系统镇定
- 格式:ppt
- 大小:201.00 KB
- 文档页数:15
《现代控制理论》MOOC课程5.3系统镇定问题一.状态反馈的镇定问题确定状态反馈控制u =−Kx +v ,使得所导出的状态反馈闭环系统x =A −BK x +Bv是渐近稳定的,也即闭环系统的特征值均有负的实部,则称系统实现了状态反馈镇定。
镇定是极点配置的一类特殊情况,它要求将极点配置到根平面的左半平面。
二. 状态反馈可镇定的条件可通过状态反馈u =−Kx +v 实现镇定的充要条件是其不能控子系统是渐近稳定的。
定理:线性定常系统x =A x +B u ,x 0=0,t ≥0y =Cx5.3系统镇定问题给定n 阶线性定常受控系统:x =A x +B u ,x 0=0,t ≥0y =Cx证明:设线性定常系统为不完全能控,故存在非奇异线性变换R C 对系统进行能控性分解且对任一状态反馈矩阵K =k 1k 2可导出෩K=KR c =෩k 1෩k2,由于{෩Ac ,෩B c }为能控,故必存在෩k 1使(෩A c −෩B c ෩k 1)的特征值具有负的实部,即存在K 使能因此,系统由状态反馈实现镇定的充要条件为不能控子系统的特征值均具有负实部。
得证=detλI −෩Ac +෩B c ෩k 1−෩A 12+෩B c ෩k 20λI −෩A തc det λI −A −BK=det[λI −R C −1A −BK R C ]于是有:=det λI −෩A c +෩B c ෩k 1det(λI −෩A തc )෩A =R C −1AR c =෩A c ෩A 120෩A തc ෩B=R C −1B=෩B c 0而导出:控子系统的特征值均具有负的实部。
三. 状态反馈镇定的算法算法给定不完全能控系统x=A x+B u,且知其满足可镇定的条件,则镇定问题中反馈矩阵K的计算步骤如下:1. 对给定系统进行能控性分解,导出能控子系统{෩A c,෩B c},能控性分解的变换阵为R C;2.应用非奇异线性变换阵T C1,将能控子系统{෩A c,෩B c}化为能控标准I型{ഥA c,ഥB c};3.应用极点配置算法,计算反馈增益阵ഥK使能控子系统的特征值具有负的实部;4.计算状态反馈矩阵K=k10;K=k10=ഥk1T C1−10R C−15.3系统镇定问题判别其是否为可镇定的,若是可镇定的,试求一状态反馈K ,使闭环系统为渐近稳定。

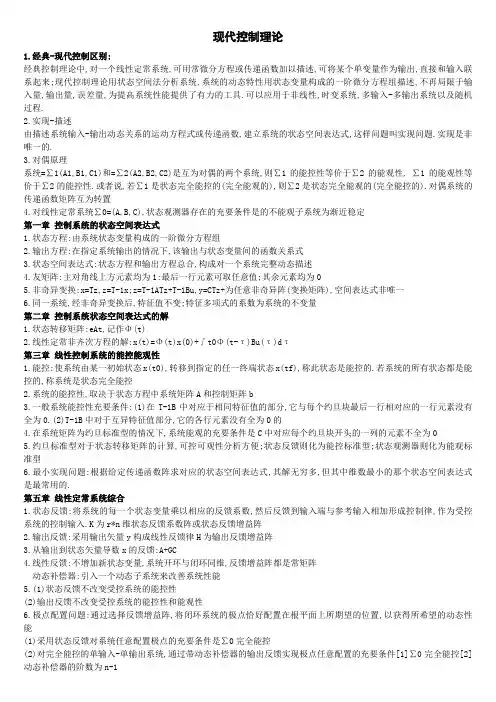
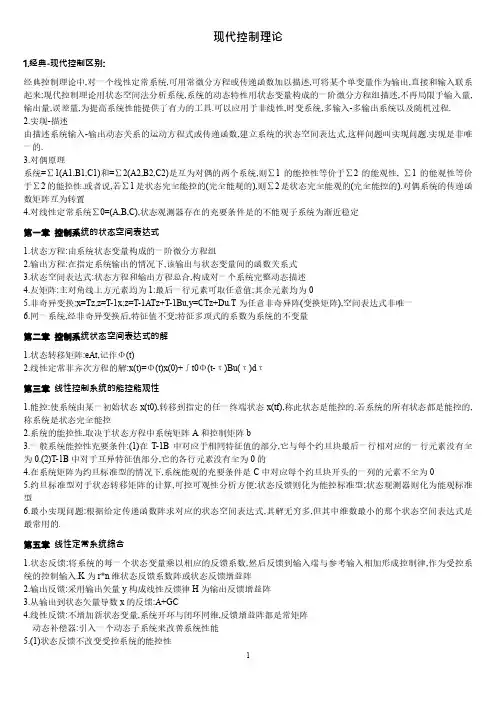
现代控制理论1.经典-现代控制区别:经典控制理论中,对一个线性定常系统,可用常微分方程或传递函数加以描述,可将某个单变量作为输出,直接和输入联系起来;现代控制理论用状态空间法分析系统,系统的动态特性用状态变量构成的一阶微分方程组描述,不再局限于输入量,输出量,误差量,为提高系统性能提供了有力的工具.可以应用于非线性,时变系统,多输入-多输出系统以及随机过程.2.实现-描述由描述系统输入-输出动态关系的运动方程式或传递函数,建立系统的状态空间表达式,这样问题叫实现问题.实现是非唯一的.3.对偶原理系统=∑1(A1,B1,C1)和=∑2(A2,B2,C2)是互为对偶的两个系统,则∑1的能控性等价于∑2的能观性, ∑1的能观性等价于∑2的能控性.或者说,若∑1是状态完全能控的(完全能观的),则∑2是状态完全能观的(完全能控的).对偶系统的传递函数矩阵互为转置4.对线性定常系统∑0=(A,B,C),状态观测器存在的充要条件是的不能观子系统为渐近稳定第一章控制系统的状态空间表达式1.状态方程:由系统状态变量构成的一阶微分方程组2.输出方程:在指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态方程和输出方程总合,构成对一个系统完整动态描述4.友矩阵:主对角线上方元素均为1:最后一行元素可取任意值;其余元素均为05.非奇异变换:x=Tz,z=T-1x;z=T-1ATz+T-1Bu,y=CTz+为任意非奇异阵(变换矩阵),空间表达式非唯一6.同一系统,经非奇异变换后,特征值不变;特征多项式的系数为系统的不变量第二章控制系统状态空间表达式的解1.状态转移矩阵:eAt,记作Φ(t)2.线性定常非齐次方程的解:x(t)=Φ(t)x(0)+∫t0Φ(t-τ)Bu(τ)dτ第三章线性控制系统的能控能观性1.能控:使系统由某一初始状态x(t0),转移到指定的任一终端状态x(tf),称此状态是能控的.若系统的所有状态都是能控的,称系统是状态完全能控2.系统的能控性,取决于状态方程中系统矩阵A和控制矩阵b3.一般系统能控性充要条件:(1)在T-1B中对应于相同特征值的部分,它与每个约旦块最后一行相对应的一行元素没有全为0.(2)T-1B中对于互异特征值部分,它的各行元素没有全为0的4.在系统矩阵为约旦标准型的情况下,系统能观的充要条件是C中对应每个约旦块开头的一列的元素不全为05.约旦标准型对于状态转移矩阵的计算,可控可观性分析方便;状态反馈则化为能控标准型;状态观测器则化为能观标准型6.最小实现问题:根据给定传递函数阵求对应的状态空间表达式,其解无穷多,但其中维数最小的那个状态空间表达式是最常用的.第五章线性定常系统综合1.状态反馈:将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入.K为r*n维状态反馈系数阵或状态反馈增益阵2.输出反馈:采用输出矢量y构成线性反馈律H为输出反馈增益阵3.从输出到状态矢量导数x的反馈:A+GC4.线性反馈:不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵动态补偿器:引入一个动态子系统来改善系统性能5.(1)状态反馈不改变受控系统的能控性(2)输出反馈不改变受控系统的能控性和能观性6.极点配置问题:通过选择反馈增益阵,将闭环系统的极点恰好配置在根平面上所期望的位置,以获得所希望的动态性能(1)采用状态反馈对系统任意配置极点的充要条件是∑0完全能控(2)对完全能控的单输入-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件[1]∑0完全能控[2]动态补偿器的阶数为n-1(3)对系统用从输出到x 线性反馈实现闭环极点任意配置充要条件是完全能观7.传递函数没有零极点对消现象,能控能观8.对完全能控的单输入-单输出系统,不能采用输出线性反馈来实现闭环系统极点的任意配置9.系统镇定:保证稳定是控制系统正常工作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定(1)对系统采用状态反馈能镇定的充要条件是其不能控子系统渐近稳定(2)对系统通过输出反馈能镇定的充要条件是其结构分解中的能控且能观子系统是输出反馈能镇定的,其余子系统是渐近稳定的(3)对系统采用输出到x 反馈实现镇定充要条件是其不能观子系统为渐近稳定10.解耦问题:寻求适当的控制规律,使输入输出相互关联的多变量系统的实现每个输出仅受相应的一个输入所控制,每个输入也仅能控制相应的一个输出11.系统解耦方法:前馈补偿器解耦和状态反馈解耦12.全维观测器:维数和受控系统维数相同的观测器现代控制理论试题1 ①已知系统u u u y y 222++=+&&&&&&&,试求其状态空间最小实现。
![线性系统的镇定问题_线性系统理论与设计_[共2页]](https://uimg.taocdn.com/0e7bf0b148d7c1c708a145f3.webp)
现代控制理论1.经典-现代控制区别:经典控制理论中,对一个线性定常系统,可用常微分方程或传递函数加以描述,可将某个单变量作为输出,直接和输入联系起来;现代控制理论用状态空间法分析系统,系统的动态特性用状态变量构成的一阶微分方程组描述,不再局限于输入量,输出量,误差量,为提高系统性能提供了有力的工具.可以应用于非线性,时变系统,多输入-多输出系统以及随机过程.2.实现-描述由描述系统输入-输出动态关系的运动方程式或传递函数,建立系统的状态空间表达式,这样问题叫实现问题.实现是非唯一的.3.对偶原理系统=∑1(A1,B1,C1)和=∑2(A2,B2,C2)是互为对偶的两个系统,则∑1的能控性等价于∑2的能观性, ∑1的能观性等价于∑2的能控性.或者说,若∑1是状态完全能控的(完全能观的),则∑2是状态完全能观的(完全能控的).对偶系统的传递函数矩阵互为转置4.对线性定常系统∑0=(A,B,C),状态观测器存在的充要条件是的不能观子系统为渐近稳定第一章控制系统的状态空间表达式1.状态方程:由系统状态变量构成的一阶微分方程组2.输出方程:在指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态方程和输出方程总合,构成对一个系统完整动态描述4.友矩阵:主对角线上方元素均为1:最后一行元素可取任意值;其余元素均为05.非奇异变换:x=Tz,z=T-1x;z=T-1A Tz+T-1Bu,y=CTz+Du.T为任意非奇异阵(变换矩阵),空间表达式非唯一6.同一系统,经非奇异变换后,特征值不变;特征多项式的系数为系统的不变量第二章控制系统状态空间表达式的解1.状态转移矩阵:eAt,记作Φ(t)2.线性定常非齐次方程的解:x(t)=Φ(t)x(0)+∫t0Φ(t-τ)Bu(τ)dτ第三章线性控制系统的能控能观性1.能控:使系统由某一初始状态x(t0),转移到指定的任一终端状态x(tf),称此状态是能控的.若系统的所有状态都是能控的,称系统是状态完全能控2.系统的能控性,取决于状态方程中系统矩阵A和控制矩阵b3.一般系统能控性充要条件:(1)在T-1B中对应于相同特征值的部分,它与每个约旦块最后一行相对应的一行元素没有全为0.(2)T-1B中对于互异特征值部分,它的各行元素没有全为0的4.在系统矩阵为约旦标准型的情况下,系统能观的充要条件是C中对应每个约旦块开头的一列的元素不全为05.约旦标准型对于状态转移矩阵的计算,可控可观性分析方便;状态反馈则化为能控标准型;状态观测器则化为能观标准型6.最小实现问题:根据给定传递函数阵求对应的状态空间表达式,其解无穷多,但其中维数最小的那个状态空间表达式是最常用的.第五章线性定常系统综合1.状态反馈:将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入.K为r*n维状态反馈系数阵或状态反馈增益阵2.输出反馈:采用输出矢量y构成线性反馈律H为输出反馈增益阵3.从输出到状态矢量导数x的反馈:A+GC4.线性反馈:不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵动态补偿器:引入一个动态子系统来改善系统性能5.(1)状态反馈不改变受控系统的能控性(2)输出反馈不改变受控系统的能控性和能观性6.极点配置问题:通过选择反馈增益阵,将闭环系统的极点恰好配置在根平面上所期望的位置,以获得所希望的动态性能(1)采用状态反馈对系统任意配置极点的充要条件是∑0完全能控(2)对完全能控的单输入-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件[1]∑0完全能控[2]动态补偿器的阶数为n-1(3)对系统用从输出到x 线性反馈实现闭环极点任意配置充要条件是完全能观7.传递函数没有零极点对消现象,能控能观8.对完全能控的单输入-单输出系统,不能采用输出线性反馈来实现闭环系统极点的任意配置9.系统镇定:保证稳定是控制系统正常工作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定(1)对系统采用状态反馈能镇定的充要条件是其不能控子系统渐近稳定(2)对系统通过输出反馈能镇定的充要条件是其结构分解中的能控且能观子系统是输出反馈能镇定的,其余子系统是渐近稳定的(3)对系统采用输出到x 反馈实现镇定充要条件是其不能观子系统为渐近稳定10.解耦问题:寻求适当的控制规律,使输入输出相互关联的多变量系统的实现每个输出仅受相应的一个输入所控制,每个输入也仅能控制相应的一个输出11.系统解耦方法:前馈补偿器解耦和状态反馈解耦12.全维观测器:维数和受控系统维数相同的观测器现代控制理论试题1 ①已知系统u u u y y 222++=+ ,试求其状态空间最小实现。
1、什么是对偶系统,从传递函数矩阵,特征多项式和能控、能观性说明互为对偶的两个系统之间的关系。
答:定义:如果两个系统满足A2=A1T,B2=C1T,C2=B1T,则称这两个系统互为对偶函数.互为对偶系统传递函数矩阵互为转置特征多项式相同,一个函数的能控性等价于另一个函数的能观性。
2、什么是状态观测器?简述构造状态观测器的原则。
答:系统的状态不易检测,以原系统的输入和输出为输入量构造,一动态系统,使其输出渐近于原系统状态,此动态系统为原系统的状态观测器。
原则:(1)观测器应以原系统的输入和输出为输入量;(2)原系统完全能观或不能观于系统是渐近稳定的;(3)观测器的输出状态应以足够快速度超近于原系统状态;(4)有尽可能低的维数,以便于物理实现。
3、说明应用李氏第二法判断非线性系统稳定性基本思想和方法步骤和局限性。
答:基本思想:从能量观点分析平衡状态的稳定性。
(1)如果系统受扰后,其运动总是伴随能量的减少,当达到平衡状态时,能量达到最小值,则此平衡状态渐近稳定:(2)如果系统不断从外界吸收能量,储能越来越大,那么这个平衡状态就是不稳定的:(3)如果系统的储能既不增加也不消耗,那么这个平衡状态时李亚普诺夫意义下的稳定.方法步骤:定义一个正定的标量函数V(x)作为虚构的广义能量函数,然后根据V(x)=dV(x)/dt的符号特征来判别系统的稳定性。
局限性:李雅普诺夫函数V(x)的选取需要一定的经验和技巧.4、举例说明系统状态稳定和输出稳定的关系。
答:关系:(1)状态稳定一定输出稳定,但输出稳定不一定状态稳定;(2)系统状态完全能观且能控=状态稳定与输出稳定等价。
举例:A的特征值=—1 =1 所以状态不是渐进稳点的,W(s)的极点S=—1,所以输出稳点。
5、什么是实现问题?什么是最小实现?说明实现存在的条件.答:(1)由系统的运动方程或传递函数建立SS表达式的问题叫做实现问题;(2)维数最小的实现方式时最小实现;(3)存在条件是m小于等于n.6、从反馈属性、功能和工程实现说明状态反馈和输出反馈的优缺点。
基于全维状态观测器重构状态反馈的倒立摆控制系统镇定设计
湖南科技大学
学院:潇湘学院
专业:电气工程及其自动化
班级:电气三班
姓名:**
学号: **********
1.引言:
2.系统设计及描述:一:摆杆受力分析
二:摆的垂直方向:三:摆的水平方向:四:小车的受力分析:
3.系统特性分析:一:系统稳定性分析
二:系统能控.能观性分析1.能控性分析
4.倒立摆控制器设计:一.倒立摆PID控制器分析
5.设计结果仿真:
参考文献
俞立.鲁棒控制---线性矩阵不等式.北京:清华大学出版社,2002
阳武较.基于MATLAB的一阶倒立摆控制系统的建模与仿真。
南华大学电气工程学院.2007.
薛安克.王俊宏.柴利.王惠娇.倒立摆控制仿真与试验研究现状.杭州电子工业学智能信息与控制技术研究所,2005.
李虹,熊诗波,孙志毅.Simulink环境下倒立摆控制系统建模与仿真【J】.太原科技大学学报,2005,(03).
曾志新,邹海明,李伟光,周建辉,倒立摆系统的建模及
MATLAB仿真【J】.新技术工艺,2005,(10).。
现代控制理论1.经典-现代控制区别:经典控制理论中,对一个线性定常系统,可用常微分方程或传递函数加以描述,可将某个单变量作为输出,直接和输入联系起来;现代控制理论用状态空间法分析系统,系统的动态特性用状态变量构成的一阶微分方程组描述,不再局限于输入量,输出量,误差量,为提高系统性能提供了有力的工具.可以应用于非线性,时变系统,多输入-多输出系统以及随机过程.2.实现-描述由描述系统输入-输出动态关系的运动方程式或传递函数,建立系统的状态空间表达式,这样问题叫实现问题.实现是非唯一的.3.对偶原理系统=∑1(A1,B1,C1)和=∑2(A2,B2,C2)是互为对偶的两个系统,则∑1的能控性等价于∑2的能观性, ∑1的能观性等价于∑2的能控性.或者说,若∑1是状态完全能控的(完全能观的),则∑2是状态完全能观的(完全能控的).对偶系统的传递函数矩阵互为转置4.对线性定常系统∑0=(A,B,C),状态观测器存在的充要条件是的不能观子系统为渐近稳定第一章控制系统的状态空间表达式1.状态方程:由系统状态变量构成的一阶微分方程组2.输出方程:在指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态方程和输出方程总合,构成对一个系统完整动态描述4.友矩阵:主对角线上方元素均为1:最后一行元素可取任意值;其余元素均为05.非奇异变换:x=Tz,z=T-1x;z=T-1ATz+T-1Bu,y=CTz+Du.T为任意非奇异阵(变换矩阵),空间表达式非唯一6.同一系统,经非奇异变换后,特征值不变;特征多项式的系数为系统的不变量第二章控制系统状态空间表达式的解1.状态转移矩阵:eAt,记作Φ(t)2.线性定常非齐次方程的解:x(t)=Φ(t)x(0)+∫t0Φ(t-τ)Bu(τ)dτ第三章线性控制系统的能控能观性1.能控:使系统由某一初始状态x(t0),转移到指定的任一终端状态x(tf),称此状态是能控的.若系统的所有状态都是能控的,称系统是状态完全能控2.系统的能控性,取决于状态方程中系统矩阵A和控制矩阵b3.一般系统能控性充要条件:(1)在T-1B中对应于相同特征值的部分,它与每个约旦块最后一行相对应的一行元素没有全为0.(2)T-1B中对于互异特征值部分,它的各行元素没有全为0的4.在系统矩阵为约旦标准型的情况下,系统能观的充要条件是C中对应每个约旦块开头的一列的元素不全为05.约旦标准型对于状态转移矩阵的计算,可控可观性分析方便;状态反馈则化为能控标准型;状态观测器则化为能观标准型6.最小实现问题:根据给定传递函数阵求对应的状态空间表达式,其解无穷多,但其中维数最小的那个状态空间表达式是最常用的.第五章线性定常系统综合1.状态反馈:将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入.K为r*n维状态反馈系数阵或状态反馈增益阵2.输出反馈:采用输出矢量y构成线性反馈律H为输出反馈增益阵3.从输出到状态矢量导数x的反馈:A+GC4.线性反馈:不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵动态补偿器:引入一个动态子系统来改善系统性能5.(1)状态反馈不改变受控系统的能控性(2)输出反馈不改变受控系统的能控性和能观性6.极点配置问题:通过选择反馈增益阵,将闭环系统的极点恰好配置在根平面上所期望的位置,以获得所希望的动态性能(1)采用状态反馈对系统任意配置极点的充要条件是∑0完全能控(2)对完全能控的单输入-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件[1]∑0完全能控[2]动态补偿器的阶数为n-1(3)对系统用从输出到x 线性反馈实现闭环极点任意配置充要条件是完全能观7.传递函数没有零极点对消现象,能控能观8.对完全能控的单输入-单输出系统,不能采用输出线性反馈来实现闭环系统极点的任意配置9.系统镇定:保证稳定是控制系统正常工作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定(1)对系统采用状态反馈能镇定的充要条件是其不能控子系统渐近稳定(2)对系统通过输出反馈能镇定的充要条件是其结构分解中的能控且能观子系统是输出反馈能镇定的,其余子系统是渐近稳定的(3)对系统采用输出到x 反馈实现镇定充要条件是其不能观子系统为渐近稳定10.解耦问题:寻求适当的控制规律,使输入输出相互关联的多变量系统的实现每个输出仅受相应的一个输入所控制,每个输入也仅能控制相应的一个输出11.系统解耦方法:前馈补偿器解耦和状态反馈解耦12.全维观测器:维数和受控系统维数相同的观测器现代控制理论试题1 ①已知系统u u uy y 222++=+ ,试求其状态空间最小实现。