labview与松下A6伺服 高精度闭环运动控制 Modbus通讯
- 格式:pptx
- 大小:3.28 MB
- 文档页数:14
LabVIEW模块之Modbus介绍Modbus简介Modbus通常用于设备之间的监控和数据采集(SCADA)式网络通信。
例如,大型服务器可用于控制可编程逻辑控制器(PLC)或可编程自动化控制器(PAC),而PLC / PAC可依次掌握传感器,阀门,电动机或任何其他嵌入式设备。
为了满足这些需求,Modbus被设计为一种请求- 响应协议,具有灵活的数据和功能模型功能,这是它至今仍在使用的部分原因。
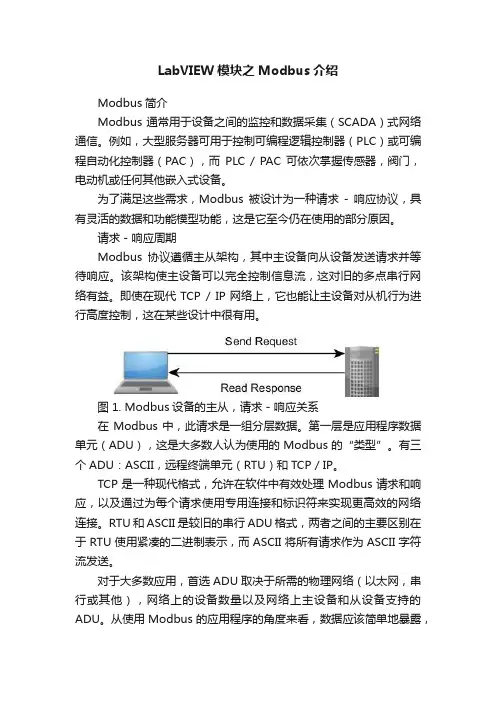
请求 - 响应周期Modbus协议遵循主从架构,其中主设备向从设备发送请求并等待响应。
该架构使主设备可以完全控制信息流,这对旧的多点串行网络有益。
即使在现代TCP / IP网络上,它也能让主设备对从机行为进行高度控制,这在某些设计中很有用。
图 1. Modbus设备的主从,请求 - 响应关系在Modbus中,此请求是一组分层数据。
第一层是应用程序数据单元(ADU),这是大多数人认为使用的Modbus的“类型”。
有三个ADU:ASCII,远程终端单元(RTU)和TCP / IP。
TCP是一种现代格式,允许在软件中有效处理Modbus请求和响应,以及通过为每个请求使用专用连接和标识符来实现更高效的网络连接。
RTU和ASCII是较旧的串行ADU格式,两者之间的主要区别在于RTU使用紧凑的二进制表示,而ASCII将所有请求作为ASCII字符流发送。
对于大多数应用,首选ADU取决于所需的物理网络(以太网,串行或其他),网络上的设备数量以及网络上主设备和从设备支持的ADU。
从使用Modbus的应用程序的角度来看,数据应该简单地暴露,就好像ADU不存在一样。
在每个ADU中,有一个协议数据单元(PDU),它是Modbus 协议的核心。
每个PDU包含功能代码和相关数据。
每个功能代码都有一个明确定义的响应,您可以将此功能代码视为发送给从站的命令。
在某些情况下,可能会发生错误。
Modbus为异常定义了一个特定的PDU,让主人知道发生了什么。
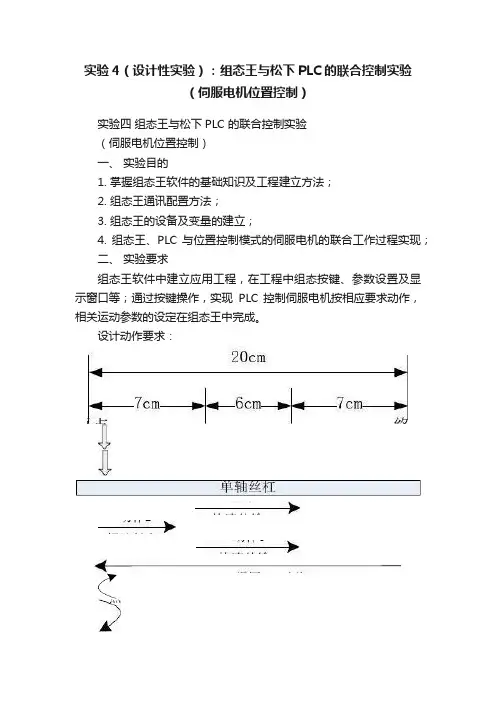
实验4(设计性实验):组态王与松下PLC的联合控制实验(伺服电机位置控制)实验四组态王与松下PLC 的联合控制实验(伺服电机位置控制)一、实验目的1. 掌握组态王软件的基础知识及工程建立方法;2. 组态王通讯配置方法;3. 组态王的设备及变量的建立;4. 组态王、PLC 与位置控制模式的伺服电机的联合工作过程实现;二、实验要求组态王软件中建立应用工程,在工程中组态按键、参数设置及显示窗口等;通过按键操作,实现PLC 控制伺服电机按相应要求动作,相关运动参数的设定在组态王中完成。
设计动作要求:其中:动作1、动作2、动作3及动作5的运行速度可以在组态王中设定;动作4,指示灯点亮的延时时间可设定;组态王中,启动按键按下,动作开始执行;暂停按键按下,停止当前运行;按下停止键后,机械轴复位至原点。
三、实验原理参照参考资料。
循环2S 动作4四、实验内容及步骤1.实验内容:(1)建立组态王工程,并在工程中建立PLC设备,完成通讯设置;(2)组态按键、指示灯及参数设置框;(3)建立与PLC内部寄存器相关联的变量;(4)编写PLC控制程序2.实验步骤:1)完成连线及连线检查;2)接通总控台电源开关;3)启动计算机,运行松下PLC编程软件,并建立相应的工程及梯形图;4)新建一个组态王工程,配置好通讯线,按实验内容建立组态界面;5)编写好所有程序后,观察程序运行及程序调试;6)实验完毕关闭清理桌面,关闭电源开关。
五、实验报告1.绘制系统控制框图及流程图;2.组态王通讯及PLC的关联变量建立;3.PLC运行程序的编写以组态王软件组态。
六、程序示例。
LabVIEW在机器人控制中的应用实现精准的运动控制和路径规划LabVIEW是一种基于图形化编程的集成开发环境(IDE),它被广泛应用于工业自动化、仪器仪表、机器人控制等领域。
在机器人控制方面,LabVIEW具有强大的功能和灵活的性能,可以帮助实现精准的运动控制和路径规划。
本文将介绍LabVIEW在机器人控制中的应用,并探讨其实现精准控制的相关技术。
一、LabVIEW在机器人控制中的应用LabVIEW作为一种强大的开发平台,可以与各种传感器、执行器和控制器进行无缝集成,从而实现对机器人的全面控制。
它通过可视化的界面和直观的图形化编程语言,使得机器人的控制和调试工作更加简单和高效。
1.运动控制LabVIEW可以通过与运动控制卡的配合,实现对机器人的运动控制。
运动控制卡作为介于计算机和执行器之间的接口,可以接收来自计算机的指令,并将其转化为电信号,控制执行器的运动。
而LabVIEW则负责生成相应的指令,并将其发送给运动控制卡,从而实现对机器人的精确控制。
通过LabVIEW的图形化编程界面,用户可以直观地设置机器人的运动参数,例如速度、加速度、位置等,以及运动轨迹的规划和控制。
这大大简化了机器人的操作和调试过程。
2.路径规划机器人在执行任务时,除了需要精确的运动控制,还需要合理的路径规划,以便避开障碍物和遵循预定的轨迹。
LabVIEW提供了各种路径规划算法和函数库,可以帮助用户生成最优的机器人路径。
例如,用户可以使用A*算法或Dijkstra算法进行路径搜索,并通过LabVIEW的图形化界面对搜索结果进行可视化显示。
此外,LabVIEW还支持动态路径规划,即根据实时环境信息动态调整机器人的路径,以适应复杂和变化的工作环境。
这使得机器人能够快速应对各种情况,并保证任务的高效完成。
二、LabVIEW实现精准控制的相关技术除了上述提到的运动控制和路径规划功能,LabVIEW还具备一些其他的技术和工具,可以帮助实现机器人的精准控制。
LabVIEW与机器人控制实现机器人运动控制在现代工业和科研领域中,机器人的运动控制是一个关键的技术。
为了实现精确、高效的机器人控制,科学家和工程师们利用了一种被称为LabVIEW的编程环境。
LabVIEW是一种图形化编程语言,它使用图形符号来代表程序的各个组成部分,使得程序设计变得直观而易于理解。
本文将介绍LabVIEW与机器人控制的结合,并探讨如何利用LabVIEW来实现机器人的运动控制。
一、LabVIEW概述LabVIEW(全称Laboratory Virtual Instrument Engineering Workbench,即实验室虚拟仪器工程化工作台)是由美国国家仪器公司(National Instruments)开发的一种图形化编程环境。
它以其直观、易于使用的特点而受到广泛的欢迎。
在LabVIEW中,程序员通过将图形符号连接起来来表示程序的逻辑结构,这些符号被称为虚拟仪器(Virtual Instrument)。
虚拟仪器中的图形符号代表了不同的函数或操作,通过将这些符号组合在一起,就可以实现复杂的功能。
二、LabVIEW在机器人控制中的应用1.机器人控制的基本步骤在介绍LabVIEW在机器人控制中的应用之前,我们首先来了解一下机器人控制的基本步骤。
(1)传感器读取:机器人通过传感器获取周围环境的信息,例如距离、角度、压力等。
(2)信号处理:机器人将传感器获取的原始数据进行处理,得到需要的信息。
(3)决策与规划:机器人根据信号处理的结果进行决策和规划,确定下一步的动作。
(4)执行控制:机器人根据决策和规划结果,通过执行器控制自身的运动。
2.利用LabVIEW实现机器人控制利用LabVIEW可以方便地进行机器人控制,下面将介绍LabVIEW 在机器人控制中的几个关键应用。
(1)传感器读取与数据处理:LabVIEW提供了丰富的传感器支持库,可以很方便地读取各种传感器的数据。
通过LabVIEW的图形化编程界面,可以将传感器读取的数据进行处理,提取出需要的信息。
二〇〇八年・第二期研究报告基于 LabVI E W 的 M odbus 串口通讯协议的实现袁雪陈斌鲁中巍管国强(江苏大学机械学院镇江 212013摘要本文简要地介绍 Modbus 通信协议 , 详细的阐述以 PC 机作为上位机 , Labvie w711作为上位机软件开发平台的主从式串口通信程序的实现。
经过测试 , 该程序可在基于 labvie w 的测控系统中加以实际应用。
关键词 Labvie w P LC 串口通信 Modbus 协议引言Lab V I E W (laborat ory virtual instru ment 2 ing workbench境 ,软件 , 。
Lab V I E W , VX I, RS 2232和 RS 2485, 还内置了支持 T CP /I P, ActiveX 等软件标准的库函数 , 其图形化编程语言环境 , 简单直观 , 极大节省程序开发时间 , 可以完成各种各样的编程任务。
本文详细介绍基于 labvie w711开发平台实现 Modbus 通讯协议的方法 , 该程序可用于上位机与下位 P LC 的串口通讯程序。
在实际测试中 , 上位机通过串口 RS232转 RS485与下位台达 P LC 进行通讯 , 被测参数的大量实时信号通过串口传送给上位 PC 机 , 上位机可以对接收到的这些参数进行实时数据显示、趋势图显示、数据查询和管理 , 还可以对下位 P LC 进行参数控制和曲线控制。
1 M odbus 协议简介〔 1〕Modbus 通信协议是应用于电子控制器上的一种通用语言 , 通过此协议控制器相互之间、控制器经由网络和其它设备之间可以通信 , 它已经成为一通用工业标准。
不同厂商生产的控制设备可以连成工业网络 , 进行集中监控。
111 Mo dbu s 协议两种串口传输方式Modbus 协议定义两种数据传输方式 , 即 ASC II 模式和 RT U 模式。
基于LabVIEW和MPScope的多轴伺服电机控制系统开发与应用王辉;昝涛;刘智豪;庞兆亮【摘要】为了满足多轴伺服电机控制系统研发的需求,缩短开发周期,增强系统的稳定性,提出一种基于LabVIEW和MPScope的多轴伺服电机控制系统的设计方法.该方法采用工控机+运动控制器+驱动器系统结构,由工控机控制系统运行,通过上位机软件调整控制参数及控制策略,利用MPScope软件实现工控机与运动控制器的通讯,最终实现多轴电机的控制.通过对该系统进行机器人应用测试,各个轴具有很好的控制精度,并能完成机器人的各种动作.应用结果表明,该方法结构简单、性能稳定、控制精度高,适用于各种多轴伺服电机联动控制,具有很高的移植性和扩展性.【期刊名称】《制造业自动化》【年(卷),期】2018(040)006【总页数】5页(P40-43,67)【关键词】LabVIEW;MPScope;伺服电机控制;多轴控制【作者】王辉;昝涛;刘智豪;庞兆亮【作者单位】北京工业大学先进制造技术北京市重点实验室,北京 100124;北京工业大学先进制造技术北京市重点实验室,北京 100124;北京工业大学先进制造技术北京市重点实验室,北京 100124;北京工业大学先进制造技术北京市重点实验室,北京 100124【正文语种】中文【中图分类】TP2730 引言随着社会发展的需要,各制造企业对机器装备自动化、智能化水平的要求不断提高,做为核心技术的运动控制系统,其作用更为突出[1]。
目前控制技术的发展日新月异,运动控制系统向着小型化、网络化和智能化的方向发展,要求控制器具有优异的系统性能、易于模块化移植和较高的可靠性[2]。
为满足这些要求,控制系统多采用分布式控制方式,即由上位机实现不同的轨迹规划和控制算法,由下位机实现插补细分和控制优化,上位机和下位机通过通讯总线相互协调工作。
这种控制系统有多种实现方式,文献[3]利用工业控制计算机作为上位机和可编程控制器(PLC)为下位机建立两级分布式旋压机控制系统;文献[4]采用ARM处理器和LM629运动控制芯片作为上、下位机开发出直流伺服电机控制系统;文献[5]提出将AT89C52单片机作为下位机,利用PC机作为上位机设计多轴电机控制系统。
LabVIEW与运动控制技术实现精确的运动控制和位置反馈随着科技的不断进步和应用领域的扩大,各种控制系统逐渐成为工业自动化中的重要组成部分。
在众多控制技术中,LabVIEW与运动控制技术的结合为实现精确的运动控制和位置反馈提供了一种高效可行的方案。
本文将介绍LabVIEW与运动控制技术的原理和应用,并探讨其在实际工程中的意义和作用。
一、LabVIEW与运动控制技术概述1.1 LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种基于图形化编程语言G语言的集成开发环境。
它通过将计算机软件和硬件结合起来,实现了对各类仪器设备的高效控制和数据采集处理。
LabVIEW由美国国家仪器公司(NI)开发,广泛应用于自动化控制、测试测量、数据采集等领域。
1.2 运动控制技术简介运动控制技术是指通过控制设备的运动轨迹和速度,实现对设备位置和运动状态的精确控制。
在工业自动化生产中,运动控制技术常用于机器人、数控机床、自动化输送线等设备中,以实现高效稳定的生产流程。
二、LabVIEW在运动控制中的应用2.1 运动控制与数据采集的结合LabVIEW通过与各类运动控制设备的连接,实现了控制信号与数据采集信号的实时传输和处理。
通过LabVIEW平台,我们可以轻松地对设备的位置、速度、加速度等参数进行监控和调节,进而实现对设备的精确控制。
2.2 运动控制中的位置反馈精确的位置反馈是实现运动控制的关键因素之一。
LabVIEW提供了灵活的编程接口,可以与各类位置传感器(如编码器、激光测距仪等)进行无缝集成。
通过实时采集并处理传感器数据,LabVIEW可以准确获取设备的位置信息,并与设定的目标位置进行比较和调整,实现精确的位置控制。
2.3 运动控制系统的协同组合在复杂的工业控制系统中,通常会涉及多个运动控制设备的协同工作。
LabVIEW提供了灵活且强大的编程能力,可以通过编写程序实现不同设备的协调控制。
基于LabVIEW的偶合器闭环控制系统设计丁蓉;李岳峰;刘逸斐;崔向海【摘要】本文通过LabVIEW软件进行了偶合器闭环控制系统的设计,并且通过台架试验验证了该闭环控制系统的可行性.【期刊名称】《传动技术》【年(卷),期】2013(027)004【总页数】4页(P14-17)【关键词】LabVIEW;偶合器;闭环控制【作者】丁蓉;李岳峰;刘逸斐;崔向海【作者单位】中国船舶重工集团公司第七一一研究所,上海200090;中国船舶重工集团公司第七一一研究所,上海200090;中国船舶重工集团公司第七一一研究所,上海200090;中国船舶重工集团公司第七一一研究所,上海200090【正文语种】中文【中图分类】TH137.3311 前言调速型液力偶合器具有起动平稳、无级变速、缓冲隔振、过载保护、节能等优点,可使风机、水泵在不同工况下稳定运行,满足设备的实际使用需求并具有显著节能效果,在电力、钢铁等领域得到广泛应用。
现有调速液力偶合器主要通过电动执行器进行开环调速,控制精度较低,不能有效满足调速控制的需要。
采用虚拟仪器图形化编程软件LabVIEW可以实现对偶合器的速度控制。
2 控制系统组成与工作原理偶合器闭环控制系统的组成如图1所示,主要由一台工控机、一块NI6014多功能卡、一台智能操作器、一台微机测速仪以及偶合器和电动执行器组成。
图1 控制系统组成图Fig.1 Control system combination diagram在工控机中由LabVIEW程序计算出应该发出0~5V的控制电压,然后通过NI6014卡发出,这个电压通过直流放大器转换成4~20mA的电流进入智能操作器控制电动执行器正转或者反转以使偶合器增速或者减速。
另一方面,偶合器的转速由转速传感器采集通过微机测速仪反馈4~20mA到NI6014卡,传到工控机LabVIEW程序计算得出。
3 系统软件设计总系统由两个闭环控制系统组成,一个闭环控制系统通过硬件完成,当智能操作器得到NI6014发出的0~20mA阀位控制信号时相应控制电动执行器正转或者反转以达到调速的目的,同时电动执行器会反馈给智能操作器一个0~20mA的位置反馈信号,当控制信号和反馈信号相等时电动执行器停止转动,否则会相应正转或者反转。
基于LabVIEW的Modbus ASCII串行通信的实现
王水鱼;李宁
【期刊名称】《陕西理工学院学报(自然科学版)》
【年(卷),期】2008(24)2
【摘要】Modbus协议是应用于电子控制器上的一种通用协议,通过此协议,控制器之间、控制器经由网络和其他设备之间可以进行通信.由于此协议的简单和通用性,在工业控制系统中得到了广泛的应用.在介绍Modbus ASCII通信协议特点的基础上,详述了在LabVIEW软件平台上基于Modbus ASCII通信协议的上位机与下位机主从式串行通信的实现.
【总页数】4页(P31-33,38)
【作者】王水鱼;李宁
【作者单位】西安理工大学,自动化与信息工程学院,陕西,西安,710048;西安理工大学,自动化与信息工程学院,陕西,西安,710048
【正文语种】中文
【中图分类】TP311;TM561
【相关文献】
1.基于MODBUS协议的单片机与S7-200PLC串行通信的实现 [J], 张洁;马凤铭;徐颖
2.基于MODBUS协议的串行通信的设计与实现 [J], 周光宇;高为民;贺卫红
3.基于MODBUS ASCII协议的变频器远程监控系统设计与实现 [J], 徐成杰;朱全银;王红华
4.基于Modbus TCP协议实现PC机与PLC的串行通信 [J], 邬书金; 万频; 何吉越; 胡健; 宓超
5.基于Labview的Modbus通信协议串口上位机的实现 [J], 徐梦阳;李昂;赵峰因版权原因,仅展示原文概要,查看原文内容请购买。
(1) Modbus是由Modicon(现为施耐德电气公司的一个品牌)在1979年发明的,是全球第一个真正用于工业现场的总线协议。
在NI的产品中,Modbus主要用于实现PLC的通信。
LabVIEW和PLC通信最简单的方式有两种:Modbus 或者 NI OPC Server. 前者需要PLC安装Modbus 模块;后者需要对特定PLC设备支持才能保证正常连接,网址为OPC Server支持的设备列表。
在实现方面,Modbus实现方式的物理接口有以太网与串口两种,在LabVIEW编程中也得到了体现。
(2) 需要安装LabVIEW Datalogging and Supervisory Control Module,NI官方网站上现在只能搜索到DSC-2011以及 Module的下载,客户可以点击下载后,将下载地址最后改为2010即可下载2010版本。
(3) Modbus地址为包含数据类型和偏移量的6个字符的数值。
左边两个字符决定数据类型,右边四个字符是该数据类型中的序号。
客户所描述的40001~4xxxx是美国modicon公司和ge公司plc使用的Modbus地址,它是基于1的地址,即同类元件的首地址为1。
西门子plc的Modbus地址是基于0的地址。
美国的Modbus地址左起第2位用来表示元件的类型,例如的Modbus地址为010001。
因为数据类型已经包含在功能码中了,西门子的的Modbus 地址实际上为000000,的Modbus地址为000016(或十六进制数16#0010),而不是010017。
某些时候,Modbus地址的后4位被标记为偏置。
这时,可能在第一位和第二位之间添0致使5位地址变为6位。
比如,如果您的用户手册上建议您使用地址40001和某个寄存器通信,你可以在LabVIEW DSC或者在Modbus I/O服务器上使用400001来与之通信。
(4) 首先是如何创建Modbus I/O Server步骤如下:首先,新建一个工程,命名为”Modbus Server”。
基于LabVIEW和modbus的数字表头通信
基于LabVIEW和modbus的数字表头通信
曹彪;薛海英;李有池;
【期刊名称】《集成电路通讯》
【年(卷),期】2015(000)004
【摘要】数字表头通信功能主要由待测模块、数字电流(电压)表头、RS232-RS485转换器、PC机四部分硬件组成。
以PC机作为上位机,通过LabVIEW 软件进行编程,利用RS232转RS485串口,开发出基于modbus协议的串口通讯模块,实现PC机与数字电流(电压)表头通信,解决了对特定待测模块进行自动测试的问题。
【总页数】4页(P.6-9)
【关键词】LabVIEW modbus协议 RS485-RS232
【作者】曹彪;薛海英;李有池;
【作者单位】中国兵器工业第214研究所,苏州215163;;;
【正文语种】英文
【中图分类】TN915.04
【相关文献】
1.基于VC的Modbus协议通信测试软件的实现——Modbus串口通信与Modbus/TCP通信 [J], 白焰; 钟艳辉; 秦宇飞
/doc/d7*******.html,bVIEW与基于Modbus协议的温度控制器通信研究 [J], 崔阳
/doc/d7*******.html,bVIEW与S7-1200系列PLC基于Modbus TCP/IP协议的通信方法[J], 罗光耀; 张龙刚; 俞瑞昕
4.基于LabVIEW与Modbus通信协议的煤矿通风机性能监测系统[J], 朱伟伟;。