AUTOSAR OS调度表同步的优化设计
- 格式:pdf
- 大小:267.27 KB
- 文档页数:3

同步测控系统时间标定与同步优化策略同步测控系统在各个领域中起着至关重要的作用。
在实际应用中,确保系统的时间标定准确可靠,并采取合适的同步优化策略,对于获得精确的测量数据和实时控制至关重要。
本文将探讨同步测控系统时间标定的重要性,并提出一些同步优化策略。
一、同步测控系统时间标定的重要性同步测控系统中的时间标定对于确保数据的准确性至关重要。
在测控系统中,不同的传感器和执行器需要与控制器进行实时的数据交互。
如果时间标定不准确,可能导致传感器数据的延迟或错位,进而影响系统的测量和控制精度。
因此,准确标定系统时间是确保测控系统可靠运行的基础。
为了实现同步测控系统的时间标定,可采用以下策略:1. 硬件时间标定策略硬件时间标定策略通过使用高精度的时钟模块来标定系统时间。
一种常用的方法是使用GPS接收机来获得精确的时间信号,并与系统内部时钟进行同步。
这种策略能够提供高精度的时间标定,保证了系统数据的准确性。
2. 软件时间标定策略软件时间标定策略通过对数据传输延迟进行校正来实现时间同步。
在系统中,通过测量数据从传感器到控制器的传输时间,并考虑通信延迟和处理时间等因素,可以对系统时间进行校正。
这种策略对于无法使用硬件标定的系统具有较好的适用性。
二、同步测控系统的时间同步优化策略除了时间标定外,同步测控系统还需要优化时间同步策略,以实现更高的同步精度。
以下是一些常用的时间同步优化策略:1. 时间同步协议的选择在同步测控系统中,选择合适的时间同步协议至关重要。
常见的时间同步协议包括NTP(网络时间协议)和PTP(精确时间协议)。
NTP适用于对时间同步要求不是特别高的应用场景,而PTP则适用于对时间同步精度要求较高的场景。
2. 网络延迟的优化网络延迟是影响同步测控系统时间同步精度的重要因素之一。
为了降低网络延迟,可以采用一些优化策略,如使用高速网络设备、优化网络拓扑结构、增加网络带宽等。
3. 时间补偿算法的优化在同步测控系统中,时间补偿算法对于实现精确的时间同步至关重要。

同步测控系统卫星时间同步技术优化设计随着科技的迅速发展,卫星技术在各个领域中起着重要的作用。
在同步测控系统中,卫星时间同步技术是实现测控系统稳定运行的关键因素之一。
本文将围绕同步测控系统卫星时间同步技术的优化设计展开讨论。
1. 引言同步测控系统是一种用于监测和控制各种设备的系统,它通常由多个终端设备组成。
为了确保系统内各个设备的时间一致性,卫星时间同步技术被广泛应用于同步测控系统中。
然而,现有的卫星时间同步技术在某些方面还存在一些不足之处,因此需要进行优化设计。
2. 传统卫星时间同步技术存在的问题传统的卫星时间同步技术主要包括GPS同步和卫星天线同步。
然而,这些技术在以下几个方面存在一些问题:2.1 定位精度不高GPS同步技术是通过接收GPS卫星的信号来实现时间同步的,但是由于地球上存在信号遮挡或多径效应,导致GPS的定位精度受到影响,从而使得时间同步的精度下降。
2.2 受天气影响大卫星天线同步技术的工作原理是通过接收地面站和卫星之间的信号来实现时间同步的。
然而,由于天气的不确定性,如暴风雨、大雪等恶劣天气,会导致信号受到干扰或者中断,从而无法正常进行时间同步。
3. 技术优化设计方案为了解决传统卫星时间同步技术存在的问题,我们可以采取以下技术优化设计方案:3.1 多源时间同步传统的卫星时间同步技术通常只依赖于单一的时间源,如GPS信号或卫星天线信号。
为了提高同步的准确度,可以引入多源时间同步技术,通过同时使用多种信号源进行时间同步,以提高时间同步的精度和可靠性。
3.2 引入校准算法在时间同步过程中,由于各种因素的影响,如信号传播延迟、设备间的传输延迟等,会导致时间同步的误差。
为了降低误差,可以引入校准算法,根据传输延迟和传播延迟等信息,对时间同步进行校准,从而提高时间同步的精度。
3.3 频率同步技术的应用除了时间同步,对于一些需要进行频率同步的应用场景,如通信系统和信号处理系统等,可以引入频率同步技术,通过同步频率信号来确保系统内各个设备的频率一致性。
同步测控系统实时性能设计与优化同步测控系统是一种广泛应用于科学研究、工程控制等领域的实时控制系统。
在设计和优化同步测控系统的过程中,实时性能是一个至关重要的考虑因素。
本文将探讨同步测控系统实时性能的设计与优化方法,帮助读者实现高效的系统运行。
一、实时性能设计的重要性同步测控系统是一种基于实时数据采集、处理和控制的系统。
系统的实时性能直接影响到数据采集和控制的准确性和稳定性。
因此,实时性能设计对于系统的可靠运行至关重要。
二、系统结构的优化同步测控系统的实时性能设计要从系统结构的角度出发进行优化。
首先,需要明确系统的功能需求和实时性能指标,根据实际情况选择合适的硬件平台和通信协议。
其次,合理划分系统的模块结构,将任务分配到不同的硬件模块上进行并行处理,以提高系统的响应速度和处理能力。
最后,优化系统的数据传输机制和缓存策略,减少数据传输延迟和丢失率。
三、任务调度算法的优化同步测控系统通常需要处理大量的任务,任务调度算法的设计决定了系统的任务执行顺序和优先级。
为了提高系统的实时性能,可以采用以下优化方法:1. 静态优先级调度算法:静态优先级调度算法是一种基于任务优先级确定任务执行顺序的算法。
通过合理设置任务的优先级,可以确保关键任务得到优先处理,提高系统的实时性能。
2. 动态优先级调度算法:动态优先级调度算法是一种根据任务的实时性要求实时调整任务优先级的算法。
通过动态调整任务的优先级,可以根据系统实时性能的变化情况,灵活调度任务的执行顺序,提高系统的实时性能。
四、数据采集和传输的优化同步测控系统的实时性能与数据的采集和传输密切相关。
为了提高系统的实时性能,可以采用以下优化方法:1. 多线程数据采集:将数据采集任务分散到多个线程进行并行处理,提高数据采集的效率和实时性。
2. 数据压缩和重传机制:采用数据压缩算法对采集的数据进行压缩,减少数据传输的带宽占用,降低传输延迟。
同时,引入重传机制,保证数据传输的可靠性和实时性。
AUTOSAR调度表同步作者:邓孔宏1.1调度表同步调度表上的初始溢出点在哪一个绝对时间被处理由用户控制。
然而,如果调度表重复,那么不保证第一个被处理的初始溢出点所在的绝对计数值与后面的被处理的初始溢出点所在的计数值相同。
这是因为调度表的持续时间不需要等于计数器系数。
在很多情况下,调度表溢出点在特定的绝对的底层计数器值上被处理是非常重要的。
而这就叫做“调度表同步”。
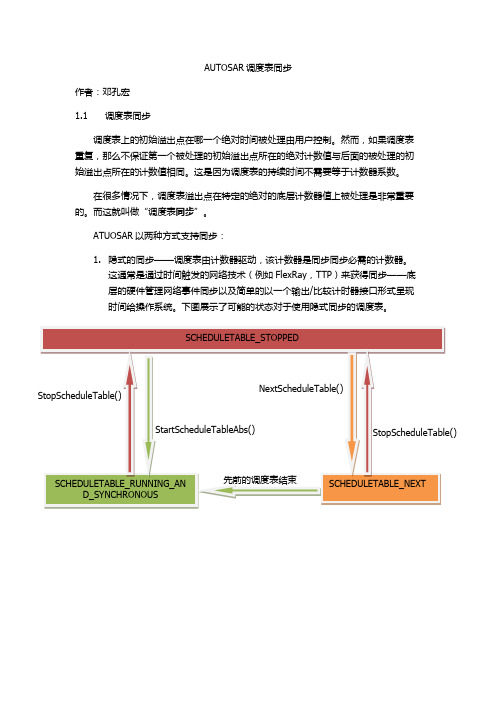
ATUOSAR以两种方式支持同步:1.隐式的同步——调度表由计数器驱动,该计数器是同步同步必需的计数器。
这通常是通过时间触发的网络技术(例如FlexRay,TTP)来获得同步——底层的硬件管理网络事件同步以及简单的以一个输出/比较计时器接口形式呈现时间给操作系统。
下图展示了可能的状态对于使用隐式同步的调度表。
2.显示的同步——调度表由操作系统计数器驱动,该计数器不是同步必需的计数器。
操作系统提供额外的功能去保持由操作系统计数器驱动的调度表同同步的计数器同步。
这通常通过周期性的广播全局时间来实现同步。
下图展示了这样的调度表的状态。
SWS_OS_00013:操作系统模块应该提供能力去同步调度表到已知计数器值的处理。
1.1.1隐式的同步操作系统模块不提供一个额外的支持给调度表隐式的同步。
然而,有必要去约束调度表的配置和运行时控制以便在配置的调度表上的tick同计数器上的tick对齐。
这要求调度表的范围与计数器的范围完全相同。
SWS_OS_00429:操作系统模块的隐式同步的调度表应该有一个等于它相关联的AUTOSAR OS计数器的OsCounterMaxAllowedValue+1的持续时间。
为了同步调度表的处理,调度表应该在一个已知的计数器值被启动。
这意味着要求隐式同步的一个调度表必须只能在一个绝对的计数器值上启动,而不能在相对的计数器值上被启动。
SWS_OS_00430:操作系统模块应该阻止一个隐式同步的调度表在一个相对的计数值上被启动。

AUTOSAR Classic Platform(CP)中的时间同步机制详解摘要在现代汽车电子电气架构中,尤其是在自动驾驶和高级驾驶辅助系统(ADAS)领域,精准的时间同步对于确保分布式ECU(电子控制单元)之间的协同工作至关重要。
AUTOSAR Classic Platform(CP),作为汽车开放系统架构的标准之一,提供了一套全面的时间同步解决方案以满足这一需求。
本文将详细介绍AUTOSAR CP中实现时间同步的核心机制、组件及其实现原理。
一、时间同步的重要性在复杂的分布式车载网络中,各个ECU需要基于精确的全局时间来执行相应的任务,例如传感器数据融合、控制算法执行以及与其他节点的数据交换。
时间同步可避免因时间差异导致的决策错误或系统性能下降,从而保障车辆的安全性和可靠性。
二、AUTOSAR CP时间同步模块——StbM (Timing Stub Master)AUTOSAR CP通过其内置的时间同步模块StbM来管理并实现整个系统内的时钟同步。
StbM模块是所有依赖于时间信息的应用软件组件(SWC)与硬件时间源之间的接口。
1. 全局时间获取与传播- StbM从高精度的时间源(如GPS接收器或其他可靠的时间基准)获取全局时间,并负责将其通过车载网络(如CAN、FlexRay或Ethernet)分发至各个ECU。
- 每个ECU上的StbM模块接收到全局时间后,会根据所采用的时间同步协议(如CanTSync或EthTSync)进行本地时间校准。
2. 时间戳记录与偏移计算- 在接收到全局时间消息的同时,StbM模块会记录下当时的本地时间戳。
- 通过对比全局时间和对应的本地时间戳,StbM能够计算出本地时钟与全局时钟之间的偏差,并据此调整本地时钟频率,实现时间同步。
3. 多跳同步与网络拓扑适应性- 在复杂的网络环境中,StbM支持多跳同步,即即使不是直接连接到主时间源的ECU也能间接实现时间同步。
- 同时,StbM设计时充分考虑了不同车载网络拓扑结构的特点,可以灵活地适应星型、树型、环型等各种网络结构。
基于AUTOSAR 标准的TCU 软件设计随着AUTOSAR 标准逐渐成为未来汽车软件架构的主流,作为汽 车电子核心部件的双离合变速箱控制单元(Transmission Control Unit, TC ∪),也将在今后的软件开发中遵循该标准。
因此,作者在系统地 分析AUTOSAR 标准及开发方法的基础之上,研究了如何在TCU 平台 上设计符合AUTOSAR 标准的应用层软件系统架构、软件组件以及接 口层配置,其中,重点阐述了应用层软件组件的设计方法。
1. AUTOSAR 架构 基于TCU 的系统需求,作者设计了符合AUTOSAR 架构的TCU 软 件系统架构,如图1所示。
操作系统殄断管理 内存管理Jl系统(DEM) (MCmory) (COM)I (GPJO) (OS)微控制器(MiCrO Controller)同步㈱控制(GcarControI)信号解析和传输tput)自适应学习(AdaPtiOe LCarn)诊断及信号处理(Dia^nois ∖Signal Process)协调控制—CtAuxiIiary Coordinator—TT^应用层软件组件(ASW)电子泵控制Motor Control}I I J(RTE)(CDD) 基础软 件层(BSW)图1 AUTOSAR 软件架构为了实现软件功能的复用和标准化,AUToSAR 定义了层次化、模块化的体系架构,划分为以下3个模块:1.1应用软件层SWC应用层代表着汽车电子软件中最核心的功能,控制功能设计都在这一层进行。
应用层最基本的组成是软件组件SWC ( Software Component),包括图1中的信号处理、离合器控制、协调控制、同步器控制、电子泵、自适应学习等功能组件。
每个SWC都封装了单个或多个运行体(RUnnableS),并通过实时环境实现软件组件之间的通信、系统功能调用以及TCU硬件资源的访问。
1.2实时环境RTE如图1中的链接线,RTE ( Runtime Environment)实现了应用层软件与底层基础软件之间的分离,上层的每个SWC都与RTE交互,使得数据与事件传递到其他各个模块。
autosar操作系统调度表原理Autosar操作系统(AUTOSAR OS)是汽车电子领域中广泛应用的一种操作系统。
调度表是AUTOSAR OS的核心机制之一,用于管理任务的执行顺序和时间。
本文将介绍AUTOSAR OS调度表的原理和工作方式。
AUTOSAR OS任务调度表是一个数据结构,用于存储和管理系统中所有任务的属性和调度信息。
调度表是AUTOSAR OS内部的重要组成部分,它包含了任务的优先级、任务的状态、任务的堆栈指针等信息。
调度表中的任务按照优先级从高到低排列,具有较高优先级的任务会先被调度执行,而具有较低优先级的任务会在较高优先级任务没有工作可执行时才被调度。
AUTOSAR OS对任务的调度基于优先级抢占式机制,优先级较高的任务可以打断正在执行的较低优先级任务。
AUTOSAR OS的调度算法是基于静态优先级的固定优先级算法,在任务创建的时候为每个任务指定一个静态优先级,优先级范围从0到255。
静态优先级由应用程序开发人员根据任务的紧急程度和重要性来分配。
具有相同静态优先级的任务称为同一优先级任务。
AUTOSAR OS调度表的工作原理如下:1. 初始化:在系统启动时,AUTOSAR OS会根据预定义的调度表配置信息,初始化调度表,并为每个任务分配所需的堆栈空间。
2. 任务创建:当应用程序创建新任务时,AUTOSAR OS会将该任务的信息添加到调度表中,包括任务的优先级、任务的入口函数、任务的堆栈空间等。
3. 任务调度:AUTOSAR OS会根据任务的优先级和调度策略,选择最高优先级的任务进行执行。
当一个任务的执行时间片用完或者被更高优先级的任务抢占时,AUTOSAR OS会保存该任务的上下文,并从调度表中选择下一个要执行的任务。
4. 任务切换:当AUTOSAR OS决定切换到另一个任务时,它会保存当前任务的上下文,并加载下一个任务的上下文,然后继续执行下一个任务。
任务切换是通过在调度器中进行上下文切换来实现的。
AUTOSAR调度表
作者:邓孔宏
1.1 调度表
通过使用一个AUTOSAR计数器和一系列自动启动的报警器可以实现一个静态定义的任务激活机制。
最简单的情况是,通过规定“一旦启动就不可更改的报警器”获得静态定义的任务激活机制。
而想要在运行时修改,只能在报警器之间相关的同步能够得到保证时完成。
这通常意味着在相关联的计数器tick中断被禁止期间修改报警器。
调度表被用来处理上述的同步问题,通过提供一个封装好的静态定义的溢出点集。
每个溢出点定义了:
·当处理一个溢出点时必须发生的一个或多个活动。
一个活动可以是一个任务的激活或设置一个事件。
·从调度表开始的tick偏移。
每个调度表都有一个以tick为单位的持续时间。
这个持续时间从0开始测量,它定义了调度表的模数。
在运行时,操作系统模块会在调度表上迭代,循环的处理每个溢出点。
循环迭代由一个AUTOSAR计数器驱动。
1.1.1 调度表结构
一个调度表至少有一个溢出点。
一个溢出点应该包含一个要被激活的任务的集合(可能是空的)。
一个溢出点应该包含一个要被设置的事件的集合(可能是空的)。