;elseVv(i,j)=Vv(i,j);endendendfor i=1:Dfor j=1:NXv(i,j)=ceil(Xv(i,j)+Vv(i,j));%更新位置坐标%对Xv(i,j)进行上下限的限制if Xv(i,j)>KXv(i,j)=K;elseif Xv(i,j)<1Xv(i,j)=1;elseXv(i,j)=Xv(i,j);endXr(i,j)=Xr(i,j)+Vr(i,j);%更新位置坐标endendLoop=Loop+1;endXvg%输出粒子群中的最优粒子Xrg%输出粒子群中的最优粒子Lg%输出最优粒子所代表方案的总路径长度Loop%输出迭代的次数%计算最优粒子所代表的配送方案k1=find(1==Xvg(:));%找出第一辆车配送的城市编号k1=k1';nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xrg(k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xrg(:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1=G1+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1=L1+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1=0;%第一辆车的配送量设为0L1=0;%第一辆车的配送路径长度设为0endk2=find(2==Xvg(:));%找出第二辆车配送的城市编号k2=k2';nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xrg(k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xrg(:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2=G2+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2=L2+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2=0;%第二辆车的配送量设为0L2=0;%第二辆车的配送路径长度设为0endk3=find(3==Xvg(:));%找出第三辆车配送的城市编号k3=k3';nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xrg(k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xrg(:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3=G3+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3=L3+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3=0;%第三辆车的配送量设为0L3=0;%第三辆车的配送路径长度设为0endk61k62k63x=City(:,1);y=City(:,2);%对各个城市进行顺序标号max_text={'0','1','2','3','4','5','6','7',};text(x+1,y+1,max_text)%画出最优粒子所代表的配送方案路径for i=1:nb1+2short1(i)=k61(i)+1;endfor i=1:nb2+2short2(i)=k62(i)+1;endfor i=1:nb3+2short3(i)=k63(i)+1;endline(x(short1),y(short1),'Marker','o') line(x(short2),y(short2),'Marker','o') line(x(short3),y(short3),'Marker','o') toc%计算程序的运行时间Time=num2str(toc)clear all。