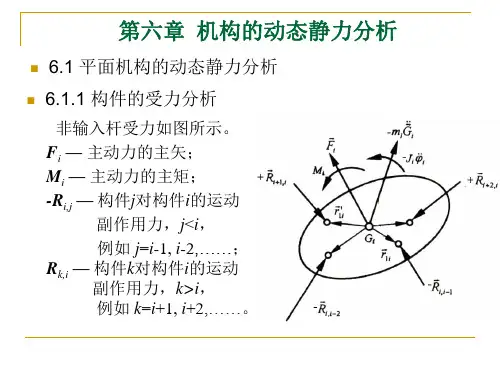
6.1平面机构的动态静力分析
- 格式:ppt
- 大小:1.01 MB
- 文档页数:46
平面机构的力分析、机械的摩擦与效率(总分100,考试时间90分钟)一、填空题1. 作用在机械上的力按作用在机械系统的内外分为______和______。
2. 作用在机械上的功按对机械运动产生的作用分为______和______。
3. 机构动态静力分析时,把______视为一般外力加在机构构件上,解题的方法、步骤与静力分析完全一样。
4. 用速度多边形杠杆法可以直接求出作用在任意构件上的未知平衡力(平衡力矩),此方法的依据是______原理。
5. 运动链的静定条件为______,______。
6. 矩形螺纹和梯形螺纹用于______,而三角形(普通)螺纹用于______。
7. 机构效率等于______功与______功之比,它反映了______功在机械中的有效利用程度。
8. 移动副的自锁条件是______,转动副的自锁条件是______,螺旋副的自锁条件是______。
9. 从效率的观点来看,机械的自锁条件是______;对于反行程自锁的机构,其正行程的机械效率一般小于______。
10. 槽面摩擦力比平面摩擦力大是因为______。
11. 提高机械效率的途径有______,______,______,______。
12. 机械发生自锁的实质是______。
二、选择题1. 传动用丝杠的螺纹牙形选择______。
A.三角形牙 B.矩形牙 C.三角形牙和矩形牙均可2. 单运动副机械自锁的原因是驱动力______摩擦锥(圆)。
A.切于 B.交于 C.分离3. 如果作用在轴颈上的外力加大,那么轴颈上摩擦圆______。
A.变大 B.变小 C.不变 D.变大或不变4. 机械出现自锁是由于______。
A.机械效率小于零B.驱动力太小 C.阻力太大 D.约束反力太大5. 两运动副的材料一定时,当量摩擦因数取决于______。
A.运动副元素的几何形状 B.运动副元素间的相对运动速度大小 C.运动副元素间作用力的大小 D.运动副元素间温差的大小6. 机械中采用环形支承的原因是______。
【关键字】分析第四章平面机构的力分析§4-1机构力分析的目的和方法1、作用在机械上的力驱动力:∠VS锐角(驱动力→原动力)作功生产阻力(有效阻力)(+、-)阻力: ∠VS钝角有害阻力常见的作用力:原动力、摩揩力、运动副反力、重力、“惯性力”2、机构力分析的目的和方法影响及其运动的动力性能→运转性能、调速、平衡、振动、功率分析力(力矩)后续机械设计重要参数→尺寸、机构、强度确定运动副反力→ 强度、摩揩磨损、效率任务(目的)确定机构的平衡力(或平衡力矩)→原动机功率?克服生产阻力?§4-2构件惯性力的确定假设已知构件质量、转动惯量(实际设计中可采用类比法,初估计,再逐步修正)及运动参数。
1、做平面复合运动构件两者可合二为一:力偶等效原理2、做平面移动构件3、绕定轴转动构件§4-3质量代换法1、静代换问题求解任取B、C为代换点:解得:代换质量2、动代换问题的求解解得结论:1)静代换简单容易,其代换点B、C可随意选取。
2)动代换只能随意选定一点,另外一点由代换条件确定。
3)使用静代换,其惯性力偶矩将产生误差:4)§4-3用图解法作机构的动态静力分析(不考虑摩揩力)(达朗贝尔原理在机构力分析中的应用)1、机构组的静定条件“未知力数目”= 平衡方程数目结论:1)求一个低副反力,需求解两个未知量,而高副则只需一个。
故有静定条件:即:仅有低副时:2)杆组即是静定结构。
(杆组中不含有未知的外力一定可求解)2、机构的动态静力学分析例题4-1 往复式运输机构简图及受力情况。
求应加在1构件上X—X方向上的平衡力。
(图、解)解:1、作出机构简图并作出运动分析2、确定各构件中的惯性力(矩),将其加在机构上3、 取出构件4、5进行力分析 平衡方程图解→45R 、65R的大小4、 取出构件2、3进行力分析2构件对C 点取矩,→求出τ12R 3构件对C 点取矩,→求出τ63R对2、3构件组有:图解可解出→n R 63 、n R 12的大小5、取构件2可直接求出32R6、取构件1(三力汇交)有:图解可解出:→b P 、61R的大小补充:茹可夫斯基杠杆法茹可夫斯基杠杆法是求解平衡力的一种简易方法,不必求运动副反力。