第五讲 精密角度测量分解
- 格式:ppt
- 大小:356.50 KB
- 文档页数:74

![精密测量技术电子教案0506[1]](https://uimg.taocdn.com/96873808af1ffc4fff47ac27.webp)

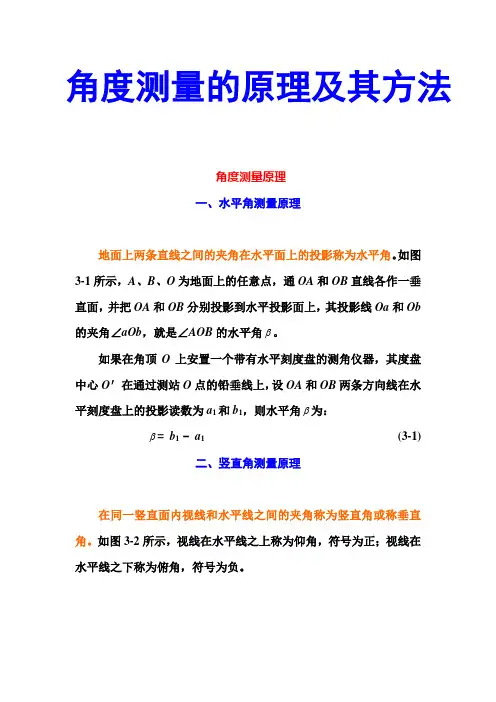
角度测量的原理及其方法角度测量原理一、水平角测量原理地面上两条直线之间的夹角在水平面上的投影称为水平角。
如图3-1所示,A、B、O为地面上的任意点,通OA和OB直线各作一垂直面,并把OA和OB分别投影到水平投影面上,其投影线Oa和Ob的夹角∠aOb,就是∠AOB的水平角β。
如果在角顶O上安置一个带有水平刻度盘的测角仪器,其度盘中心O′在通过测站O点的铅垂线上,设OA和OB两条方向线在水平刻度盘上的投影读数为a1和b1,则水平角β为:β= b1 - a1(3-1)二、竖直角测量原理在同一竖直面内视线和水平线之间的夹角称为竖直角或称垂直角。
如图3-2所示,视线在水平线之上称为仰角,符号为正;视线在水平线之下称为俯角,符号为负。
图3-1 水平角测量原理图图3-2 竖直角测量原理图如果在测站点O上安置一个带有竖直刻度盘的测角仪器,其竖盘中心通过水平视线,设照准目标点A时视线的读数为n,水平视线的读数为m,则竖直角α为:α= n - m (3-2)光学经纬仪一、DJ6级光学经纬仪的构造它主要由照准部(包括望远镜、竖直度盘、水准器、读数设备)、水平度盘、基座三部分组成。
现将各组成部分分别介绍如下:1.望远镜望远镜的构造和水准仪望远镜构造基本相同,是用来照准远方目标。
它和横轴固连在一起放在支架上,并要求望远镜视准轴垂直于横轴,当横轴水平时,望远镜绕横轴旋转的视准面是一个铅垂面。
为了控制望远镜的俯仰程度,在照准部外壳上还设置有一套望远镜制动和微动螺旋。
在照准部外壳上还设置有一套水平制动和微动螺旋,以控制水平方向的转动。
当拧紧望远镜或照准部的制动螺旋后,转动微动螺旋,望远镜或照准部才能作微小的转动。
2.水平度盘水平度盘是用光学玻璃制成圆盘,在盘上按顺时针方向从0°到360°刻有等角度的分划线。
相邻两刻划线的格值有1°或30′两种。
度盘固定在轴套上,轴套套在轴座上。
水平度盘和照准部两者之间的转动关系,由离合器扳手或度盘变换手轮控制。
实验报告一、精密角度测量一、实验名称:精密角度测量二、实验性质:综合性三、实验地点:时间: 2四、实验目的:1.熟悉仪器的操作;2.掌握用方向观测法测水平角的操作步骤及记录、计算方法;3.掌握计算测角中误差的计算方法。
五、仪器和工具:全站仪一台,三脚架一个,记录板一块,自备铅笔,小刀和记录手薄。
六、实验内容及设计:在实验之前,需要做的工作是:了解实验内容,以及读数的多种限差,并选择好实验地点,大略知道实验数据的处理。
1.实验步骤:1)架设全站仪,完成对中、整平;2)调清楚十字丝,选择好起始方向,消除视差;3)一个测站上四个目标一测回的观测程序(1)盘左位置首先照准起始方向B,配置度盘为0度,顺时针旋转照准部,依次照准目标C、D、E、B,分别读记水平方向值。
由B目标的两次读数计算盘左归零差并记入相应的表中。
若归零差超限应立即重测;(2)盘右位置倒转望远镜变成盘右位置,逆时针方向依次照准B、E、D、C、B目标,分别读记水平方向值。
计算盘右归零差。
若超限,应重测整个测回;4)记录员计算各方向观测值,记入相应的表格中。
若超限立即重测;5)重复3、4步作第二测回观测和记录计算;6)计算每个角平均方向值,求算三角形闭合差并计算测角中误差,与限定值比较。
- 1 - AC DE []n ww m 3±=2.实验大略图(图一)七、实验原始记录(附后)八、实验计算、分析与总结1.三角中误差计算公式:式中:w —— 三角形闭合差;n —— 三角形个数(这次实验中的三角形个数为10)2.各个三角形计算角度及其总闭合差(表2):由表2可以看出,测角中误差是1.95″,误差总的来说分为三种原因,第一个是仪器的误差,这是系统误差,总是存在的;第二个就是观测误差,特别是这个误差,每个人架设仪器,有时候会高一点,有时候会低一点,读数都不一样,这就导致最后的误差较大;第三个就是环境影响产生的误差,我们实验的时候,环境对实验产生的误差较小。