装载机工作装置的建模与仿真分析_段楠
- 格式:pdf
- 大小:693.25 KB
- 文档页数:3

摘要基于Pro/E的装载机工作装置的实体建模及运动仿真摘要:装载机是一种应用广泛的工程机械。
有其广泛的空间,但由于装载机传统开发模式存在的开发周期长、过程繁杂、开发成本高、性能测试困难等问题,本文将仿真技术引入装载机开发领域,完成以下工作:1.介绍了装载机的发展历史及前景,装载机的种类,介绍了仿真技术产生的背景、在国内的发展状况以及仿真技术的实际意义。
2.对液压缸作出了合理的选择。
3.简述了Pro/E软件在工程设计中的应用,利用Pro/E构建装载机的三维实体模型,并对其进行装配,在Pro/E 环境下进行了装配干涉检验。
4.在Pro/ENIEER MECHANISM环境下进行运动仿真,得出装载机工作的性能曲线。
关键字:装载机工作装置液压缸仿真技术三维建模Abstract:Loader is a kind of engineer machine that is widely applied in engineer project, which has wildely space, Aim to the problems that exist in traditional research way of loader, for example the research cycle is long, the cost is long, the cost is high and the performance test is complex etc, this paper leads virtual prototype technology into research of loader. The following research works are completed:1.The development foreground, the category and loader’s history is introduced, also the background of simulationtechnology come into being, developing status in local and the significance of virtual prototype technology is introduced.2.To brief introduce the Pro/E software which application in the field of engineering, the 3D modeling is used byPro/E software, which is built and interferential test of assembly in Pro/E environment is completed.3.The simulated motion in Pro/E environment is completed, and the capability curve is reached.4. A rational choice for the hydraulic actuating cylinder.Keywords: Loader, Working mechanism, hydraulic actuating, Simulation technology, 3D modeling目录摘要 (I)1 前言 (1)1.1 装载机的简介 (1)1.1.1 装载机的发展历史及前景 (1)1.1.2 装载机的种类 (1)1.1.3 本章小结 (3)1.2 运动仿真技术简介 (4)1.2.1 运动仿真技术产生的背景 (4)1.2.2 运动仿真技术 (4)1.2.3运动仿真技术在国内外的发展概况 (4)1.2.4 发展运动仿真技术的重要意义 (4)1.2.5 总结 (5)1.3 Pro/ENGINEER软件在工程设计中的应用 (5)1.3.1 Pro/ENGINEER软件介绍 (5)1.3.2 运动仿真技术对装载机设计理念的影响 (6)1.4 本章小结 (7)2 液压缸的选择 (8)2.1 本章小结 (8)3 装载机工作装置三维实体建模 (9)3.1 工作装置零件建模 (9)3.1.1 动臂的生成 (9)3.1.2 铲斗的生成 (10)3.1.3 底座的生成 (11)3.1.4 连杆的生成 (11)3.1.5 摇臂的生成 (12)3.1.6 液压缸筒的生成 (12)3.1.7 液压缸盖的生成 (13)3.1.8 液压缸活塞的生成 (13)3.1.9 连接销轴的生成 (13)3.2 工作装置装配模型建模 (14)3.2.1 底座模型装配 (15)3.2.2 动臂模型装配 (15)3.2.3 铲斗模型装配 (16)3.2.4 液压缸体模型装配 (16)3.2.5 摇杆模型的装配连接 (17)3.2.6 连杆模型与铲斗模型和摇杆模型的装配连接 (17)3.2.7 销钉模型的连接 (17)3.2.8 本章小结 (20)4 装载机工作装置运动仿真 (21)4.1 概述 (21)4.2 创建装载机工作装置的机械运动仿真 (21)4.2.1 连接轴设置 (21)4.2.2 创建快照 (22)4.2.3 定义伺服电动机................................................................................. 错误!未定义书签。
装载机工作装置建模与动态分析摘要现如今,在各种类型的工程机械中,应用尤为广泛的即为装载机,其将可有效提高现有的工程进度,并尽可能降低不必要的劳动强度,持续优化当前的工程质量。
本次研究用Z30E型装载机作为研究对象,使用solidworks三维建模软件创建了装载机工作装置各构件的零件图并用自带的装配功能将各构件装配成完整的工作装置。
在此之后,本文借助于ANSYS有限元分析软件的作用,对装载机的动臂进行科学合理的有限元分析。
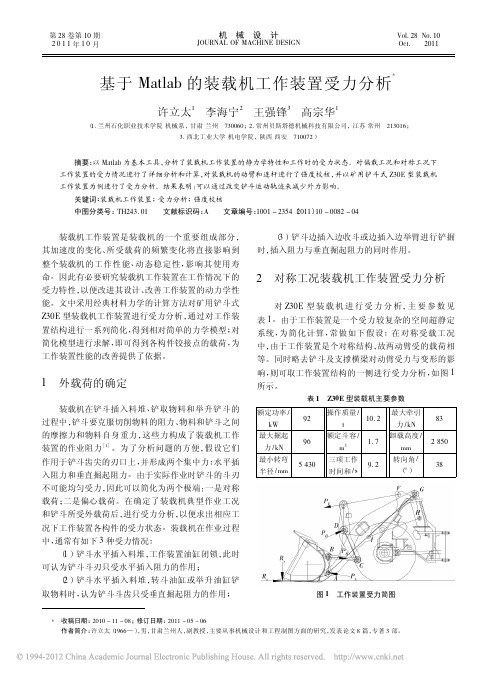
在本篇论文中,决定将研究对象设定为Z30E装载机,并对其所应满足的设计要求,进行较为深入的细致阐述。
其次,据此成功构建出相匹配的反转六杆机构模型,并由此针对装载机铲斗以及摇臂等部分,进行科学得当的受力分析。
最后,本文主要针对动臂以及连杆等构件,进行精准有效的强度校核。
用solidworks创建工作装置的三维模型时先简单介绍了三维机械设计软件solidworks。
之后用solidworks的简单功能创建了装载机工作装置主要构件铲斗、动臂、摇臂和连杆的三维模型,并使用装配功能将各构件装配成一个统一的工作装置整体。
以动臂为例,若其达到高度的极小值,则将可进行一系列有限元分析。
此时,仅需将动臂模型融于ANSYS软件中,并在ANSYS中划分网格,再向其赋予一定的载荷,即可针对模型进行科学精准的求解和细致分析,并由此获得应力云图以及相应的位移云图。
据此将可得知,应力的极大值将可达到174MPa,在动臂与举臂油缸铰接处,位移最大值为0.00701m,在动臂的横梁中部处。
在本篇论文中,主要针对装载机所涉及的多样化构件,进行科学合理的受力分析,再据此成功构建出相匹配的三维模型,此外还针对动臂构件进行必要的有限元分析,并由此找出动臂应力值最大的点,对工作装置的优化设计,改善性能等将会有很大帮助。
而且利用计算机可以直接显示出动臂的彩色应力云图和位移云图。
这样复杂的装载机空间应力问题就迎刃而解了。
关键词:装载机;工作装置;建模;有限元分析第1章绪论1.1轮式装载机简介装载机隶属于典型的铲土运输机械装置,这种设备的前端配置了铲斗支撑件以及相应的连杆,相关的随机装置能够前向运动,并能进行多种作业,譬如上提、挖掘、装载、卸载与运输等,其在建筑以及矿山等各种类型的工程建设领域中应用较为广泛。
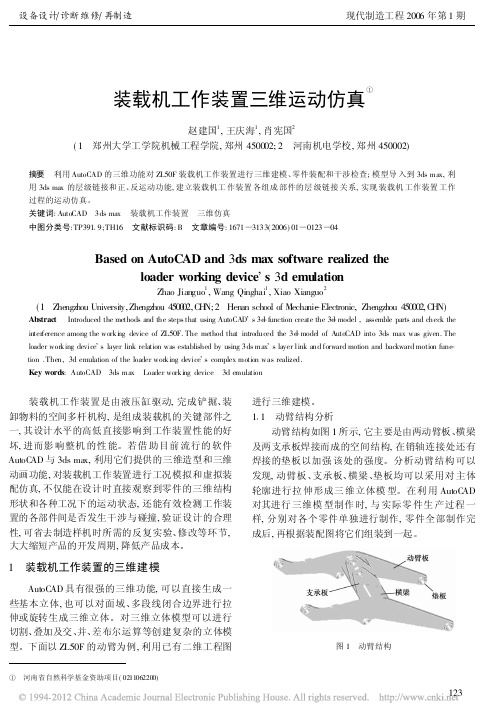
装载机工作装置三维运动仿真¹赵建国1,王庆海1,肖宪国2(1郑州大学工学院机械工程学院,郑州450002;2河南机电学校,郑州450002)摘要利用AutoCAD的三维功能对ZL50F装载机工作装置进行三维建模、零件装配和干涉检查;模型导入到3ds max,利用3ds max的层级链接和正、反运动功能,建立装载机工作装置各组成部件的层级链接关系,实现装载机工作装置工作过程的运动仿真。
关键词:AutoCAD3ds max装载机工作装置三维仿真中图分类号:TP39119;TH16文献标识码:B文章编号:1671)3133(2006)01)0123)04Based on AutoCAD and3ds max software realized theloader working device.s3d emu lationZhao Jianguo1,Wang Qinghai1,Xiao Xianguo2(1Zhe ngzhou University,Zhe ngzhou450002,C H N;2Henan school of Mecha nic-Electronic,Zhe ngzhou450002,C H N) Abstract Introduced the methods and the steps that using AutoCAD.s3d-function create the3d-model,assemble parts and check the in terference among the worki ng device of ZL50F.The method that introduced the3d-model of AutoCAD into3ds max was given.The loader working device.s layer link relation was established by using3ds max.s layer link and forward motion and backward motion func-tion.Then,3d emulation of the loader working device.s complex motion was realized.Key words:AutoCAD3ds max Loader worki ng device3d emulation装载机工作装置是由液压缸驱动,完成铲掘、装卸物料的空间多杆机构,是组成装载机的关键部件之一,其设计水平的高低直接影响到工作装置性能的好坏,进而影响整机的性能。
XXXX大学本科毕业设计(论文)学院专业机械设计制造及其自动化学生姓名班级学号指导教师二零年月XXXX大学本科毕业论文ZL50G式轮式装载机工作装置的虚拟设计和三维仿真The type of ZL50G wheel loader working device virtual design and three-dimensional simulation完整的毕业设计过程ProE 三维建模,包括零件,装配图以及运动仿真这里贴上转载机CAD图该毕业设计成果经过严格而完整的毕业答辩过程,并取得优秀。
如有需要可以联系 球球983091293(理工类):X X X X大学毕业论文(设计)任务书学院:专业:机械设计制造及其自动化学号:姓名:指导教师:职称:20 年月日毕业设计(论文)题目:ZL50G式轮式装载机工作装置的虚拟设计和三维仿真一、毕业设计(论文)内容及要求(包括原始数据、技术要求、达到的指标和应做的实验等)1、了解ZL50G轮式装载机的基本机构及工作原理。
2、了解装载机的工况条件完成其工作装置总体方案的选择,例如总体结构与布置、连杆机构的结构形式等。
3、完成装载机工作装置的设计,包括铲斗设计、工作装置连杆系统设计等。
4、对装载机工作装置进行三维建模和运动仿真。
二、完成后应交的作业(包括各种说明书、图纸等)1. 毕业设计论文一份(不少于1.5万字);2. 外文译文一篇(不少于5000英文单词);3. 装配图一张及零件图若干。
三、完成日期及进度自20 年3 月25日起至20 年6月14日止进度安排:1. 3月25日~4月7日:查阅资料、调研,完成开题报告;2. 4月8日~4月28日:完成方案确定和机构设计;3. 4月29日~5月20日:完成零件设计计算及总图4. 5月21日~6月10日:完成造型及仿真,撰写毕业设计论文。
5. 6月10日~6月14日:答辩。
四、同组设计者(若无则留空):五、主要参考资料(包括书刊名称、出版年月等):1、杨占敏等,轮式装载机[M],北京:化学工业出版社,2006.12、吉林工业大学工程机械教研室编,轮式装载机的设计[M],北京:工业建筑出版社,19823、汤宗和,装载机工作装置连杆机构的图解设计法,北京:工程机械,19844、潘科第童仲良,装载机的构造、使用及维修,北京:机械工业出版社,19935、成大仙等著.机械设计手册 [M].化学工业出版社,2004.16、吴宗泽主编.机械设计实用手册.北京:化学工业出版社,2003.67、朱龙根.《简明机械零件设计手册》.机械工业出版社,1997.11系(教研室)主任:(签章)年月日学院主管领导:(签章)年月日注:1、如页面不够可加附页2、以上一~五项由指导教师填写摘要装载机是铲土运输机械类中的一种,常见的装载机有自行式履带装载机和轮胎式装载机,装载机主要由工作装置、动力系统、传动系统、制动系统、行走系统、液压系统、电气系统等组成。
第1章ZL50轮式装载机的工作装置设计1.1 ZL50轮式装载机的工作装置设计要求1.1.1 概述装载机工作装置主要由铲斗和支持铲斗进行装在作业的连杆系统组成,依靠这套装置装载机可以对汽车,火车进行散料装载作业,也可以对散料进行短途运输作业,还可以进行平地修路等作业。
把铲斗更换成专门的装置,还可以进行其他装载作业。
装载机工作装置的结构和性能直接影响整机的工作尺寸和参数,因此,工作装置的合理性直接影响装载机的生产效率、工作负荷、动力与运动特性,不同工况下的作业效果、工作循环时间、外形尺寸和发动机功率等。
轮式装载机工作装置有多种形式,根据杆数和运动特征可分为正转四杆、正转五杆、正转六杆、反转六杆、正转八杆等。
本次设计研究的是反转六连杆机构,这种机构形式简单、尺寸紧凑。
当铲斗铲掘物料时由于是反转机构,转斗油缸大腔进油工作,可以获得较大的铲掘力。
也就是说,铲起同样重量的物料,转斗油缸的尺寸可以设计得较小。
而且转斗油缸后置,使司机有较好的视野。
反转六连杆机构尤其多用于中小型装载机工作装置,我国生产的ZL系列轮式装载机工作装置多采用这种形式。
图1-1 反转六连杆机构轮式装载机的工作装置由铲斗、连杆(或托架)、摇臂、动臂、转斗油缸、动臂油缸组成。
这个机构实质是两个四杆机构。
图1-2 轮式装载机的工作装置1.1.2 轮式装载机工作过程轮式装载机是一种铲、装、运、卸一体化的自行式设备,它的工作过程由六种工况组成。
○1插入工况动臂下放,铲斗放置于地面,斗尖触地,斗底板与地面呈3°~5°倾角,开动装载机,铲斗借助机器的牵引力插入料堆。
○2铲装工况铲斗插入料堆后,转动铲斗铲取物料,待铲斗翻至近似水平为止。
○3重载运输工况铲斗铲装满物料后举升动臂,将铲斗举升至运输位置(即铲斗斗底离地高度不小于机器的最小允许离地间隙),然后驱动机器驶向卸载点。
○4举升工况保持转斗缸长度不变,操作举升油缸,将动臂升至上限位置,准备卸载。
建模与仿真课程的实验教学探索宋世领;张孝琪;胡焕玲;韦婷婷【期刊名称】《装备制造技术》【年(卷),期】2022()5【摘要】建模与仿真课程是工业工程专业高年级学生的一门专业必修课,该课程主要通过计算机仿真软件对复杂动态随机系统进行建模和分析,以评价系统的运行状态,寻找系统的短板,优化系统的性能。
建模与仿真课程具有理论与实践融合、以实践为主的特点。
在建模与仿真的课时分配中,理论与实验课时的比例大概为1∶2,实验部分教学在建模与仿真课程教学中尤为重要。
通过总结建模与仿真课程多年的教学经验,结合和多届工业工程学生的访谈情况,发现目前建模与仿真课程的实验教学存在如下问题:课程实验平台存在短板,实验内容存在结构性问题;实验教学模式呆板单一,难以激发学生学习兴趣;实验考核方式效率低下,无法有效反映学生的实际能力。
针对上述3方面的问题,提出了跳出实验平台安排实验课程、构建“以学生为中心,以问题为动力”的实验教学模式、构建建模与仿真实验的“全面考核方式”等实验教学改革思路。
旨在通过改革实验课程的教学方法和思路来强化学生对理论知识的掌握,同时增强学生解决实际问题的能力,培养学生的创新思维和团队协作意识。
【总页数】3页(P182-183)【作者】宋世领;张孝琪;胡焕玲;韦婷婷【作者单位】华南农业大学数学与信息学院;安徽工程大学经济与管理学院【正文语种】中文【中图分类】G642.0【相关文献】1.工业工程专业《生产系统建模与仿真》课程实验教学探究2.空中交通管理系统建模与仿真课程实验教学探讨3.地下工程实验教学虚拟仿真数值建模平台建设探索4.系统建模与仿真课程实验教学探讨5.“物流系统建模与仿真”课程混合式实验教学探索——基于OBE教育理念因版权原因,仅展示原文概要,查看原文内容请购买。