国内外主流多轴运动控制器性能比较
- 格式:doc
- 大小:41.50 KB
- 文档页数:2
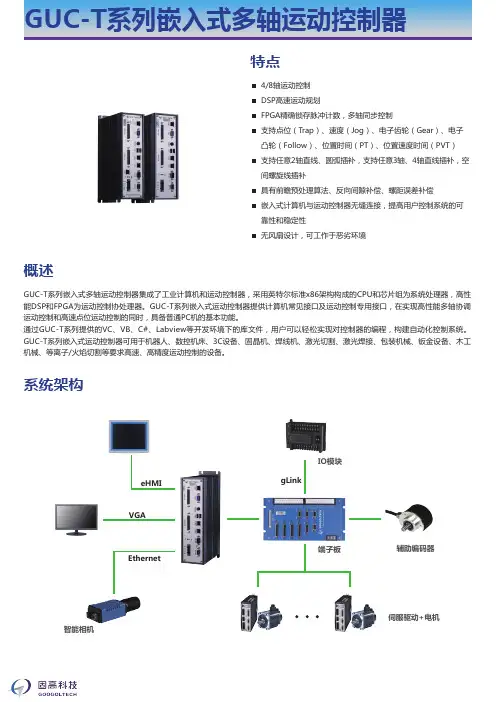
GUC-T系列嵌入式多轴运动控制器集成了工业计算机和运动控制器,采用英特尔标准x86架构构成的CPU和芯片组为系统处理器,高性能DSP和FPGA为运动控制协处理器。
GUC-T系列嵌入式运动控制器提供计算机常见接口及运动控制专用接口,在实现高性能多轴协调运动控制和高速点位运动控制的同时,具备普通PC机的基本功能。
通过GUC-T系列提供的VC、VB、C#、Labview等开发环境下的库文件,用户可以轻松实现对控制器的编程,构建自动化控制系统。
GUC-T系列嵌入式运动控制器可用于机器人、数控机床、3C设备、固晶机、焊线机、激光切割、激光焊接、包装机械、钣金设备、木工机械、等离子/火焰切割等要求高速、高精度运动控制的设备。
特点4/8轴运动控制DSP高速运动规划FPGA精确锁存脉冲计数,多轴同步控制支持点位(Trap)、速度(Jog)、电子齿轮(Gear)、电子凸轮(Follow)、位置时间(PT)、位置速度时间(PVT)支持任意2轴直线、圆弧插补,支持任意3轴、4轴直线插补,空间螺旋线插补具有前瞻预处理算法、反向间隙补偿、螺距误差补偿嵌入式计算机与运动控制器无缝连接,提高用户控制系统的可靠性和稳定性无风扇设计,可工作于恶劣环境概述系统架构伺服驱动+电机IO模块辅助编码器智能相机gLinkeHMIVGAEthernet端子板订货信息尺寸图控制器扩展IO模块* 各个型号的控制器安装尺寸相同各个型号的扩展IO安装尺寸相同4轴端子板8轴端子板固高科技(深圳)有限公司Tel.: +(86) 755-26970817E-mail: googol@ Web: 固高科技(台湾)有限公司Tel.: +886-4-2358-8245E-mail: googoltw@声明对于上述产品型号及描述,固高公司保留未经事先声明加以修改的权利。
固高科技(香港)有限公司Tel.: +(852) 2358-1033E-mail: sales@ Web: 。
PMAC 可编程多轴控制器简介PMAC 是可编程多轴控制器(Programmable Multi-Axis Controller)的简称,是美国Delta Tau 公司生产的功能强大的运动控制器,PMAC 是目前世界上功能最强的运动控制器之一,是当前开放式数控系统控制器的突出代表。
图3.3为PMAC 的硬件原理和接口图[22]。
PMAC 是一台具有独立内存、独立运算操作能力的计算机[23],它采用Motorola 的DSP56001作为CPU ,它可以通过存储在自己内部的程序进行单独的操作;它还是一台实时的、多任务的计算机,能自动对任务进行优先等级判别,先执行优先级高的任务。
PMAC 既可以独立工作亦可按主机的命令进行工作,它和主机的通讯可以通过串行口也可以通过总线进行,通过总线通讯时,还可以将中断信号引入主机,从而实现非常灵活有效的控制系统。
PMAC 最多可以控制8个轴同时运动,在对伺服数据的处理能力、轴特性及输入信号带宽方面,PMAC 控制器由于采用专门的模块化结构,编码输入的串行处理速度是大多数控制器的10到15倍,SUBAT(Servo Update/Block/Algorithm Term 伺服更新率/块执行速率/伺服算法的项数)是非DSP 控制器的几十倍;它还可从高分辨率编码器件接收低插补位的5位并行数据;可得到320MHz 的有效输入带宽;其DAC 输出分辨率高达16/18位;PMAC 在实际的运动之前,先进行预运算,将不同的运动轨迹按某种模式(如:PMAC 具有内置PLC ,可以在后台同时运行32个异步PLC 程序,同时PMAC 提供了非专用的数字输入/输出口,利用这些I/O 口可以完成机床的逻辑控制,控制面板的操作、位置反馈、手轮及主轴的操作等。
变频器在印染设备多电机同步调速中的应用发表于 2007-7-1 18:56:58 变频器在印染设备多电机同步调速中的应用摘要: 本文概述了变频器在印染设备多电机同步调速中的应用,从通用变频器到伺服变频器,包括有松紧架和无松紧架以及卷绕驱动。
1.工业机器人技术及关键基础部件(1)机器人关键基础部件定义、分类及市场占有率;机器人关键基础部件是指构成机器人传动系统,控制系统和人机交互系统,对机器人性能起到关键影响作用,并具有通用性和模块化的部件单元。
机器人关键基础部件主要分成以下三部分:高精度机器人减速机,高性能交直流伺服电机和驱动器,高性能机器人控制器等。
目前在高精度机器人减速机方面,市场份额的75%均两家日本减速机公司垄断,分别为提供RV摆线针轮减速机的日本Nabtesco和提供高性能谐波减速机的日本Harmonic Drive.包括 ABB, FANUC, KUKA,MOTOMAN在内国际主流机器人厂商的减速机均由以上两家公司提供,与国内机器人公司选择的通用机型有所不同的是,国际主流机器人厂商均与上述两家公司签订了战略合作关系,提供的产品大部分为在通用机型基础上根据各厂商的特殊要求进行改进后的专用型号。
国内在高精度摆线针轮减速机方面研究起步较晚,仅在部分院校,研究所有过相关研究。
目前尚无成熟产品应用于工业机器人。
近年来国内部分厂商和院校开始致力高精度摆线针轮减速机的国产化和产业化研究,如浙江恒丰泰,重庆大学机械传动国家重点实验室,天津减速机厂,秦川机床厂,大连铁道学院等。
在谐波减速机方面,国内已有可替代产品,如北京中技克美,北京谐波传动所,但是相应产品在输入转速,扭转高度,传动精度和效率方面与日本产品还存在不小的差距,在工业机器人上的成熟应用还刚刚起步。
在伺服电机和驱动方面,目前欧系机器人的驱动部分主要由伦茨,Lust,博世力士乐等公司提供,这些欧系电机及驱动部件过载能力,动态响应好,驱动器开放性强,且具有总线接口,但是价格昂贵。
而日系品牌工业机器人关键部件主要由安川,松下,三菱等公司提供,其价格相对降低,但是动态响应能力较差,开放性较差,且大部分只具备模拟量和脉冲控制方式。
国内近年来也开展了大功率交流永磁同步电机及驱动部分基础研究和产业化,如哈尔滨工业大学,北京和利时,广州数控等单位,并且具备了一点的生产能力,但是其动态性能,开放性和可靠性还需要更多的实际机器人项目应用进行验证。
108 2世界各大PLC厂商高端产品比较自1968年美国莫迪康( Modicon )公司发明PLC (Programmable Logic Controller) 产品以来, 先后涌现了近千个品牌, 历经30多年的发展和淘汰, 目前就高端产品而言, 在整个PLC 业界有以下几家代表了最高的技术水平:1. 美国Rockwell 公司– PLC5相对与Control Logix, PLC5 在机械和电气性能上远优于前者.在网络与通讯方面, Control Logix 支持的网络PLC5 均支持; 而PLC5 的网络, Control Logix 不能完全支持,由于Control Logix 是于1998年底推出的, 由于产品发展的自然规律, 其智能化和特殊应用模板的种类要比PLC5 少. 举例来说, PLC5 有一种Basic 模板可通过Basic 编程以对一些第三方通讯接口通讯, 而Control Logix 至今尚未推出.Control logix是AB公司为降低成本,所推出的’所谓的大型PLC’,其实为中小型PLC系统,该系统由于刚刚推出,产品的性能和指标很不成熟,特别强调的是:没有真正意义的双CPU系统.Control logix是总线式的多任务处理器结构,同一槽架上能插多块CPU,但由于是多任务处理器的机理,故虽然是多块CPU,但每一块CPU的工作内容并不一样,也就是说,一块CPU坏了,另一块CPU并不能替代,导致输入信号可以共享,但输出信号却不能同时控制.鉴于此,AB公司的几个人在一起,开发出”一段热备切换程序”,以完成双CPU的切换,但他们根本不能提供真正的切换时间(而其他公司可提供),这就是PLC业界所称的”软件切换”,很不可靠.由于AB 公司有很多的第三方厂商为其开发第三方通讯接口, 其系统的开放性很好但由于这些产品开发商均是基于PLC5 或SLC500 系列的硬件平台上来进行开发造成目前Control Logix 在系统开放性方面比PLC5 差了很多就近3 年国内外的应用实绩, PLC5 远胜于Control Logix2. 美日合资GE Fanuc 公司GE Fanuc 公司的最高端产品应是GE Fanuc 9070 系列相对与更类似与日本产品的GE Fanuc 9030 系列, 9070 在机械和电气性能上远优于前者在一些真正考核大型机标准的特性上, 如双机热备上9070的性能要远优于90303. 德国Siemens 公司从发展角度来说, S7-400 系列应该已取代S5 系列. 从模板种类, 网络种类, 专用模板数量来说, S7-400 均接近S5 系列. 然而从模板的可靠性角度分析, S5 的质量要远胜于S7-400. 这一点可以在Siemens 本公司工程部在国外重大工程仍主推S5 系列上可以看出.如99年7月,杭州四堡40万吨污水厂业主要求用S7-400,而德国的系统集成商认为S5比S7可靠,结果系统还是选用S5系列.Siemens公司在国外的投标项目中,都选用S5.4. 法国施耐德公司该公司承认Modicon TSX Quantum 系列为其最高端产品,可达到目前业界的最高水平.二. 产品比较1. 模块带电插拔能力Rockwell AB PLC5, 所有模板不能带电插拔Rockwell AB Control Logix, IO模板可带电插拔其他模板不能带电插拔GE Fanuc 9070, 所有槽装模板不能带电插拔GE Fanuc 9030, 所有模板不能带电插拔Siemens S5, 所有模板不能带电插拔Siemens S7-400, IO模板可带电插拔其他模板不能带电插拔Schneider Modicon TSX Quantum, 所有模板均能带电插拔2. 支持IEC870-5 通讯规约的能力Rockwell AB PLC5, 通过Basic 模板或第三方模板Rockwell AB Control Logix, 没有Basic 模板并且尚未有第三方模板的支持. 故应不能支持该规约GE Fanuc 9070,可以GE Fanuc 9030, 不详Siemens S5 系列, 可以Siemens S7 系列,可以Schneider Modicon TSX Quantum 系列, 可以3. 双机热备的实现Rockwell PLC5 系列两套主机系统互为备用. 以实现数据同步交换互为备用的功能.?主/从机之间采用电缆连接, 其优点是:1. 采用类Modicon 984 热备模式,可靠性高2. 所有主从机架上模板均能互备3. 在实时性要求不高的场合有一定的成功应用业绩其缺点是:1. 热备切换需要用户编程–使用和维护较复杂2. 主从机通过电缆交换数据, 实时性较差,最快切换周期49 msRockwell Control logix系列99年推出. 与PLC5 的结构基本相同.其优点是:1. 采用类Modicon 984 热备模式,可靠性高2. 所有主从机架上模板均能互备其缺点是:1. 热备切换需要用户编程–使用和维护较复杂2. 尚未有成功的业绩, 其可靠性不能保证3. 采用单电源技术, 不是最可靠GE Fanuc 9070 系列GE 90-70的热备系统必须使用冗余CPU模块(IC697CPU780),热备模块(IC697RCM711),以及总线传输模块(IC697BEM713).每次扫描,传送一次数据.CPU切换时间多数情况之下是在一个周期内,大约20ms.切换可通过自动,手动,及软件实现.IC697CPU780用的是80386DX芯片,主频为16MHz.CPU780不支持I/O中断,时间中断,VME集成槽架,闪存操作,STOP/IOSCAN模式.90-70的本地I/O及Genius I/O(远程I/O)都可用于热备系统.(1) Genius I/O热备系统可以有一条或多条Genius I/O bus,任何GE的设备都可以连在上面,包括Genius blocks, Remote I/O Scanner.主PLC地址为31,备用PLC地址为30.(2) 本地I/O本地I/O并非热备系统的一部分.可以选择这些数据是否传输.(3) Cable Connections可以在热备缆上连接6个机架,使用一种总线接收模块.距离很近.其优点是:采用Modicon 984 热备模式, 可靠性较高其缺点是:1. 冗余的两块CPU,必须分别作配置, 使用不方便2. 冗余用CPU 为专用CPU, 单机应用时无法使用,灵活性很差3. RCM模块与CPU之间不能有空槽, 组态麻烦4. 主从机之间切换较慢, 典型的时间应在60 ~ 80 ms左右GE Fanuc 9030 系列GE 90-30有两种热备方式.1. 单机架CPU热备由于所有的90-30机架都只有一个CPU插槽,所以90-30只支持单CPU,要在单机架上实现双CPU 冗余,就必须在一个非CPU插槽上插一块叫做PCM的模块,以起到CPU的作用.此种热备方式的优点:除了价格上的优势, 其余一无是处缺点:1) 90-30机架只支持单电源,所以一旦电源故障,双CPU也就形同虚设.2) 这种热备方式的实现必须用C语言及Basic编程,十分不便3) 很少应用实例.2. 双机架热备.这种热备方式类似于Quantum.不过它的热备模块用的是Genius I/O通讯模块.它的所有I/O均挂在Genius I/O上,主机架上没有I/O.也就是说,Genius I/O同时起到I/O通讯和热备数据交换的作用.优点:价格便宜.缺点:1)Genius I/O数据交换速度比不上光缆.2)推出不久,不够成熟.? Siemens S5 系列两套主机系统互为备用. 主/从机之间采用电缆连接, 以实现数据同步交换互为备用的功能.其优点是:1. 采用类Modicon 984 热备模式,可靠性高2. 所有主从机架上模板均能互备3. 在实时性要求不高的场合有一定的成功应用业绩其缺点是:1. 热备切换需要用户编程–使用和维护极复杂2. 主从机通过电缆交换数据, 实时性较差Siemens S7-400系列真正的S7-400的热备系统包括2块电源,2块CPU(S7 417-4H),4块热备同步子模块(这是一种体积较小, 类似于PCMCIA卡的装置,插在S7 417-4H的槽里,之间用光缆连接.其优点是:1. 采用光缆传输同步数据传送速度很高2. 所有主从机架上模板均能互备其缺点是:1. 热备切换需要用户编程–使用和维护极复杂2. 几乎在国外大型项目中无应用实绩Schneider Modicon TSX Quantum作为热备系统的发明者, Modicon 一直处于热备系统的技术领先地位.其584, 984 热备系统的构想影响了整个PLC 业界的热备技术发展. 目前Quantum 系列的热备系统从技术角度来讲, 无疑是最佳其优点是:1.热备切换无需用户编程–使用和维护极方便2.热备系统单机编程–和单机系统并无差别3. 采用光缆同步传送数据, 实时性极高4. 主从切换时间在13~48 ms 内5. 主从机完全无扰切换1.Rockwell AB Control Logix, 所有模板可带电插拔;2.GE Fanuc 9070, 所有IO槽装模板均能带电插拔;3.GE Fanuc 9030, 所有IO模板插在PAC RX3机架后均能带电插拔;4.Siemens S7-400, 所有模板可带电插拔;。

PMAC多轴运动控制器研究随着工业自动化的快速发展,多轴运动控制器在各种工业应用中的重要性日益凸显。
在这种背景下,PMAC(Programmable Multi-Axis Controller)多轴运动控制器作为一种先进的控制解决方案,引起了广泛。
本文将详细介绍PMAC多轴运动控制器的原理、设计及其实验结果,并探讨其未来研究方向和应用前景。
多轴运动控制器是指能够同时控制多个轴运动的控制器。
在工业自动化领域,多轴运动控制器广泛应用于机器人、数控机床、印刷机等设备。
PMAC多轴运动控制器作为一种可编程控制器,具有高度的灵活性和通用性。
它允许多个轴的运动控制相互独立,同时又协调一致,以实现复杂的运动轨迹和精确的位置控制。
PMAC多轴运动控制器采用基于PC的开放式体系结构,通过高速光纤总线实现与PC的高速数据传输。
控制器硬件由多个轴控制器模块和I/O模块组成,每个轴控制器模块可独立控制一个轴,I/O模块则用于输入输出信号的处理。
PMAC多轴运动控制器的核心是运动控制算法。
算法采用基于矢量控制的方法,通过实时计算速度和位置误差,实现对电机的精确控制。
PMAC还支持多种编程语言,如C++、和Python,方便用户根据具体应用进行软件开发。
为了验证PMAC多轴运动控制器的性能,我们进行了一系列实验。
在实验中,我们将PMAC控制器应用于一台五轴数控机床,通过控制五个电机的运动,实现了对工件的精确切割。
实验结果表明,PMAC控制器在位置控制和速度控制方面都具有很高的精度和稳定性。
我们还对比了PMAC控制器和其他多轴运动控制器的性能。
对比结果表明,PMAC控制器在动态性能、稳态精度和抗干扰能力等方面都具有显著优势。
这主要得益于PMAC控制器的开放式体系结构、高速数据传输和先进的运动控制算法。
本文对PMAC多轴运动控制器进行了详细研究。
通过介绍PMAC控制器的原理、设计和实验结果,我们证明了PMAC作为一种先进的可编程多轴运动控制器,在工业自动化领域具有广泛的应用前景。

就我拥有的四轴飞控做⼀个⽐较(KK、MWC、⽟兔、FF)我之前从未飞过直机,先后飞过的四轴飞控有KK、⽼乔牌MWC、⽟兔、FF,现在就这四款飞控作⼀下个⼈的使⽤测评。
KK是我⼊门四轴的第⼀块飞控,可以这么说,⾃从MR将KK的暴利打成了原形,才有了今天多旋翼的如此流⾏。
我先后⼀共拥有过六块KK,第⼀块KK是168元买的散件,后来承蒙某商家搞活动,送了我5⽚KK的PCB空板,我⾃购元件,焊出了五板:em00: 。
KK的使⽤确实⽐较简单,调试也⾮常简便,这才让我对四轴彻底的⼊了迷,但KK由于没有⾃稳功能,导致了多次在飞远后或有风天因为看不清姿态⽽炸机收场。
初飞KK时,我创下了⼀块电池的飞⾏内炸了⼋⽀桨的纪录,⼀个星期炸了100元的时候的1045正反桨还很贵,⼀⽀5块5,炸起来真是⾁痛:em17: 。
后来⼊了LAMA桨,炸桨再也不⼼痛了。
还引领了⼀次LAMA桨的风潮,导致淘宝上的某商家⼀天销售LAMA桨数千⽀的热潮:em15:的总结是:便宜、调试简单、升级固件⽅便、⽀持单轴到N轴的飞⾏模式,但功能⽐较少,是带领⼴⼤模友⼊门四轴的功⾂。
并且始终感觉KK是练技术的第⼀选择。
对KK的总结后来⼊⼿了⽼乔的MWC飞控,第⼀次体会到了⾃稳的乐趣,只要⼀松杆,飞机马上就能恢复到⽔平状态,感觉真是太爽了,也体会到了罗盘的作⽤,只要罗盘⼀开,⽅向就能锁得死死的,但⽓压定⾼,感觉从来没有⽣效过,感觉应该是定⾼的算不过MWC的调试确实很难,有时候不怎么调,都能好飞得不得了,有时候却会很难飞,所幸的是,⽼乔的售后做的⾮常好,经常半夜帮我远程调机,并且⽼乔也有详细的教程。
但估计由于MWC的作者是国外的,有时很难正确理解到MWC原作者件的PID也没有⼀个很好的理解,我们的意见也⽆法得到作者的⽀持。
后来MWC也有了CF功能,由于我的飞控寄回给⽼乔升级了,现在新的机架还没有,⼀直没有真正的体会过。
对MWC总结总结:调试⽐较⿇烦,调试好了,⾮常好飞;英⽂好的模友,可以看看官⽹,可能会有⽐较⼤的收获;⽓压定⾼效果⼀般;⽼乔的服务很好;那份教程是⽬前见过最详细的。
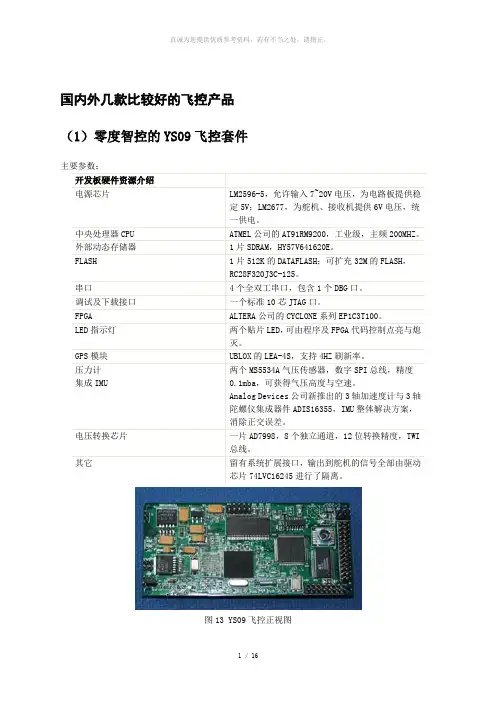
国内外几款比较好的飞控产品(1)零度智控的YS09飞控套件主要参数:开发板硬件资源介绍电源芯片LM2596-5,允许输入7~20V电压,为电路板提供稳定5V;LM2677,为舵机、接收机提供6V电压,统一供电。
中央处理器CPU ATMEL公司的AT91RM9200,工业级,主频200MHZ。
外部动态存储器1片SDRAM,HY57V641620E。
FLASH 1片512K的DATAFLASH;可扩充32M的FLASH,RC28F320J3C-125。
串口4个全双工串口,包含1个DBG口。
调试及下载接口一个标准10芯JTAG口。
FPGA ALTERA公司的CYCLONE系列EP1C3T100。
LED指示灯两个贴片LED,可由程序及FPGA代码控制点亮与熄灭。
GPS模块UBLOX的LEA-4S,支持4HZ刷新率。
压力计集成IMU 两个MS5534A气压传感器,数字SPI总线,精度0.1mba,可获得气压高度与空速。
Analog Devices公司新推出的3轴加速度计与3轴陀螺仪集成器件ADIS16355,IMU整体解决方案,消除正交误差。
电压转换芯片一片AD7998,8个独立通道,12位转换精度,TWI总线。
其它留有系统扩展接口,输出到舵机的信号全部由驱动芯片74LVC16245进行了隔离。
图13 YS09飞控正视图图14 YS09飞控后视图(2)北京普洛特无人飞行器科技有限公司的UP30/40飞控系统UP30性能参数:集成3轴MEMS加速度计、速率陀螺,GPS,空速传感器,及更高精度的全数字气压高度计供电范围扩展为4~26V,很多电动飞机的动力电可以直接给其供电体积相对UP20更小巧,仅为40X100X12mm3,重量26g外部接口和任务功能灵活且可以定制可内置3轴电子罗盘,支持3轴云台控制具备GPS/INS惯性导航功能,满足在丢星情况下返回起飞点舵机扩展到10~24个,分别可以执行飞行控制和其他任务支持国产低速通讯电台(最低波特率至1200bps),使得通讯距离更远、更可靠、误码率更低 2~6个10位AD,1路16位AD,充分满足任务数据采集需求大气数据探测能力,可以观测大气温压湿,以及风向风速具备UP20所具备的定时定距以及定点的航拍功能具备2路转速监测,特别适合于双发动机的无人机、无人飞艇的转速监测新的电气停车功能支持除了原来的磁电机发动机(如小松系列),还支持CDI点火的发动机(如3w等)支持全自动伞降;可连接超声波高度传感器实现全自动的滑跑降落,只需要在地面站上指定降落点与方向以及左右盘旋,飞控自动推算下滑航线。
多轴运动控制器选择
基本要求:
●六路模拟量控制
●带模拟量反馈输入信号
●易于编程
1.中国固高GE系列多轴点位运动控制器
该系列产品基于计算机PCI或ISA总线,可同时控制1-8个伺服/步进电机
详见:
/web/chi/product_details_frame.jsp?module=运动控制产品&gid=869
2.凌华科技()PCI8136 6轴道伺服电机控制卡
电机控制卡,但我看到有模拟量输入输入的,请咨询是否可用
/st1388/product_165534.html
/cn/Motion/index.html
模拟量输出
6个输出通道
输出范围:双极性±10V
16位D/A转换分辨率,保证14位精度
建立时间:2 μ sec
电压输出驱动能力:最大±5mA
模拟量输入
6个差动/单端输入通道
输入范围:
电压:+10V
电流:0~20 mA
12位A/D转换器,1位非线性
输入阻抗约440K Ω(电压)120 Ω(电流)
采样频率:多路133 KHz
基于DSP的3/6轴模拟运动控制卡8156
/PD/cn/PD_detail.php?pid=684
3.美国DMC-18x6 Galil高性能运动控制卡
/china/2/products/3131420/DMC-18x6_Galil%E9%AB%98%E 6%80%A7%E8%83%BD%E8%BF%90%E5%8A%A8%E6%8E%A7%E5%88%B6%E5%8D %A1.html
/product/detail/2728886.html。
目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (7)2.2.2.3 数字I/O接口板 (7)第三章 Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (8)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
深圳销售部地址:深圳市南山区高新技术产业园南区深港产学研基地大楼西座二楼W211室电话:0755-2697 0824 2673 7236传真:0755-2697 0821邮编:518057E-mail: googolhn@上海分公司地址:上海市闵行区莲花路1733号华纳风格酒店503室电话:021-5422 1612 021-5422 1606传真:021-5422 1612邮编:201103E-mail: googolsh@北京分公司地址:北京市海淀区学院南路68号吉安大厦A 座4016室电话:010-6213 6689 6216 2544 6213 6626传真:010-6213 6626邮编:100081E-mail: googolbj@西北办事处地址:陕西省西安市电子二路72A 号21006室电话:029-********、139********传真:029-********邮编:710061E-mail: googolxa@武汉办事处地址:武汉市东湖开发区关山大道218号保利花园D-1105电话:027-8780 6113传真:027-8742 1520邮编:430074E-mail: googolwh@成都办事处地址:成都市文德路58号宝泰家园5-3-27-3电话:028-8325 4020传真:028-8325 4020邮编:610051E-mail: googolcd@济南办事处地址:山东省济南市槐荫区发祥项1号楼1411室电话:0531-8718 0860 186********传真:0531-8718 0860邮编:250016E-mail: zhou.xs@西南地区总代理广西南宁精微环保节能科技有限公司地址:广西南宁市民族大道92-1号新城国际1705室电话:0771-226 4522 2264533 159********传真:0771-226 4522邮编:530022E-mail: sdszph@固高科技(香港)有限公司地址:香港九龙观塘伟业街108号丝宝国际大厦10楼1008-09室电话: + (852)-2358 1033传真: + (852)-2719 8399/E-mail:sales@固高科技(深圳)有限公司地址:深圳市南山区高新技术产业园南区深港产学研基地大楼 西座二楼W211室电话:0755-2697 0817 2697 0824传真:0755-2697 0821邮编:518057http: ///E-mail: googol@CONTENTS目录运动控制技术简介插卡式运动控制器◇ 型号定义说明◇ GE 系列多轴点位运动控制器◇ GE 系列多轴连续轨迹运动控制器◇ GT 系列多轴运动控制器◇ GTS 系列多轴运动控制器◇ GO 系列运动控制器◇ GE 系列四轴激光运动控制器◇ GT 系列激光(振镜)切割标刻运动控制器◇ GH 系列多轴运动控制器◇GN 系列网络式运动控制器一体化运动控制器◇ GUC-E 系列四轴一体化运动控制器(L2)◇ GUC-E 系列四轴一体化运动控制器(L3)◇ GUC 系列四轴一体化连续轨迹运动控制器(L2-LR)◇ GUC 系列四轴一体化点位运动控制器(L2-LR)◇ GUC-T 系列多轴一体化运动控制器◇ GUC-T 系列多轴一体化运动控制器 (高性能型)◇ GUC-H 系列多轴一体化运动控制器◇ GUC 系列四轴激光切割雕刻一体化运动控制器◇GUC-400-TN1-M0X 系列网络式运动控制器嵌入式运动控制器◇GV 系列多轴运动控制器人机界面IO 扩展模块编码器信号驱动及多路分配板电缆◇ 端子板与部分品牌驱动器连接电缆◇其它连接电缆典型应用资质证书122357911131517192121232527293133353739394143454746474849固高科技(香港)有限公司成立于1999年,总部位于香港科技大学。
NST309独立运动控制器用户手册北京诺信泰伺服科技有限公司2010-6-10一、概述NST309独立运动控制器的核心是英国Trio Euro—209 多轴控制器。
由于该控制器是3U结构的板卡,在接线和应用方面非常不方便,为了方便用户能够更好的使用控制器,经过我公司的技术人员整理开发,在NST309中集成了Euro—209的供电电源+5V,其供电电源直接采用直流24V供电,增加了电源部分滤波稳压等;并且由原先96-pin的欧式插头转换成用户方便接线的通用接线的D型15针的插头和普通的接线端子,而且对屏蔽也做了很好的处理,这样有利于用户方便接线和快速查找设备的故障问题。
而且该控制器采用金属外壳封装和螺钉安装,不需要考虑采用绝缘等措施。
以下是NST309的外形安装尺寸以及接线说明。
请在接线时参照该说明书。
二、外形及插头布局及安装尺寸图三、主要性能特点:该控制器可以控制1到8 个轴的伺服或步进,或者是二者的任意结合。
另外,此款控制器还可以添加一块TRIO的功能子板,实现对第9轴的控制或者扩充出一个通信通道。
NST309的设计是一款功能强大但十分经济的控制器,即为OEM设备生产商提供一种性能高且经济型的控制器。
同时,该运动控制器设计上,支持由上位计算机配置和编写的多任务程序,满足客户对多任务工程的需要,任务程序采用Trio Basic语言进行编写。
如果外部电脑并不是终端系统所必须的,控制卡可独立脱机运行,可以通过Ethernet与计算机进行通讯,也可以实现高速通讯编程开发。
NST309的Trio BASIC多任务版本允许7个Trio BASIC程序在控制器内按照优先级别同时运行。
NST309本体具有16个内置的24V开关量输入口和8个内置的输出口。
这些开关量可以作为系统内部的逻辑交换变量,或者可以根据实际需要用于连接控制器的限位信号、原点信号及一些反馈信号。
通过初始化程序我们已经把原先控制卡上的8个输入指示灯定义为输出点的指示灯,同时对输入点设计了专门的指示灯信号。