外文翻译---大倾角液压支架四连杆机构的设计
- 格式:docx
- 大小:3.03 MB
- 文档页数:13
四连杆机构的建模及优化设计关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BARLINKAGEDESIGNOFTHEMODELINGANDOPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof。
Second, the level of support to withstand greater force. This article is to discuss four hydraulic linkage mechanisms.In the article, we study the four-bar linkage hydraulic problems, and can be considered from several aspects of the solution. This paper studies the four hydraulic linkage, hydraulic four-bar linkage is mine machinery - the key hydraulic components. Article on the four-bar linkage and hydraulic support the overall studied.Paper also the dynamic characteristics of four-bar linkage analysis, in the process of the Application of the SolidWorks COSMOSMotion in modeling and motion simulation.KEYWARDS:Four-link,SolidWorks,COSMOSMotion, motion simulation.目录摘要IABSTRACTII1.1引言11.2 SolidWorks软件简介11.2.1 SolidWorks功能描述11.2.2 CAD技术概述31.2.3 CAD系统41.2.4 CAD技术的应用41.2.5 COSMOSmotion简介62四连杆机构建模72.1四连杆机构的作用72.2四连杆机构的几何作图法82.3 四连杆机构优选方法122.3.1 目标函索的确定122.3.2 四连杆机构的几何特征122.4运用SolidWorks建立四连杆机构模型122.5 本章小结153 对四连杆机构进行COSMOSMotion运动分析163.1COSMOSMotion软件的应用163.2四连杆机构的运动仿真过程173.2.1选择马达和设置马达参数183.2.2仿真机构的运动设置193.2.3 仿真机构的参数设置193.3 仿真数据处理20结论33参考文献34致谢351绪论1.1引言液压传动时一项新兴技术,他被引用到工业领域只有很短的时间,液压支架已广泛应用于我国煤矿井下支护,它具有初撑力大、恒阻、安全和高效等特性,是适合我国国情的一种有效的工作面支护设备。
摘要本文讨论了对四杆机构的优化分析问题,优化问题的关键通常集中在非线性规划问题上。
本方法的目标是:在铰接力保持在规定范围之内的条件下,决定机构连接长度的最优值,缩小机构耦合连接处的任意点C的运动轨迹T与既定的轨迹P之间的偏差。
全局优化的方法使用目的在于找到全局最优解。
该过程使用了自适应网格加密算法。
该算法是基于对每一次迭代的可行节点的识别,每一次迭代定义了一个解集。
把远离当前最佳解决方案的节点从解集中删除。
该算法确定的是满足预定条件的最优解的区域,而不单纯是一个最佳点。
关键词液压支架,四杆机构,全局优化,铰链力,自适应网格细化1 介绍在一些设备中,四连杆机构是一种被广泛应用于各种设备中的驱动机构,它可以提供设备所需的复杂运动并提供可靠地支撑力、加速度以及拉力。
例如控制车辆转弯的装置或用来保证矿井工作环境安全的液压支架。
由于四杆机构是一种简单的机构,三维运动分析成为一项要求严格的工作。
我们必须确定需要完成指定的运动和受力转换的各链路长度之间的比例。
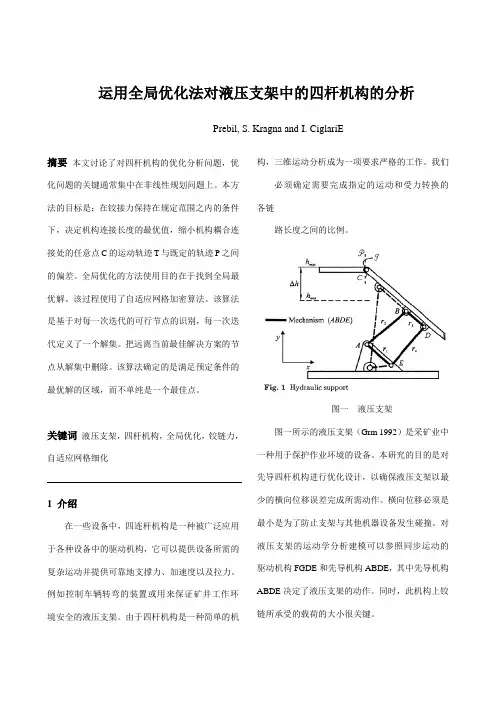
图一液压支架图一所示的液压支架(Grm 1992)是采矿业中一种用于保护作业环境的设备。
本研究的目的是对先导四杆机构进行优化设计,以确保液压支架以最少的横向位移误差完成所需动作。
横向位移必须是最小是为了防止支架与其他机器设备发生碰撞。
对液压支架的运动学分析建模可以参照同步运动的驱动机构FGDE和先导机构ABDE,其中先导机构ABDE决定了液压支架的动作。
同时,此机构上铰链所承受的载荷的大小很关键。
运用全局优化法对液压支架中的四杆机构的分析Prebil, S. Kragna and I. CiglariE到目前为止,对运动学的优化分析通常是与设计敏感性分析结合在一起的(Bla 1998 2000)。
由于转化性较差和数值的无效性,传统的梯度法应用起来很不方便。
更重要的是,我们可以推断机构铰接处的铰接力的影响比先导机构的公差影响更大。
为了克服上述方法的种种缺点,我们引入全局优化法。
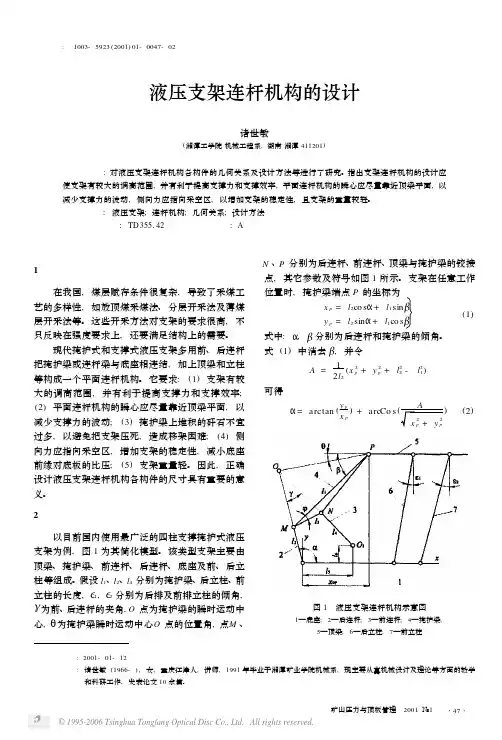
基于液压支架四连杆机构参数特点分析与研究摘要:本文主要针对液压支架四连杆机构的功能及影响四连杆性能的设计因素进行探索。
其中重点介绍了液压支架四连杆机构的构成及特点,并从影响四连杆参数设计的九个方面进行了详细论述。
关键词:液压支架;四连杆机构;梁端距;掩护梁背角;双扭线中图分类号:TD355 文献标识码:A1 液压支架四连杆机构的构成与功能1.1 液压支架四连杆机构的构成液压支架四连杆机构的构成从表面上看只有前连杆和后连杆,实际上掩护梁和底座是组成四连杆机构的另外一个连杆,掩护梁和底座除了构成四连杆机构以外,还承担着掩护功能、推移功能、抬底功能等其它的功能。
前后连杆也具有挡矸、管环、阀架等功能。
因此,四连杆设计首先是运动机构设计,还包括各部件的其它功能设计。
液压支架四连杆机构有正负之分,正四连杆机构被广泛采用,反四连杆多用于放顶煤过渡支架。
在反四连杆机构中由于处于掩护梁位置的部件已不再承担掩护功能,通常被改称为斜梁。
1.2 液压支架四连杆机构的功能液压支架四连杆机构有三个功能:一是纵向与横向的稳定功能,即承接外部施加到支架上的横向、纵向的水平力,使支架顶梁不会出现大幅度的水平扭转和横向纵向翻转,使支架立柱免受水平力。
要实现这一功能,设计中应确保组成四连杆机构的各个零部件具有足够的强度,要进行机构受力分析和零部件强度校核计算。
二是将顶梁所受到来自顶板的外载通过四连杆机构传递到底座上。
这一功能我认为是四连杆机构负面效应。
三是让支架顶梁在升降过程中,顶掩铰接点的运动轨迹近似为一条垂线。
实质是让支架在升降过程中,顶梁或前梁的前端至采煤工作面煤壁的距离基本保持不变,使得因空顶距变化量带来的支架顶梁前端的支护效果变化量最小。
液压支架四连杆机构中顶掩铰接点的运动轨迹一般呈“双扭线”状,水平运动范围被称为“摆幅”。
MT/T556-1996《液压支架设计规范》有具体的规定:“具有四连杆机构的支架梁端水平位移量在支架使用高度范围内应不大于80mm。
本科毕业设计说明书四连杆机构的建模及优化设计FOUR-BAR LINKAGE DESIGN OF THE MODELING AND OPTIMIZATION学院(部):专业班级:学生姓名:指导教师:2010年 5 月31 日四连杆机构的建模及优化设计摘要四连杆是掩护式支架和支撑掩护式支架的最重要部件之一,其作用概括起来主要有两。
一是当支架由高到低变化时,借助四连杆机构使支架顶梁前端点的运动轨迹近似双纽线。
从而使支架顶梁前端点与煤壁间距离的变化大大减小,提高了管理顶板的性能;二是使支架承受较大的水平力。
这篇文章就是讨论液压支架四连杆机构的。
在文章里,我们研究了液压支架四连杆机构所面临的问题,及可以从几个方面考虑解决的方法。
文章研究的是液压支架四连杆机构,液压支架四连杆机构是矿上机械——液压支架的关键部件。
文章对四连杆机构和液压支架整体进行了研究。
文章还对四连杆机构的动态特性进行分析,在此过程中运用了SolidWorks中的COSMOSMotion进行建模和运动仿真。
关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BAR LINKAGE DESIGN OF THEMODELING AND OPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof; Second, the level of support to withstand greater force. This article is to discuss four hydraulic linkage mechanisms.In the article, we study the four-bar linkage hydraulic problems, and can be considered from several aspects of the solution. This paper studies the four hydraulic linkage, hydraulic four-bar linkage is mine machinery - the key hydraulic components. Article on the four-bar linkage and hydraulic support the overall studied.Paper also the dynamic characteristics of four-bar linkage analysis, in the process of the Application of the SolidWorks COSMOSMotion in modeling and motion simulation.KEYWARDS:Four-link, SolidWorks, COSMOSMotion, motion simulation.。
录一:中文文献一、联动可能被定义为固体的,或链接,其中每一个环节,是连接通过引脚连接(铰链)或滑动关节至少有两个人组合。
为了满足这一定义,必须形成一个联动层出不穷,或关闭,或一个封闭的链条链系列。
很明显,有许多链接链的行为从为数不多的不同。
这就提出了一个非常重要的问题,关于为运动中的一台机器传输给联动的适用性。
这是否适当取决于链接的数量和接头数量。
二、自由度。
一个三杆机构(含连在一起的三间酒吧)显然是一个僵化的框架,没有相对运动之间的联系是可能的。
来描述一个四连杆机构,有必要才知道之间的任何连接两个角度的联系的相对位置。
(包括固定链接OQ的,在图5c机制四个环节,因此是一个四连杆机构。
)这种联系是说,有一个自由度。
两个角度都必须在指定的五杆机构的联系的相对位置,它有两个自由度三、单自由度运动的联系,制约,也就是说,对所有的链接上所有的点都认为是固定的,确定的其他链接路径。
路径是最容易掌握的或假设上的路径是必要的联系是固定的,然后移动的方式与约束兼容其他环节的可视化。
四、四杆机构。
当一个约束联系的成员之一,是固定的,联动机制,执行变成了机器中的一个有用的机械功能的能力。
在针脚连接联系的输入(驱动器)和输出(跟随者)链接通常枢连接到固定的联系;连接链路(耦合器)通常不投入,也没有输出。
由于任何一个链接可以是固定的,如果链接的不同长度,四个机制,用不同的输入输出关系,每一个都可以得到以四杆机构。
这四个机制是说是基本的联动反转。
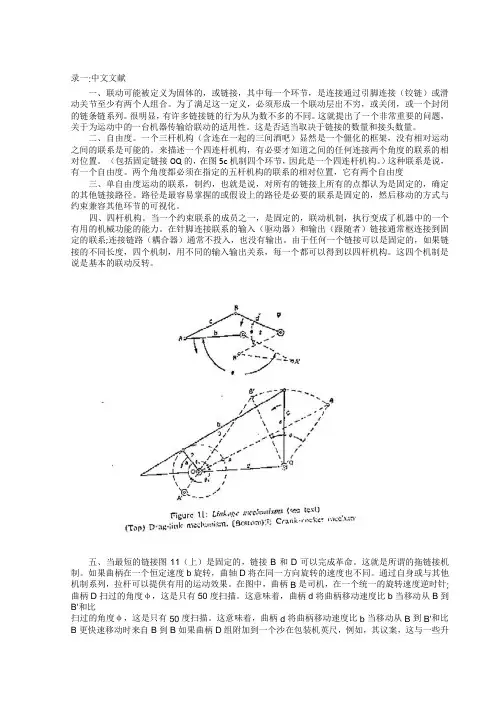
五、当最短的链接图11(上)是固定的,链接B和D可以完成革命。
这就是所谓的拖链接机制。
如果曲柄在一个恒定速度b旋转,曲轴D将在同一方向旋转的速度也不同。
通过自身或与其他机制系列,拉杆可以提供有用的运动效果。
在图中,曲柄B是司机,在一个统一的旋转速度逆时针;曲柄D扫过的角度φ,这是只有50度扫描。
这意味着,曲柄d将曲柄移动速度比b当移动从B到B'和比扫过的角度φ,这是只有50度扫描。
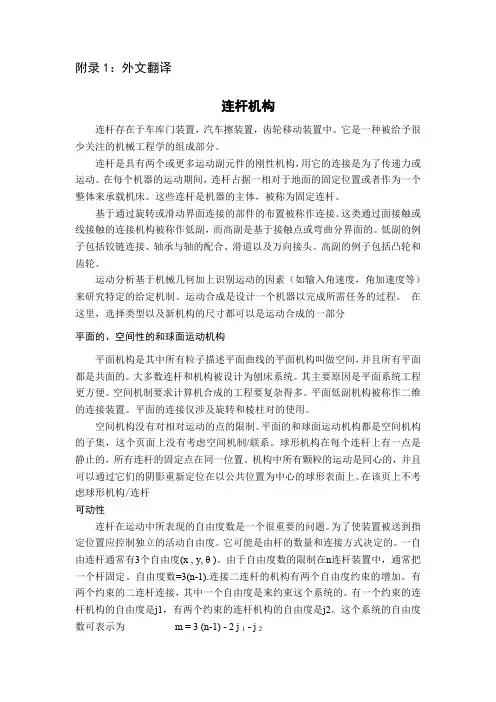
附录1:外文翻译连杆机构连杆存在于车库门装置,汽车擦装置,齿轮移动装置中。
它是一种被给予很少关注的机械工程学的组成部分。
连杆是具有两个或更多运动副元件的刚性机构,用它的连接是为了传递力或运动。
在每个机器的运动期间,连杆占据一相对于地面的固定位置或者作为一个整体来承载机床。
这些连杆是机器的主体,被称为固定连杆。
基于通过旋转或滑动界面连接的部件的布置被称作连接。
这类通过面接触或线接触的连接机构被称作低副,而高副是基于接触点或弯曲分界面的。
低副的例子包括铰链连接、轴承与轴的配合、滑道以及万向接头。
高副的例子包括凸轮和齿轮。
运动分析基于机械几何加上识别运动的因素(如输入角速度,角加速度等)来研究特定的给定机制。
运动合成是设计一个机器以完成所需任务的过程。
在这里,选择类型以及新机构的尺寸都可以是运动合成的一部分平面的、空间性的和球面运动机构平面机构是其中所有粒子描述平面曲线的平面机构叫做空间,并且所有平面都是共面的。
大多数连杆和机构被设计为刨床系统。
其主要原因是平面系统工程更方便。
空间机制要求计算机合成的工程要复杂得多。
平面低副机构被称作二维的连接装置。
平面的连接仅涉及旋转和棱柱对的使用。
空间机构没有对相对运动的点的限制。
平面的和球面运动机构都是空间机构的子集,这个页面上没有考虑空间机制/联系。
球形机构在每个连杆上有一点是静止的,所有连杆的固定点在同一位置。
机构中所有颗粒的运动是同心的,并且可以通过它们的阴影重新定位在以公共位置为中心的球形表面上。
在该页上不考虑球形机构/连杆可动性连杆在运动中所表现的自由度数是一个很重要的问题。
为了使装置被送到指定位置应控制独立的活动自由度。
它可能是由杆的数量和连接方式决定的。
一自由连杆通常有3个自由度(x , y, θ )。
由于自由度数的限制在n连杆装置中,通常把一个杆固定。
自由度数=3(n-1).连接二连杆的机构有两个自由度约束的增加。
有两个约束的二连杆连接,其中一个自由度是来约束这个系统的。
四杆机构英文作文英文:Four-bar linkage is a mechanical linkage that consists of four rigid bodies (called bars or links) connected in a loop by four joints. It is a common type of mechanism used in many applications, such as in engines, machines, and robots.The four bars can be arranged in different configurations, each with its own unique motion characteristics. For example, the crank-rocker mechanism has one fixed link (the ground) and three moving links, while the double-crank mechanism has two fixed links and two moving links.One of the most important applications of four-bar linkage is in the suspension system of vehicles. The suspension system connects the wheels to the chassis and provides a smooth ride by absorbing shocks and vibrations.Four-bar linkage suspension systems are commonly used in vehicles because they are simple, reliable, and efficient.Another application of four-bar linkage is in robotics. Robots use four-bar linkages to achieve different types of motion, such as linear motion, rotational motion, and oscillatory motion. For example, a robotic arm may use afour-bar linkage to lift and move objects.Overall, four-bar linkage is a versatile and widelyused mechanism in engineering and technology. Its simple design and reliable operation make it a popular choice for many applications.中文:四杆机构是由四个刚体(称为杆或连杆)通过四个连接点组成的机械连杆。
四连杆机构的建模及优化设计四连杆机构的建模及优化设计摘要四连杆是掩护式支架和支撑掩护式支架的最重要部件之一,其作用概括起来主要有两。
一是当支架由高到低变化时,借助四连杆机构使支架顶梁前端点的运动轨迹近似双纽线。
从而使支架顶梁前端点与煤壁间距离的变化大大减小,提高了管理顶板的性能;二是使支架承受较大的水平力。
这篇文章就是讨论液压支架四连杆机构的。
在文章里,我们研究了液压支架四连杆机构所面临的问题,及可以从几个方面考虑解决的方法。
文章研究的是液压支架四连杆机构,液压支架四连杆机构是矿上机械——液压支架的关键部件。
文章对四连杆机构和液压支架整体进行了研究。
文章还对四连杆机构的动态特性进行分析,在此过程中运用了SolidWorks中的COSMOSMotion 进行建模和运动仿真。
关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BARLINKAGEDESIGNOFTHEMODELINGANDOPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof。
液压支架四连杆机构的运动分析和优化设计刘刚(河北天择重型机械有限公司,河北邯郸 056200)摘要:利用SolidWorks实现了液压支架二维模型的建立,分析了四连杆机构的运动规律,得到了顶梁前端准确的运动轨迹,并且对四连杆机构进行了优化设计,为液压支架的设计制作提供了方法和经验。
关键词:液压支架;四连杆机构;优化设计kinematics analysis and optimization design of HydraulicSupport’four-bar linkageLIU Gang(Hebei Tianze Heavy Machinery Co.,Ltd.,Handan 056200,China)Abstract:Drew planar models of hydraulic support based on SolidWorks, analyzed kinematics regulation of the four-bar linkage, get accurate kinematics track of canopy,and optimized four-bar linkage,provided the method and experiences for design and manufacture of hydraulic support.Key words: hydraulic support;four-bar linkage;optimization design0 引言液压支架不仅可以维护顶板和工作空间,而且能够推动工作面移动,是煤矿综采工作面的核心设备。
现在普遍采用四连杆机构作为顶梁的稳定机构,经过长期的实践使用,取得了巨大的经济效益,彻底解决了支撑式液压支架稳定性差的问题。
四连杆机构是液压支架最重要的连接部件,它控制顶梁沿近似双纽线的轨迹运动,大大缩小梁端距的变化量,提高了顶板管理性能。
Link mechanismLinkages include garage door mechanisms, car wiper mechanisms, gear shift mechanisms. They are a very important part of mechanical engineering which is given very little attention...A link is defined as a rigid body having two or more pairing elements which connect it to other bodies for the purpose of transmitting force or motion . In every machine, at least one link either occupies a fixed position relative to the earth or carries the machine as a whole along with it during motion. This link is the frame of the machine and is called the fixed link.An arrangement based on components connected by rotary or sliding interfaces only is called a linkage. These type of connections, revolute and prismatic, are called lower pairs. Higher pairs are based on point line or curve interfaces.Examples of lower pairs include hinges rotary bearings, slideways , universal couplings. Examples of higher pairs include cams and gears.Kinematic analysis, a particular given mechanism is investigated based on the mechanism geometry plus factors which identify the motion such as input angular velocity, angular acceleration, etc. Kinematic synthesis is the process of designing a mechanism to accomplish a desired task. Here, both choosing the types as well as the dimensions of the new mechanism can be part of kinematic synthesis.Planar, Spatial and Spherical MechanismsA planar mechanism is one in which all particles describe plane curves is space and all of the planes are co-planar.. The majority of linkages and mechanisms are designed as planer systems. The main reason for this is that planar systems are more convenient to engineer. Spatial mechanisma are far more complicated to engineer requiring computer synthesis. Planar mechanisms ultilising only lower pairs are called planar linkages. Planar linkages only involve the use of revolute and prismatic pairsA spatial mechanism has no restrictions on the relative movement of the particles. Planar and spherical mechanisms are sub-sets of spatial mechanisms..Spatial mechanisms / linkages are not considered on this pageSpherical mechanisms has one point on each linkage which is stationary and thestationary point of all the links is at the same location. The motions of all of the particles in the mechanism are concentric and can be repesented by their shadow on a spherical surface which is centered on the common location..Spherical mechanisms /linkages are not considered on this pageMobilityAn important factor is considering a linkage is the mobility expressed as the number of degrees of freedom. The mobility of a linkage is the number of input parameters which must be controlled independently in order to bring the device to a set position. It is possible to determine this from the number of links and the number and types of joints which connect the links...A free planar link generally has 3 degrees of freedom (x , y, θ ). One link is always fixed so before any joints are attached the number of degrees of freedom of a linkage assembly with n links = DOF = 3 (n-1)Connecting two links using a joint which has only on degree of freedom adds two constraints. Connecting two links with a joint which has two degrees of freedom include 1 restraint to the systems. The number of 1 DOF joints = say j 1 and the number of joints with two degrees of freedom = say j 2.. The Mobility of a system is therefore expressed as mobility = m = 3 (n-1) - 2 j 1 - j 2Examples linkages showing the mobility are shown below..A system with a mobility of 0 is a structure. A system with a mobility of 1 can be fixed in position my positioning only one link. A system with a mobility of 2 requires two links to be positioned to fix the linkage position..This rule is general in nature and there are exceptions but it can provide a very useful initial guide as the the mobility of an arrangement of links...Grashof's LawWhen designing a linkage where the input linkage is continuously rotated e.g. driven by a motor it is important that the input link can freely rotate through complete revolutions. The arrangement would not work if the linkage locks at any point. For the four bar linkage Grashof's law provides a simple test for thisconditionGrashof's law is as follows:For a planar four bar linkage, the sum of the shortest and longest links cannot be greater than the sum of the remaining links if there is to becontinuous relative rotation between two members.Referring to the 4 inversions of a four bar linkage shown below ..Grashof's law states that one of the links (generally the shortest link) will be able to rotate continuously if the following condition is met...b (shortest link ) + c(longest link) < a + dFour Inversions of a typical Four Bar LinkageNote: If the above condition was not met then only rocking motion would be possible for any link..Mechanical Advantage of 4 bar linkageThe mechanical advantage of a linkage is the ratio of the output torque exerted by the driven link to the required input torque at the driver link. It can be proved that the mechanical advantage is directly proportional to Sin( β ) the angle between the coupler link(c) and the driven link(d), and is inversely proportional to sin( α ) the angle between the driver link (b) and the coupler (c) . These angles are not constant so it is clear that the mechanical advantage is constantly changing.The linkage positions shown below with an angle α = 0 o and 180 o has a near infinite mechanical advantage. These positions are referred to as toggle positions. These positions allow the 4 bar linkage to be used a clamping tools.The angle β is called the "transmission angle".As the value sin(transmission angle) becomes small the mechanical advantage of the linkage approaches zero. In these region the linkage is very liable to lock up with very small amounts of friction. When using four bar linkages to transfer torque it is generally considered prudent to avoid transmission angles below 450 and 500.In the figure above if link (d) is made the driver the system shown is in a locked position. The system has no toggle positions and the linkage is a poor design Freudenstein's EquationThis equation provides a simple algebraic method of determining the position of an output lever knowing the four link lengths and the position of the input lever. Consider the 4 -bar linkage chain as shown below..The position vector of the links are related as followsl1 + l2 + l3 + l4 = 0Equating horizontal distancesl 1cos θ 1 + l 2cos θ 2 + l 3cos θ 3 + l 4cos θ 4 = 0Equating Vertical distancesl 1sin θ 1 + l 2sin θ 2 + l 3sin θ 3 + l 4sin θ 4 = 0Assuming θ 1 = 1800then sin θ 1= 0 and cosθ 1 = -1 Therefore- l 1 + l 2cosθ 2 + l 3cosθ 3 + l 4cos θ 4 = 0and .. l 2sin θ 2 + l 3sin θ 3 + l 4sin θ 4 = 0Moving all terms except those containing l 3 to the RHS and Squaring both sidesl 32 cos 2θ 3 = (l 1 - l 2cos θ 2 - l 4cos θ 4 ) 2l 32 sin 2θ 3 = ( - l 2sin θ 2 - l 4sin θ 4) 2Adding the above 2 equations and using the relationshipscos ( θ 2 - θ 4) = cos θ 2cos θ 4+ sin θ 2sin θ 4 ) and sin2θ + cos2θ = 1the following relationship results..Freudenstein's Equation results from this relationship asK 1cos θ 2 + K2cos θ 4 + K 3= cos ( θ 2 - θ 4 )K1 = l1 / l4K2 = l 1 / l 2K3 = ( l 32 - l 12 - l 22 - l 2 4 ) / 2 l 2 l 4This equation enables the analytic synthesis of a 4 bar linkage. If three position of the output lever are required corresponding to the angular position of the input lever at three positions then this equation can be used to determine the appropriate lever lengths using three simultaneous equations...Velocity Vectors for LinksThe velocity of one point on a link must be perpendicular to the axis of the link, otherwise there would be a change in length of the link.On the link shown below B has a velocity of v AB= ω.AB perpendicular to A-B." The velocity vector is shown...Considering the four bar arrangement shown below. The velocity vector diagram is built up as follows:∙As A and D are fixed then the velocity of D relative to A = 0 a and d are located at the same point∙The velocity of B relative to a is v AB= ω.AB perpendicular to A-B. This is drawn to scale as shown∙The velocity of C relative to B is perpedicular to CB and passes through b∙The velocity of C relative to D is perpedicular to CD and passes through d∙The velocity of P is obtained from the vector diagram by using the relationship bp/bc = BP/BCThe velocity vector diagram is easily drawn as shown...Velocity of sliding Block on Rotating LinkConsider a block B sliding on a link rotating about A. The block is instantaneously located at B' on the link..The velocity of B' r elative to A = ω.AB perpendicular to the line. The velocity of B relative to B' = v. The link block and the associated vector diagram is shown below..Acceleration Vectors for LinksThe acceleration of a point on a link relative to another has two components:∙1) the centripetal component due to the angular velocity of the link.ω 2.Length ∙2) the tangential component due to the angular acceleration of the link....∙The diagram below shows how to to construct a vector diagram for the acceleration components on a single link.The centripetal acceleration ab' = ω 2.AB towards the centre of rotation. The tangential component b'b = α. AB in a direction perpendicular to the l ink..The diagram below shows how to construct an acceleration vector drawing for a four bar linkage.∙For A and D are fixed relative to each other and the relative acceleration = 0 ( a,d are together )∙The acceleration of B relative to A are drawn as for the above link∙The centripetal acceleration of C relative to B = v 2CB and is directed towards B ( bc1 )∙The tangential acceleration of C relative to B is unknown but its direction is known∙The centripetal acceleration of C relative to D = v 2CD and is directed towards d( dc2)∙The tangential acceleration of C relative to D is unknown but its direction is known.∙The intersection of the lines through c1 and c 2 locates cThe location of the acceleration of point p is obtained by proportion bp/bc =BP/BC and the absolute acceleration of P = apThe diagram below shows how to construct and acceleration vector diagram for a sliding block on a rotating link..The link with the sliding block is drawn in two positions..at an angle dωThe velocity of the point on the link coincident with B changes from ω.r =a b 1to ( ω + dω) (r +dr) = a b 2The change in velocity b1b2has a radial component ωr d θ and a tangential component ωdr + r dωThe velocity of B on the sliding block relative to the coincident point on the link changes from v = a b 3 to v + dv = a b 4.The change in velocity = b3b4 which has radial components dv and tangential components v d θThe total change in velocity in the radial direction = dv- ω r d θRadial acceleration = dv / dt = ω r d θ / dt = a - ω2 rThe total change in velocity in the tangential direction = v dθ + ω dr + r αTangential acceleration = v dθ / dt + ω dr/dt + r d ω / dt= v ω + ω v + r α = α r + 2 v ωThe acceleration vector diagram for the block is shown belowNote : The term 2 v ω representing the tangential acceleration of the block relative to the coincident point on the link is called the coriolis component and results whenever a block slides along a rotating link and whenever a link slides through a swivelling block连杆机构连杆存在于车库门装置,汽车擦装置,齿轮移动装置中。
第30卷第5期2009年 5月煤 矿 机 械Coa lM ine M ach i n er yV o.l 30N o .5M ay .2009液压支架四连杆机构优化设计及运动仿真*叶铁丽,李 民,刘欣丽(山东科技大学,山东青岛266510)摘 要:液压支架的性能与其四连杆机构结构参数的设计有密切关系。
以支架升降架时顶梁前端点与煤壁距离的变化量最小为目标,以最小二乘法作为核心算法,通过计算机优选法进行液压支架四连杆机构结构参数的优化设计,并通过ADAM S 仿真软件建立液压支架的简化模型对其进行运动仿真,获得了较理想的结果。
关键词:四连杆机构;优化设计;仿真;最小二乘法中图分类号:TD355 文献标志码:A 文章编号:1003-0794(2009)05-0037-03Opti m al D esign of Four -bar M echanis m i n H ydraulic SupportYE T ie -l,i L IM in ,L IU X i n -li(Shandong Science and T echno l ogy U niversity ,Q i ngdao 266510,China)Abst ract :The perfor m ance of hydraulic po w ered suppo rt is close ly re lated to the design quality of four-bar m echanis m.The opti m al synthesis o f a four-bar m echan is m w as discussed and t h e ob j e ctive is to deter m i n e the opti m al values of the m echan is m li n k leng t h s ,to m ini m ize the variation of the d i s tannce be t w een t h e front-end o f the top bea m and the coa.l The pr ocedure uses the m ethod of least squares as a core algo rithm .A dyna m ic si m u l a ti o n w as m ade i n ADAM S and the resu lt w as re lative ly perfec.t K ey w ords :four-bar m echan is m;opti m a l desi g n ;dyna m ic si m ulation ;least squaresm et h od * 十一五 国家科技支撑计划项目 煤矿复杂条件综采工作面关键设备研究 (2006BAA 11B 05);山东科技大学科学研究 春蕾计划 项目(2008AZZ034)0 引言近年来,随着有限元法、可靠性设计、CAD 理论的发展,工程设计逐步向自动化、集成化、智能化方向发展。
液压支架四连杆机构设计分析摘要:针对一种液压支架四连杆机构的进行分析设计,完成一款满足现场使用的液压支架结构。
首先利用经验分析的方法确定方案,然后利用传统方法进行机构设计,再利用Simulink 进行机构的运动精度验证和优化校正,最终实现对机构参数的影响因素探明和达到设计效果。
关键词:液压支架;四连杆机构;设计分析1引言液压支架是一个多连杆机构,整个液压支架连杆机构的运动取决于顶梁、底座和前、后连杆组成的四连杆机构。
四连杆机构作为液压支架机构组成,不仅具有约束位移的作用,还应有提高支架的稳定性和其他功能,所以对支架系统简化而出的四连杆机构作分析和设计是十分必要的。
2液压支架连杆机构的几何特性液压支架的简化图,如下图1示。
连杆机构有且仅有一个自由度,可以通过立柱和均衡千斤顶约束这个仅存的自由度,让连杆机构实现定位支撑和稳定机架的功能。
液压支架简化图承载的过程中需要顶梁保持水平,所以顶梁的主要承载防护能力将和E点的位置相关联。
在设计液压支架的时候需要重点研究去掉顶梁、立柱和均衡千斤顶后的四连杆机构,该机构由底座、前后连杆和掩护梁组成。
依照四连杆机构的运行轨迹经验,在保证顶梁水平的同时,E点和顶梁前点的轨迹类似于一条S形曲线,使用中如果这条S型曲线的水平误差e越大,越不利于支撑护顶。
所以需要合理的设计机构参数,控制顶梁前端的水平误差e 。
另外,四连杆机构不仅具有定位功能,同时兼备支撑防护和放顶煤的功能,所以需要对机构各杆件的行程做出一定的约束,这也是液压支架四连杆设计的主要约束条件。
(1)支架在HMAX与HMIN之间升降时,为了保证可靠的支护范围,顶部梁前端与煤壁间的距离e变化应该小于0.1m,最优取值为0.07m左右。
(2)支架在HMAX与HMIN,对顶梁与掩护梁之间的夹角P以及后部连杆与底端平面的夹角Q要求如下:支架在HMAX时,为防止连杆机构发生摩檫力条件下的自锁行为需要对掩护梁和后连杆的垂向夹角做出一定的约束,按照工程设计经验一般要求PMAX=52~62°,QMAX=75~85°。
原文出自:Oblak M, Harl B, Butinar B. Optimal design of hydraulic support[J]. Structural and Multidisciplinary Optimization, 2000, 20(1): 76-82.中文译文液压支架的最优化设计摘要:本文介绍了从两组不同参数的采矿工程所使用的液压支架(如图1)中选优的流程。
这种流程建立在一定的数学模型之上。
第一步,寻找四连杆机构的最理想的结构参数以便确保支架的理想的运动轨迹有最小的横向位移。
第二步,计算出四连杆有最理想的参数时的最大误差,以便得出最理想的、最满意的液压支架。
图1 液压支架关键词:四连杆机构;优化设计;精确设计;模糊设计;误差1.前言:设计者的目的时寻找机械系统的最优设计。
导致的结果是一个系统所选择的参数是最优的。
一个数学函数伴随着一个合适的系统的数学模型的出现而出现。
当然这数学函数建立在这种类型的系统上。
有了这种数学函数模型,加上一台好的计算机的支持,一定能找出系统最优的参数。
Harl描述的液压支架是斯洛文尼亚的Velenje矿场的采煤设备的一个组成部分,它用来支护采煤工作面的巷道。
它由两组四连杆机构组成,如图2所示.四连杆机构AEDB控制绞结点C 的运动轨迹,四连杆机构FEDG 通过液压泵来驱动液压支架。
图2中,支架的运动,确切的说,支架上绞结点C 点竖向的双纽线的运动轨迹要求横向位移最小。
如果不是这种情况,液压支架将不能很好的工作,因为支架工作在运动的地层上。
实验室测试了一液压支架的原型。
支架表现出大的双纽线位移,这种双纽线位移的方式回见少支架的承受能力。
因此,重新设计很有必要。
如果允许的话,这会减少支架的承受能力。
因此,重新设计很有必要。
如果允许的话,这种设计还可以在最少的成本上下文章。
它能决定去怎样寻找最主要的图2 两四连杆机构四连杆机构数学模型AEDB 的最有问题的参数421,,a a a 。
液压支架中英文对照外文翻译文献(文档含英文原文和中文翻译)液压支架的优化设计摘要:本文描述了程序优化测定两组参数的液压支架用于采矿业。
这个过程是基于数学规划方法。
在第一步中,一些参数的最优值领先的四连杆机构以确保被发现所需的运动的支持以最小的横向位移。
在第二步中,最大公差最优值的主要四连杆机构计算,所以响应对液压支架将是令人满意的。
关键词:四连杆机构、优化、最大公差、液压支架1、介绍设计师的目的是找到最好的机械设计机器系统考虑。
努力的一部分是最优的选择一些选定参数的一个系统。
如果一个合适的数学模型的系统可以使用方法数学编程。
当然,它取决于液压系统的类型。
这个方法,保证良好的计算机支持寻找最佳参数的系统。
在液压支架(图1)被拖(1998)是一个部分的矿业设备,我的VelenjeSlovenia:用于保护在画廊工作环境。
它由两个四连杆机制和AEDB FEDG如图。
2。
AEDB机制定义了路径的耦合器点萤石FEDG机制用于驱动支持由一个液压执行机构。
图、一液压支架运动的支持是必须的,更多更准确地说,运动的点C在图2,是垂直与最小的横向位移。
如果不是这种情况,在液压支架将不能正常工作。
因为它是困在切除地球机中的。
一个原型的液压支架是测试一个实验室(Grm 1992)。
表现出很大的支持横向位移,这将减少其就业能力。
因此,一个设计是必要的。
这个项目应该改进如果能以最小成本。
这是决定找到最佳值参数最成问题的a1、a2、a4领先的四连杆机构与方法的数学AEDB选用。
否则将需要改变项目,至少AEDB机制是这样的。
以上问题的解决将给我们回应的液压支架的理想系统。
其实真正反应会有所不同,由于公差的各种参数的系统,这就是为什么最大允许公差参数a1、a2、a4计算方法的帮助下而运用数学规划。
图、二两个四连杆机制2、确定性模型的液压支架首先有必要开发一个适当的机械模型的液压支架。
它可能是基于以下假设:1.这个链接必须是刚体2.运动的个人链接速度相对慢液压支架是一种机制与一个自由度。
液压支架学生姓名:专业班级:机制07级09班指导教师:机电学院2011年3月12日液压支架的最优设计摘要:这篇文章描述了两种在矿业行业中设计液压支架参数的最佳方法。
这种方法是基于数学规程的设计方式。
第一步,确保了支架四连杆机构在横向空间内预期移动最主要的参数。
第二步,计算出了四连杆机构最大偏差的最主要的参数,如此便可设计出的液压支架。
关键字:四连杆机构,最优设计,数学方程,近似方式,偏差。
1.绪论:设计者打算为被考虑的机械系统找到最好的设计。
这努力的一部份是挑选系统的最佳叁数。
如果能使用一个合适的系统数学模型,可以使用数学上规画的方法。
当然,它取决于系统的类型。
基于这个公式,好的计算机软件能保证找到最佳的系统参数。
此处被作者描述的液压支架是关于矿业产业中煤矿设备的一种。
Fig. 1 Hydraulic supportVelenje-斯洛文尼亚,为保护矿坑中的工作环境,他考虑使用如图2所示的双四连杆机构。
机器AEDB决定了C点联结器运动的路径并且机器FEDG通过液压执行机构控制支架。
这样就要求支架的运动更加的精确图2中C点的运动在垂直位移上有最小的横向变位。
如果不是这种情况,支架将不会正常的工作,因为它的运动是基于以上因素决定的。
在一个实验室中测试了一种原始型号的液压支架。
这种支架展现了大的 ransversal 变位,减少了它的可用范围。
因此必须重新设计一种新型的支架。
新的方案将尽可能的花费少的资金来改善原先的支架。
设计人员决定使用数学上规画的方法找出引导四连杆机构AEDB运动最关键最复杂的叁数a1,a2,a4。
否则必须改变这个计划,至少要改变四连杆机构AEDB。
解决了以上问题我们将得到理想的液压支架系统。
因为系统的各种叁数的偏差实际的情况和理想的运动轨迹将有一定的偏差,这就是为什么叁数a1,a2,a4被允许的最大误差将会由数学上规画的方法辅助计算。
Two four-bar mechanisms2.液压支架形式的确定首先必须发展一个合适的液压支架机械形式。
外文原文:
中文译文:
大倾角液压支架四连杆机构的设计
摘要:四连杆机构是液压支架起保护作用的重要组件之一。
在大倾角液压支架的设计中,ADAMS 被第一次用在了参数化模型、仿真和最优化的求解过程中,然后根据三维尺寸模型,通过COSMOS/Works 对顶梁的前向扭转载荷进行有限元分析。
用这种方法得到的结果验证了四连杆机构设计的可行性,而且非常好得满足了要求。
这种方法提高了液压支架的设计效率,缩短了设计周期。
关键词:液压支架;四连杆机构;优化设计;ADAMS ;有限元分析
1简介
四连杆机构是液压支架起保护作用的重要组件之一。
它主要有两方面的功能:第一,为了在立柱伸缩过程中,能保持顶梁垂直的移动,因此需要在顶梁和煤壁之间保持稳定的距离。
四连杆机构被视为最能满足这种要求的。
第二,它保证了支架能够承受一定的水平载荷。
在设计大倾角液压支架的过程中,四连杆机构的优化设计是一项十分重要的任务。
它的结构尺寸将直接影响到支架的性能状况。
在传统的设计过程中,经常使用的是BASIC 编程,但是结果经常不能满足设计的要求,也不能获得最优解。
现在,ADAMS 被越来越广泛得应用到机械动态设计过程中。
因此,本文就是运用ADAMS 对四连杆机构进行建模和仿真,进而获得最优解。
为了验证四连杆机构设计的可行性,用COSMOS/WORKS 进行了有限元分析。
2四连杆机构尺寸计算
图1是支架在最大支撑高度的状态下,对四连杆机构尺寸作出的假设:
2211111;;;;;;;;;
;;tan .o a A ab B cb C cd D o d E ae G A B S e b F Jo S Je L I I U G G L θ=============
图1:四连杆机构的参数
2.1 后连杆和掩护梁尺寸的计算
如图2,如果H1确定了,可得到掩护梁的尺寸:
1
11sin()sin()
H G P I Q =+⋅ (1)
后连杆尺寸为:
A I G =⋅(2)
前后连杆绞点之间的距离为:
1B I G =⋅ (3)
前连杆最高点和掩护梁最高点之间的距离为:
F G B =-(4)
后连杆底部和坐标原点之间的距离是E1,如图二所示。
图2:四连杆机构的几何关系
2.2 前连杆长度和尺寸的计算
1)b1点坐标
当支架处于最高位置H1时,b1点坐标为:
11cos()x F P =⋅ (5) 111sin()y H F P =-⋅(6)
2)b2点坐标
当支架处于最低位置H2时,b2点坐标为:
22cos()x F P =⋅(7)
222sin()sin()y B P A Q =⋅-⋅(8)
根据几何学要求,当支架处在最低位置时,必须保证Q2≥25°~ 30°,这里假设Q2为25°,
212arctan cos()
P =+⋅(9)
3)b3点坐标
当后连杆和掩护梁处于垂直位置时,b3点坐标为:
33cos()x F P =⋅(10)
333sin()sin()y B P A Q =⋅-⋅
(11)
3(arctan arctan 2E A
P G π
=-+(12)
332
Q P π
=
- (13)
4)c 点坐标
因为前连杆长度不会发生变化,所以==123cb cb cb ,故而通过圆的方程可求出c 点坐标:
2222222231312323233131233123()()()()2[()()()()]
c x x y y y y x x y y y y x x x y y y y x x -+-⋅---+-⋅-=-⋅---⋅-(14)
2222222223233131312331233123()()()()
2[()()()()]
c
x x y y x x x x y y x x y x x y y y y x x -+-⋅---+-⋅-=
-⋅---⋅-(15)
前连杆的长度和角度便可以通过c 点坐标来获得。
2.3 D (cd )、E (o2d )长度的计算
当得到c 点坐标后,D 、E 长度为:
c D y = (16)
1c E E x =- (17)
把顶梁端点的运动轨迹为斜线作为目标函数,通过程序的到的结果如下所示:
θ=tan 0.338= 175.10Q = 229.98Q = 159.96P = 215.09P
988.78A mm =295.56B mm =995.82C mm =367.30D mm =
421.91E mm =1343.45G mm =
3四连杆机构尺寸参数的优化
通过图1对尺寸的定义和程序计算得到的结果,便可以通过ADAMS/VIEW 对四连杆机构进行建模。
通过分析仿真结果可知,计算机程序得到的尺寸参数并不是最佳结果,所以应当通过参数化建模的方法来获得最佳结果,更好的满足设计要求。
在参数化建模的过程中,每一个绞点都被认为是变量,通过对变量结果的分析来来得到设计结果,如表1所示:
表1. 每个变量的设计结果
从表1中可以获得设计变量的变化范围和灵敏度。
MSC.ADAMS/VIEW 可以为调查报告提供各种变化的情况,这其中就包括了灵敏度的变化。
如表1,DV-1、DV-2、DV-4、DV-6的灵敏度最大,说明这四个量对优化结果的影响最大。
四个敏感点确定以后,通过对设计变量变化曲线的比较,来取得最佳的设计结果。
通过运行最优化程序,四个设计变量得到了最优化。
最后,通过分析和计算得到四连杆机构的最佳模型尺寸。
157.59Q = 224.90Q = 146.40P = 990A mm =
260B mm =1125C mm =265D mm =478E mm =1155G mm =
借助ADAMS 软件,根据计算得到的尺寸对四连杆机构进行建模,然后通过仿真轨迹对绞点进行分析,如图3所示。
图3.优化后的轨迹曲线
分析可知,优化后的结果充分的满足了液压支架的设计要求。
4液压支架的有限元分析
根据计算得到的四连杆结构尺寸,装配上液压支架的其他部件,便可得到液压支架的三维模型,如图4所示。
利用COSMOS/WORKS 软件,可得到液压支架在正向扭转载荷下的
有限元分析模型。
图4. 液压支架的三维模型
4.1 有限元分析结果
通过运行有限元程序,COSMOS/WORKS将结果以图形的形式显示出来。
结果的图示可以根据需要进行修改。
例如,应力、应变和应力的动态变化,,总体的局部图也可以获得,如图5所示。
(a) 前扭转荷载位移
(b) 前扭转荷载应力
(c) 前扭转荷载应变
(d) 前扭负载局部应力
根据计算结果,液压之架的最大变形量是11.63mm,等效前梁的压力为562.7Mpa,等效应变为3.503E-03。
所有绞点的情况可从表2中看到。
4.2 数据分析
最大的应力应变大概围绕着顶梁,特别是焊接接缝处。
立柱受到的载荷也是不一样的。
前后立柱靠近载荷的一侧受到的应力大于另外一侧。
在载荷的作用下,顶梁前面受到的影响十分明显。
顶梁后面受到了一致的影响。
如果载荷太大的话,整个支架会有一种扭转的趋势。
从表二中可以看出,掩护梁和顶梁的左右铰接点受到的阻力是不一样的。
前连杆和掩护梁、后连杆和掩护梁、后连杆和底座、前连杆和底座受到的阻力是比较大的。
从强度分析可以看出,最大应力的分布是部分区域的。
因此,高强度的钢铁经常用到大应力的区域来提高机械强度。
这种液压支架完全满足实际的使用标准,也符合大倾角的使用条件。
5结语
应用ADAMS软件不仅能进行参数建模、运动轨迹仿真和大倾角液压支架的优化设计,还可以进行动态有限元分析。
通过整个支架的有限元分析,验证了四连杆机构优化设计的可行性,同时得出支架的应力分布状况。
这样设计出来的液压支架完全达到了煤矿的使用
标准,满足了大倾角的使用要求。
这种方法提高了液压支架的设计效率,缩短了设计周期。