新双电机智能小车组装教程
- 格式:docx
- 大小:4.33 MB
- 文档页数:8


POWSOS-51小车安装指导说明书V1.0版本说明:2014-8-13V1.0POWSOS-51智能小车的电源模块、驱动模块均已焊接到小车底盘上(底板正面焊接芯片),红外小板也焊接完毕,超声波模块固定需自行焊接。
材料清单:小车底板1片POWSOS-51主板1片驱动电机固定支架4片超声波小板1片超声波模块1片红外小板1片电池盒1个驱动电机(带变速箱)2只舵机(带舵机臂,螺丝)1包万向轮1只M2x25螺丝(带螺母)2颗M3x25螺丝(带螺母)4颗M3x5螺丝16颗M3x11铜柱8颗M3x30铜柱2颗轮胎2只杜邦线(母对母)26pin驱动电机导线2对(共4根)由电池引线截取4cm长便可14500锂电池1对104瓷片电容2颗安装步骤:1.取M3x11铜柱4颗,M3x5螺丝4颗。
安装ARDUINO UNO主板固定铜柱,POWSOS-51主板先不安装。
如图:2.焊接驱动电机引线,引线可以从电池盒线(较长有多余)截取,约4CM长,红黑各两段。
引脚面向自己,左正右负,引线另一端暂不焊接到底板,以免安装电机时有妨碍。
焊接方式如图:为减少驱动电机电磁干扰(主要影响舵机,舵机不使用的时候必须拔掉插头,免得损坏),在电机两极就近焊接104瓷片电容(电容脚不要搭到电机壳和万向轮等金属):(之后照片未拍摄电容,望谅解)取4片电机固定支架,M3x25螺丝(带螺母)4颗,把驱动电机固定到底板。
首先,插入一片固定支架到内侧插槽,另取一片安装到驱动电机上:然后扣到底板上,注意左右电机安装方向,紧固螺丝:(另一侧重复步骤)然后按照正负极性,焊接电机引线:安装轮胎(注意驱动轴缺口方向):3.取M3x11铜柱4颗,M3x5螺丝8颗。
安装万向轮固定铜柱,并安装万向轮(注意长宽方向):4.取M3x5螺丝4颗(安装3颗就可以了),安装S51主板:用杜邦线(母对母)按丝印名连接底板上P10,P11到POWSOS-51主板(VCC连接到POWSOS-51的Vin,底板和POWSOS-51主板需要共地),连接好后整理下线:5.安装舵机,取M2x25螺丝(带螺母)2颗,从底部往上装螺丝固定舵机:舵机控制线可绕舵机2圈然后按颜色标识插到底板舵机接口:6.安装超声波小板舵机小臂。
填写新能源汽车动力总成装配流程。
新能源汽车动力总成装配流程新能源汽车动力总成是指喷氢燃料电池汽车、纯电动汽车、插电式混合动力汽车等新型汽车所采用的动力源,它由电机、电控器、电池以及传动系统等组成。
下面就为大家介绍新能源汽车动力总成的装配流程。
一、电机、电控器和电缆的装配1.安装电机支架。
将电机支架与电机底座相连接,固定后安装到车辆底盘上。
2.固定电机。
将电机安装在电机支架上,并将电机与车辆底盘相连。
3.安装电控器。
将电控器安装在车辆底盘上,并将电控器与电机、电池以及车辆主控制器相连。
4.连接电缆。
将电机、电控器以及电池之间的电缆连接起来,确保连接牢固,不出现松动。
二、电池系统的装配1.固定电池。
将电池固定在车辆底盘上,并连接好电池的电缆和电气连接器。
2.安装电池保护箱。
将电池装入电池保护箱中,并将保护箱与车辆底盘相连接。
3.连接高压电缆。
将电池输出端与电控器的输入端相连接,通过高压电缆实现电池和电机之间的连接。
三、传动系统的装配1.安装变速箱和驱动轴。
将变速箱和驱动轴安装在车辆底盘上,并与电机相连。
2.连接传动轴。
将传动轴与驱动轴相连,通过传动轴传递动力。
4.安装转向系统。
根据车型的不同,安装相应的转向系统。
以上就是新能源汽车动力总成的装配流程。
在实际操作中,一定要注意每个环节的安全和稳定,并严格按照相关的技术标准进行操作,保证装配的质量和可靠性。
小学综合实践活动教案电动小车的组装小学综合实践活动教案:电动小车的组装在小学的综合实践活动中,电动小车的组装是一项非常有趣且教育意义深远的任务。
通过参与电动小车的组装,学生不仅能够培养动手能力和团队合作精神,还能够学习电路原理和机械结构的基础知识。
本文将为您详细介绍电动小车组装的步骤和相关注意事项。
步骤一:准备工作在组装电动小车之前,我们需要准备所需的材料和工具。
材料包括电动小车的底盘、电动机、电池、轮胎以及一些杂物,而工具则有螺丝刀、钳子、铅笔和标尺等。
在开始组装之前,老师应该向学生简要介绍所用材料和工具的功能,并提醒他们注意安全使用工具。
步骤二:底盘安装首先,我们将底盘平放在工作台上,然后利用螺丝刀和螺丝将电动机固定在底盘上。
在此过程中,学生们应该将螺丝拧紧,确保电动机牢固地安装在底盘上。
接下来,我们需要将轮胎装在电动小车的驱动轮上,确保轮胎和电动机的轴线对齐。
通过这个步骤,学生们可以了解到机械结构的基本组成和装配原理。
步骤三:电路连接在完成底盘的安装之后,我们需要将电路连接起来。
首先,学生们应该正确地将电动机与电池连接起来,确保电动机能够正常工作。
接下来,他们还可以尝试加入一些附加的电子元件,如开关、LED灯等,以丰富电动小车的功能。
在这个步骤中,学生们将了解到电路的基本原理和连接方法,培养他们的创造力和动手能力。
步骤四:测试和修改一旦电路连接完成,学生们应该对电动小车进行测试。
他们可以通过按下开关来检查电动机是否能够启动,并观察轮子是否能正常转动。
如果发现问题,学生们应该重新检查电路连接,找出并修复故障原因。
这一步骤有助于培养学生的问题解决能力和动手实践经验。
注意事项:1. 安全第一。
在组装电动小车的过程中,学生们应该注意安全,以避免任何可能的伤害。
老师应该向他们传授有关安全使用工具和材料的知识,并在必要时提供适当的保护措施。
2. 鼓励合作。
电动小车的组装需要学生们之间的合作和配合。
老师应该鼓励学生之间相互帮助,并组织他们在小组内分工合作,以完成任务。
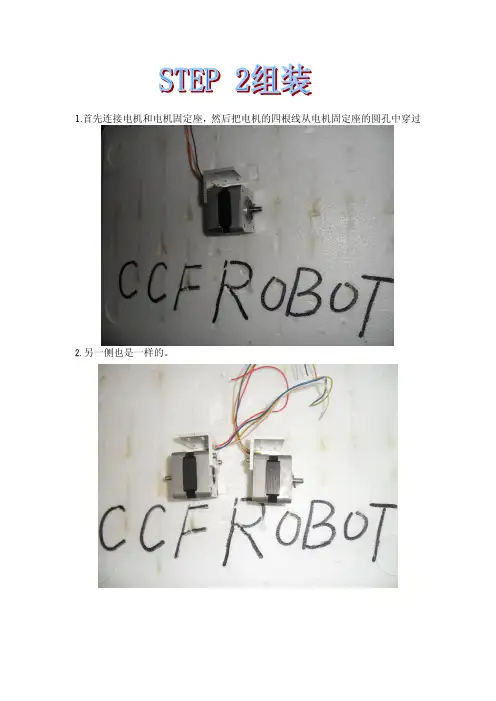
1.首先连接电机和电机固定座,然后把电机的四根线从电机固定座的圆孔中穿过
2.另一侧也是一样的。
3.把组装好的驱动单元安装到底板上,为了方便安装底板上的安装孔为长孔,电机固定座有一定的活动余量,安装时一定要注意调节两个电机在同一直线上,这样才能保证小车运动的精准性。
4.另一侧也是一样的安装方法
5.换个角度再来一张
6.接下来安装电机驱动,电机与驱动的接线顺序在接线图里面有介绍
7.然后安装联轴器。
联轴器的顶丝不要忘记装~
8.装上轮胎
9.这是反面的效果
10.接下来安装牛眼,铜柱是由一根30mm和两根8mm的拼接而成的
11.如果安装好铜柱之后,两条铜柱不是平行的话,就用手把他们弄成平行的,这样才能,准确的安装到底板上。
12.安装到底板的这个位置
13.电机驱动下方的螺母就是固定牛眼的螺母。
14.接下来安装小车的眼睛—光电开关
15.寻迹传感器安装到这里,调整下传感器的角度到适合所寻黑线的宽度。
16.然后插上线,注意区分vcc gnd out 三根线不要弄混。
17.按照接线图,插线
18.按照个人习惯整理线路
19后接上为电机疯癫的电源线。
这根线是随电池赠送的不在本套餐内。
19.传感器的线最好在底板下面穿过来,这样显得不会很乱。
20.换个角度再来一张,控制板下面的空间比较大可以放电池等东西。
21.感觉乱的话可以用螺旋管将多根线绕在一起(本店有散装出售,1元/20cm ) 购买请拍此链接:
/item.htm?id=14432170848。
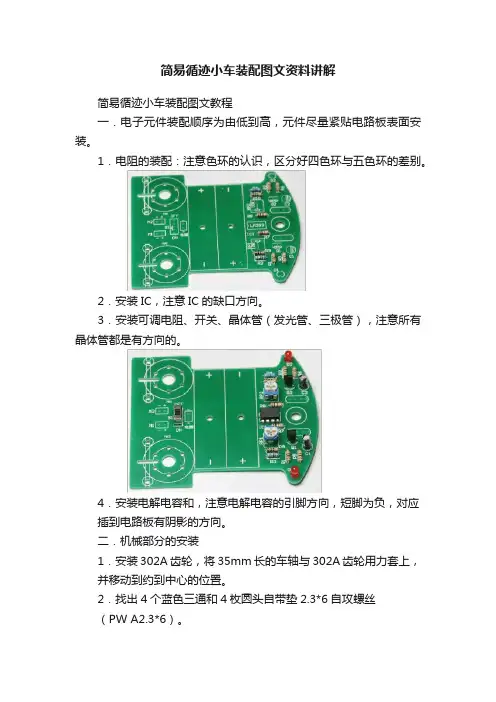
简易循迹小车装配图文资料讲解简易循迹小车装配图文教程一.电子元件装配顺序为由低到高,元件尽量紧贴电路板表面安装。
1.电阻的装配:注意色环的认识,区分好四色环与五色环的差别。
2.安装IC,注意IC的缺口方向。
3.安装可调电阻、开关、晶体管(发光管、三极管),注意所有晶体管都是有方向的。
4.安装电解电容和,注意电解电容的引脚方向,短脚为负,对应插到电路板有阴影的方向。
二.机械部分的安装1.安装302A齿轮,将35mm长的车轴与302A齿轮用力套上,并移动到约到中心的位置。
2.找出4个蓝色三通和4枚圆头自带垫2.3*6自攻螺丝(PW A2.3*6)。
3.先将内侧的两个三通用螺丝固定到电路板上。
4.将车轴和齿轮套入三通中,并移动齿轮位置,使齿轮在电路板的卡槽中,车轴刚好超出三通多一点,不超过1mm。
5.将另外两个三通套入车轴中并用螺丝固定到电路板上。
6.将蜗杆用力套入电机轴中,并压到接近电机轴承的位置,找出6-12枚2*3mm的圆头机丝螺丝用于固定电机。
7.将电机用螺丝固定到电路板上,一般每个电机固定3枚螺丝就OK了。
8.将车轮用力套入车轴上,并移动到接近电路板的位置。
(注意用力技巧,可以将车轴的另一端先靠到桌面等固定物上,适当用力敲打车轮到合适位置。
)9.将5*20的螺丝加配套螺母固定到电路板上,然后套上不锈钢盖形螺母作为万向轮使用。
三.安装剩余电路部分。
1.安装循迹红外发射与接收管,注意有正负方向的区别,使其高度略低于万向轮约3-5mm。
2.安装电池盒,电池盒通过不干胶粘到电路板上,注意位置必须准确,确保一次性成功,不可进行二次粘接。
连接电机导线,可以将过长的导线剪到合适的长度,新剥开的线头先要捻头并烫锡处理,线头长度不超过2mm。
电池盒用不干胶固定到电路板上,需特别注意电源的正负极不要接反,电机反转可以交换两条线的位置。
套件默认提供的是2节5号电池盒,可用2节碱性电池供电的(套件中不提供,需自备)。

小车走起来前面我们搭建了简单的手推车,这个小车是靠人力才可以运动的。
那么,小车需要怎么才可以自己运行呢?对,我们需要动力装置。
你知道我们身边的各式各样的车子都是依靠什么作为动力的吗?自行车,靠人力驱动货车,靠柴油发动机驱动摩托车,靠汽油发动机驱动玩具汽车,靠微型电动机(也叫马达)驱动想一想,还有什么动力可以驱动小车?我们今天做的这个小车就用电机作为动力装置。
这个套装里的电机。
套装里一共有2个电机,2个均为低速电机。
低速电机的转速很低,输出力量大,作为小车的动力装置很是方便。
今天我们就采用一个低速电机组装一个会走的小车。
跟我一起做:我们用一个低速电机搭建一个小车,搭建的具体步骤如图所示:准备在电机的两侧装上轮胎完成后的效果:这个小车中我们使用了这个部件-----控制器。
如图所示:控制器的下部有2个按键和一个指示灯,按键和功能如下图所示。
同时指示灯根据控制器目前的状态显示不同的颜色。
控制器的电源开关在控制器的底部,充电插口在控制器的侧面:控制器是我们组建的所有机器人的控制核心,它有两排接口,用于插接电机以及传感器。
简单的介绍了一下机器人的控制器,我们再仔细分析一下这个小车的结构,这个小车只用了一个电机,很显然,这个小车只能够做前进或者后退的动作,无法转弯。
我们就从这个简单的小车开始,看看如何让这个小车走起来。
大家知道,我们买来的玩具车,只要装上电池,按下开关,或者按动遥控器就可以让小车走起来。
而这款小车将开关按下之后我们发现小车并不会运行。
这是怎么回事呢?实际上,这就是平常的玩具车和机器人小车的区别。
机器人小车要想运行必须给控制器输入程序才可以。
程序是什么呢?简单的说,程序就是控制机器人运行的命令。
现在我们暂且不需要理解程序,只知道需要输入程序即可。
接下来我们给这个小车输入一个简单的程序。
首先将编程软件装入你的电脑。
打开配套光盘,找到汇博士积木机器人教程,双击打开:会看到里面有一个图形化编程软件文件夹,打开这个文件夹,即可看到图形化软件安装程序:(安装之前要关闭其他运行的程序,退出杀毒软件)双击安装程序图标,按照默认安装路径和提示,既可以完成软件的安装。

MINI-Z的拆解与组装可以说是新同学的一大噩梦今天碰巧笔者的友人请我帮他组一台AWD所以就把整个组装过程完整记录起来与大家分享!将来有机会会继续推出其他车种的组装教学!希望对新同学有帮助!现在就请看图吧!一个空空的底盘!跟着我的步骤做,保证非常顺畅组完第一步先裝中軸!把後方的墊片鎖上,使用中等長度圓頭螺絲接下來組裝轉向齒輪組,這種金屬棒總共有四根,長度有最短的一根、次短的兩根及最長的一根,而這兩根金屬棒是裡面最短及次短的!最短的那根金屬棒裝在上方的洞,次短的裝在下面的洞接下來組裝三個轉向齒輪,齒輪由左至右為大齒輪、中齒輪及小齒輪,三個齒輪直徑差不多,不同的是齒的大小大齒先裝在沒有金屬棒的洞裡面中齒裝在下方的金屬棒上小齒裝在上方金屬棒上接下來再拿第二根次短的金屬棒插在圖中的位置拿起剛剛組裝的齒輪對準!不過先不要壓緊!把伺服機保護器裝在大齒輪的白色圓柱上小心的把兩邊壓緊接下來組裝可變電阻,簡稱VR,大齒輪上有個一字型的縫,VR上有個突出的一字型金屬把VR跟大齒兩邊對準之後插入,調整VR成圖中的方向拿起這塊VR固定器,VR固定器上有兩個突起圓柱,是要固定住VR的依照圖中方向對準後插入接下來拿起伺服機馬達依照圖中方向插入完成以上步驟之後,準備裝入底盤小心拿起,依照圖中方式裝入底盤接下來拿起四根金屬棒中最長的那根,插入伺服機保護器,放置圖中的位置在一張細部特寫將墊片鎖上,使用中等長度圓頭螺絲接下來安裝開關將開關調整至圖中方向後放入拿起開關固定器依照圖中方向放入圖說↓:此時轉向電池倉,使用中等長度平頭螺絲圖說↓:再拿起伺服器蓋跟AD PORT保護蓋圖說↓:依照圖中方向壓入AD PORT保護蓋圖說↓:裝上伺服器保護蓋圖說↓:依照圖中方向小心裝入,把電線整理好,全部的電線都需經由那個方型小縫穿過圖說↓:伺服機保護蓋壓緊之後鎖上螺絲,使用中等長度圓頭螺絲圖說↓:此時開始安裝電源線,灰色為正極,黑色為負極,依照圖中位置擺放,銲接突起點須朝下圖說↓:把機板的紅色正極線跟灰色的正極線鎖一起,機板黑色的負極線亦然,機板線的焊接點必須朝上,使用小型平頭螺絲圖說↓:接下來拿起馬達線鎖點圖說↓:裝上圖中相對位置圖說↓:將機板小心裝上圖說↓:可以在馬達線鎖點先預鎖一顆螺絲,方便機板蓋安裝圖說↓:將白色的天線依照圖片中的跑法放置圖說↓:拿出機板蓋圖說↓:先將前面裝下去,再把後面固定片往後勾圖說↓:將固定片用另一隻手壓下去圖說↓:天線由機板蓋邊的小縫鑽過,不要大力把它壓斷了圖說↓:將機板蓋前方兩個螺絲鎖上,使用中等長度圓頭螺絲圖說↓:接下來拿出傳動大齒輪,這個是90mm的傳動大齒輪圖說↓:仔細看可以看出傳動軸是有削角的圖說↓:當然!傳動大齒輪有相對應的洞圖說↓:在安裝的時候,可以使用左手或右手食指壓住傳動軸的另一端圖說↓:再用大拇指壓入傳動大齒輪圖說↓:傳動大齒輪安裝完成!圖說↓:接下來拿出轉向尺及轉向尺固定器,這裡使用改裝的轉向尺圖說↓:把轉向尺裝入轉向尺固定器圖說↓:把車翻過來,可以看見剛剛安裝的伺服機保護器銀色金屬棒圖說↓:把轉向尺U型的部分對準銀色金屬棒安裝圖說↓:轉向尺安裝完成圖說↓:把車翻回來,拿出前差速器圖說↓:裝入前差速器圖說↓:再拿出前轉向座及萬向傳動軸,在此使用改裝轉向座及改裝萬向傳動軸,萬向傳動軸簡稱狗骨圖說↓:將狗骨插入轉向座圖說↓:將轉向座依照圖中方式安裝到車上圖說↓:拿起前彈簧圖說↓:裝上前彈簧圖說↓:拿起前差速器保護蓋,右邊是原廠的,在此使用左邊改裝的差速器保護蓋圖說↓:不管是原廠的或是改裝的,如圖顯示,後方一定使用最長的圓頭螺絲,前方使用中等長度的圓頭螺絲圖說↓:前差速器保護蓋安裝完成,這塊改裝的真的不錯看!內六角螺絲是套件送的,是鍍鈦的喔!圖說↓:接下來拿起後差速器座及"裝飾用"後保險桿圖說↓:鎖上去,使用中等長度圓頭螺絲圖說↓:翻過來之後拿起TOE IN尺圖說↓:鎖上去,使用中等長度平頭螺絲圖說↓:翻過來拿出後差速器圖說↓:裝上後差速器圖說↓:拿出後輪座,並裝上狗骨圖說↓:裝上後輪座圖說↓:裝上後彈簧圖說↓:裝上後差速器上蓋並鎖上螺絲,使用中等長度圓頭螺絲圖說↓:準備裝上!圖說↓:在此要先解釋一下這兩個洞的差別圖說↓:如果是使用94mm的車身,須搭配94mm的傳動大齒輪,並鎖在這個鎖點上。

Aduino智能小车安装说明产品概述:该套件可以智能判断引导线并检测躲避障碍物,可实现自动导引和避障功能,AS-4WD寻线避障移动机器人使用Mini红外寻线传感器感知引导线,使用Mini红外避障传感器感知障碍物。
充电开关步骤1:准备工作∙将导线剪成要求长度,在其端部将导线的外皮剥除,镀锡。
∙将准备好的热缩管均匀的用斜口钳剪成6段∙将充电接口和拨动开关焊接好接线,注意图中拨动开关的连接,一定要按照图示进行操作!(拨动开关具有单向导通特性)。
步骤2:连接充电接口和拨动开关将两个部件连接到一起之前要把热缩管套到红色短导线上用扎带将导线整理好,是其显得规整一些,然后用斜口钳把扎带多余的部分去掉,这样一个既能充电又能作为开关使用的充电开关就做好了电源连接线图示平台安装步骤步骤1:平台侧板电机安装两侧电机安装相同,注意安装前将电机接线用电烙铁焊接好,套上热缩管加热塑封。
使用零件:平台侧板*2个、直流减速电机*4个、M3*25螺丝*8个、M3六角螺母*8个步骤2:平台底板安装使用零件:步骤1中安装好电机的侧板*2套、平台底板*1个、M3*6螺丝*4个步骤3:双H桥电机驱动板安装驱动板安装方向随意,注意同侧电机接线方向顺序,保证同侧电机转向是相同的。
使用零件:步骤2中的组合体、双H桥直流电机驱动板*1个、M3*10尼龙柱*4个、M3六角螺母*4个、M3*6螺丝*4个步骤4:电池盒安装电池盒可用双面胶固定,后轮电机接线需插入杜邦线帽,接入步进电机接口使用零件:电池盒*1个或锂电池*1块步骤5:4WD端板安装使用零件:4WD端板*1个、步骤4中的组合体*1个、M3*6螺丝*4个、M3六角螺母*4个步骤6:充电接口、拨动开关安装使用零件:步骤1中制作好的充电开关接口连接线、4WD上板步骤7:Carduino UNO控制器安装使用零件:步骤6中的组合体、Carduino UNO控制器*1个、M3*10尼龙柱*3个、M3*6螺丝*3个、M3六角螺母*3个步骤8:避障传感器安装使用零件:M3*20尼龙柱*3个、M3*6螺丝*3个、M3六角螺母*3个、避障传感器*3个步骤9:寻线传感器安装使用零件:寻线传感器*5个、M3*8螺丝*5个、M3六角螺母*5个、步骤5中的组合体*1套步骤10:4WD上板安装使用零件:4WD平台上板*1个、步骤9中的组合体*1套步骤11:4WD轮子安装使用零件:步骤9中的组合体*1套、4WD轮子*4个步骤12:V5.0传感器扩展板插入使用零件:V5.0传感器扩展板*1个、步骤11中安装好的平台*1套接线说明接线说明:∙数字口5→接双H 桥驱动板的EB∙数字口6→接双H 桥驱动板的I4∙数字口7→接双H 桥驱动板的I3∙数字口8→接双H 桥驱动板的I1∙数字口9→接双H 桥驱动板的I2∙数字口10→接双H 桥驱动板的EA∙寻线传感器从左至右依次接Arduino 控制器的数字口2、数字口3、数字口4、数字口11、数字口12。
直插发光二极管,直插电解电容都有正负极之分,长脚为正,短脚为负。
贴片发光二极管从正面看注意有标记的一边为负极,标记可能是一个小点,或一条细线。
红外线发光二极管点亮后肉眼看不出来,可以借助手机摄像头观察,就可以判断这个发光二极管好坏。
找出集成电路的引脚1:贴片集成电路的正面有一个小凹点,这个凹点对应的引脚就是引脚1,双列直插集成电路的正面边沿有一个小缺口,把这个集成电路的缺口朝上放,缺口左边第一个引脚就是引脚1.电机没有正负极之分,但是需要注意两个电机的接法要相同。
四路红外线感应二极管的灵敏度调节红外感应灵敏度控制原理:图1如图1,红外线接收二极管D2反接在电路中,其反向电流会随着受到的红外光线照射量的大小而变化,红外光线增强,反向电流增大。
R2上的电压增大。
这个电压输出到电压比较器的一个输入端3。
电压比较器的另外一个输入端2的电压通过可调电阻Rp1调节。
当电压比较器的3脚电压高于2脚电压时,比较器输出1(5V),发光二极管D3两端电压相同,不会发出光亮。
当3脚电压小于2脚电压时,比较器输出0V,D3正偏导通,发出光亮。
调节RP1,使比较器的2脚电压变得很低。
当D2受到及小的红外光照射时,比较器3脚的电压也会比2脚高,使得比较器输出5V电压,D3截止。
调节Rp1使比较器的2脚电压升高,这样就需要更大的红外线照射量才会使比较器输出5V。
这样就实现了红外感应灵敏度调节。
调节灵敏度:。
用于循黑线时,将红外线收发二极管对准黑线。
调节RP1,使得D3刚好处于点亮状态,(比较器2脚电压只比3脚高一点点,比较器输出0),这样,红外线感应灵敏度就调好了。
用于避障时,将红外接收二极管对准空旷的地方(前方没有障碍物) ,调节RP1,使得D3刚好处于点亮的状态,(比较器2脚电压只比3脚高一点点,比较器输出0),这样,红外线感应灵敏度就调好了。
在智能车上,采用集成电路LM339,他是一个四路电压比较器,在内部有四个独立的电压比较器,只要知道如何调整其中一个的灵敏度。
小汽车整车组装流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!小汽车整车组装流程。
1. 白车身组装。
焊装: 将冲压成型的车身零部件焊接在一起,形成白车身框架。
智能小车装配教程准备工作:备好螺丝刀、十字套筒、配套螺丝、相关支架。
组装过程:我们先从前支架开始。
组装前对照我们的发货清单检查下物品是否齐全。
检查好了我们就开始组装。
1.拿出黑色转向杯、轴承、M4X20平头螺丝,如下图:把两个轴承放进转向杯里,大小轴承里外各放一个,使轴承完全卡进转向杯里。
2.然后将轮子跟这个转向杯用M4X20螺丝、M4自锁螺母装在一起。
如下图:自锁螺母这头用十字套筒套住,另外一边用螺丝刀转动M4x20螺丝,不要锁太紧要保证轮子能够自如转动。
用这种方法装好两个轮子放在一旁。
3.舵机转向结构安装,拿出舵机支架、舵机用螺丝固定在一起:将一字臂支架卡在舵机的输出轴上并锁上M3X6螺丝,注意一字臂的方向:4.将上面这部分与大底板用M3X22铜柱、M3X8螺丝组装在一起。
如下图:5.拿出长支架装在前面装好的模型上。
如下图:(组装过程中同样也是用套筒套住螺母,螺丝头用螺丝刀拧。
注意自锁螺母不要锁到底,保证长条支架能够自如转动)6.将前面装好的轮子安放在上面模型中,用M2X35螺丝跟M2自锁螺母固定如下图:这里需要用所给的内六角扳手拧M2X35螺丝,最底下同样用十字套筒套住自锁螺母,拧到合适的位置。
另外一边轮子用同样的方式安装好。
7.将转向杯的转向臂跟长条支架固定在一起。
如下图:同样用套筒套住自锁螺母,螺丝头用螺丝刀拧。
拧到合适位置保证接触面转动灵活。
前支架装好后如下图:下面我们来看看后支架的安装过程:1.拿出全部后支架:将其中一个盖板用M3X8螺丝将M3X25铜柱、M3X30铜柱锁住。
2.拿出540电机和两个侧板如下图组装在一起:注意将侧板跟电机相应的安装孔对准:3.将另一块盖板卡上去并锁上螺丝:上面装好之后在侧板上轴承孔上放上5X11X4杯士轴承如下图:4.同时将车轴套进去,注意两边伸出来的长度保持相等。
5.依次将大齿轮跟轴套套进车轴里,保证大齿轮跟电机的输出齿轮啮合好,位置对准后用内六角扳手锁紧齿轮上的顶丝。
电机支架 M3*8螺丝 M3螺母 金属底板
电机 M3*6螺丝
双电机智能小车装配教程
准备工作:备好螺丝刀、十字套筒、配套螺丝、相关支架。
组装过程:组装前对照我们的发货清单检查下物品是否齐全。
检查好了我们就开始组装。
1. 拿出金属底板、电机支架、M3X8螺丝、M3螺母如下图组合在一起:
2. 拿出电机,将电机装到上面支架上。
用M3*6螺丝固定好如下图:
正面
反面 正面
侧面
正面
M3*6螺丝 M3*8螺丝
3. 拿出6mm 联轴器跟车轮分别装到电机输出轴上,如下图所示:
4. 拿出多功能支架固定在金属底板上,如下图所示:
反面
联轴器
车轮
侧面放大视图
M4*6
M3螺母
多功能支架
支撑板 (锁
M3*8螺丝)
注意:舵机的输出轴在这侧
M3*22铜柱 (反面锁M3*8螺丝)
M3螺母
M3*10螺丝
5. 拿出舵机装在上面多功能支架上(舵机默认在中间位置,不要人为转动输出轴),如下图:
6. 拿出M3*22铜柱、支撑板分别固定在底板上如下图:
7.拿出相关支架,按下图组装在一起:
把两个轴承放进转向杯里,大小轴承里外各放一个,使轴承完全卡进转向杯里。
8.然后将轮子跟这个转向杯用M4X20螺丝、M4自锁螺母装在一起。
如下图:
自锁螺母这头用十字套筒套住,另外一边用螺丝刀转动M4x20螺丝,不要锁太紧要保证轮子能够自如转动。
用这种方法装好两个轮子放在一旁。
M2*35螺丝
舵盘支架 注意:这里用套筒跟小扳手紧固的时候不要将M2自锁螺母完全锁死,要保证其与底板之间有一点空隙。
舵盘
舵盘 M2小扳手 9. 将两个前轮安装到上面支架上,如下图所示:
10. 拿出一个金属舵盘跟舵盘支架,将舵盘跟舵盘支架依次装在舵机上如下图:
M3*6螺丝 套筒 注意:这里舵盘安装时两孔之间连线要保证在水平跟垂直位置。
M2自锁螺母
M2*15 M2自锁螺母 长拉杆总成 长拉杆总成 M2*25螺丝 短拉杆总成
M3螺母(2个) M3自锁螺母 11. 将长短拉杆总成按下图所示分别装在小车上。
注意:以上组装过程中,需要锁自锁螺母的地方都不能将自锁螺母锁死,要保留一点空隙,以保证能自如转动。
M3*20螺丝 M2自锁螺母
M3*10铜柱 M3*10铜柱 M3*30铜柱 铜柱跟底板之间都用M3*8螺丝固定 M3*8螺丝
12. 下面我们来看看后面的控制板部分如何安装:
将包装盒里的亚克力板子拿出来
a 、普通车模套餐:直接将黑色亚克力安装到铝合金车底板上。
如下图:
b 、带WIFI 摄像头套餐:先将摄像头装在亚克力板子上,再固定到铝合金板上。
c 、带CCD 循迹模块套餐:先将循迹摄像头模块装在亚克力板上,再固定到铝合金板上;
将这块亚克力板表面的保护纸撕下来 摄像头组件
控制板 M3*30铜柱 M3*10铜柱 铜柱跟底板之间都用M3*8螺丝固定。