浙江工业大学-2017年-硕士研究生考试真题-907机械原理(II)
- 格式:pdf
- 大小:23.95 MB
- 文档页数:5
一、填空题1.平面运动副的最大约束数为____2_____,最小约束数为_____1_____。
2.平面机构中若引入一个高副将带入_____1____个约束,而引入一个低副将带入_____2____个约束。
平面机构中约束数与自由度数的关系是_约束数+自由度数=3_。
3.在机器中,零件是最小制造的单元,构件是最小运动的单元。
4.点或线接触的运动副称为高副,如齿轮副、凸轮副等。
5.机器中的构件可以是单一的零件,也可以是由多个零件装配成的刚性结构。
6.两个构件相互接触形成的具有确定相对运动的一种联接称为运动副。
7.面接触的运动副称为低副,如转动副、移动副等。
8.把两个以上的构件通过运动副的联接而构成的相对可动的系统称为是运动链,若运动链的各构件构成了首末封闭的系统称为闭链,若运动链的构件未构成首末封闭的系统称为开链。
9.平面机构是指组成机构的各个构件均在同一平面内运动。
10.在平面机构中,平面低副提供2个约束,平面高副提供1个约束。
11.机构具有确定运动时所必须给定的独立运动参数的数目称为机构的自由度。
12.机构具有确定运动的条件是机构的原动件数等于自由度数。
二、简答题1.机构具有确定运动的条件是什么?答:1.要有原动件;2.自由度大于0;3.原动件个数等于自由度数。
2.何谓复合铰链、局部自由度和虚约束?在计算机构自由度时应如何处理?答:复合铰链是三个或更多个构件组成两个或更多个共轴线的转动副。
在有些机构中,其某些构件所能产生的局部运动并不影响其他构件的运动,我们把这些构件所能产生的这种局部运动的自由度称为局部自由度。
虚约束是在机构中与其他约束重复而不起限制运动作用的约束。
在计算机构自由度时,K个构件汇交而成的复合铰链应具有(K-1)个转动副,同时应将机构中的局部自由度、虚约束除去不计。
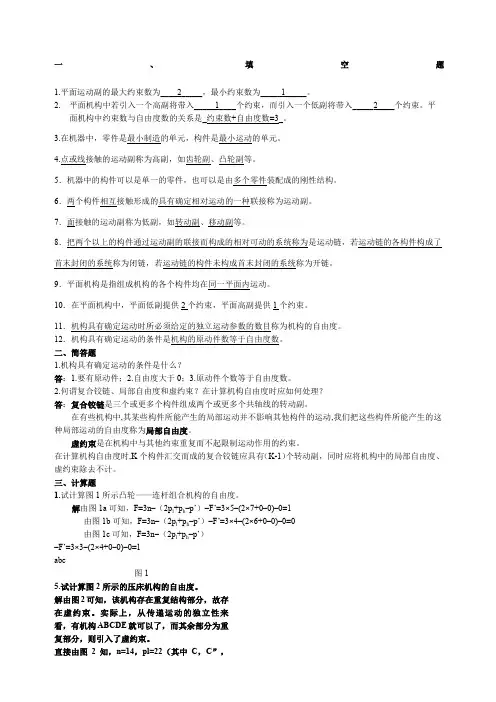
三、计算题1.试计算图1所示凸轮——连杆组合机构的自由度。
解由图1a可知,F=3n–(2p l+p h–p’)–F’=3×5–(2×7+0–0)–0=1由图1b可知,F=3n–(2p l+p h–p’)–F’=3×4–(2×6+0–0)–0=0由图1c可知,F=3n–(2p l+p h–p’)–F’=3×3–(2×4+0–0)–0=1abc图15.试计算图2所示的压床机构的自由度。
![浙江工业大学机械工程学院《911工程热力学(Ⅱ)》[专业硕士]历年考研真题汇编](https://uimg.taocdn.com/19e7847b1fb91a37f111f18583d049649b660eec.webp)
目 录2011年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题2012年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题2013年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题2014年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题2015年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题2016年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题2017年浙江工业大学911工程热力学Ⅱ[专业硕士]考研真题2018年浙江工业大学911工程热力学Ⅱ[专业硕士]考研真题2019年浙江工业大学机械工程学院911工程热力学(Ⅱ)[专业硕士]考研真题2011年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题四,计算题(60分,每题20分)I-有一刚性真空储气踵,体枳为V,现连接于输气管道进行绝热充气到压力平衡,并关闭阀门”已知输气管内气体状态始终保持稳定,其压力为"温度为「Z&T, h=CpT,k=Cp/Cv t试计算充气终了时,容器内气体的温度E及充入气体的质量旗试证明刖性容器绝热放气时,容器内剩余气体经历了一个可逆的绝热膨胀过程。
3,空气流经喷管作等烯流动,已知:pi=0.5MPa,Ti-500^,C t=1115时$,P2=0.lMPa t m=l.5kgZs*试求:H)滞止参数及临界参数和临界流速:(2)出口的状态参数及流速;(3)进、出口及喉部的截面积:U)进'出口截面上的马赫数:<5)将啧管内的流动情况表示在T-s图上.(空气为双原子气体,k=1.4,脂=287.1J/kg*k)(911)工程热力学(II)第2页/共2页2012年浙江工业大学911工程热力学(Ⅱ)[专业硕士]考研真题四.计算题(60分,每题勿分)L 下图给出了一种燃气轮机热电联供循环。
其中空气质量流量仇®,燃料燃烧加入热量。
皿・.循环输出功率P 响,发电功率"供热量Qp 。
所有答案均写在答题纸上,在此答题无效。
机械原理部分(75分)一.选择题(共20分)1. 机械平衡研究的内容是(A) 驱动力与阻力间的平衡(B) 各构件作用力间的平衡(C) 惯性力系的平衡(D) 输入功率与输出功率间的平衡2. 槽数z 4的外啮合槽轮机构,主动销数最多可取。
(A)1 (B)2 (C)3 (D)43.为保证一对渐开线齿轮连续传动,应使实际啮合线长度基圆齿距。
(A)大于等于;(B) 小于等于;(C)小于。
4. 一对外啮合斜齿圆柱齿轮的正确啮合条件是 。
(A)m n1= m n2; (B) αn1=αn2;(C)m n1= m n2,αn1=αn2,β1=-β2;(D)m n1= m n2,αn1=αn2,β1=β2。
5. 增加斜齿轮传动的螺旋角,将引起 。
(A)重合度减小,轴向力增加; (B)重合度减小,轴向力减小; (C )重合度增加,轴向力减小; (D)重合度增加,轴向力增加。
6. 一对渐开线齿轮啮合传动时,两齿廓间 。
(A )保持纯滚动; (B)各处均有相对滑动; (C)除节点外各处均有相对滑动。
7. 凸轮机构中从动件作等加速等减速运动时将产生 冲击。
(A)刚性; (B)柔性; (C)无刚性也无柔性.8. 在曲柄摇杆机构中,当摇杆为主动件,且 处于共线位置时,机构处于死点位置。
(A)曲柄与机架; (B)曲柄与连杆; (C)连杆与摇杆。
9. 在由若干机器串联构成的机组中,若这些机器的单机效率均不相同,其中最高效率和最低效率分别为ηmax 和ηmin ,则机组的总效率η 必有如下关系: 。
(A) ηη<min ; (B)ηη>;max (C) ηηηmin max ≤≤;10. 连杆机构行程速比系数是指从动杆反、正行程 。
(A)瞬时速度的比值(B)最大速度的比值(C)平均速度的比值二.计算图示机构的自由度,并分析组成此机构的基本杆组。
由又如在该机构中改选 EG 为原动件,试问组成此机构的基本杆组是否与前有所不同,为什么?(10分)机架4力驱动滑块3 向上运动。
浙江工业大学考研真题、考研答案及考研资料,由布丁考研网浙工大在读学长收集整理,真题都是来自官方原版,权威可靠,内部资料都是我们当年考浙工大时用的,考上后针对新的大纲重新进行了整理,参考价值极高。
此外,我们还有很多备考浙工大的经验,学弟学妹们有任何报考的疑问均可以咨询我们。
我们还提供一对一VIP辅导,除了传授报考浙江工业大学的内部信息、备考方法及经验外,把专业课的所有重点、难点、考点全部道出,在最短的时间内快速提升成绩,特别适合二战、在职、本科不是985和211、基础比较差的同学。
2017浙江工业大学硕士研究生招生专业目录(学术型)
浙江工业大学考研真题,由布丁考研网在读学长提供。
因为专注,所以专业。
布丁考研网,在读学长提供考研专业课资料及辅导,真实可靠,保证高参考价值。

本套资料合用专业085201机械工程(专业学位)080200机械工程机械工程(学术学位)085236工业工程(专业学位)浙江工业大学814/908 微机原理考研复习全书第一章浙江工业大学 814/908 微机原理考试纲领第二章浙江工业大学 814/908 微机原理考研真题2006 年浙江工业大学814/908 微机原理考研真题2007年浙江工业大学814/908 微机原理考研真题2008年浙江工业大学814/908 微机原理考研真题2009年浙江工业大学814/908 微机原理考研真题2010年浙江工业大学814/908 微机原理考研真题2011年浙江工业大学814/908 微机原理考研真题2012年浙江工业大学814/908 微机原理考研真题2013年浙江工业大学814/908 微机原理考研真题2014年浙江工业大学814/908 微机原理考研真题2015年浙江工业大学814/908 微机原理考研真题2016年浙江工业大学814/908 微机原理考研真题2017年浙江工业大学814/908 微机原理考研真题2018年浙江工业大学814/908 微机原理考研真题2019年浙江工业大学814/908 微机原理考研真题2020年浙江工业大学814/908 微机原理考研真题(考前宣布)第五章浙江工业大学微机原理高分复习笔录及冲刺笔录第六章浙江工业大学机械原理考研高分学长复习经验(群分享)浙江工业大学814/908 微机原理考研真题资料2006-2020 年浙江工业大学814/908 微机原理考研真题详解2006 年浙江工业大学814/908 微机原理考研真题答案2007年浙江工业大学814/908 微机原理考研真题答案2008年浙江工业大学814/908 微机原理考研真题答案2009年浙江工业大学814/908 微机原理考研真题答案2010年浙江工业大学814/908 微机原理考研真题答案2011年浙江工业大学814/908 微机原理考研真题答案2012年浙江工业大学814/908 微机原理考研真题答案2013年浙江工业大学814/908 微机原理考研真题答案2014年浙江工业大学814/908 微机原理考研真题答案2015年浙江工业大学814/908 微机原理考研真题答案2016年浙江工业大学814/908 微机原理考研真题答案2017年浙江工业大学814/908 微机原理考研真题答案2018年浙江工业大学814/908 微机原理考研真题答案2019年浙江工业大学814/908 微机原理考研真题答案2020年浙江工业大学814/908 微机原理考研真题答案第四章 2019 年浙江工业大学微机原理考研题库模板总结。
机械专业课真题汇总机械原理真题09重庆大学机械原理真题11山东科技大学机械原理真题18华中农业大学机械原理真题2010武汉理工机械原理09山东科技大学机械原理真题19西安电子科技大学机械原理2015西工程机械原理试题及答案解析05年上海理工大学机械原理13年上海理工大学机械原理2010武汉理工机械原理20浙江工业大学机械原理14西安电子科技大学机械原理17西安电子科技大学机械原理18西安电子科技大学机械原理2019浙江理工大学机械设计基础2018浙江理工大学机械设计基础2017浙江理工大学机械设计基础2020温州大学机械原理2009武汉理工机械原理2012河北工业大学机械原理2010北京交通大学机械原理2020南京航空航天大学机械原题真题2020机械原理考研真题及答案(武汉科技大学)2019机械原理真题及答案(武汉科技大学)2018机械原理真题及答案(武汉科技大学)2017机械原理真题及答案(武汉科技大学)2016机械原理真题及答案(武汉科技大学)2015机械原理真题及答案(武汉科技大学)2014机械原理真题及答案(武汉科技大学)2013机械原理真题及答案(武汉科技大学)2012机械原理真题(武汉科技大学)2011机械原理真题(武汉科技大学)2011机械原理真题答案(武汉科技大学)2019杭州电子科技大学机械原题真题2012南京航空航天大学机械原题真题2013东南大学机械原题真题2011东南大学机械原题真题及答案2004福州大学机械考研真题答案2004福州大学机械考研真题2011中国矿业大学机械原理真题2014江苏理工学院机械原理真题A答案2014江苏理工学院机械原理真题A上海理工大学机械06年考研真题笔记(一)上海理工大学机械07年考研真题笔记(二)上海理工大学机械08、10、12、13年考研真题笔记(三)2007河北工业大学机械原理真题答案2007河北工业大学机械原理真题2018西安工业大学机械原理真题2019三峡大学机械原理考研真题2018三峡大学机械原理考研真题2015年南京理工大学机械原理考研真题2019年武汉科技大学机械原理考研真题江苏大学803机械原理样题答案江苏大学803机械原理考试样题2012江苏大学803机械原理考研真题2008江苏大学803机械原理考研真题2006江苏大学803机械原理考研真题2011江苏大学803机械原理考研真题2007江苏大学803机械原理考研真题2009江苏大学803机械原理考研真题2010江苏大学803机械原理考研真题2016年中山大学886机械原理考研真题05合肥工业机械原理17昆明理工机械原理20昆明理工机械原理19昆明理工机械原理机械设计/机械设计基础真题2021扬州大学机械设计真题07江南大学机械设计真题08江南大学机械设计真题07浙江大学机械设计基础真题18广东工业大学机械设计基础真题2016太原科大机械设计基础真题中国科学院大学20机械设计真题15广东工业大学机械设计基础真题07天津工业大学机械设计基础真题11厦门大学机械设计基础真题2012宁夏大学机械考研试题2018浙江理工大学机械设计基础2017宁夏大学机械设计2010西安理工机械设计基础2018山东大学机械设计基础2013深圳大学机械设计基础2007西安交通大学机械设计基础2008西安交通大学机械设计基础2019湖北工业大学机械设计真题2020湖北工业大学机械设计真题2018湖北工业大学机械设计真题20南京工业大学机械设计真题20河海大学机械考研真题及答案2018华侨大学机械设计考研真题2018广州大学机械设计真题答案2018广州大学机械设计真题2016广州大学机械设计真题答案2016广州大学机械设计真题2015广州大学机械设计真题答案2015广州大学机械设计真题2014广州大学机械设计真题答案2014广州大学机械设计真题2020广东工业大学机械设计基础真题答案2020广东工业大学机械设计基础真题2019广东工业大学机械设计基础真题答案2019广东工业大学机械设计基础真题2008西安交通大学机械设计基础真题答案西安交通大学2008年机械设计基础真题2014年江西理工大学机械设计基础考研真题2018年山东大学844机械设计基础考研真题2017年山东大学844机械设计基础考研真题2016年山东大学844机械设计基础考研真题2019年广东工业大学801机械设计基础考研真题2017年华南理工大学856机械设计基础考研真题2018东华理工大学832机械设计考研真题2017东华理工大学832机械设计考研真题2017东华理工大学832考研真题答案2016东华理工大学832机械设计考研真题2016东华理工大学832考研真题答案2011广东工业大学机械设计基础真题2011广东工业大学机械设计基础真题答案华中科技大学2010年机械设计基础真题湘潭大学2013年机械设计基础真题2011宁夏大学机械设计(含机械原理)考研真题厦门大学2012年机械设计基础真题中国科学技术大学2014年机械设计真题材料力学真题2015年南京理工大学材料力学考研真题2014年江西理工大学材料力学考研真题2017年华南理工大学841材料力学考研真题2008年吉林大学材料力学真题答案(资料样板)2020南京航空航天大学材料力学真题理论力学真题2004燕山大学理论力学2015年南京理工大学理论力学考研真题2019年宁波大学理论力学考研真题(B卷)2015青岛理工大学814理论力学考研真题2012南京航空航天大学815理论力学考研真题汽车理论真题2019年武汉科技大学汽车理论考研真题2018年华南理工大学812汽车理论考研真题答案2018浙江工业大学819汽车理论考研真题2019年广东工业大学805汽车理论考研真题2018年华南理工大学812汽车理论考研真题2017年华南理工大学812汽车理论考研真题2016年华南理工大学812汽车理论考研真题液压传动真题2019年武汉科技大学液压传动考研真题流体力学真题2017年华南理工大学836流体力学与传热考研真题2016年华南理工大学836流体力学与传热考研真题每日一题:静平衡的转子( B )是动平衡的,动平衡的转子( A )是静平衡。
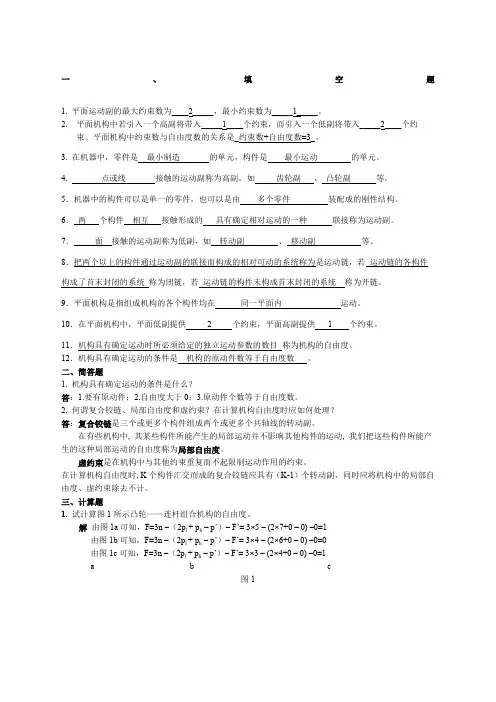
一、填空题1. 平面运动副的最大约束数为____2_____,最小约束数为_____1_____。
2.平面机构中若引入一个高副将带入_____1____个约束,而引入一个低副将带入_____2____个约束。
平面机构中约束数与自由度数的关系是_约束数+自由度数=3_。
3. 在机器中,零件是最小制造的单元,构件是最小运动的单元。
4. 点或线接触的运动副称为高副,如齿轮副、凸轮副等。
5.机器中的构件可以是单一的零件,也可以是由多个零件装配成的刚性结构。
6.两个构件相互接触形成的具有确定相对运动的一种联接称为运动副。
7.面接触的运动副称为低副,如转动副、移动副等。
8.把两个以上的构件通过运动副的联接而构成的相对可动的系统称为是运动链,若运动链的各构件构成了首末封闭的系统称为闭链,若运动链的构件未构成首末封闭的系统称为开链。
9.平面机构是指组成机构的各个构件均在同一平面内运动。
10.在平面机构中,平面低副提供 2 个约束,平面高副提供 1 个约束。
11.机构具有确定运动时所必须给定的独立运动参数的数目称为机构的自由度。
12.机构具有确定运动的条件是机构的原动件数等于自由度数。
二、简答题1. 机构具有确定运动的条件是什么?答:1.要有原动件;2.自由度大于0;3.原动件个数等于自由度数。
2. 何谓复合铰链、局部自由度和虚约束?在计算机构自由度时应如何处理?答:复合铰链是三个或更多个构件组成两个或更多个共轴线的转动副。
在有些机构中, 其某些构件所能产生的局部运动并不影响其他构件的运动, 我们把这些构件所能产生的这种局部运动的自由度称为局部自由度。
虚约束是在机构中与其他约束重复而不起限制运动作用的约束。
在计算机构自由度时, K个构件汇交而成的复合铰链应具有(K-1)个转动副,同时应将机构中的局部自由度、虚约束除去不计。
三、计算题1. 试计算图1所示凸轮——连杆组合机构的自由度。
解由图1a可知,F=3n –(2p l + p h–p’)–F’= 3×5 – (2×7+0 – 0) –0=1由图1b可知,F=3n –(2p l + p h–p’)–F’= 3×4 – (2×6+0 – 0) –0=0由图1c可知,F=3n –(2p l + p h–p’)–F’= 3×3 – (2×4+0 – 0) –0=1a b c图15. 试计算图2所示的压床机构的自由度。
![(NEW)浙江工业大学机械工程学院《907机械原理》(II)[专业硕士]历年考研真题汇编](https://uimg.taocdn.com/4467bd7128ea81c759f57882.webp)
目 录
2010年浙江工业大学848机械原理(Ⅱ)[专业硕士]考研真题汇编
2011年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2012年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2013年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2014年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2015年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2016年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2017年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2018年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2019年浙江工业大学机械工程学院907机械原理(Ⅱ)[专业硕士]考研真题汇编
2010年浙江工业大学848机械原理(Ⅱ)[专业硕士]考研真题汇编
2011年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2012年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2013年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2014年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2015年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编
2016年浙江工业大学907机械原理(Ⅱ)[专业硕士]考研真题汇编。
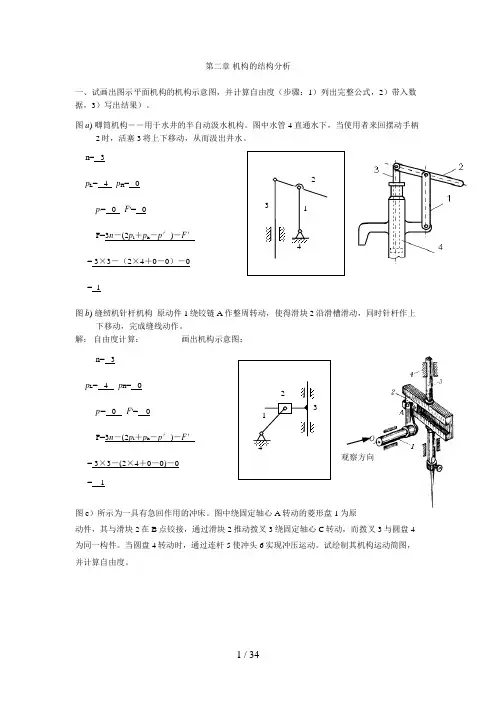
第二章 机构的结构分析一、试画出图示平面机构的机构示意图,并计算自由度(步骤:1)列出完整公式,2)带入数据,3)写出结果)。
图a ) 唧筒机构――用于水井的半自动汲水机构。
图中水管4直通水下,当使用者来回摆动手柄2时,活塞3将上下移动,从而汲出井水。
n= 3 p L = 4 p H = 0p '= 0 F '= 0F=3n -(2p l +p h -p ′)-F ′= 3×3-(2×4+0-0)-0 = 1图b ) 缝纫机针杆机构 原动件1绕铰链A 作整周转动,使得滑块2沿滑槽滑动,同时针杆作上下移动,完成缝线动作。
解: 自由度计算: 画出机构示意图:n= 3 p L = 4 p H = 0p '= 0 F '= 0F=3n -(2p l +p h -p ′)-F ′ = 3×3-(2×4+0-0)-0 = 1图c )所示为一具有急回作用的冲床。
图中绕固定轴心A 转动的菱形盘1为原动件,其与滑块2在B 点铰接,通过滑块2推动拨叉3绕固定轴心C 转动,而拨叉3与圆盘4为同一构件。
当圆盘4转动时,通过连杆5使冲头6实现冲压运动。
试绘制其机构运动简图,并计算自由度。
观察方向3241 432 1解:1) 选取适当比例尺μl ,绘制机构运动简图(见图b)2) 分析机构是否具有确定运动n= 5 p L = 7 p H = 0 p '= 0 F '= 0F =3n -(2p l +p h -p ′)-F ′= 3×5-(2×7+0-0)-0 = 1 机构原动件数目= 1 机构有无确定运动? 有确定运动想一想1.如何判断菱形盘1和滑块是否为同一构件?它们能为同一构件吗?2 为了使冲头6得到上下运动,只要有机构CDE 即可,为什还要引入机构ABC ?(可在学过第三章后再来想想)二、图a)所示为一简易冲床的初拟设计方案。
浙江工业大学机械原理考试试卷及参考答案2一、单项选择题(5’)1.对于一对齿轮传动,若保持其传动比、齿数和齿宽不变,则()。
A、齿轮的弯曲强度不变,接触强度改变B、齿轮的弯曲强度改变,接触强度不变C、齿轮的弯曲强度不变,接触强度不变D、齿轮的弯曲强度改变,接触强度改变答案:D2.若不考虑其他因素,单从减轻飞轮的重量上看,飞轮应安装在()。
A、高速轴上B、低速轴上C、任意轴上答案:A3.在曲柄摇杆机构中,只有当()为主动件时,才会出现“死点”位置。
A、连杆B、机架C、摇杆D、曲柄答案:C4.由N个构件组成的平面机构,其瞬心总数为()。
A、NB、N-1C、(N-1)/2D、N(N-1)/2答案:D5.曲柄滑块机构是由()演化而来的。
A、曲柄摇杆机构B、双曲柄机构C、双摇杆机构D、以上答案均不对答案:A6.考虑摩擦的转动副,不论轴颈在加速、等速、减速不同状态下运转,其总反力的作用线()切于摩擦圆。
A、都不可能B、不全是C、一定都答案:C7.渐开线直齿圆柱标准齿轮是指()的齿轮。
A、分度圆上模数和压力角为标准值B、节圆等于分度圆C、分度圆上齿厚度等于齿槽宽,而且模数、压力角以及齿项高与模数之比、齿根高与模数之比均为标准值答案:C8.在机械中,驱动力与其作用点的速度方向()。
A、一定同向B、可成任意角度C、相同或成锐角D、成钝角答案:C9.为了减小机械运转中周期性速度波动的程度,应在机械中安装()。
A、调速器B、飞轮C、变速装置答案:B10.机器安装飞轮后,原动机的功率可以比未安装飞轮时()。
A、一样B、大C、小D、A、C的可能性都存在答案:D11.杆组是自由度等于()的运动链。
A、0B、1C、2D、原动件数答案:A12.铰链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构()。
A、有曲柄存在B、不存在曲柄C、有时有曲柄,有时没曲柄D、以上答案均不对答案:B13.当曲柄摇杆机构的摇杆带动曲柄运动时,曲柄在“死点”位置的瞬时运动方向是()。
1. 平面运动副的最大约束数为____2_____,最小约束数为_____1_____。
2.平面机构中若引入一个高副将带入_____1____个约束,而引入一个低副将带入_____2____个约束。
平面机构中约束数与自由度数的关系是_约束数+自由度数=3_。
3. 在机器中,零件是最小制造的单元,构件是最小运动的单元。
4. 点或线接触的运动副称为高副,如齿轮副、凸轮副等。
5.机器中的构件可以是单一的零件,也可以是由多个零件装配成的刚性结构。
6.两个构件相互接触形成的具有确定相对运动的一种联接称为运动副。
7.面接触的运动副称为低副,如转动副、移动副等。
8.把两个以上的构件通过运动副的联接而构成的相对可动的系统称为是运动链,若运动链的各构件构成了首末封闭的系统称为闭链,若运动链的构件未构成首末封闭的系统称为开链。
9.平面机构是指组成机构的各个构件均在同一平面内运动。
10.在平面机构中,平面低副提供 2 个约束,平面高副提供 1 个约束。
11.机构具有确定运动时所必须给定的独立运动参数的数目称为机构的自由度。
12.机构具有确定运动的条件是机构的原动件数等于自由度数。
二、简答题1. 机构具有确定运动的条件是什么?答:1.要有原动件;2.自由度大于0;3.原动件个数等于自由度数。
2. 何谓复合铰链、局部自由度和虚约束?在计算机构自由度时应如何处理?答:复合铰链是三个或更多个构件组成两个或更多个共轴线的转动副。
在有些机构中, 其某些构件所能产生的局部运动并不影响其他构件的运动, 我们把这些构件所能产生的这种局部运动的自由度称为局部自由度。
虚约束是在机构中与其他约束重复而不起限制运动作用的约束。
在计算机构自由度时, K个构件汇交而成的复合铰链应具有(K-1)个转动副,同时应将机构中的局部自由度、虚约束除去不计。
1. 试计算图1所示凸轮——连杆组合机构的自由度。
解由图1可知,B,E两处的滚子转动为局部自由度,即F’=2;而虚约束p’=0,则n=7,p l=8(C,F处虽各有两处接触,但都各算一个移动副),p h=2,于是由式(1.2)得F=3n –(2p l + p h– p’)– F’= 3×7 – (2×8+2 – 0) –2=1这里应注意:该机构在D处虽存在轨迹重合的问题,但由于D处相铰接的双滑块为一个Ⅱ级杆组,未引入约束,故机构不存在虚约束。