三角高程测量知识讲解
- 格式:ppt
- 大小:1.72 MB
- 文档页数:74
§5.9 三角高程测量三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。
这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。
三角点的高程主要是作为各种比例尺测图的高程控制的一部分。
一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。
5.9.1 三角高程测量的基本公式1.基本公式关于三角高程测量的基本原理和计算高差的基本公式,在测量学中已有过讨论,但公式的推导是以水平面作为依据的。
在控制测量中,由于距离较长,所以必须以椭球面为依据来推导三角高程测量的基本公式。
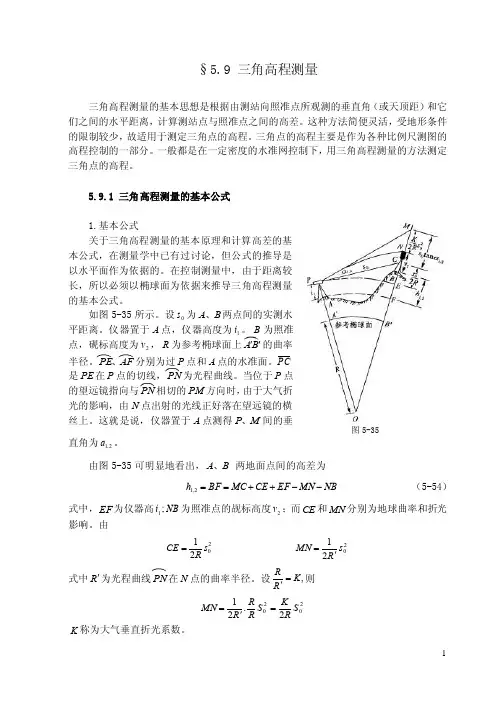
如图5-35所示。
设0s 为B A 、两点间的实测水平距离。
仪器置于A 点,仪器高度为1i 。
B 为照准点,砚标高度为2v ,R 为参考椭球面上B A ''的曲率半径。
AF PE 、分别为过P 点和A 点的水准面。
PC 是PE 在P 点的切线,PN 为光程曲线。
当位于P 点的望远镜指向与PN 相切的PM 方向时,由于大气折光的影响,由N 点出射的光线正好落在望远镜的横丝上。
这就是说,仪器置于A 点测得M P 、间的垂直角为2,1a 。
由图5-35可明显地看出,B A 、 两地面点间的高差为NB MN EF CE MC BF h --++==2,1 (5-54)式中,EF 为仪器高NB i ;1为照准点的觇标高度2v ;而CE 和MN 分别为地球曲率和折光影响。
由2021s R CE =2021s R MN '= 式中R '为光程曲线PN 在N 点的曲率半径。
设,K R R='则 20202.21S RK S R R R MN ='=K 称为大气垂直折光系数。
图5-35由于B A 、两点之间的水平距离0s 与曲率半径R 之比值很小(当km s 100=时,0s 所对的圆心角仅5'多一点),故可认为PC 近似垂直于OM ,即认为 90≈PCM ,这样PCM ∆可视为直角三角形。

§4-6 三角高程测量一、三角高程测量原理及公式在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。
传统的经纬仪三角高程测量的原理如图4-12所示,设A点高程及AB两点间的距离已知,求B点高程。
方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆),并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角δ,则AB两点间的高差计算公式为:故(4-11)式中为A、B两点间的水平距离。
图4-12 三角高程测量原理当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正数简称为两差改正:设c为地球曲率改正,R为地球半径,则c的近似计算公式为:设g为大气折光改正,则g的近似计算公式为:因此两差改正为:,恒为正值。
采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为:(4-12)为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB和hBA,最后取其平均值,由于hAB和hBA反号,因此可以抵销。
实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。
理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。
当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。
二、光电三角高程测量方法光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。
表4-6 光电三角高程测量技术要求往返各注:表4-6中为光电测距边长度。
对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。
三角高程测量1 三角高程测量的基本原理三角高程测量是通过观测两点间的水平距离和天顶距(或高度角)求定两点间的高差的方法。
它观测方法简单,不受地形条件限制,是测定大地控制点高程的基本方法。
目前,由于水准测量方法的发展,它已经退居次要位置,但在山区和丘陵地带依然被广泛采用。
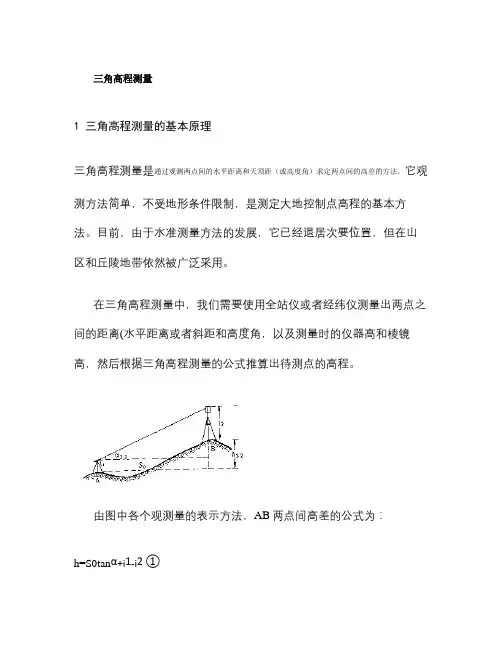
在三角高程测量中,我们需要使用全站仪或者经纬仪测量出两点之间的距离(水平距离或者斜距和高度角,以及测量时的仪器高和棱镜高,然后根据三角高程测量的公式推算出待测点的高程。
由图中各个观测量的表示方法,AB两点间高差的公式为:h=S0tanα+i1-i2 ①但是,在实际的三角高程测量中,地球曲率、大气折光等因素对测量结果精度的影响非常大,必须纳入考虑分析的范围。
因而,出现了各种不同的三角高程测量方法,主要分为:单向观测法,对向观测法,以及中间观测法。
1.1 单向观测法单向观测法是最基本最简单的三角高程测量方法,它直接在已知点对待测点进行观测,然后在①式的基础上加上大气折光和地球曲率的改正,就得到待测点的高程。
这种方法操作简单,但是大气折光和地球曲率的改正不便计算,因而精度相对较低。
1.2 对向观测法对向观测法是目前使用比较多的一种方法。
对向观测法同样要在A点设站进行观测,不同的是在此同时,还在B点设站,在A架设棱镜进行对向观测。
从而就可以得到两个观测量:直觇:hAB= S往tanα往+i往-v往+c往+r往②反觇:hBA= S返tanα返+i返-v返+c返+r返③S——A、B间的水平距离;α——观测时的高度角;i——仪器高;v——棱镜高;c——地球曲率改正;r——大气折光改正。
然后对两次观测所得高差的结果取平均值,就可以得到A、B两点之间的高差值。
由于是在同时进行的对向观测,而观测时的路径也是一样的,因而,可以认为在观测过程中,地球曲率和大气折光对往返两次观测的影响相同。
所以在对向观测法中可以将它们消除掉。
h=0.5(h AB- h BA=0.5[( S往tanα往+i往-v往+c往+r往-( S返tanα返+i返-v返+c返+r返]=0.5(S往tanα往-S返tanα返+i往-i返+v返-v往④与单向观测法相比,对向观测法不用考虑地球曲率和大气折光的影响,具有明显的优势,而且所测得的高差也比单向观测法精确。
三角高程测量原理讲解学习三角高程测量的原理基于三角形的几何性质和三角函数的运用。
三角高程测量中,我们通常选择一个具有高程已知的点作为起始点,再选择一个观测点作为目标点,然后使用测量仪器测量起始点和目标点之间的距离差和水平角差,从而推算目标点的高程。
1.设置基线:首先需要选择一个距离目标点较近的、地势相对较平坦的观测站点作为起始点,同时在观测站点上安装测量仪器,将其与目标点连线称为基线。
2.观测距离:在起始点测量仪器上安装测距仪,通过观测距离仪器测量起始点到目标点的水平距离。
测量时需要注意排除大气折射和大地曲率的影响,采用纠正方法对测量结果进行修正。
3.观测角度:在起始点测量仪器上安装测角仪,通过观测角度仪器测量起始点到目标点的水平角度差。
测角仪器可以测量水平方向的角度差,也可以测量垂直方向的角度差,根据具体情况选择合适的仪器。
4.计算高程差:根据观测距离和角度,可以使用三角函数计算出目标点的高程差。
其中,观测距离和角度差可以通过观测仪器直接读取,高程差的计算可以使用正弦定理、余弦定理等方法进行计算。
需要注意的是,在三角高程测量中,观测站点和目标点之间的距离差通常比较小,所以需要选用高精度的测距和测角仪器,同时在实际操作中也需要注意测量时的环境因素,如大气状态、地球引力等对测量结果的影响。
此外,三角高程测量还可以通过建立高程网,将多个观测点连接起来,依次进行三角高程测量,从而形成一个相对完整的高程测量网,对于大范围的地理位置高程测量具有较高的精度和可靠性。
总结起来,三角高程测量原理是一种通过测量观测站点与目标点之间的距离差和水平角差,然后利用三角函数的运算,来计算目标点的高程差的方法。
它是一种常用且有效的测量方法,可以用于山区、河流等地形复杂的区域,具有较高的精度和可靠性。
在实际操作中,需要选用高精度的测距和测角仪器,并注意环境因素对测量结果的影响。
通过建立高程网,可以拓展三角高程测量的应用范围,获得更全面的高程信息。
三角高程测量原理
三角高程测量原理是通过测量不同位置的角度来计算地面上的高程差。
这个原理是基于三角形的性质,根据三角形的内角和外角之间的关系,可以推导出高程差的计算公式。
测量过程中,需要选取两个测量点A和B,并在这两个点之间选择一个基准点O。
然后,用仰角仪或望远镜等测量工具,分别测量AOB、BOA和AOB三个角的大小。
测量出这三个角度后,可以根据三角形的内角和外角之间的关系来计算高程差。
根据三角形的内角和外角之间的关系,可以得到如下公式:
AOB + BOA + AOB = 180°
将测量的角度代入公式中,可以得到:
AOB + BOA + AOB = 180°
2AOB + BOA = 180°
AOB = (180° - BOA) / 2
根据这个公式,可以计算出AOB的角度,然后利用三角函数计算出高程差。
具体的计算方法可以根据具体的测量设备和测量要求进行选择和调整。
总之,三角高程测量原理是一种通过测量角度来计算地面高程
差的方法。
它利用了三角形的性质,通过测量不同位置的角度来计算地面高程差,可以广泛应用于地质勘探、土地测量和工程测量等领域。
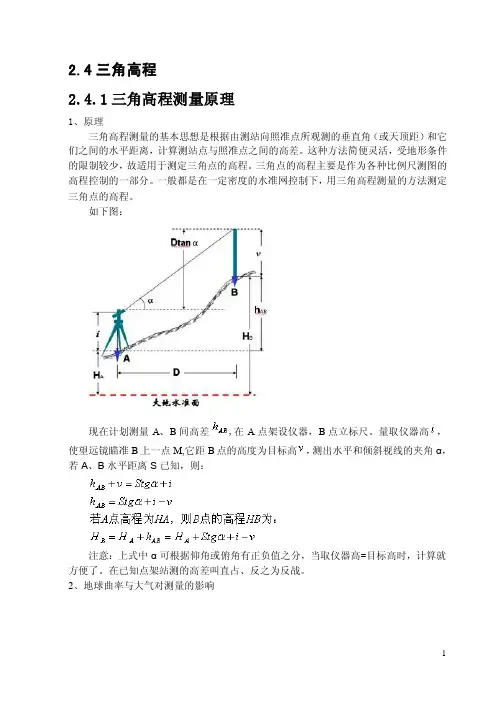
2.4三角高程2.4.1三角高程测量原理1、原理三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。
这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。
三角点的高程主要是作为各种比例尺测图的高程控制的一部分。
一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。
如下图:现在计划测量A、B间高差,在A点架设仪器,B点立标尺。
量取仪器高,使望远镜瞄准B上一点M,它距B点的高度为目标高,测出水平和倾斜视线的夹角α,若A、B水平距离S已知,则:注意:上式中α可根据仰角或俯角有正负值之分,当取仪器高=目标高时,计算就方便了。
在已知点架站测的高差叫直占、反之为反战。
2、地球曲率与大气对测量的影响我们在水准测量中知道,高程的测量受地球曲率的影响,仪器架在中间可以消除,三角高程也能这样,但是对于一些独立交会点就不行了。
三角高程还受大气折射的影响。
如图:加设A点的高程为,在A点架设仪器测量求出B点的高程。
如图可以得出但如图有两个影响:1)、地球曲率,在前面我们已经知道,地球曲率改正2)、大气折射不易确定,一般测量中把折射曲线近似看作圆弧,其平均半径为地球半径的6~7倍,则:,在这里r就是图上的f2。
通常,我们令下面求,如图,在三角形中:,当测量范围在20km以内,可以用S代替L,然后对公式做一适当的改正,进行计算。
2.4.2竖盘的构造及竖角的测定1、竖盘构造1)、构造有竖盘指标水准管,如图:竖盘与望远镜连在一起,转动望远镜是竖盘一起跟着转动;但是竖盘指标和指标水准管在一起,他们不动,只有调节竖盘水准管微动螺旋式才会移动。
通常让指标水准管气泡居中时进行读数。
竖盘自动归零装置2)、竖盘的注记形式主要有顺时针和逆时针望远镜水平,读数为90度的倍数角度。
3)、竖角的表示形式高度角a:目标视线与水平方向的夹角天顶距z:目标视线与天顶距方向的夹角2、竖角及测定定义:竖直面内目标方向与水平方向的夹角。
三角高程测量原理及公式在三角高程测量中,经常使用的仪器是全站仪和电子经纬仪。
测量步骤一般包括:设置测站、放点、观测角度、观测距离等。
水平仪原理:水平仪是一种能够检测和测量水平面的仪器。
其原理是利用液体的重力、表面张力和液面与气泡的位置关系,来确定平面的水平度。
通过测量水平仪的指示,可以帮助确定测站点的水平位置。
水准仪原理:水准仪是一种测量仪器,用于测量水平面的相对高差。
它基于物体借助重力在水平面上的运动原理。
水准仪中的测量原理包括视线法、反射法和导线法等。
在三角高程测量中,常常使用视线法,即通过望远镜观测圆n上一点的高差与水平视线的仰角。
全站仪原理:全站仪是一种同时具备测量角度和测量距离功能的仪器。
它的原理是通过发射一个激光束或红外线,并利用光电传感器接收反射光束,测量出测站点到观测点的距离和方向。
通过测量不同测站点到同一观测点的距离,以及观测点与测站点之间的角度,可以计算出观测点的高程。
余弦定理:在一个三角形中,根据余弦定理可得:c^2 = a^2 + b^2 - 2ab·cosC正弦定理:在一个三角形中,根据正弦定理可得:a/sinA = b/sinB = c/sinC高程差公式:当在一个测点上测出一物体的仰角和水平观测距离时,利用三角形的几何关系可以推导出高程差公式:h = d·sinα其中,h为物体的高程差,d为测站点到物体的水平距离,α为测站点到物体垂线与水平线之间的夹角。
综上所述,三角高程测量是一种通过测量三角形的边长和角度来推导出物体高程信息的测量方法。
其原理基于几何关系和三角函数的运算。
在实际测量中,需要使用水平仪、水准仪或全站仪等仪器,并通过测量角度和距离,应用余弦定理、正弦定理和高程差公式等公式,进行测量计算。

三角高程测量方法与误差控制指南三角高程测量是地理测量中常用的一种方法,通过测量目标地点与测量点的角度差异,计算出目标地点的高程。
在地理测绘、土地规划、建筑设计等领域中,三角高程测量具有重要的应用价值。
本文将介绍三角高程测量的主要方法及误差控制指南。
1. 三角高程测量方法1.1 前方交会法前方交会法是三角高程测量中最为常用的方法之一。
它基于测量点、目标点和参考点之间的角度关系,通过测量角度来计算高程。
在实际操作中,先选择合适的参考点,测量测量点和目标点与参考点之间的角度,再结合已知的基线长度,利用三角公式求解目标点的高程。
此方法简便易行,适用于小范围的测量。
1.2 三点测高法三点测高法是一种高精度的三角高程测量方法,适用于大范围的测量。
它利用多个参考点和观测点之间的角度关系,通过多次观测求解目标点的高程。
在实际操作中,需要选择至少三个参考点,利用三角公式计算出目标点与不同参考点之间的高程差,再取平均值作为目标点的高程。
此方法具有较高的精度,但操作复杂,适用于需要高精度测量的场合。
2. 误差控制指南2.1 观测误差控制观测误差是三角高程测量中最主要的误差来源之一。
为了保证测量结果的准确性,需要采取一系列措施来控制观测误差。
首先,应选择合适的观测仪器和设备,确保其精度符合要求。
其次,应避免在不稳定的气象条件下进行观测,如大风、降雨等天气。
此外,还应加强对观测仪器的维护与管理,保证其正常运行。
2.2 控制网设计控制网的设计对三角高程测量的精度和可靠性具有重要影响。
在设计控制网时,应根据实际测量的要求和场地条件进行合理布局。
首先,需要选择合适的观测点和参考点,保证其分布均匀、密度适宜。
其次,需要考虑地形和地貌对控制点的影响,尽量选择平坦、高程变化不大的位置作为控制点。
此外,还应合理确定控制网的形状和大小,以满足不同测量目的的需求。
2.3 数据处理与分析数据处理与分析是三角高程测量中不可或缺的环节。
在进行数据处理时,应注意对观测数据的筛查与校正,将异常值和误差数据予以排除。
全站仪三角高程测量方法全站仪是一种先进的测量仪器,具有测量水平角、垂直角和斜距的功能,因此在进行三角高程测量时,可以采用以下方法:1. 三角高程测量原理:三角高程测量是利用三角学原理进行测量的方法。
当我们在地面上选择三个测站,并测量出它们之间的水平角、垂直角和斜距时,根据三角关系可以计算出这些测站的高程。
2. 选择测站:在进行三角高程测量时,首先需要选择三个测站,并保证这三个测站之间形成一个合理的三角形。
测站的选择要考虑到其位置相对固定和稳定,同时要满足仪器观测范围的要求。
3. 测量水平角:使用全站仪测量水平角的方法有两种:反射测量和直接测量。
反射测量是将反光棱镜放置在测站上,然后使用全站仪对反射棱镜进行测量,得到水平角的数据。
直接测量是将全站仪直接对准目标,通过全站仪内置的水平角读数装置进行测量。
4. 测量垂直角:全站仪可以通过照准测量和激光测量两种方法来测量垂直角。
照准测量是将全站仪对准目标,然后通过全站仪内置的图像传感器来读取目标的中轴线,从而获得垂直角的数据。
激光测量是利用全站仪内置的激光器向目标发射激光束,然后通过在目标接收到光线的位置上读取垂直角的数据。
5. 测量斜距:通过使用全站仪的测距仪,可以实时测量出目标与测站之间的水平距离或斜距。
全站仪的测距仪可以通过使用红外线或激光技术来测量距离,并将测得的数据显示在仪器的屏幕上。
6. 计算高程:当我们完成三个测站的水平角、垂直角和斜距的测量后,可以利用三角关系计算出测站的高程。
常用的计算方法有正算法和反算法。
正算法是已知两个测站的高程和一个介于它们之间的斜距,通过三角关系计算出第三个测站的高程。
反算法是已知两个测站的高程和一个测站的高程,通过三角关系计算出这个测站到其他两个测站的斜距。
总结:全站仪的三角高程测量方法包括选择测站、测量水平角、测量垂直角、测量斜距和计算高程。
通过合理的测站选择和准确的观测操作,可以获得高精度的三角高程测量数据,从而为工程测量和地形测量提供可靠的高程数据支持。

如何利用三角高程测量法计算高度导语:三角高程测量法是一种常用的测量地理高度的方法,本文将介绍如何利用这一方法计算高度,以及该方法的原理和应用。
一、三角高程测量法的原理三角高程测量法是基于三角形的相似性原理进行计算的。
其基本原理是利用地平线距离、斜视距离和观察点与目标点的高差之间的关系,通过测量三角形的边长和角度来计算目标点的高度。
二、测量设备和要求在进行三角高程测量时,需要一些特定的测量设备和要求:1. 测绘仪器:例如全站仪、经纬仪等,用于测量角度和距离。
2. 测量杆:用于确定观测点和目标点之间的直线距离。
3. 高度测量仪:用于测量观察点和目标点的高差。
4. 精确的地理坐标:用于定位观测点和目标点的位置。
三、测量步骤三角高程测量法的具体步骤如下:1. 确定观测点和目标点的位置,并记录其地理坐标。
2. 利用测量仪器测量观测点与目标点之间的角度。
3. 利用测量杆测量观测点与目标点之间的直线距离。
4. 利用高度测量仪测量观测点和目标点的高差。
5. 根据测量得到的角度、距离和高差,应用三角形相似性原理计算目标点的高度。
四、注意事项在进行三角高程测量时,需要注意以下几个方面:1. 测量精度:为保证测量结果的准确性,应选择精度较高的测量仪器,并严格按照操作要求进行测量。
2. 大气条件:大气的湿度、温度和压力等因素都会影响测量结果,因此需要在测量过程中进行相应的校正。
3. 地形因素:地形的起伏、斜坡和植被等因素会影响视线的可见性,应充分考虑这些因素对测量的影响。
4. 测量范围:由于三角高程测量法是基于视线测量的,因此在选择目标点时需要考虑测量仪器的最大测距范围。
五、应用领域三角高程测量法广泛应用于地理测量、土地调查、工程测量等领域。
具体应用场景包括但不限于:1. 测量山体高度:可以利用三角高程测量法测量山体的高度,用于地质调查、地质灾害预警等。
2. 工程测量:利用三角高程测量法可以测量建筑物、桥梁等工程物体的高度,用于设计和施工。
三角高程测量原理三角高程测量是一种常用的地理测量方法,通过三角形的相似性原理,利用已知的角度和边长来计算未知点的高程,它在地理测量、地形测绘等领域有着广泛的应用。
三角高程测量原理的核心是利用三角形的相似性和三角函数来进行高程的计算,下面将详细介绍三角高程测量的原理。
首先,我们需要了解三角形的相似性原理。
在两个三角形中,如果它们的对应角相等,那么它们的对应边的比值也相等。
这个原理在三角高程测量中起着至关重要的作用,因为我们可以通过测量出三角形的角度和边长,来计算出未知点的高程。
其次,三角高程测量中会用到三角函数。
三角函数是一个角的函数,它包括正弦、余弦、正切等。
在三角高程测量中,我们常常会使用正弦定理和余弦定理来计算三角形的边长和角度,从而得出未知点的高程。
在实际应用中,三角高程测量通常需要借助测距仪、经纬仪等专业测量仪器来进行。
首先,我们需要选择一个已知高程的基准点作为起点,然后在目标点和基准点之间进行角度和边长的测量。
通过测量得到的数据,我们可以利用三角形的相似性原理和三角函数来计算出目标点的高程。
三角高程测量的原理虽然看似简单,但在实际操作中需要高度的精确度和专业技能。
在测量过程中,需要考虑到地形的起伏、测量仪器的精度、测量人员的技术水平等因素,以确保测量结果的准确性和可靠性。
总的来说,三角高程测量原理是地理测量中的重要方法,它通过利用三角形的相似性和三角函数来计算未知点的高程。
在实际应用中,需要借助专业的测量仪器和技术人员来进行操作,以确保测量结果的准确性和可靠性。
通过对三角高程测量原理的深入了解和实际操作,可以更好地应用于地理测量、地形测绘等领域,为相关领域的发展和应用提供有力的支持。
三角高程测量1 三角高程测量的基本原理三角高程测量是通过观测两点间的水平距离和天顶距(或高度角)求定两点间的高差的方法。
它观测方法简单,不受地形条件限制,是测定大地控制点高程的基本方法。
目前,由于水准测量方法的发展,它已经退居次要位置,但在山区和丘陵地带依然被广泛采用。
在三角高程测量中,我们需要使用全站仪或者经纬仪测量出两点之间的距离(水平距离或者斜距和高度角,以及测量时的仪器高和棱镜高,然后根据三角高程测量的公式推算出待测点的高程。
由图中各个观测量的表示方法,AB两点间高差的公式为:h=S0tanα+i1-i2 ①但是,在实际的三角高程测量中,地球曲率、大气折光等因素对测量结果精度的影响非常大,必须纳入考虑分析的范围。
因而,出现了各种不同的三角高程测量方法,主要分为:单向观测法,对向观测法,以及中间观测法。
1.1 单向观测法单向观测法是最基本最简单的三角高程测量方法,它直接在已知点对待测点进行观测,然后在①式的基础上加上大气折光和地球曲率的改正,就得到待测点的高程。
这种方法操作简单,但是大气折光和地球曲率的改正不便计算,因而精度相对较低。
1.2 对向观测法对向观测法是目前使用比较多的一种方法。
对向观测法同样要在A点设站进行观测,不同的是在此同时,还在B点设站,在A架设棱镜进行对向观测。
从而就可以得到两个观测量:直觇:hAB= S往tanα往+i往-v往+c往+r往②反觇:hBA= S返tanα返+i返-v返+c返+r返③S——A、B间的水平距离;α——观测时的高度角;i——仪器高;v——棱镜高;c——地球曲率改正;r——大气折光改正。
然后对两次观测所得高差的结果取平均值,就可以得到A、B两点之间的高差值。
由于是在同时进行的对向观测,而观测时的路径也是一样的,因而,可以认为在观测过程中,地球曲率和大气折光对往返两次观测的影响相同。
所以在对向观测法中可以将它们消除掉。
h=0.5(h AB- h BA=0.5[( S往tanα往+i往-v往+c往+r往-( S返tanα返+i返-v返+c返+r返]=0.5(S往tanα往-S返tanα返+i往-i返+v返-v往④与单向观测法相比,对向观测法不用考虑地球曲率和大气折光的影响,具有明显的优势,而且所测得的高差也比单向观测法精确。
测绘技术三角高程测量详解测绘技术在现代社会中扮演着重要的角色,其中三角高程测量作为测绘技术的重要组成部分,对于地理信息的获取和实际应用具有重要意义。
本文将对三角高程测量进行详细解析,介绍其原理、方法和应用。
一、三角高程测量的原理三角高程测量是一种基于三角形的测量方法,通过测量三角形的边长与角度来计算目标点的高程。
其基本原理是利用三角形的几何关系,根据已知边长和角度的关系求解目标点的高程。
三角高程测量的原理有两种方法,即几何三角高程测量和均差三角高程测量。
几何三角高程测量是利用定点观测和差角观测进行高程测量,其原理是通过比较观测点与已知高程点之间的角度差异,从而计算出目标点的高程。
均差三角高程测量是通过测量三角形边长和角度的变化量,利用高程差与边长、角度的关系求解目标点的高程。
二、三角高程测量的方法三角高程测量有多种方法,常用的包括:倾斜距离法、距离比例法、角度比例法、高程变换法等。
下面将对其中两种方法进行详细介绍。
1. 倾斜距离法倾斜距离法是一种适用于平地和坡地的高程测量方法,其原理是通过测量目标点与已知点之间的倾斜距离和水平距离的比值来计算目标点的高程。
该方法需要在目标点和已知点之间设置一个水平距离基线,并使用倾斜仪测量两点之间的倾斜角和倾斜距离,再根据比例关系计算出高程。
倾斜距离法的优点是测量方便快捷,适用范围广,但需要考虑目标点与已知点之间的可视性和坡度等因素对测量结果的影响。
2. 距离比例法距离比例法是一种适用于山地和复杂地形的高程测量方法,其原理是测量目标点与已知点之间的距离,并根据距离比例关系计算出目标点的高程。
该方法需要测量目标点与已知点之间的水平距离和垂直距离,并计算距离比例,再通过已知点的高程推算出目标点的高程。
距离比例法的优点是适用范围广,不受地形复杂性的限制,但需要考虑测量误差和仪器精度对结果的影响。
三、三角高程测量的应用三角高程测量在地理信息系统、地质勘探、城市规划等领域具有广泛的应用。
第十一章三角高程测量§11-1 概述一、高程控制测量的概念采用一定的方法测得高程值的控制点,叫做高程控制点。
确定一个测区内的各控制点的高程的测量工作,叫做高程控制测量。
高程控制测量的任务是在全国范围内或者一定的区域内建立高程控制网,精确测定控制点的高程,为各种比例尺地形测图、工程测量、研究地球的形状和大小等提供数据。
二、高程控制测量的方法进行高程控制测量的方法,常规方法有水准测量和三角高程测量。
目前还有GPS 定位方法,但其高程测量的精度低,可满足某些低精度要求的工程需要。
三、高程控制测量的等级划分高程控制测量的等级分为国家级和国家以下级。
国家级分为一、二、三、四等。
国家以下级的高程控制测量的等级划分方法,现行的不同测量规范具体划分方法不完全一样,工作中应以所采用的规范版本为准。
四、高程控制测量的其它问题1、布网原则与平面控制网的布网原则一样,也必须遵循先整体,后局部;从高级到低级,逐级布网、逐级控制的原则。
2、布网方法以《水利水电工程测量规范》为例,在地形测图及普通工程测量中,高程控制一般按三级布设:①、基本高程控制(四等或四等以上水准测量)。
②、加密高程控制(五等水准测量及三角高程测量)。
③、测站点高程。
3、高程系统:现在应采用1985国家高程基准。
但在实际工作中,有可能采用以1956年黄海平均海水面为起算面的国家高程系统,甚至还可能采用独立高程系统(也称假定高程系统),对此,必须在抄录起算数据时及工作过程中特别注意。
4、网形①、水准网或单一水准路线。
②、三角高程网或单一三角高程路线。
本课程重点研究单一水准路线和单一三角高程路线的施测方法。
对于水准网和三角高程网的内、外业,将在《测量平差基础》和《大地测量学》(下册)中详细介绍,本课程不予深入、全面研究。
关于水准测量的施测方法,在第二章中已经讲过。
下面,仅介绍单一三角高程路线的施测方法和要求。
三角高程测量适用于大丘陵测区、山区及水网、沼泽测区进行高程控制。