802D SL距离码光栅尺的调试
- 格式:docx
- 大小:21.37 KB
- 文档页数:2


距离码光栅尺参数设定说明(1)柔性齿轮比的设定No.2084、No.2085的计算,对于使用模拟信号(1Vpp)输出的光栅尺,柔性齿轮比按照以下的计算方法:目前贵厂在调的轧辊车,X轴使用的光栅尺型号为MOP-42,FAGOR光栅尺说明书如下:X轴光栅尺的信号周期为20um,因此柔性齿轮比(N/M)=20/512/1=20/512=5/128Z轴使用的光栅尺型号为LOP-64,FAGOR光栅尺说明书如下:Z轴光栅尺的信号周期为40um,因此柔性齿轮比(N/M)=40/512/1=40/512=10/128(2)位置脉冲数的计算No.2024 电机每转动1周时,从分离式检测器反馈的脉冲数。
X轴采用丝杠传动,减速比为1/4,丝杠螺距为8mm,电机每转一圈,工作台移动2mm:位置脉冲数=2mm/(20um/512)=51200(>32767),因此采用No.2024和No.2185的乘积设定位置脉冲数。
可进行如下的设定No.2024=25600 No.2185=2。
Z轴采用齿轮齿条传动,减速比为3249/416075,您提供的另一个参数为384.266mm,电机每转动一圈,工作台的移动距离为384.266*(3249/416075)约等于3mm,现在以3mm计算:位置脉冲数=3mm/(40um/512)=38400(>32767),因此采用No.2024和No.2185的乘积设定位置脉冲数。
可进行如下的设定No.2024=19200 No.2185=2。
(3)参考计数器容量的计算No.1821和No.1882的设定:X轴使用的光栅尺型号为MOP-42,FAGOR光栅尺说明书如下:No.1821=20000 No.1882=20020Z轴使用的光栅尺型号为LOP-64,FAGOR光栅尺说明书如下:No.1821=80000 No.1882=80040(4)其他参数的设定No.1815#1=1 使用分离式检测器No.1815#2=1 使用带有绝对寻址标记的标尺(距离码光栅尺)。

一系统参数后台:Alt+N或者shift+报警键1、通用数据10000【0】V1(定义机床坐标轴的名称)10000【1】B1(同上)10000【2-5】自由轴的名称(无定义轴的名称X1、Y1、A1、B1、SP等等)11310 手轮反向11346 手轮脉冲移动实际距离2、通道机床参数20050【0-2】0(定义通道内的几何轴)20060【0-2】0(同上)20070【0】1(通道内有效的机床轴号)20070【1】2(同上)20070【2-4】0(同上)20080【0】V(通道内有效的机床轴名)20080【1】B(同上)20080【2-4】0(同上)20700 0(未回参考点NC启动停止为1)3、轴参数通过“轴+”“轴-”更换轴,使用的同性质轴同时更改30100【5】1(模拟给定输出到轴控接口)30110【1】1-驱动器号对于V1轴(定义速度给定端口)30110【2】2-驱动器号对于B1轴(同上)30130【0】1(给定值输出类型,同时更改)30200 1(编码器数量)30220 同30110,实际值:驱动器号(定义位置反馈接口)30240 1-实际值(编码器反馈类型,同时更改,1-相对编码器/2-仿真轴/4-绝对编码器)30300 1(定义“回转轴”对于B1)30310 0(回转轴取模转换,对于B1)30320 1(取模360度位置显示,1为有效,对于B1)31020 2048(每转的编码器线数,对于B1)31030 360(蜗杆螺距,对于B1)31050【0】1(减速箱丝杠端齿轮齿数)31060【0】5(减速箱电机端齿轮齿数)32000 3000(最大轴速度,同时更改)32010 2500(点动方式快速速度)32100 电机转向(1/-1)32110 反馈极性(1/-1)32450 反向间隙补偿,回参考点后补偿生效(单位mm)36100 负方向软限位(单位mm,一般为负值)36110 正方向软限位(单位mm,一般为正值)设定主轴步骤如下:30300 1-定义为主轴(0-坐标轴/1-主轴)30310 1-回转轴取模转换30320 1-取模360度位置显示(1-有效/0-无效)35000 1-定义机床轴为主轴35100 实际值(最高主轴转速)35110【0-5】主轴各档最高转速35120【0-5】主轴各档最低转速35130【0-5】主轴各档最高转速限制35140【0-5】主轴各档最低转速限制36200【0-5】各档速度监控的门限值带直接编码器的模拟量主轴30110 1-给定值模块号30220 1-编码器模块号30230 2-编码器信号端口号31000 实际值(0-编码器/1-光栅尺)31010 实际值(光栅尺节点距离)31020 实际值(编码器没转脉冲数)31040 1-直接测量系统32110 实际值(反馈记性:1/-1)NCK复位上电二驱动调试见手册14510【16】1H(用户数据)14512【18】8H(用户数据)。
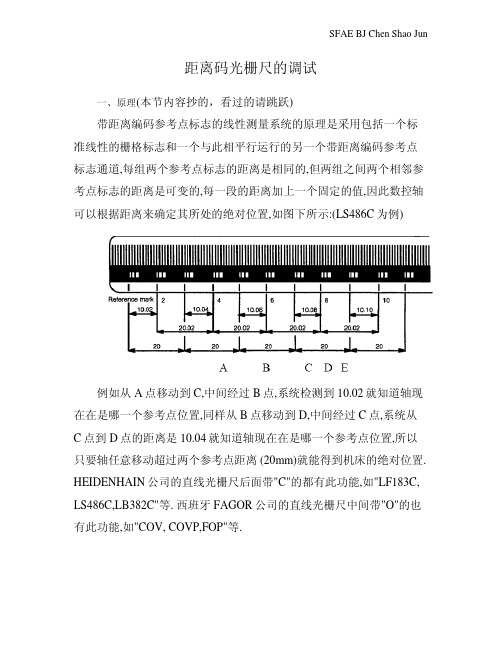
距离码光栅尺的调试一、原理(本节内容抄的,看过的请跳跃)带距离编码参考点标志的线性测量系统的原理是采用包括一个标准线性的栅格标志和一个与此相平行运行的另一个带距离编码参考点标志通道,每组两个参考点标志的距离是相同的,但两组之间两个相邻参考点标志的距离是可变的,每一段的距离加上一个固定的值,因此数控轴可以根据距离来确定其所处的绝对位置,如图下所示:(LS486C为例)例如从A点移动到C,中间经过B点,系统检测到10.02就知道轴现在在是哪一个参考点位置,同样从B点移动到D,中间经过C点,系统从C点到D点的距离是10.04就知道轴现在在是哪一个参考点位置,所以只要轴任意移动超过两个参考点距离 (20mm)就能得到机床的绝对位置. HEIDENHAIN公司的直线光栅尺后面带"C"的都有此功能,如"LF183C, LS486C,LB382C"等. 西班牙FAGOR公司的直线光栅尺中间带"O"的也有此功能,如"COV, COVP,FOP"等.二、调试相关参数:MD30200=2MD30240=2 (编码器类型:1.增量式;2.距离码;4.绝对值)MD31000=1 (0:编码器;1:光栅尺)MD31010=0.02 (光栅尺节点距离)MD31040=1 (直接测量系统)MD34200=3 (回零模式)MD34300=20 (标准参考点标志栅格间距)MD34060=40 (返参考点最大移动距离=2*栅格间距)MD34000=0 (使用凸轮)MD34040=1000 (返参考点速度)MD34310=0.02 (栅距)还包括MD34090(返参考点偏移值)和MD34320(返参考点极性)。
以及驱动数据:P407,P424,P426。
对大部分光栅尺,其栅距都是20um,通过驱动配置用以上数据可以完成调试。
三、案例用户现场使用的是意大利的GIVI Misure光栅尺,栅距20um。
802D sl 进给轴的第三编码器调试/Startup of the third encoder前言: 对于模拟主轴的直接编码器,我们在应用时需要把它叠加到一个进给轴上。
通常的使用方法,是我们把它配置为一个进给轴的第二编码器,在使用时主轴从这个进给轴的第二编码器读取数据。
但当设备所有轴都为全闭环时,就没有第二编码器可为模拟主轴使用。
所以我们在这里介绍进给轴第三编码器调试的方法。
调试目标:实现第三编码器功能 ——在X 轴上配置3个编码器,其中第三编码器作为模拟主轴的直接编码器 调试设备: 试验设备 数量 详细信息PG1 WinXP Pro; with Stater4.1802D SL PCU2101系统版本: 1.4.1 Toolbox : 1.4 车床版电源模块 1 非调节型电源模块 (SLM) 电机模块 1 双轴模块 电机 2 1FK7同步电机外接编码器 2 Sin/Cos 2048 SMC20 2注:用两个同步电机作为X ,Y 轴,两个外接编码器作为X 轴的第二、三编码器。
步 骤:1、 如下图示对硬件连线:2、通过HMI,对驱动执行”SINAMICS IBN”调试。
在调试完成后,HMI上会出现”Alarm1331: Topology:Component not assigned to a drive object, Component no.for the encoder interface”。
此属正常情况,用Starter将编码器分配到各轴后会消除。
3、用STARTER 上载驱动项目,保存后离线。
观察拓扑结构中的元件连接,记住系统自动赋予各编码器的元件号。
例”encoder_2(5)”。
4、选择目录树”Drives”中的”SERVO_03”,点击Configuration。
然后在右侧画面中点击”Configure DDS…”。
在弹出的界面中,通过点击”Continue>”到电机选择界面选择正确的电机(如果是带DriveCliq接口的电机,系统会自动识别),继续“下一步”到”Encoder”画面下,去掉已有的Encoder2 。
802D SL 安装与调试内容提要本文通过对SIEMENS 802D SL 数控系统的安装与调试将使我们更加了解其工作原理,熟悉SIEMENS系统的性能。
本文首先对802Dsl数控系统、802Dsl伺服驱动模块及电机的硬件结构作了认识,对其各个接口的功能有了初步了解,对802D- sl数控系统有了一个整体的认识。
结合802Dsl 安装调试、802Dsl功能说明、802Dsl伺服驱动模块说明、802Dsl操作编程等说明资料对系统的元件及安装调试进行了初步的介绍。
其中对各元件名称、用途,已经系统的安装、调试以及一些注意事项都有提及。
关键词:数控系统用户报警故障诊断回参考点第一节:数控机床的组成1.数控机床的组成:数控机床组成示意图(1)输入输出装置:设备主要实现编制程序、输入程序、输入数据以及显示、存储和打印等功能。
组成:按钮站/状态灯/按键阵列/显示器。
(2)数控系统数控系统是数控机床的“大脑”和“核心”,通常由一台通用或专用计算机构成。
组成:计算机系统、位置控制板、PLC接口板,通讯接口板、特殊功能模块以及相应的控制软件。
(3)伺服系统伺服驱动系统由伺服控制电路、功率放大电路和伺服电动机组成。
伺服驱动的作用,是把来自数控装置的位置控制移动指令转变成机床工作部件的运动,使工作台按规定轨迹移动或精确定位,加工出符合图样要求的工件,即把数控装置送来的微弱指令信号,放大成能驱动伺动电动机的大功率信号。
(4)辅助装置指数控机床的一些必要的配套部件,用以保证数控机床的运行,如冷却、排屑、润滑、照明、监测等。
它包括液压和气动装置、排屑装置、交换工作台、数控转台和数控分度头,还包括刀具及监控检测装置等。
(5)机床本体数控机床的机械部件包括:主运动部件,进给运动执行部件,如工作台、拖板及其传动部件,床身、立柱等支承部件;此外,还有冷却、润滑、转位和夹紧等辅助装置。
与传统机床相比,数控机床的外部造型、整体布局、传动系统与刀具系统的部件结构以及操作机构等都发生了很大的变化,这种变化的目的是为了满足数控技术的要求和充分发挥数控机床的特点。
【经验】802D SL距离码光栅尺的调试
5
分类:数控电气丨评论:暂无评论丨浏览:188 浏览数丨字体:大中小
一.检查硬件连接
检查24V电源是否准备好,检查DRIVE CLiQ电缆和光栅尺电缆是否已连接好。
二.光栅尺配置
1. 将电脑连接好,打开STARTER 软件,选择[options]­ ——[set PG/PC interface],在接口设定画面选择IP协议:“S7ONLINE[STEP7] —>网卡型号”
2. 新建一个项目,双击“Insert single drive unit”,做如下配置:
Device type : SINAMICS IN 802D
Device Version : 2.4x
Address type : IP
Bus addr : 169.254.11.22
3. 项目创建后,STARTER和PC建立在线连接,将项目802D SL传到PC 上,然后下线开始配置。
(注:在点下线图标后,出现一对话框,把“Load changes To PG”选择上)这样,在802D SL系统中的拓
扑结构就已经下到PG上,可以开始测量系统的配置了。
4. (在做此步骤时,要确保最后一个伺服模块的第二编码器已经被打掉)选择要配置的伺服轴
(比如:SERVO_04 Z轴),单击前面的“+”,双击“Configuration”,单击“Configure DDS…”,
选择“Continue”,直至编码器选择画面,激活第二编码器,选择自定义编码器,
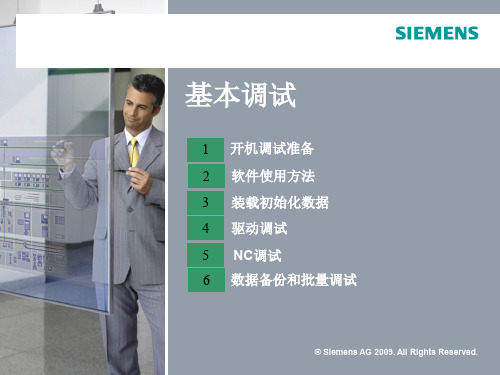
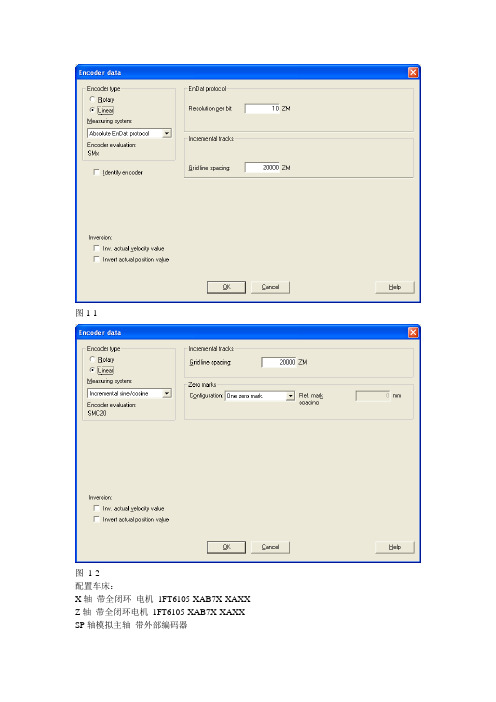
选择“Encoder data”,做如下配置:
Encoder type : Linear
Measuring system : Incremental sine/cosine
Grid type : 40000ZM(根据光栅尺类型填写“栅格间距”)
Zero marks Configuration : distant code zero mark
Equidistant Zero mark spacing : 80mm(根据光栅尺类型填写“零标记间距”)点击OK ,选择“Continue ”完成配置。
在结束配置时,可能会出现报警页面,选择“Cancel”,“Yes”,直至报警取消。
5. 根据实际情况修改拓扑结构,将新生成的测量系统拖至正确位置。
6. 将项目存盘,在线,(按下急停按钮)将项目传入系统。
此时,**C20绿灯亮,表明下传
的拓扑与机床实际拓扑一致。
下大电再上电,光栅尺配置完成。
三.NC参数设置
MD30230 = 2 //编码器个数
MD30240 = 2 //编码器反馈类型(1:增量2:距离码 4:绝对值) MD31000 = 1 //(0:编码器1:光栅尺)
MD31010 = 0.04mm //光栅尺节点距离
MD31040 = 1 //是否是直接测量系统
MD32110 = -1 //反馈极性1/-1
四、距离码光栅尺回参考点参数设置
MD34200 = 3 //参考点模式
MD34300 = 80mm //标准参考点标志栅格间距(LB382C 为80mm)MD34060 = 160mm //返回参考点最大移动距离=2倍标准参考点标志栅格间距
MD34000 = 0 //是否使用参考点凸轮(0:不使用1:使用)
MD34040 = 1000mm/s //返参考点速度
MD34090 返回参考点偏移值。
MD34320 返回参考点极性
配置光栅尺的相关参数:
1.绝对值光栅尺:
MD30230=2;编码器个数
MD30240=4;编码器反馈类型(绝对值)
MD31000=1;编码器0/光栅尺1
MD31040=1;是否直接测量0/1
MD32110=-1;反馈极性1/-1
MD34200=0;参考点返回模式(绝对值)
2.距离码光栅尺:
MD30230=2;编码器个数
MD30240=2;编码器反馈类型(距离码)
MD31000=1;编码器0/光栅尺1
MD31040=1;是否直接测量0/1
MD32110=-1;反馈极性1/-1
MD34200=3;参考点返回模式(距离码)
屏蔽光栅尺的相关参数:
1.绝对值光栅尺:
MD30230=1;编码器个数
MD31000=0;编码器0/光栅尺1
MD31040=0;是否直接测量0/1
2.距离码光栅尺:
MD30230=1;
MD30240=4;
MD31000=0;
MD31040=0;
MD32110=1;
MD34200=0;。