基于液压支架四连杆机构参数特点分析与研究
- 格式:doc
- 大小:16.47 KB
- 文档页数:5
四连杆机构的建模及优化设计关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BARLINKAGEDESIGNOFTHEMODELINGANDOPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof。
Second, the level of support to withstand greater force. This article is to discuss four hydraulic linkage mechanisms.In the article, we study the four-bar linkage hydraulic problems, and can be considered from several aspects of the solution. This paper studies the four hydraulic linkage, hydraulic four-bar linkage is mine machinery - the key hydraulic components. Article on the four-bar linkage and hydraulic support the overall studied.Paper also the dynamic characteristics of four-bar linkage analysis, in the process of the Application of the SolidWorks COSMOSMotion in modeling and motion simulation.KEYWARDS:Four-link,SolidWorks,COSMOSMotion, motion simulation.目录摘要IABSTRACTII1.1引言11.2 SolidWorks软件简介11.2.1 SolidWorks功能描述11.2.2 CAD技术概述31.2.3 CAD系统41.2.4 CAD技术的应用41.2.5 COSMOSmotion简介62四连杆机构建模72.1四连杆机构的作用72.2四连杆机构的几何作图法82.3 四连杆机构优选方法122.3.1 目标函索的确定122.3.2 四连杆机构的几何特征122.4运用SolidWorks建立四连杆机构模型122.5 本章小结153 对四连杆机构进行COSMOSMotion运动分析163.1COSMOSMotion软件的应用163.2四连杆机构的运动仿真过程173.2.1选择马达和设置马达参数183.2.2仿真机构的运动设置193.2.3 仿真机构的参数设置193.3 仿真数据处理20结论33参考文献34致谢351绪论1.1引言液压传动时一项新兴技术,他被引用到工业领域只有很短的时间,液压支架已广泛应用于我国煤矿井下支护,它具有初撑力大、恒阻、安全和高效等特性,是适合我国国情的一种有效的工作面支护设备。
支架机构形式的比较分析液压支架主要的机构形式有三种,即垛式支架,四连杆机构液压支架,和单摆杆机构液压支架。
现分别介绍几种形式液压支架的特点。
垛式液压支架的特点垛式液压支架式支撑式液压支架的一种。
支撑式液压支架是在一个底座上放置几根立柱支撑顶梁,并通过顶梁支撑顶板这样简单的结构基础上发展起来的。
垛式支架的优点是:垂直支撑的立柱数量多,支架的工作阻力大;多数立柱位于支架后部,切顶性能好,工作空间大,易满足通风和行人的要求,重量轻,价格便宜。
其缺点是:顶梁较长,移架时空顶面积较大;同一段顶梁受到的垂直支撑的次数较多,不利于顶板的管理,挡矸帘的强度低,顶板碎矸还可以从架间落入工作空间,防矸能力弱。
所以垛式支架应在直接顶稳定或坚硬的煤层中使用。
由此可见,垛式液压支架虽然有很多的优点,但却存在它的弊端,并不是我们理想的架型。
四连杆机构液压支架这种液压支架是目前使用最多的液压支架。
不论是支撑式还是掩护式液压支架都一般都用到了这种机构。
四连杆机构使顶板对顶梁的水平载荷由掩护梁传递给两个连杆,立柱不承受横向力,因此不易产生弯曲现象。
因此,要求连杆要有足够的强度。
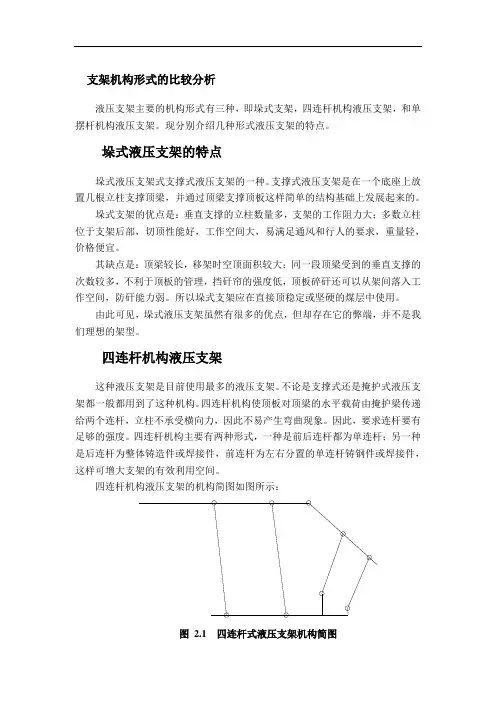
四连杆机构主要有两种形式,一种是前后连杆都为单连杆;另一种是后连杆为整体铸造件或焊接件,前连杆为左右分置的单连杆铸钢件或焊接件,这样可增大支架的有效利用空间。
四连杆机构液压支架的机构简图如图所示:图 2.1 四连杆式液压支架机构简图这种机构使支架在升降的过程中,顶梁前端的轨迹为一条双纽线。
双纽线支架的两个连杆虽然增加了支架结构的稳定性,但也因要抵抗顶板的水平运动大大增加了对支架承载机构件的作用力,结构使构件断面增大,重量增加。
而掩护式和支撑掩护式支架的进一步发展方向之一是寻求减轻支架重量的途径。
因此,这种机构虽然广泛使用,但仍旧不是我们理想的一种架型。
单摆杆机构液压支架这种支架是由四连杆机构液压支架演化而成的一种支架机构形式。
它用一个单摆杆机构代替了传统的四连杆机构,从而使支架在升降的过程中顶梁前端的轨迹由双扭线变成了一条圆弧线。
317现有的先进计算机科学技术已普遍应用于煤矿设备的设计、制造、监测中,例如可视化编程技术、数据库技术在液压支架连杆结构参数的设计上已得到了较好的运用。
由于井下作业工况复杂多变,液压支架作为采煤作业时的主要受载设备,其结构参数是否合理决定着采煤作业的效率和安全,因此文章基于 C++ 可视化编程语言,对液压支架的四连杆机构参数进行了运动学仿真和设计,获取连杆机构的运动规律,并得到了参数设计结果。
该方法具有的优点是:程序编写和测试完成后,再进行同类型的连杆设计时,只需修改相应的约束参数即可获得设计结果,计算成本小且计算速度快,也对其他煤矿设备的结构参数设计具备一定的借鉴意义。
1 液压支架四连杆机构的运动学简析目前通常采用两个参数为前提来进行运动学分析:以液压支架的工作高度为基础、以后连杆与水平方向夹角大小的改变量为基础。
根据现有研究的结果表明,液压支架的工作高度对整个结构系统影响尤为重大,一般来说液压支架的工作高度发生改变后,四连杆机构的运动学参数会产生较大幅度的变化,同时各连杆的受力状态也会发生大幅改变。
因此,要对液压支架进行运动学分析。
2 四连杆机构运动仿真模型的建立图 1 所示为四连杆机构的运动仿真几何模型。
图1 四连杆机构运动仿真几何模型图1中:a 为后连杆长;b 为前连杆、后连杆分别与掩护梁 E’ 点的距离差;c 为前连杆长;d 为两连杆间在竖直方向上的距离;e 为两连杆间在水平方向上的距离;e1 为后连杆、掩护梁在水平方向上的距离;f 为前连杆与顶梁的距离;t 为掩护梁长。
运动仿真模型的建立主要分为三部分,分别是:设计变量的确定;目标函数的建立;约束条件的设定。
1)设计变量的确定。
如图 1所示,四连杆机构的运动仿真包含 8 个结构几何参量:a、b、c、d、e、f、g、e1,其中 t 为 b 与 f 之和,将其作为次计算的优化变量,则有 X=[a b c d e f]=[X1 X2 X3 X4 X5 X6]。
目录第一章.绪论 (2)第二章.曲柄摇杆机构2.1铰链四连杆机构有整转副的条件 (3)2.2急回特性 (5)2.3传动角与压力角 (7)2.4死点位置 (8)第三章.铰链四连杆的类型 (9)3.1曲柄摇杆机构 (9)3.2双曲柄结构 (10)3.3双摇杆机构 (11)第四章.机械加工振动 (12)4.1振动对机械加工过程的影响 (12)4.2机械加工中的自激振动 (13)4.2.1自激振动的特点 (15)4.2.2控制自激振动的途径 (15)4.3机械加工中的受迫振动 (19)4.3.1自激振动的特点 (19)4.3.2减少受迫振动的途径 (20)第五章.小结 (22)参考文献 (23)第一章.绪论连杆机构的最基本形式是平面四杆机构,它是其它连杆机构的基础。
所以,对平面四杆机构进行研究可以概括连杆机构内在的基本原理,从而用以连杆机构的设计。
在各种机构型式中,连杆机构的特点表现为具有多种多样的结构和多种多样的特性。
仅就平面连杆机构而言,即使其连杆件数被限制在很少的情况下,大量的各种可能的结构型式在今天仍难以估计。
它们的特性在每一方面是多种多样的,以致只能将其视为最一般形式的机械系统。
在古代和中世纪许多实际应用方面的发明中就有连杆机构,例如我国东汉时期张衡发明的地震仪、列奥纳多•达•芬奇所描述的椭圆车削装置等,在这些发明中,都巧妙地应用了平面连杆机构。
在近代,随着工业越来越高度自动化,在大量的自动化生产线上,许许多多的连杆机构得到了应用。
特别是机器人学成为目前一个前沿学科,连杆机构又有了新的应用,例如日本等国家开发的类人型机器人等。
在仿生学上,连杆机构巧妙地实现了人类关节的功能,例如国外研制的六杆假肢膝关节机构。
当今,工业生产自动化程度越来越高,连杆机构以及它与其它类型的机构组成的组合机构将得到更加广泛的应用,特别是形状丰富多样的连杆曲线将应用在更多的场合中第二章.曲柄摇杆机构2.1铰链四连杆机构有整转副的条件图示曲柄摇杆机构中,设各杆长度依次为l1、l2、l3、l4,且l1<l4。
液压支架四连杆机构运动学分析周保卫【摘要】根据液压支架四连杆机构的几何关系和尺寸参数,建立了以前连杆水平倾角为自变量的液压支架四连杆机构运动分析通用数学模型.利用牛顿-辛普森算法确定各连杆的角度.通过编制MATLAB程序求解得到掩护梁与顶梁铰接点运动轨迹,以及各连杆运动参数随前连杆角度的变化规律,为液压支架的优化设计奠定了基础.【期刊名称】《煤矿机电》【年(卷),期】2018(000)004【总页数】4页(P78-80,83)【关键词】液压支架;四连杆机构;运动学【作者】周保卫【作者单位】阳泉煤业集团有限责任公司,山西阳泉045000【正文语种】中文【中图分类】TD355.410 引言液压支架是综合机械化采煤的重要设备,它可有效支撑和控制采煤工作面的顶板,并可隔离采空区,以防止矸石进入工作区域和输送机内,其性能和可靠性对综采成败影响重大。
液压支架四连杆机构是液压支架整体设计的重要环节,如图1中的虚线框所示,它主要由前连杆、后连杆、底座和掩护梁构成,其主要作用是保证支架在支撑顶板恒阻状态时纵向和横向的稳定性,作为主要承受和传递外载荷的部件,也保证了液压支架整体的刚度要求[1]。
因此,对液压支架四连杆机构的分析和研究很有必要。
液压支架的设计要求顶梁前端点的运动轨迹呈双摆线或近似直线,同时要求支架在整个伸缩范围内顶梁前端点运动轨迹的最大宽度尽可能小[2]。
由图1可知,四连杆机构设计的好坏决定了顶梁运动的轨迹,也决定了支架轮廓尺寸的变化。
因此,需要对液压支架四连杆机构进行运动学分析,计算顶梁与掩护梁铰接点的运动轨迹,进而为整体结构的优化设计奠定基础[3]。
对于液压支架四连杆机构的运动学分析,目前主要采用作图法或基于虚拟技术的仿真法[4]。
本文给出了一种求解液压支架四连杆机构运动学分析的解析法,以液压支架前连杆的水平倾角为自变量,推导出支架升降过程中顶梁与掩护梁铰接点坐标计算模型,同时可得到各连杆运动参数随前连杆倾角的变化规律。
本科毕业设计说明书四连杆机构的建模及优化设计FOUR-BAR LINKAGE DESIGN OF THE MODELING AND OPTIMIZATION学院(部):专业班级:学生姓名:指导教师:2010年 5 月31 日四连杆机构的建模及优化设计摘要四连杆是掩护式支架和支撑掩护式支架的最重要部件之一,其作用概括起来主要有两。
一是当支架由高到低变化时,借助四连杆机构使支架顶梁前端点的运动轨迹近似双纽线。
从而使支架顶梁前端点与煤壁间距离的变化大大减小,提高了管理顶板的性能;二是使支架承受较大的水平力。
这篇文章就是讨论液压支架四连杆机构的。
在文章里,我们研究了液压支架四连杆机构所面临的问题,及可以从几个方面考虑解决的方法。
文章研究的是液压支架四连杆机构,液压支架四连杆机构是矿上机械——液压支架的关键部件。
文章对四连杆机构和液压支架整体进行了研究。
文章还对四连杆机构的动态特性进行分析,在此过程中运用了SolidWorks中的COSMOSMotion进行建模和运动仿真。
关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BAR LINKAGE DESIGN OF THEMODELING AND OPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof; Second, the level of support to withstand greater force. This article is to discuss four hydraulic linkage mechanisms.In the article, we study the four-bar linkage hydraulic problems, and can be considered from several aspects of the solution. This paper studies the four hydraulic linkage, hydraulic four-bar linkage is mine machinery - the key hydraulic components. Article on the four-bar linkage and hydraulic support the overall studied.Paper also the dynamic characteristics of four-bar linkage analysis, in the process of the Application of the SolidWorks COSMOSMotion in modeling and motion simulation.KEYWARDS:Four-link, SolidWorks, COSMOSMotion, motion simulation.。
第一章绪论 (2)1.1 研究意义 (2)1.2振动特性的研究现状 (2)第二章.四连杆机构介绍 (3)2.1基本概念 (3)2.2 平面四杆机构的基本特性 (4)2.2.1曲柄存在条件(格拉肖夫条件) (4)2.2.2急回特性及行程速比系数K (5)2.2.3压力角和传动角 (7)2.2.4 死点 (8)第三章四连杆机械振动的特性 (10)3.1 机械加工振动的表现和特点 (10)3.1.1 强迫振动 (11)3.1.2自激振动 (11)3.2振动产生的原因分析 (12)3.2.1强迫振动产生的原因 (12)3.2.2自激振动产生的原因 (12)3.3预防措施 (13)3.3.1预防强迫振动的途径 (13)3.3.2预防自激振动的途径 (13)第四章四连杆机械振动的控制策略 (14)4.1研究现状 (14)4.1.1振动被动控制 (14)4.1.2振动主动控制 (15)4.1.3振动混合控制 (18)4.2 结论 (18)第五章小结 (18)致谢 (20)参考文献 (20)第一章绪论1.1 研究意义四连杆机构在通用机械、纺织、食品、印刷等工业领域有着广泛的应用,是机构运动弹性动力学的一个主要研究对象。
连杆机构高速运行时,在外力与惯性力作用下,构件会发生不可忽略的振动。
为提高轨迹精度,减小振动,使机构能够准确、高效的工作,必须对这种有害的振动响应加以控制。
目前基于四连杆机构振动特性分析的机构运动弹性动力学研究正日趋完善,但如何改善机构的动态特性,有效地抑制弹性机构的有害振动,是机构学界面临的一个重要的研究课题。
节约能源和原材料、提高效能是当前世界经济、军事和科技发展面临的关键课题。
目前,从传统的机械制造业到航空航天技术领域、建筑设计、机器人制造等精密机械,低刚度与柔性化是这些领域内结构设计制造的一个重要发展趋势。
这些轻型结构可以增加有效承重载荷的重量,提高运载工具的效率,消耗的能源减少,生产成本降低,运行精度提高。
四连杆机构的建模及优化设计四连杆机构的建模及优化设计摘要四连杆是掩护式支架和支撑掩护式支架的最重要部件之一,其作用概括起来主要有两。
一是当支架由高到低变化时,借助四连杆机构使支架顶梁前端点的运动轨迹近似双纽线。
从而使支架顶梁前端点与煤壁间距离的变化大大减小,提高了管理顶板的性能;二是使支架承受较大的水平力。
这篇文章就是讨论液压支架四连杆机构的。
在文章里,我们研究了液压支架四连杆机构所面临的问题,及可以从几个方面考虑解决的方法。
文章研究的是液压支架四连杆机构,液压支架四连杆机构是矿上机械——液压支架的关键部件。
文章对四连杆机构和液压支架整体进行了研究。
文章还对四连杆机构的动态特性进行分析,在此过程中运用了SolidWorks中的COSMOSMotion 进行建模和运动仿真。
关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BARLINKAGEDESIGNOFTHEMODELINGANDOPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof。
液压支架四连杆机构的运动分析和优化设计刘刚(河北天择重型机械有限公司,河北邯郸 056200)摘要:利用SolidWorks实现了液压支架二维模型的建立,分析了四连杆机构的运动规律,得到了顶梁前端准确的运动轨迹,并且对四连杆机构进行了优化设计,为液压支架的设计制作提供了方法和经验。
关键词:液压支架;四连杆机构;优化设计kinematics analysis and optimization design of HydraulicSupport’four-bar linkageLIU Gang(Hebei Tianze Heavy Machinery Co.,Ltd.,Handan 056200,China)Abstract:Drew planar models of hydraulic support based on SolidWorks, analyzed kinematics regulation of the four-bar linkage, get accurate kinematics track of canopy,and optimized four-bar linkage,provided the method and experiences for design and manufacture of hydraulic support.Key words: hydraulic support;four-bar linkage;optimization design0 引言液压支架不仅可以维护顶板和工作空间,而且能够推动工作面移动,是煤矿综采工作面的核心设备。
现在普遍采用四连杆机构作为顶梁的稳定机构,经过长期的实践使用,取得了巨大的经济效益,彻底解决了支撑式液压支架稳定性差的问题。
四连杆机构是液压支架最重要的连接部件,它控制顶梁沿近似双纽线的轨迹运动,大大缩小梁端距的变化量,提高了顶板管理性能。
基于C语言的液压支架四连杆机构的优化设计随着人类社会的不断进步,机械在我国工业中,占据了首要地位,尤其是自动化信息技术推出以后,机械制造行业更是得到了大规模的发展进程,而液压支架四连杆作为机械操作过程中的主要配件,在借助于C语言软件的情况下,得到了相应的技术提高,本文通过对C语言环境下的液压四连杆机构的分析说明C 语言在整体机械制造中的作用,以及对于液压支架四连杆的重要性,以及优化时的做法。
标签:液压支架;四连杆机构;优化设计在机械制造中,液压支架时必不可少的重要配置,而四连杆机构则是其最重要的组成部分,四连杆设计的优劣程度对液压支架性能的好坏有着决定性的影响。
所谓四连杆机构,其主要功能作用是:当液压支架由高到低发生变化时,四连杆机构辅助液压支架使其顶梁前端点呈近似双纽线形的运动轨迹,进而在一定程度上减小了煤壁与支架顶梁前端点间的距离变化,使支架能承受较大的水平力,提高了支架管理顶板的性能,为了让四连杆机构更加趋于优化,进而保证液压支架的稳定运行,相关人士推出以C语言编程对四连杆进行更改的创举[1]。
1 液压支架四连杆机构的运转定义四连杆在液压支架位于最大支撑高度工作状态下,它由底座、前连杆、后连杆和掩护梁等相关结构组成,支架工作过程中的运动轨迹线是根据四连杆的给出的已知路线,运动轨迹影响着液压支架当时承受的重量及负荷。
而支架在位于某一高度时,就是两条运行轨迹的夹角处,当支架由高到低运行时,迫使角度变小或变大,当角度为正值时,则表示受力值成正比,是液压支架能够承受的有效范围,反之则表示承受压力过大,有可能会造成支架崩塌的危险性。
当顶梁向前运动时,四连杆的滑动轨迹也会有所变化,当液压支架保持在一定的水平程度时,则四连杆机构轨迹保持不变,由此可见,对于液压支架来说,四连杆具有不可替代的作用以及重要性,当然,在日常操作中,相关操作人员也要确保在四连杆轨迹和液压支架都稳定的情况下,方可进行使用[2]。
2 运转优化过程的说明在设计液压支架时,为确保运行在可承受范围内,应使四连杆轨迹全面优化,使液压承受力降到最低。
基于液压支架四连杆机构参数特点分析与研究摘要:本文主要针对液压支架四连杆机构的功能及影响四连杆性能的设计因素进行探索。
其中重点介绍了液压支架四连杆机构的构成及特点,并从影响四连杆参数设计的九个方面进行了详细论述。
关键词:液压支架;四连杆机构;梁端距;掩护梁背角;双扭线中图分类号:TD355 文献标识码:A1 液压支架四连杆机构的构成与功能1.1 液压支架四连杆机构的构成液压支架四连杆机构的构成从表面上看只有前连杆和后连杆,实际上掩护梁和底座是组成四连杆机构的另外一个连杆,掩护梁和底座除了构成四连杆机构以外,还承担着掩护功能、推移功能、抬底功能等其它的功能。
前后连杆也具有挡矸、管环、阀架等功能。
因此,四连杆设计首先是运动机构设计,还包括各部件的其它功能设计。
液压支架四连杆机构有正负之分,正四连杆机构被广泛采用,反四连杆多用于放顶煤过渡支架。
在反四连杆机构中由于处于掩护梁位置的部件已不再承担掩护功能,通常被改称为斜梁。
1.2 液压支架四连杆机构的功能液压支架四连杆机构有三个功能:一是纵向与横向的稳定功能,即承接外部施加到支架上的横向、纵向的水平力,使支架顶梁不会出现大幅度的水平扭转和横向纵向翻转,使支架立柱免受水平力。
要实现这一功能,设计中应确保组成四连杆机构的各个零部件具有足够的强度,要进行机构受力分析和零部件强度校核计算。
二是将顶梁所受到来自顶板的外载通过四连杆机构传递到底座上。
这一功能我认为是四连杆机构负面效应。
三是让支架顶梁在升降过程中,顶掩铰接点的运动轨迹近似为一条垂线。
实质是让支架在升降过程中,顶梁或前梁的前端至采煤工作面煤壁的距离基本保持不变,使得因空顶距变化量带来的支架顶梁前端的支护效果变化量最小。
液压支架四连杆机构中顶掩铰接点的运动轨迹一般呈“双扭线”状,水平运动范围被称为“摆幅”。
MT/T556-1996《液压支架设计规范》有具体的规定:“具有四连杆机构的支架梁端水平位移量在支架使用高度范围内应不大于80mm。
掩护式及支撑掩护式液压支架特性及工作状况分析当前,综合机械化采煤技术在我国迅速推广,许多地方和矿属的机械厂都纷纷制造采煤机和液压支架,许多中小型矿井甚至地方煤矿都采用了综合机械化采煤技术。
液压支架是综合机械化采煤的主要设备之一,为帮助煤矿工程技术人员、管理人员和技术工人了解和更好地使用液压支架,本文对掩护式及支撑掩护式液压支架工作原理、特性曲线及支撑能力进行分析。
1、掩护式及支撑掩护式液压支架类型2、掩护式及支撑掩护式液压支架工作原理掩护式及支撑掩护式液压支架有单铰式与双铰式两种主要类型。
单铰掩护式支架随采高的变化,顶梁尖端(铰点)围绕支架的后铰点作圆弧运动,因此支架的空顶距随采高的变化而变化,使支架前端无支护空间增大,不利于顶板控制。
(见图2-1a)采用带四连杆的掩护式及支撑掩护式支架(双铰式),随采高的变化顶梁尖端的运动曲线为双纽线,根据双纽线的特点,在设计中可以使顶梁尖端在采高范围内呈近似垂直层面的直线运动,以保证在支架有效采高范围内,使顶梁尖端距煤壁的距离不变。
此外,带四连杆的掩护式及支撑掩护式支架(双铰式)具有承受水平力的能力。
(见图2-1b)液压支架的液压系统由立柱、推移千斤顶、操纵阀、控制阀(安全阀、液控单向阀)、软管等组成。
(见图2-2)通过操纵阀和控制阀,液压支架可完成以下动作(立即支护式):a.降柱、拉架:采煤机通过该支架、顶板暴露后,立即降柱、拉架;b.升柱:支架被拉到新位置后,升柱,使支架撑紧顶板;c.推溜:支架撑紧顶板后,利用推移千斤顶推溜。
初撑力与工作阻力(屈服载荷):升柱后,高压液体进入液压支架各立柱的活塞腔,立柱逐渐升起直至顶梁与顶板紧密接触为止;与此同时,在立柱活塞腔内的高压液体的压力迅速增大到液压泵的工作压力。
当高压液体充满活塞腔时,液控单向阀关闭,将高压液体锁在活塞腔内。
此时,工作在泵的工作压力下的高压液体压力称初撑压力,支架(所有立柱)对顶板的支撑力称初撑力。
液压支架基本理论分析毕业论文目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1国外液压支架的研究现状及发展 (1)1.2本课题的研究目的和意义 (3)第二章液压支架基本理论分析 (5)2.1 液压支架的工作原理 (5)2.2 液压支架的类型和结构 (7)2.3 对液压支架的基本要求 (9)2.4支架的选型设计 (10)第三章液压支架的整体结构设计 (13)3.1 支架高度、中心距的确定 (13)3.2底座长度的确定 (14)3.3四连杆机构的设计 (15)3.4顶梁长度计算 (20)第四章支架主要部件的设计 (22)4.1支架主要部件的设计要求 (22)4.2顶梁的设计 (23)4.3底座的设计 (24)4.4支架技术参数和立柱的设计 (24)4.5立柱柱窝位置和受力计算 (31)4.6 千斤顶技术参数的确定 (33)第五章支架受力分析与计算 (38)5.1支架工作状态 (38)5.2受力计算 (39)5.3 顶梁载荷分布 (43)第六章液压支架的强度校核 (45)6.1 强度条件 (45)6.2主顶梁的校核 (45)6.3 掩护梁强度校核 (48)6.4 底座强度校核 (50)6.5立柱强度校核 (53)第七章液压系统设计 (61)7.1液压支架的液压系统特点 (61)7.2 液压系统的设计方法 (61)7.3 千斤顶系统 (62)7.4乳化液泵站系统 (66)第八章技术经济分析 (71)第九章结论 (72)参考文献 (73)致谢 (74)附录一(英文) (75)附录二(译文) (85)第一章绪论1.1国外液压支架的研究现状及发展地下开采的煤产量主要是利用由液压支架配套的综采设备产出的。
综采设备的研制和广泛的运用,对煤炭工业革新技木装备不仅有着重大的作用,而且对采煤工艺各个环节技术水平的发展和提高,是强有力的促进因素。
加速现代化进程,必须加速煤炭工业企业的建设、改造和革新技术装备的进程,增加地下开采和露天开采的煤产量。
放顶煤液压支架摘要本课题主要论述了液压支架的主要设计过程。
其中包括:液压支架的选型、总体设计、主要零部件的设计以及液压系统设计。
支架的形式为掩护式支架。
支架除了要有效的对顶板进行支撑外,还要实现升、降、推、移几个步骤。
支架采用四连杆机构,改善支架的受力状况,缩小支架的升降过程中顶梁前端前后移动的距离。
立柱采用单伸缩液压缸,前端带有加长杆,以满足支架最低及最高位置时的高度要求。
顶梁掩护梁、底座都做成箱体结构用钢板焊接而成。
在研制液压支架时,需要对支架进行生产试验和分析研究,确定合理的液压支架受力参数、运动参数和结构参数,以及选定液压支架最佳方案等方面综合性的科学技术问题。
关键词:液压支架顶梁底座立柱结构设计ABSTRACTThe article mainly elaborate the hydraulic support design for top-caving. including: the selection of hydraulic pressure support form, system design, main spar part design and examination of hydraulic system design.The support eliminates must realize effectively carries on the strut to the roof, but also must realize ,to fall, to push, move four steps .the support uses four link motion gears, improves the support the stress condition, reduces the support to rise and full the distance which in the process fort end the top-beam around moves. The column uses the list expansion and contraction hydraulic cylinder, front end has legthen the pole, satisfies the support to be lowest and time the highest position high request. The top-beam, shields Liang, the foundation all makes the packed in a box body structure, becomes with the steel plate welding.At research to presses the support, need to carry on produce to experiment and analyze the research, make sure reasonable of liquid presses the support to be subjected to the dint parameter, the sport parameter and the structure parameters, and make selection the liquid to press the synthetic science technique problem of aspect of etc. of the best project of support. Keyword:Hydraulic pressure support Top beam Cradle the column-type support structure design目录摘要 (I)ABSTRACT (II)前言 (1)1液压支架的概述 (2)1.1液压支架的发展概况 (2)1.1.1液压支架使用现状 (2)1.1.2液压支架的发展趋势 (2)1.1.3我国液压支架的状况 (4)1.2本课题的研究目的和意义 (5)2液压支架基本理论分析 (6)2.1 液压支架的工作原理 (6)2.1.1支架推移 (7)2.1.2 支架升降 (7)2.1.3 支架承载过程 (7)2.2 液压支架的类型和结构 (9)2.2.1 掩护式支架 (9)2.2.2 支撑式支架 (10)2.2.3 支撑掩护式支架 (10)2.2.4 特种液压支架 (11)2.3 对液压支架的基本要求 (11)2.4支架的选型设计 (12)2.4.1设计的原始条件 (12)2.4.2支架的支护性能与外载荷 (12)2.4.3 影响架型选择的因素 (13)2.4.4 支架架型的确定 (14)3液压支架的整体结构设计 (16)3.1 支架高度、中心距的确定 (16)3.1.1支架高度 (16)3.1.2支架伸缩比 (16)3.1.3支架间距 (16)3.2底座长度的确定 (17)3.2.1底座长度 (17)3.2.2 底座宽度 (17)4支架主要部件的设计 (17)4.1支架主要部件的设计要求 (17)4.2 四连杆结构 (18)4.2.1 四连杆机构的作用 (18)4.2.2 四连杆机构设计的要求 (19)4.2.3 四连杆机构的设计 (20)4.3底座的设计 (30)4.3.1液压支架的底座 (30)4.3.2 底座接触比压 (31)4.4千斤顶技术参数的确定 (31)4.4.1推移千斤顶 (31)4.4.2立柱 (32)4.4.3辅助装置 (35)4.5.1工作方式对支架顶梁长度的影响 (37)4.5.2配套尺寸对顶梁的影响 (38)4.5.3顶梁其它有关尺寸的确定 (38)4.6液压支架支护技术参数 (39)4.6.1支护面积的确定 (39)4.7支架工作状态 (39)4.7.1 顶板状态 (39)4.7.2支架工作状态 (40)4.7.3支架受力 (40)4.8受力计算 (40)5液压系统设计 (44)5.1液压支架的液压系统特点 (44)5.2 液压系统的设计方法 (45)5.3 千斤顶系统 (45)5.4乳化液泵站系统 (47)5.4.1乳化液泵站 (47)5.4.2泵站液压系统 (48)5.4.3乳化液泵站的元部件 (51)6技术经济分析 (53)7结论 (54)致谢 (55)参考文献 (56)前言时光如梭,大学学习生活马上就要结束,毕业设计是对我们大学生活的一个总结,它要求我们应用所掌握的基本理论和专业知识去解决现实中的一些问题。
基于液压支架四连杆机构参数特点分析与研究
摘要:本文主要针对液压支架四连杆机构的功能及影响四连杆性能的设计因素进行探索。
其中重点介绍了液压支架四连杆机构的构成及特点,并从影响四连杆参数设计的九个方面进行了详细论述。
关键词:液压支架;四连杆机构;梁端距;掩护梁背角;双扭线
中图分类号:TD355 文献标识码:A
1 液压支架四连杆机构的构成与功能
1.1 液压支架四连杆机构的构成
液压支架四连杆机构的构成从表面上看只有前连杆和后连杆,实际上掩护梁和底座是组成四连杆机构的另外一个连杆,掩护梁和底座除了构成四连杆机构以外,还承担着掩护功能、推移功能、抬底功能等其它的功能。
前后连杆也具有挡矸、管环、阀架等功能。
因此,四连杆设计首先是运动机构设计,还包括各部件的其它功能设计。
液压支架四连杆机构有正负之分,正四连杆机构被广泛采用,反四连杆多用于放顶煤过渡支架。
在反四连杆机构中由于处于掩护梁位置的部件已不再承担掩护功能,通常被改称为斜梁。
1.2 液压支架四连杆机构的功能
液压支架四连杆机构有三个功能:一是纵向与横向的稳定功能,即承接外部施加到支架上的横向、纵向的水平力,使支架顶梁不会出现大幅度的水平扭转和横向纵向翻转,使支架立柱免受水平力。
要实现这一功能,设计中应确保组成四连杆机构的各个零部件具有足够的强度,要进行机构受力分析和零部件强度校核计算。
二是将顶梁所受到来自顶板的外载通过四连杆机构传递到底座上。
这一功能我认为是四连杆机构负面效应。
三是让支架顶梁在升降过程中,顶掩铰接点的运动轨迹近似为一条垂线。
实质是让支架在升降过程中,顶梁或前梁的前端至采煤工作面煤壁的距离基本保持不变,使得因空顶距变化量带来的支架顶梁前端的支护效果变化
量最小。
液压支架四连杆机构中顶掩铰接点的运动轨迹一般呈“双扭线”状,水平运动范围被称为“摆幅”。
MT/T556-1996《液压支架设计规范》有具体的规定:“具有四连杆机构的
支架梁端水平位移量在支架使用高度范围内应不大于80mm。
在总图样和技术文件应注明使用高度范围内梁端距范围”。
实际支架产品中摆幅与支架架型、高度差值、正反四连杆机构均有影响,此数值并非不可突破。
液压支架四连杆的实际运动轨迹与理论运动轨迹存在
较大的差异。
其原因是四连杆机构各铰接点、顶掩铰接点的铰接耳与铰接销轴设有径向间隙,钢板焊接结构件受力后会
产生弹性变形。
尤其是立柱掩护式支架立柱轴心线与顶梁、底座设计有明显的倾斜角度,在立柱推力的作用下,销与孔的铰接必然是弧面接触,而不是圆心重合。
至于轨迹扭动方向对顶板运动会产生利弊的观点,我不赞成。
因为现代支架提倡高初撑力,初撑过程中是顶梁上升,四连杆机构的的轨迹扭动方向刚好相反,此时效果正相反。
我认为综采工作面顶板与液压支架顶梁顶面之间的摩擦力主要是由矿山压力
导致的顶板运动造成的。
理论上梁端距应为零,即支架的顶梁或前梁其前端与工作面煤壁平齐。
但是,采煤机在采煤过程中,因煤质硬度不均匀等因素,采煤机滚筒会出现后仰的现象,这时采煤机滚筒的后端面就会截割到支架的顶梁或前梁,造成采煤机和支架设备的损坏。
尤其是在仰采工作面,在重力的作用下,采煤机滚筒必然产生后仰。
为防止出现支架被割,空顶距是必须设置的。
很显然,当采煤机滚筒后仰角度一定的条件下,滚筒后仰产生的横向距离与采煤高度成正比,即支架工作高度越大,所需防止割顶梁的空顶距也越大。
通过以上分析得知,设置梁端距是必须的。
至于梁端距数值的大小在MT/T556-1996《液压支架设计规范》中有具体的规定:“大采高支架应取350mm~480mm。
中厚煤层支架应取280mm~400mm。
薄煤层支架应取200mm~350mm。
”实际支架产品中梁端距更多是由采煤工作面顶板稳定条件
和经验确定的。
顶板越破碎梁端距应越小,反之顶板越完整梁端距可适当加大,实践经验数据更可靠。
2 液压支架四连杆机构的特点与影响设计因素
2.1 液压支架四连杆机构的特点
由于液压支架产品的需要形成了液压支架四连杆机构的特点是:连杆之一的底座位于机构的下方;连杆之一的掩护梁或斜梁位于机构的上方;对于正四连杆机构的前连杆位于前方(左边),后连杆位于后方(右边);前连杆与后连杆相比长度更长些;与掩护梁铰接的前、后连杆上铰接点间距小于与底座铰接的前、后连杆下铰接点间距;允许后连杆杆身中轴线不与两端铰接点连线重合,使得后连杆呈现偏心或弯曲;掩护梁上的三个铰接点允许不在一条直线之上(三个铰接点设计在一条直线上被广泛采用,前连杆铰接点位于另两个铰接点连线之下使得前连杆铰接点所在截面抗弯能力更强,前连杆铰接点位于另两个铰接点连线之上在反四连杆机构中采用较多);掩护梁上的任意两个铰接点连线所在平面允许不与掩护梁顶板顶面平行(可使前连杆铰接点处截面面积增大)。
2.2 配套设备对四连杆机构在支架总体布局位置的影响
采煤机、刮板输送机是液压支架在采煤工作面的配套设备,并形成支架前方至煤壁的距离的设计依据。
(1)梁端距指标对四连杆机构的影响
前面已分析过,梁端距对四连杆机构的影响有两条:一是梁端距的数值区段,二是摆幅值。
有时可能还有运动趋势的要求。
(2)掩护梁背角的限制
一般来说,掩护梁背角掩护的作用是十分重要的,主要体现在减少掩护梁的水平投影距离和防止冒落到掩护梁顶面上的矸石不能自行下滑,影响支架升起。
掩护梁背角的限制范围具体是:掩护式支架一般在57°以上;支撑掩护式支架一般在60°以上;掩护梁背角应大于16.7°。
(3)后连杆水平夹角的限制
后连杆与水平面的夹角随着支架高度的增加而增大。
若此夹角接近90°,一旦后连杆、掩护梁手动指向煤壁方向的外力,后连杆继续旋转将导致此角大于90°,后连杆将无法自行复位。
为防止这一现象发生,此角应不大于80°。