助力电机性能参数表
- 格式:doc
- 大小:84.50 KB
- 文档页数:2
电机运行的参数
电机运行的参数主要包括以下几种:
额定电压:指电动机额定运行时,外加于定子绕组上的线电压,单位为伏(V)。
一般来说,电源电压要与电动机额定电压相符。
额定频率:单位是Hz,指电动机在额定电压下工作的频率。
额定功率:指电动机在额定电压和额定频率下,输出机械功率的标准值。
额定电流:指电动机在额定电压下,空载稳态运行时输入的有效电流。
效率:单位是g/w,代表每单位功率所产生的推力大小。
转速:电机的旋转速率,一般使用转/分来表示。
电机的转速与电源电压、负载情况、电机的型号等有关。
转矩:指电机输出的力矩,一般使用牛·米(Nm)来表示。
负载转速:正常工作电压下电机带负载的转速。
负载力矩:正常工作电压下电机带负载的力矩(N· m)。
负载电流:负载电流是指电机拖动负载时实际检测到的定子电流数值。
空载电流:正常工作电压下电机不带任何负载的工作电流(单位mA (毫安))。
越好的电机,在空载时,该值越小。
堵转力矩:在电机受反向外力使其停止转动时的力矩。
如果电机堵转现象经常出现,则会损坏电机,或烧坏驱动芯片。
所以大家选电机时,这是除转速外要考虑的参数。
堵转时间一长,电机温度上升的很快,这个值也会下降的很厉害。
堵转电流:在电机受反向外力使其停止转动时的电流,此时电流非常
大,时间稍微就可能烧毁电机,在实际使用时应尽量避免。
减速比:是指没有减速齿轮时转速与有减速齿轮时转速之比。
KV值:表示电机运行速度的指标,电机转速=KV值x 工作电压。
三轮电轿电机的参数表序号 | 参数名称 | 参数值---|---|---1 | 额定功率 | 1.2 kW2 | 最大输出扭矩| 110 N·m3 | 额定电压 | 48 V4 | 额定电流 | 25 A5 | 最高转速 | 4500 rpm6 | 电机类型 | 永磁同步电机7 | 整机重量 | 265 kg8 | 驱动方式 | 后轮驱动9 | 电机保护等级 | IP5410 | 电机转子材料 | 铝合金11 | 电机控制器 | 48 V智能控制器12 | 电机冷却方式 | 强制风冷三轮电轿电机是电动车的核心部件之一,其参数表是评估电动车性能的重要依据。
以下将对三轮电轿电机的各项参数进行详细解读。
首先是额定功率,它是电机在额定工作条件下所能提供的最大功率。
在三轮电轿上,额定功率通常不会太高,一般在1 kW到1.5 kW 之间。
其次是最大输出扭矩,它是电机输出扭矩的最大值。
三轮电轿的最大输出扭矩通常在100 N·m以上,这也是确保车辆有足够动力的关键之一。
再来是额定电压和额定电流,它们分别是电机在额定工作条件下所需的电压和电流。
三轮电轿的额定电压通常为48 V,而额定电流则根据电机功率和电压来确定。
在三轮电轿中,电流不会太大,一般在20 A到30 A之间。
最高转速是电机能够达到的最高转速,通常在4000 rpm到5000 rpm之间。
三轮电轿的电机类型一般为永磁同步电机,它具有高效、轻质、可靠等优点。
整机重量是指电车本身的重量,包括电机、电池、底盘等部件。
在三轮电轿中,整机重量一般在200 kg到300 kg之间。
驱动方式是指电机如何驱动车轮,三轮电轿通常采用后轮驱动方式,这种方式可以提高车辆的稳定性和安全性。
电机保护等级是指电机所具有的防护等级,它能够防止电机受到外界的影响而受损。
在三轮电轿中,电机保护等级一般为IP54,能够防止电机受到风吹雨淋的侵害。
电机转子材料是指电机转子的材料,三轮电轿的电机转子通常采用铝合金材料,它具有重量轻、导热性好等优点。
XXD电机配桨拉力表:A2217KV930GWS1047RS桨,11V 12.1A,6430转,推力788克。
10V 10.9A,6130转,推力710克。
(500克级别的3 D配置,3S 12-15C 1000-1500mAh)GWS1060HD桨,11V 9.9A,7130转,推力650克。
10V 8.6A,6690转,推力575克。
A2212 KV1000新西达1060HD桨,11V 13.1A,7630转,推力745克。
10V 11.6A,7260转,推力675克。
(450-550克的3D配置,3S 12-15C 1000-1500mAh)新西达9050HD桨,11V 10.5A 8430转,推力681克。
10V 9.2A 7900转,推力603克。
(300-400克的3D 配置,3S 10-12C 800-1200mAh)A2212 KV1400GWS1047RS桨,8V 18A,6380转,推力775克。
7V 15.1A,5860转,推力650克。
(400-450克的3D配置,2S 12—15C 1200-1500mAh)新西达1060HD桨,8V 15.2A,7220转,推力670克,7V 12.7A,6560转,推力553克。
新西达9050HD桨,11V 18.9A,9720转,推力903克,10V,15.4A,9240转,推力816克。
新西达8060HD桨,11V 17.8A,10250转(破桨了),10V,15.4A,9660转。
(600克级别的电动3A 普通固定翼的配置)新西达8040HD桨,11V 12.6A,11800转,推力700克。
10V 11A,11000转,推力606克。
A2212 KV2200新西达7035桨,11V 21.1A,18800转,10V 19.1A,17600转。
(400-650克级别,高速飞翼后推像真机用的配置。
3S 15-20C 1500-2000mAh)新西达8040HD桨,11V21.1A 16900转推力620克,8V 21.5A,11970转,7V 17.8A,10950转A2208 KV1200GWS9050HD桨:11V 10.8A,8030转,推力600克。
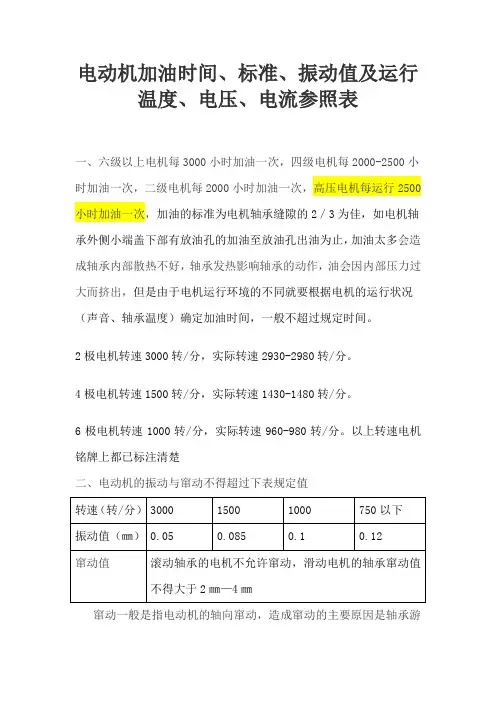
电动机加油时间、标准、振动值及运行温度、电压、电流参照表一、六级以上电机每3000小时加油一次,四级电机每2000-2500小时加油一次,二级电机每2000小时加油一次,高压电机每运行2500小时加油一次,加油的标准为电机轴承缝隙的2/3为佳,如电机轴承外侧小端盖下部有放油孔的加油至放油孔出油为止,加油太多会造成轴承内部散热不好,轴承发热影响轴承的动作,油会因内部压力过大而挤出,但是由于电机运行环境的不同就要根据电机的运行状况(声音、轴承温度)确定加油时间,一般不超过规定时间。
2极电机转速3000转/分,实际转速2930-2980转/分。
4极电机转速1500转/分,实际转速1430-1480转/分。
6极电机转速1000转/分,实际转速960-980转/分。
以上转速电机铭牌上都已标注清楚二、电动机的振动与窜动不得超过下表规定值窜动一般是指电动机的轴向窜动,造成窜动的主要原因是轴承游隙过大,表现出的症状是电机振动、噪音明显加大。
二、关于电动机温升问题的技术说明要点一、说到电动机的有关温升问题,首先解释一下有关电动机的绝缘等级、允许温升和性能参考温度等名词术语。
1、电动机的绝缘等级是指其所用绝缘材料的耐热等级,从低到高常见的分A、E、B、F、H级。
绕组温升限值(允许温升)是指电动机的温度与周围环境温度相比升高的限度。
2、性能参考温度,是指在此最高温度下,对应绝缘级别能有效保证电机可靠运行,不置影响电机性能。
3、最高允许工作温度(极限工作温度)是指电机在设计预期寿命内运行时,绕组绝缘材料允许最高点的工作温度。
如果运行温度超过材料的极限工作温度,则绝缘的老化加剧,寿命大大缩短。
其对应经验值关系如下表:(因内部绕组绝缘材料无法准确测量,存在测量误差,实际运行中以比较可行的外壳温度值为依据测算,加红部分为实际运行过程中建议控制值)说明:衡量电机发热程度是用“温升”而不是用“温度”,其单位为K(开尔文),K是一个变量的单位,而℃是一个常量的单位。
小船手持式电动推进器数据表近年来,小船手持式电动推进器越来越受到消费者的喜爱。
这款产品凭借其出色的性能和便捷的操作,赢得了广泛关注。
下面,我们就来详细了解一下小船手持式电动推进器的各项性能参数和使用注意事项。
一、产品简介小船手持式电动推进器是一款适用于小船、快艇等水上交通工具的推进设备。
它采用高性能电机,具有高效、节能、稳定的特点,能够为用户提供舒适、安全的水上驾驶体验。
二、技术参数1.电机功率:1200W-2400W2.电池容量:40Ah-80Ah3.续航里程:2-5公里(根据负载和水面条件而定)4.速度:1-6米/秒(根据负载和水面条件而定)5.防水等级:IP68三、功能特点1.便携式设计:小船手持式电动推进器采用轻量化设计,便于携带和安装。
2.智能控制:配备液晶显示屏,实时显示运行状态,便于用户调整参数。
3.双向驱动:前进、后退一键切换,操作简单。
4.安全保护:具有过载保护、低电压保护等功能,确保设备安全运行。
5.噪音低:采用高效降噪技术,使用过程中噪音较小,舒适度高。
四、适用场景小船手持式电动推进器适用于各类小船、快艇等水上交通工具,特别是在景区游览、钓鱼、救援等场景下,更能发挥其便捷、高效的优点。
五、注意事项1.在使用前,请仔细阅读产品说明书,了解设备性能和操作方法。
2.确保电池充足,以免影响使用效果。
3.操作过程中,请勿让儿童接触设备,以防意外伤害。
4.使用结束后,请将设备放置在干燥、通风处,避免阳光直射。
5.定期检查设备,如有异常现象,请及时停止使用并联系售后服务。
总之,小船手持式电动推进器凭借其出色的性能和便捷的操作,成为了水上交通工具的理想选择。
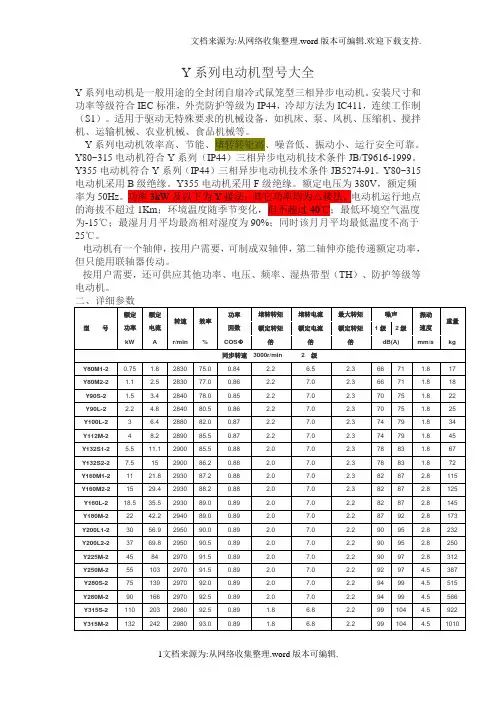
Y系列电动机型号大全
Y系列电动机是一般用途的全封闭自扇冷式鼠笼型三相异步电动机。
安装尺寸和功率等级符合IEC标准,外壳防护等级为IP44,冷却方法为IC411,连续工作制(S1)。
适用于驱动无特殊要求的机械设备,如机床、泵、风机、压缩机、搅拌机、运输机械、农业机械、食品机械等。
Y系列电动机效率高、节能、堵转转矩高、噪音低、振动小、运行安全可靠。
Y80~315电动机符合Y系列(IP44)三相异步电动机技术条件JB/T9616-1999。
Y355电动机符合Y系列(IP44)三相异步电动机技术条件JB5274-91。
Y80~315电动机采用B级绝缘。
Y355电动机采用F级绝缘。
额定电压为380V,额定频率为50Hz。
功率3kW及以下为Y接法;其它功率均为△接法。
电动机运行地点的海拔不超过1Km;环境温度随季节变化,但不超过40℃;最低环境空气温度为-15℃;最湿月月平均最高相对湿度为90%;同时该月月平均最低温度不高于25℃。
电动机有一个轴伸,按用户需要,可制成双轴伸,第二轴伸亦能传递额定功率,但只能用联轴器传动。
按用户需要,还可供应其他功率、电压、频率、湿热带型(TH)、防护等级等电动机。
两轮电动车轮毂电机参数表参数表如下:1. 电机类型:直流无刷电机2. 额定功率:500W3. 额定电压:48V4. 额定转速:3000rpm5. 最大扭矩:25N·m6. 额定电流:10A7. 空载电流:1A8. 效率:≥85%9. 重量:5kg10. 外形尺寸:直径180mm,厚度100mm电动车轮毂电机是一种集电机、减速器和轮毂于一体的装置,能够直接安装在车轮上,驱动车辆前进。
它的参数对于电动车的性能和使用效果有着重要影响。
该电动车轮毂电机采用的是直流无刷电机技术。
相比传统的有刷电机,无刷电机具有更高的效率、更长的寿命和更低的噪音。
它通过电子调速系统实现控制,能够提供更加精准的转速控制和扭矩输出。
电动车轮毂电机的额定功率为500W,额定电压为48V。
这意味着电机能够在48V的电压下输出500W的功率,为电动车提供足够的动力。
额定转速为3000rpm,表明电机在额定负载下的旋转速度为每分钟3000转。
最大扭矩为25N·m,表示电机能够提供的最大转矩为25牛·米。
这决定了电动车在起步和爬坡时的动力输出能力。
额定电流为10A,空载电流为1A,这些参数反映了电机的功耗和负载能力。
电动车轮毂电机的效率为85%以上,这意味着电机能够将输入的电能有效地转换为机械能,减少能量的浪费。
其重量为5kg,外形尺寸为直径180mm,厚度100mm,这决定了电机的安装空间和整车的重量分布。
两轮电动车轮毂电机的参数直接影响了电动车的性能和使用效果。
选择合适的电机参数能够实现更好的动力输出和能量利用效率,提高电动车的行驶性能和续航里程。
因此,在选购电动车时,消费者需要关注电机参数,并根据自身需求选择适合的电机类型和参数配置。
新能源汽车驱动电机的技术参数新能源汽车驱动电机是电动汽车的核心部件之一,其性能参数直
接影响着汽车的续航里程、加速性能和稳定性等方面。
具体而言,新
能源汽车驱动电机的技术参数主要包括以下几个方面:
1. 功率:驱动电机的功率决定了汽车的加速能力和最高车速。
大
多数新能源汽车的驱动电机功率在50千瓦到200千瓦之间。
2. 扭矩:驱动电机的扭矩决定了汽车的起步能力和爬坡能力。
扭
矩过大可能会影响传动系统的寿命。
新能源汽车的驱动电机扭矩通常
在200牛·米到600牛·米之间。
3. 转速范围:驱动电机的转速范围决定了汽车的运行效率和续航
里程。
适当提高转速范围可以提高汽车的运行效率和续航里程。
新能
源汽车的驱动电机转速范围通常在1000转/分到15000转/分之间。
4. 效率:驱动电机的效率决定了汽车的能耗和续航里程。
通常来说,电机的效率越高,汽车的能耗越低,续航里程越远。
新能源汽车
的驱动电机效率通常在90%以上。
5. 重量和体积:驱动电机的重量和体积也是技术参数之一。
较轻
的电机可以降低汽车的整体重量,提高能源利用率和续航里程。
同时,较小的体积可以减少电机的空间占用,提高汽车的舒适性和乘坐空间。
总之,新能源汽车驱动电机的技术参数直接关系到汽车的综合性
能和市场价值,对于新能源汽车的研发和生产具有重要的意义。
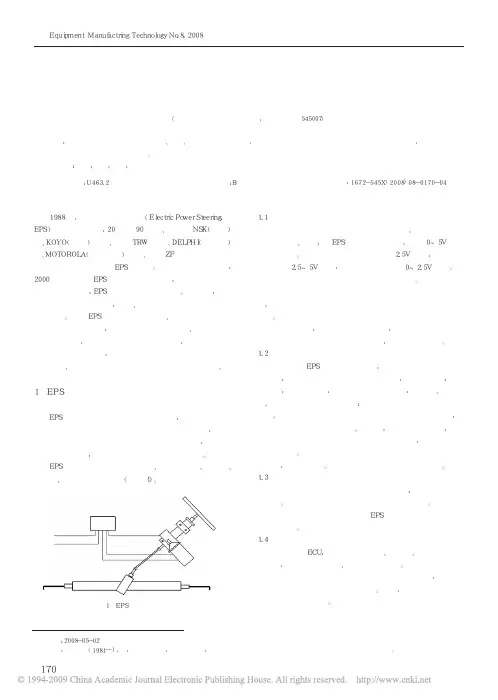
电动助力转向系统的研究与设计摘要电动助力转向系统(Electric Power Steering System,简称EPS),是汽车工程领域的热门课题之一。
本文在研究了电动助力转向系统工作原理的基础上,设计开发了EPS的电子控制单元ECU (Electronic Control Unit)的硬件电路和相应的控制软件框图。
本文详细分析了电动助力转向系统电子控制单元的功能,研究开发了以89c52单片机为微处理器的电子控制单元。
控制单元具有实时数据信号采集和系统控制功能,根据采集的数据信号,确定电动机输出的目标电流,利用PWM脉宽调制技术,通过H桥式电路控制电动机的输出电流和转动方向,实现助力转向功能。
在研制了实验用ECU装置后,开发了相应的控制软件。
控制软件分为控制策略的实现和数据信号采集与分析两部分。
整个软件系统采用了模块化的设计思想。
在数据信号采集与控制部分,设计了系统主程序、A/D采集程序、车速信号采集程序和PWM控制程序。
本文所设计的EPS电子控制单元性能稳定,结构合理,与整车匹配性能好,可保证EPS实现良好的转向助力效果。
关键词:电动助力转向电子控制单元单片机控制策略Electronic power steering system Research and DesignABSTRACTElectric Power Steering System (EPS) is one of the focuses research in automotive engineering. This paper is based on the principles of EPS to study the operation, designed and developed the Electronic Control Unit (ECU) and the soft ware diagram of the ECU.The thesis Considers the functions of the electronic control unit of EPS, studied and developed the hardware that adopted 89c51as its microprocessor. The control unit was able to realize real-time data/signal acquisition and system control. The target current of motor output could be determined by the obtained data; and utilizing the Pulse-Width Modulation (PWM) technology, power could be provided to the steering system by controlling the output current and rotation direction through H-bridge circuit.The software program, which was divided into the realization of control strategy and the acquisition & control of data/signal, was developed in modular after the design of experimental ECU was completed. And the main program, A/D acquisition program, speed signal acquisition program and PWM control program are developed in the second part.The result showed that the electronic control unit designed was with stable performance, appropriate structure and excellent matching condition, and the excellent power steering effect could be ensured by EPS.Key words: Electric Power Steering System (EPS) Electronic Control Unit Single-Chip Microprocessor Control Strategy目录前言 (1)第1章绪论 (2)1.1汽车电动助力转向系统的特点 (2)1.2电动助力转向系统国内外的研究现状 (4)1.3 EPS的发展趋势和急待解决的核心技术 (5)1.4本课题研究的目的与意义 (6)第2章电动助力转向系统方案确定及工作原理 (7)2.1电动助力转向系统的工作原理 (9)2.1.1电动助力转向系统的组成和工作原理 (9)2.1.2电动助力转向系统的分类 (11)2.1.3电动助力转向系统的技术要求 (12)2.2电动助力转向系统的数学模型 (13)2.2.1转向盘和转向柱输入轴子模型 (14)2.2.2电动机模型 (14)2.2.3输出轴子模型 (16)2.2.4齿轮齿条子模型 (16)2.3电动助力转向系统的主要部分 (17)2.3.1转矩传感器 (18)2.3.2车速传感器 (19)2.3.3直流电动机 (20)2.3.4电磁离合器 (21)2.3.5减速机构 (22)2.3.6电子控制单元ECU (23)第3章电动助力转向系统的硬件设计 (24)3.1电子动力转向系统控制器的总体结构 (24)3.2控制器微处理芯片的选择 (26)3.2.1控制器微处理器常用芯片及选型 (26)3.2.2 89C52芯片及A/D转换芯片介绍 (26)3.2.3 89C52外部总线扩展及片外ROM的连接 (28)3.3控制器输入通道的设计 (30)3.3.1转矩信号的采集 (30)3.3.2电动机电流信号的采集 (31)3.3.3车速信号的采集 (33)3.4控制器输出通道的设计 (34)3.4.1电动机的PWM控制 (34)3.4.2电磁离合器和显示控制电路的设计 (39)3.4.3 电动机保护电路及继电器驱动电路设计 (40)3.5系统供电电源电路设计 (41)3.6系统硬件抗干扰措施 (42)第4章电动助力转向系统的软件设计 (45)4.1 EPS的控制策略 (45)4.1.1 EPS的PID控制 (45)4.2电子动力转向系统各功能模块的软件设计 (48)4.2.1 A/D采集程序 (48)4.2.2 PWM控制程序 (49)4.2.3车速信号采集程序 (51)4.2.4系统主程序 (53)结论 (55)谢辞 (56)参考文献 (57)附录 (59)外文资料翻译 (66)前言转向系统作为汽车的一个重要组成部分,其性能的好坏将直接影响到汽车的转向特性、稳定性和行驶安全性。
Y系列电动机型号大全
Y系列电动机是一般用途的全封闭自扇冷式鼠笼型三相异步电动机。
安装尺寸和功率等级符合IEC标准,外壳防护等级为IP44,冷却方法为IC411,连续工作制(S1)。
适用于驱动无特殊要求的机械设备,如机床、泵、风机、压缩机、搅拌机、运输机械、农业机械、食品机械等。
Y系列电动机效率高、节能、堵转转矩高、噪音低、振动小、运行安全可靠。
Y80~315电动机符合Y系列(IP44)三相异步电动机技术条件JB/T9616-1999。
Y355电动机符合Y系列(IP44)三相异步电动机技术条件JB5274-91。
Y80~315电动机采用B级绝缘。
Y355电动机采用F级绝缘。
额定电压为380V,额定频率为50Hz。
功率3kW及以下为Y接法;其它功率均为△接法。
电动机运行地点的海拔不超过1Km;环境温度随季节变化,但不超过40℃;最低环境空气温度为-15℃;最湿月月平均最高相对湿度为90%;同时该月月平均最低温度不高于25℃。
电动机有一个轴伸,按用户需要,可制成双轴伸,第二轴伸亦能传递额定功率,但只能用联轴器传动。
按用户需要,还可供应其他功率、电压、频率、湿热带型(TH)、防护等级等电动机。
一、旋转电机有哪些性能参数指标?1.异步电动机主要数据1)、相数2)、额定频率(Hz)3)、额定功率kW4)、额定电压V5)、额定电流A6)、绝缘等级7)、额定转速(极数)r/min8)、防护性能9)、冷却方式2.异步电机主要技术指标a)效率η:电动机输出机械功率与输入电功率之比,通常用百分比表示。
b)功率因数COSφ:电动机输入有效功率与视在功率之比。
c)堵转电流IA:电动机在额定电压、额定频率和转子堵住时从供电回路输入的稳态电流有效值。
d)堵转转矩TK:电动机在额定电压、额定频率和转子堵住时所产生转矩的最小测得值。
e)最大转矩TMAX:电动机在额定电压、额定频率和运行温度下,转速不发生突降时所产生的最大转矩。
f)噪声:电动机在空载稳态运行时A计权声功率级dB(A)最大值。
g)振动:电动机在空载稳态运行时振动速度有效值(mm/s)。
3.电动机主要性能中分为:一是起动性能;二是运行性能:起动性能有:起动转矩、起动电流。
一般起动转矩越大越好,而起动时的电流越小越好,在实际中通常以起动转矩倍数(起动转矩与额定转矩之比Tst/Tn)和起动电流倍数(起动电流与额定电流之比Ist/In)进行考核。
电机在静止状态时,一定电流值时所能提供的转矩与额定转矩的比值,表征电机的起动性能。
运行性能有:效率、功率因数、绕组温升(绝缘等级)、最大转矩倍数Tmax/Tn、振动、噪声等。
效率、功率因数、最大转矩倍数越大越好,而绕组温升、振动和噪声则是越小越好。
起动转矩、起动电流、效率、功率因数和绕组温升合称电机的五大性能指标。
二、电动机计算常用的公式1、电动机定子磁极转速n=(60×频率f)÷极对数p2、电动机额定功率P=1.732×线电压U×电流I×效率η功率因数COSΦ3、电动机额定力矩T=9550×额定功率P÷额定转速n三、防护型式IPXX (GB/T 4208 外壳防护分级(IP代码))防护标志由字母IP和两个表示防护等级的表征数字组成。