美国航天飞机系统全介绍
- 格式:docx
- 大小:3.33 MB
- 文档页数:125
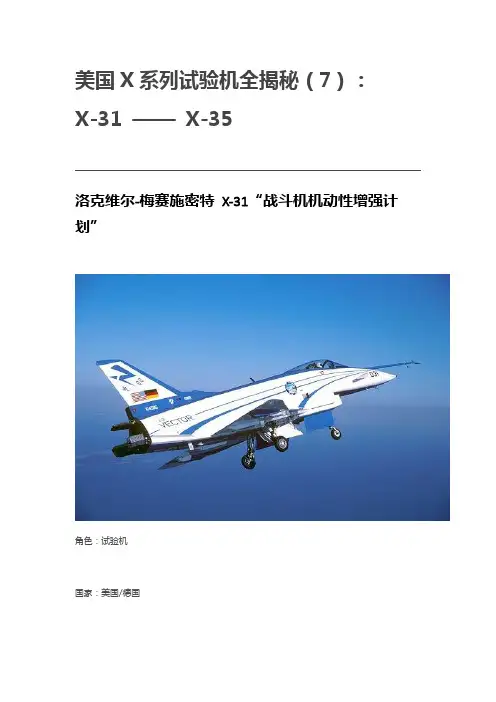
美国X系列试验机全揭秘(7):X-31 ——X-35洛克维尔-梅赛施密特X-31“战斗机机动性增强计划”角色:试验机国家:美国/德国制造商:洛克维尔/梅赛施密特首飞:1990主要用户:国防部高级研究计划局(DARPA) NASA 德国航空航天局建造数量:2X-31“战斗机机动性增强计划”的主要目的就是为了测试战斗机矢量推进技术。
矢量推进能力使得X-31能朝向任意方向飞行,这能使传统战机的机动性得到显著提升。
试验机搭载了先进的飞行控制系统,即便是在能使普通航空器失速的高迎角下依旧能继续保持飞机的操控。
历史X-31共建造两架,第一架试验机首飞于1990年10月11日。
在1990年到1995年间共进行了超过500次测试飞行。
X-31机尾加装了边条,同时前部还加装一对计算机控制的全动鸭翼以增加稳定性和机动性。
该机型并无水平尾翼,仅有一个带方向舵的垂直尾翼。
俯仰和偏航动作则依靠尾部喷口的三块桨状物来控制(矢量推进)。
最终,X-31的模拟测试结果表明采用无水平尾翼设计的X-31同样可以保持飞行稳定,矢量推进尾喷口可以提供足够的俯仰和偏航控制。
在试飞期间,X-31完成了多个里程碑。
1992年11月6日,X-31达成了70°迎角的可控飞行,1993年4月29日,第二架X-31利用“过失速”(post-stall)机动达成了一个180°快速最小半径转弯。
由于不存在普通飞机的气动限制,X-31机动性十分卓越。
这一革命性的机动动作以一位名叫沃尔夫冈·赫布斯特的梅赛施密特员工命名——赫布斯特机动(Herbst maneuver)。
赫布斯特是在空战中应用“过失速”机动理论的支持者,并且设计了之后基于X-31设计的洛克维尔SNAKE。
赫布斯特机动图解上世纪90年代初,X-31计划迎来了第二春。
VECTOR(Vectoring Extremely short takeoff and landing Control,and Tailless Operations Research,矢量推力的超短距起飞着陆控制和无尾飞行研究)计划启动,并追加了5300万美元投资。
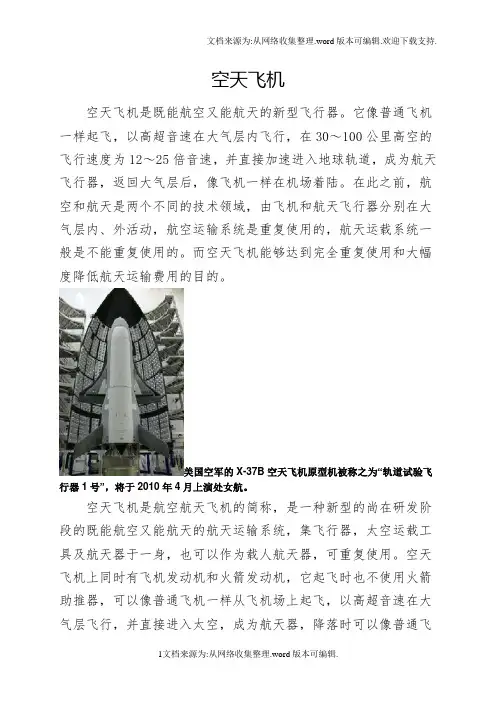
空天飞机空天飞机是既能航空又能航天的新型飞行器。
它像普通飞机一样起飞,以高超音速在大气层内飞行,在30~100公里高空的飞行速度为12~25倍音速,并直接加速进入地球轨道,成为航天飞行器,返回大气层后,像飞机一样在机场着陆。
在此之前,航空和航天是两个不同的技术领域,由飞机和航天飞行器分别在大气层内、外活动,航空运输系统是重复使用的,航天运载系统一般是不能重复使用的。
而空天飞机能够达到完全重复使用和大幅度降低航天运输费用的目的。
美国空军的X-37B空天飞机原型机被称之为“轨道试验飞行器1号”,将于2010年4月上演处女航。
空天飞机是航空航天飞机的简称,是一种新型的尚在研发阶段的既能航空又能航天的航天运输系统,集飞行器,太空运载工具及航天器于一身,也可以作为载人航天器,可重复使用。
空天飞机上同时有飞机发动机和火箭发动机,它起飞时也不使用火箭助推器,可以像普通飞机一样从飞机场上起飞,以高超音速在大气层飞行,并直接进入太空,成为航天器,降落时可以像普通飞机一样在飞机场降落。
空天飞机将是21世纪世界各国争夺制空权和制天权的关键武器装备之一。
目前美国、俄罗斯、中国、日本、德国都在研究空天飞机,其中美国已经研制成功,并已于2010年试飞。
空天飞机能自由往返于天地之间,凡是航天飞机能干的事,它几乎都能胜任。
它可以把大的卫星送入地球轨道,一次投放多颗卫星更是它的拿手活儿;它能对在轨道上运行的卫星进行维修或回收,也可以对敌国的卫星实施破坏,甚至收为己有;它能向空间站运送或接回宇航员和各种物资;更重要的是它还能执行各种诸如拦截、侦察和轰炸等军事任务。
空天飞机飞行速度很快,便于实现全球范围内的快速客运,地球上任何两个城市间的飞行时间都用不了2个小时。
[1]空天飞机20世纪60年代初,就有人对空天飞机作过一些探索性试验,当时它被称为“跨大气层飞行器”。
由于当时的技术、经济条件相差太远,且应用需求不明确,因而中途夭折;80年代中期,在美国的“阿尔法”号永久性空间站计划的刺激下,一些国家对发展载人航天事业的热情普遍高涨,积极参加阿尔法号空间站的建造。
美国航天飞机简介航天飞机1969年4月,美国宇航局提出建造一种可重复使用的航天运载工具的计划。
1972年1月,美国正式把研制航天飞机空间运输系统列入计划,确定了航天飞机的设计方案,即由可回收重复使用的固体火箭助推器,不回收的两个外挂燃料贮箱和可多次使用的轨道器三个部分组成。
经过5年时间,1977年2月研制出一架创业号航天飞机轨道器,由波音747飞机驮着进行了机载试验。
1977年6月18日,首次载人用飞机背上天空试飞,参加试飞的是宇航员海斯(C·F·Haise)和富勒顿(G·Fullerton)两人。
8月12日,载人在飞机上飞行试验圆满完成。
又经过4年,第一架载人航天飞机终于出现在太空舞台,这是航天技术发展史上的又一个里程碑。
航天飞机是一种为穿越大气层和太空的界线(高度100公里的关门线)而设计的火箭动力飞机。
它是一种有翼、可重复使用的航天器,由辅助的运载火箭发射脱离大气层,作为往返于地球与外层空间的交通工具,航天飞机结合了飞机与航天器的性质,像有翅膀的太空船,外形像飞机。
航天飞机的翼在回到地球时提供空气刹车作用,以及在降跑道时提供升力。
航天飞机升入太空时跟其他单次使用的载具一样,是用火箭动力垂直升入。
因为机翼的关系,航天飞机的酬载比例较航天飞机精彩图片(17张)低。
设计者希望以重复使用性来弥补这个缺点。
虽然世界上有许多国家都陆续进行过航天飞机的开发,但只有美国与前苏联实际成功发射并回收过这种交通工具。
但由于苏联瓦解,相关的设备由哈萨克接收后,受限于没有足够经费维持运作使得整个太空计划停摆,因此全世界仅有美国的航天飞机机队可以实际使用并执行任务编辑本段航天飞机失重值航天飞机升空时的重量比火箭大许多,所以加速度较小,一般是3G(火箭是4-4.5G).另外,太空游客也是航天员。
乘坐飞船或者航天飞机上天的人都是航天员,也就是说这些人在上天前都已经具备了航天员的要求。
在飞天之前,这些普通人都是经过严格的身体检查和长时间的正规的航天员培训,经考核合格的.只是“太空游客”所承担的太空飞行任务不同,他是作为航天载荷任务专家参与飞行的,他与驾驶员、工程师的任务不同,所以对身体的要求相对低一些。
GPS相关的报告一、全球定位系统产生与发展1、子午卫星系统子午卫星系统是美国海军研制、开发、管理的第一届卫星导航系统。
该系统采用多普勒测量的方法来进行导航和定位。
1964年1月,子午卫星系统正式建成并投入军用。
1968年七月,该系统解密,同时同民用。
用户数增加,最终达到95000个用户。
其中军方用户只有650家,不足总数的1%子午卫星系统全在局限性。
(1)一次定位所需的时间长:这缺点是由多普勒定位方法的本质决定的。
(2)不是一个连续的、独立的定位系统:导航定位的不连续性使子午为星系无法成为一种独立的导航系统2、GPS定位系统全球定位系统是继美国阿波罗登月计划和航天飞机计划后又一重大的空间计划。
整个系统的研制组建工作分法案论证、大规模工程研制和生产工业三个阶段进行,耗资200亿美元。
经过20年的努力,该系统终于建成并投入运用。
1993年7月,进入轨道可正常工作的block 1试验卫星和block2、block3工作卫星总和已达到24颗,系统已具备了全球定位导航能力,故美国国防于1993年12月8日正式宣布全球定位系统已具备初步工作能力IOC。
制组建试验阶段已经结束,1995年4月27日,内锅空军空间部宣布全球定位系统已经具备完全工作能力。
因为此前不计试验卫星在内,已进入预定轨道能正常工作卫星已达24颗。
目前,GPS作为新一代的卫星导航定位系统,已在军事,交通运输。
测绘、高精度时间比对及资源调查等领域中得到了广泛的应用。
二、其他卫星导航定位系统(1)GLONASSGLONASS是前苏联研制,组建的第二代卫星导航定位系统,现由俄罗斯负责管理和维持。
该系统和GPS一样,也采用距离交会远离进行工作,可为地球上任何一个地方及近地空间的用户提供连续的、精确的三维坐标、三维速度和时间信息。
(2)伽利略卫星导航定位系统2002年3月,决定启用伽利略系统组建计划。
研究结果表明,伽利略计划能为欧洲创造14万个就业岗位,年创经济效益90亿欧元。
全⾯解读NASA超重型⽕箭“航天发射系统”(SLS)导读:2011年9⽉,NASA正式启动了新⼀代重型运载⽕箭即“航天发射系统”(Space Launch System,SLS)的研制,以满⾜未来载⼈深空探测的需要。
SLS项⽬是美国20世纪60年代“阿波罗”载⼈登⽉计划研制发射“⼟星”-5重型⽕箭之后,NASA启动的运载能⼒超过百吨的超重型运载⽕箭计划。
本期⽂章将为⼤家全⾯解读SLS项⽬的发展历程、构型⽅案、项⽬规划及特点。
SLS项⽬的发展历程早在20世纪80年代中期⾥根总统到⽼布什执政期间,美国NASA和国防部就开展了继⼟星-5(Saturn-5)之后下⼀代重型运载⽕箭的⽅案研究,并将⼈类重返⽉球并探索⽕星作为重要发展⽬标。
为此,NASA开展了新⼀轮的重型运载⽕箭⽅案研究,并提出多种构型⽅案。
克林顿执政后,将“改进型⼀次性运载⽕箭”(EELV)作为美国航天运输系统的发展重点,研制了美国现役的主⼒⽕箭—德尔塔-4(Delta-4)和宇宙神-5(Atlas-5)系列。
但在此期间,超重型运载⽕箭的发展并⽆实质性进展。
2004年⼩布什上任后,提出了“星座”⼯程研制计划,NASA牵头开展了新⼀轮超重型运载⽕箭的⽅案论证。
最终NASA选择了战神-1载⼈⽕箭(Ares-1)和战神-5载货重型(Ares-5)⽕箭⽅案,并逐步开展研制⼯作。
战神项⽬和SLS项⽬对⽐,可见SLS结构很⼤程度上借鉴了战神项⽬然⽽到了2010年,奥巴马政府以实现的⽬标与所需资源不匹配为由终⽌了⼩布什政府制订的以载⼈探⽉为主的“星座”计划,取消了为重返⽉球研制的“战神”⽕箭计划,并将重返⽉球调整为以探索⽉球、⼩⾏星和⽕星为主线的载⼈深空探测。
2011年9⽉,美国航宇局((NASA)正式启动了新⼀代重型运载⽕箭即“航天发射系统”(SLS)的研制,并将其作为战略⽬标予与实施,以满⾜未来载⼈深空探测的需要。
SLS与美国主流重型运载⽕箭对⽐,与美国现役的德尔塔4,宇宙神5等⼤型运载⽕箭相⽐,其低轨运载能⼒从20余吨提⾼到70吨~130吨。
美国和苏联的航天飞机2010-03-25我们都知道美国和俄罗斯是两个航天大国,初了火箭之外还有航天飞机。
1969年4月,美国宇航局提出建造一种可重复使用的航天运载工具的计划。
1972年1月,美国正式把研制航天飞机空间运输系统列入计划,确定了航天飞机的设计方案。
经过5年时间,1977年2月研制出一架“企业号”航天飞机轨道器,1977年2月15日,进行了3次滑行测试飞行。
1977年2月18日到1977年3月2日,进行了5次机载背负飞行测试,载机为波音747。
1977年6月18日,首次载人用飞机背上天空试飞,参加试飞的是宇航员海斯(C.F.Haise)和富勒顿(G.Fullerton)两人。
随后又进行了8次载人飞行测试,1977年10月26日,载人飞行试验圆满完成。
“企业号”实际上它是一个纯粹的测试平台,没有发动机,没有设备,没有执行太空任务的功能。
本来“企业号”是准备作为“哥伦比亚号”之后的第二架航天飞机的,但是后来NASA发觉改装测试平台STA-099更划算,而后来“奋进号”又被建造出来,“企业号”就再也没有上天的机会了。
1977年,美国又建造了“开路者号”航天飞机,后运往肯尼迪航天中心用作地面测试之用,实际上不具备飞行能力。
由于开路者号与真正的航天飞机具有相似的重量、形状和尺寸,一些测试可以在其身上进行,而不必使用更加精密且昂贵的“企业号”航天飞机。
又经过4年,第一架载人航天飞机终于出现在太空舞台,这是航天技术发展史上的又一个里程碑。
1981年4月12日,在卡纳维拉尔角肯尼迪航天中心聚集着上百万人,参观第一架航天飞机“哥伦比亚号”的发射,首次执行STS-1任务,开启了NASA的太空运输系统计划(Space Transportation System program,STS)之序章,宇航员翰·杨(John W.Young)和克里平(Robert L.Crippen)揭开了航天史上新的一页。
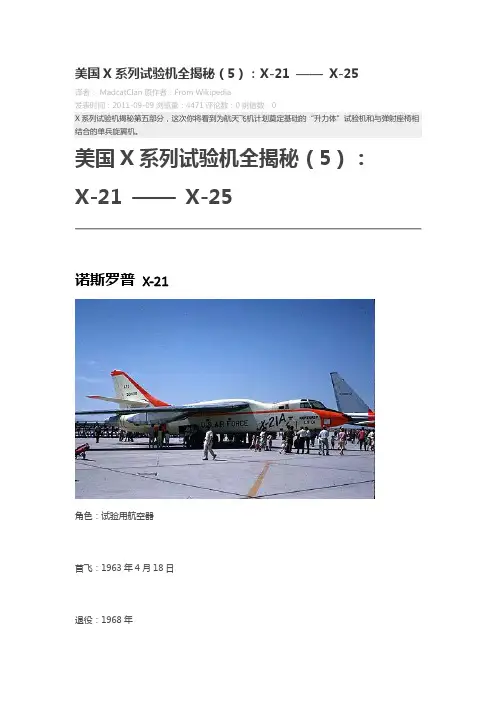
美国X系列试验机全揭秘(5):X-21 ——X-25译者: MadcatClan原作者:From Wikipedia发表时间:2011-09-09浏览量:4471评论数:0挑错数:0X系列试验机揭秘第五部分,这次你将看到为航天飞机计划奠定基础的“升力体”试验机和与弹射座椅相结合的单兵旋翼机。
美国X系列试验机全揭秘(5):X-21 ——X-25诺斯罗普X-21角色:试验用航空器首飞:1963年4月18日退役:1968年主要用户:美国国家航空航天局(NASA)建造数量:2诺斯罗普X-21A是一种设计用来测试机翼层流效应控制的试验机。
X-21基于道格拉斯WB-66D机身建造。
采用嵌入机翼式引擎以便给空气压缩机腾出空间。
于1968年4月18日由NASA试飞员杰克·威尔斯驾驶进行了首飞。
尽管试飞顺利完成,但大量错综复杂的层流效应依旧导致了整个计划被终止。
设计与研发层流控制是一项能够明显改善摩擦系数使得航空器大大降低油耗,提升航程的技术。
理论上讲,如果80%的机翼是由层状体组成则摩擦能减小25%。
机体表面与空气摩擦产生的力,即粘滞曳力——在紊流边界层的粘滞曳力要比层流层大得多。
层流控制主要依靠多孔材料、多重狭窄表面缝隙或小孔来移除部分在边界层流动的空气实现。
X-21进行了两项主要改造,首先是将Allison J71引擎替换为“通用电气”XJ79-GE-13涡轮喷射引擎。
X-21A试验机同时还由精密的层流控制系统组成,机翼上总共条有80000个槽,他们能将紊流边界层“吸入”,从而产生一个平滑的层流层。
理论上这样能减少空气摩擦,使飞机能有更低的油耗和更大的航程。
测试在测试中有孔材料的主要问题是槽孔会被碎屑、小虫甚至雨水堵住。
在特定条件下,层流表面空气的急速冷却会产生冰晶扰乱层流。
最终这个项目由于槽孔堵塞问题而被取消。
无论如何,从X-21试飞中获取的实验数据还是很有价值的。
包括不规则表面、边界层扰动效应以及恶劣环境大气中的冰晶对机翼的影响。
美国GPS系统GPS(Global Position System)全球定位系统是目前最成熟的卫星定位导航系统。
它是美国从上世纪70年代开始研制,历时20年,耗资近200亿美元,于1994年全面建成的新一代卫星导航与定位系统。
GPS利用导航卫星进行测时和测距,具有在海、陆、空全方位实时三维导航与定位能力。
它是继阿波罗登月计划、航天飞机后的美国第三大航天工程。
如今,GPS已经成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。
GPS全球定位系统由空间系统、地面控制系统和用户系统三大部分组成。
其空间系统由21颗工作卫星和3颗备份卫星组成,分布在20200千米高的6个轨道平面上,运行周期12小时。
地球上任何地方任一时刻都能同时观测到4颗以上的卫星。
地面控制系统负责卫星的测轨和运行控制。
用户系统为各种用途的GPS 接收机,通过接收卫星广播信号来获取位置信息,该系统用户数量可以是无限的。
GPS全球定位系统是美国为军事目的而建立的。
1983年一架民用飞机在空中因被误以为是敌军飞机而遭击落后,美国承诺GPS免费开放供民间使用。
美国为军用和民用安排了不同的频段,并分别广播了P码和C/A码两种不同精度的位置信息。
目前美国军用GPS精度可达1米,而民用GPS理论精度只有10米左右。
特别地,美国在90代中期为了自身的安全考虑,在民用卫星信号上加入了SA (Selective Availability),进行人为扰码,这使得一般民用GPS接收机的精度只有100米左右。
2000年5月2日,SA干扰被取消,全球的民用GPS接收机的定位精度在一夜之间提高了许多,大部分的情况下可以获得10米左右的定位精度。
美国之所以停止执行SA政策,是由于美国军方现已开发出新技术,可以随时降低对美国存在威胁地区的民用GPS精度,所以现在这种高精度的GPS技术才得以向全球免费开放使用。
受应用需求的刺激,民用GPS技术蓬勃发展,出现了DGPS(差分GPS)、WAAS(地面广播站型态的修正技术)等技术,进一步提高民用GPS的应用精度。
美国X系列试验飞行器简史X-1X-1 试验飞机作为人类历史上一种划时代的飞机,不仅仅是因为它的速度超过了音速,也是因为它是世界上第一种纯粹为了试验目的而设计制造的飞机。
X-1 最初设想来自于 20 世纪 30 年代末飞机设计领域所遇到的问题,当时建造的风洞已经不能满足飞机在亚音速和超音速飞行条件下各种参数的正确搜集,因而研制一种专用的飞行试验机势在必行。
贝尔飞机公司制造的 3 架 X-1 机长 9.45 米,机高 3.35 米,翼展 8.53 米,其机身形状与 12.7 毫米机枪子弹极其相似,这样可在超音速飞行时保持机体的稳定。
X-1 的机翼为平直翼,翼面厚度很小。
XLR-11 火箭发动机为其提供动力,其燃料为液氧与酒精和水的混合物。
X-1-1、X-1-2 于 1945 年相继出厂开始了试验飞行,与此同时 NACA(美国国家航空咨询委员会,美国国家航空航天局 NASA 的前身)也加入了 X-1 项目的研制工作。
X-1 试验机和 B-29 载机超音速飞行中的 X-11947 年 10 月 14 日,试飞员查理斯.耶格尔驾驶 X-1-1 在 43,00 英尺的高空飞出了 1.06 马赫的高速,从而迈出了人类超音速飞行的第一步。
不久,X-1-2 在飞行试验中速度也超过了音速。
1950 年 5 月 12 日,X-1-1 在耶格尔的驾驶下完成了最后一次试验光荣退休了。
随后,X-1-2 也停止了飞行开始进行改造。
NACA 的工程师们为 X-1-2 设计了新的机翼和新型的涡轮泵燃油系统,另外还将试飞员从侧面舱门进入驾驶舱的设计改为向上开启的座舱盖,这样 X-1-2 就成为了 X-1E。
X-1E 是用来验证薄翼气动特性的,它是第一架采用 4% 机翼厚度飞行成功的飞机。
另外还有必要提一下 X-1-3,由于其燃料供给系统进行了改进,所以其理论最高速度可以达到 2.4 马赫,远远超过了前两者。
但这架 X-1-3 运气不太好,在一次试飞中由于燃料泄漏事故和载机 B-50 一起在空中炸成了碎片。
航天飞机的基本结构航天飞机的基本结构包括以下几个主要部分:1. 宇航器:宇航器是航天飞机的主体部分,通常有翼和机身两部分组成。
机身是宇航器的主要结构部分,包括航天员的驾驶舱、货舱和发动机等。
翼是用来提供升力和控制飞行的结构部分,通常有固定翼和可变后掠翼两种类型。
2. 推进系统:推进系统是航天飞机的动力来源,它一般由固体火箭助推器和液体燃料火箭发动机组成。
固体火箭助推器通常用在航天飞机发射时的起飞阶段,而液体燃料火箭发动机则用于飞行过程中的姿态调整和轨道变换。
3. 降落伞系统:航天飞机在返回地球时需要减速和着陆,降落伞系统用来控制飞行器的下降速度和实现安全着陆。
航天飞机通常使用多个降落伞来增加稳定性和安全性。
4. 热保护系统:航天飞机在大气层进入和返回过程中会遭受高温和高压力等极端条件,热保护系统用来保护航天器和航天员免受热量和压力的损害。
常见的热保护系统包括隔热瓦块、热防护涂层和耐热材料等。
5. 控制系统:控制系统用来控制航天飞机的姿态和飞行轨迹,包括飞行计算机、姿态控制系统和推进器控制系统等。
这些是航天飞机的基本结构,根据具体的任务需求和设计要求,不同的航天飞机还可能具有其他的附加部件和系统。
继续对航天飞机的基本结构的讨论。
6. 起落架系统:起落架系统用于在降落时支撑并减缓航天飞机的着地冲击力。
通常,航天飞机的主起落架安装在机身底部,并可收放式设计。
7. 电力系统:航天飞机需要提供电力来驱动各个系统和设备的运行,例如操纵系统、通信系统和生命支持系统等。
电力系统通常由太阳能电池板和电池组成,以及相应的电力管理和分配系统。
8. 通信和导航系统:航天飞机需要与地面指挥中心和其他航天器进行通信,并需要进行精确的导航和定位。
通信系统通常包括天线和相关设备,导航系统则包括惯性导航系统和全球定位系统(GPS)等。
9. 生命支持系统:为了维持航天员在宇宙空间中的生存和工作,航天飞机还配备了生命支持系统,包括供氧系统、水循环系统和废物处理系统等。
美国X系列验证机1. X-30X-30 是由美国国防部和NASA 共同组织研制的一种双座高超音速研究机,同时也是由DARPA 提出的国家空天飞机(NASP)计划的原型机。
X-30 实际上是一种能水平起降单级入轨、高超音速的航天飞机,采用尖头狭身机体大后掠三角翼单垂尾布局,以减少高速飞行时的阻力。
X-30 的机身从前到后为头锥、两人驾驶舱、电子设备舱、燃料舱,在机体腹部的动力装置由涡轮冲压/超音速燃烧冲压/入轨和再入大气火箭发动机构成,机体主要使用钛基复合材料,表面高热部分用带有内部冷却系统的防热材料敷设。
由于其研制难度太大和研制费用过高,X-30 项目仅仅只是停留在缩比模型研究阶段,并在1994 年11 月被取消,因而没有建造任何全尺寸实体样机。
X-30 的想象图2. X-33X-33 由洛克希德.马丁公司著名的“臭鼬工程队”研制,它是无人驾驶单级入轨可重复使用航天运载飞行器“冒险星”的1/2 比例的原型机,机长20.29 米,机高 5.88 米,翼展22.06 米。
X-33 采用垂直起飞方式,亚轨道飞行,能在飞行跑道上着陆。
X-33的动力采用一台波音公司特别开发的J2S 火箭发动机,其余部件也是包含了诸多高科技元素。
2001 年 3 月,同样由于存在诸多难以突破的技术难关(如线性气塞式发动机),NASA 取消了已经耗资了13 亿美元的X-33 项目。
X-33 想象图3. X-36由NASA 和波音公司(原麦道公司)联合研制的X-36 是一种遥控无尾技术验证机,它在试验中获取的的数据将能极大的提升未来战斗机空战操控性和生存能力。
X-36 将用来研究战斗机隐身设计与飞行敏捷性的配合,及其对其它性能的影响。
X-36 机长5.55 米,翼展3.175 米,机高0.95 米,空重494 千克,最大起飞重量576 千克,最大速度为450 公里/小时。
X-36 采用翼身融合设计鸭式布局构型,没有大多数传统飞机上的垂直尾翼和水平尾翼结构。
航天飞机介绍飞机不能进入太空,而火箭使用一次就报废。
人们在思索,能否研制一种能进入太空的飞机呢?利用火箭发动机使飞机进入高空(没有空气阻力)的想法由来已久。
早在1933年德国人桑格尔就写了一本书,叫做《火箭飞行技术》,提出制造用液体火箭发动机做动力的超级轰炸机的可能性。
第二次世界大战中他设计了一架火箭轰炸机,推力约1000千牛,用6000吨固体火箭助推起飞,可飞高145千米,航程达2万多千米,最大速度21240千米/小时(5.9千米/秒),绕地球一圈需150分钟。
但计算表明,要求发动机比推力400秒·质量比(总重对空重之比)等于10才行。
而且研制费要300万英镑,故未能成为现实。
德国人便把重点放在设计火箭歼击机上,最有名的是1940年研制的MC—163原型机,这用两个109—509A2 火箭发动机(推进剂为过氧化氢)做动力,速度达965千米/小时。
但发动机只能工作4.5分钟,在空中仅能停留20分钟,很显然是不能打仗的。
第二次世界大战期间美国也制成了贝尔X—1火箭飞机(推进剂用液氧和酒精),于1944年12月飞行时最大速度达到1280千米/小时。
1946年用B—29轰炸机把X—1带入高空抛放,然后自飞,创造了时速达1600千米。
后来道格拉斯公司在50年代又研制了D-558—2MK—1和D-558—3MK—2火箭飞机。
但没有实际应用,可经验是宝贵的。
美国人搞航天飞机的想法由来已久。
50年代初贝尔公司的道伦博格(前纳粹研制火箭的负责人)根据桑格尔的设想提出“波米”计划,为二级火箭航天飞机,形状和发射方式与“哥伦比亚”号航天飞机相差无几。
可惜因技术关键太多未能开展研制。
布劳恩此时曾在《柯里尔》杂志上撰文倡议研制航天飞机,我国火箭专家钱学森也曾研究过带翼的太空飞机问题,对美国朝野影响很大。
1957年在前苏联卫星的刺激下空军提出用“大力神”Ⅲ发射“迪纳—索尔”航天飞机的方案(又称X—20)。
搞了6年,终因耗资过大,而被更简单的航天飞行器所代替。
全球定位系统(GPS)基本原理及常识迪亚戈全球定位系统(GPS)是美国继阿波罗登月、航天飞机之后的第三大航天工程,利用围绕地球的24颗卫星发射信号进行经纬度和高度的定位,围绕地球的24颗卫星成互差120度的平面排列。
可为近地空间的各类用户实时提供精密三维位置坐标、三维速度和时间(PVT)等信息,用于对全球的民用及军用飞机、舰船、人员、车辆等提供实时导。
GPS卫星同时发射两种码,一种为P码,我们称之为细码,一种是C/A码,我们称之为粗码。
P码的精度非常高,通常可以控制在误差3米以内,但只为军方服务。
而我们使用的为C/A码,精度在14米以内。
两个坐标点,我们可以确定一个平面内的一点,如果知道三个坐标点我们就能够知道空间当中的任意一点位置。
而GPS可以利用三颗卫星进行经纬度X,Y 的定位,而四颗卫星可以进行经纬度和高度X,Y,Z三维定位,四颗卫星三颗进行坐标定位,一颗卫星进行时钟矫正。
GPS除了具备测量经纬度和高度的作用以外,GPS还具有其他一些功能,比如利用上一次定位的坐标和这次定位的坐标差进行测速,利用两次坐标差进行方向的定位,利用行进轨迹进行里程的计算和面积的计算等等。
还有包括计算地理位置的月相,日初日落时间,潮汐,太阳月亮的方位,有些GPS内置电子气压计,还能计算大气压并且预测天气。
GPS是需要和卫星进行联系才能够定位的,城市里的水泥混凝土,树木,高架桥,天线,GPS屏蔽器等都是干扰信号。
因此城市里使用有时候会信号接受不到的情况发生。
那么GPS全球定位系统究竟是什么东西呢?它是一套美国军方设计的,以航天技术为基础的导航与定位系统。
这套系统可以使美军士兵独立测定精度为10米以下的自己的位置。
这个“独立测定”非常重要:在实际使用中,如果这套系统需要士兵发射电波确定自己位置的话,会很容易地被敌方侦测到自己的实际位置,所以整个地面接收系统需要完全被动接收信号。
由于美国全球战略的需要,这套系统需要覆盖全世界,并且的用户接收端的成本要非常低,因为系统的设计要求是每个士兵、每台军车都要安装接收系统。
航天飞机(Space Shuttle)航天飞机是一种载人往返于近地轨道和地面间的有人驾驶、可重复使用的运载工具。
它既能像运载火箭那样垂直起飞,又能像飞机那样在返回大气层后在机场着陆。
航天飞机由轨道器、外贮箱和固体助推器组成。
航天飞机为人类自由进出太空提供了很好的工具,是航天史上的一个重要里程碑,最早由美国研发。
著名的航天飞机有美国的哥伦比亚号、挑战者号、发现号、亚特兰蒂斯号和奋进号,以及前苏联的暴风雪号。
特点与用途航天飞机与弹道式运载火箭相比,具有以下优点:1)可以重复使用。
2)维修方便,发射程序简化,有利于空间活动经常化和快速反应。
3)执行任务较灵活。
航天飞机配上各种上面级,可以满足发射各种低、中、高轨道卫星和星际探测器的要求。
4)可以使卫星设计简化,可靠性提高,工作寿命延长,从而减少卫星研制的总费用。
5)上升段和再入段过载较小,未经严格空间飞行训练的普通人员也可参加空间活动。
航天飞机的主要用途有:部署卫星、检修卫星、回收卫星、太空营救、空间运输、空间实验和生产、空间探测。
航天飞机的发射与返回,一般都是在预定的程序内自动进行的,也可以由宇航员自行操纵。
它的常规飞行程序大致有以下步骤:1.起飞。
航天飞机直立在发射台上,两台固体火箭助推器和三台液体火箭基本同时点火(三台主发动机点火时间间隔0.12秒,然后是固体火箭点火),固定航天飞机系统的系留带松脱,航天飞机垂直上升;2.助推火箭分离。
航天飞机上升约120秒时,达到40公里高度,助推器燃料耗尽,自动熄火并同航天飞机分离,主发动机继续工作,航天飞机持续上升。
助推器在海上回收;3.外挂燃料箱脱落。
航天飞机起飞后500秒左右,到达100多公里高度,时速达每秒7.8公里,外挂燃料箱推进剂耗尽并自动与轨道器分离,陨落大气层烧毁;4.轨道器入轨。
轨道器以28800公里的时速飞行,依靠自身的44个小型喷气发动机(它们可以单独点火,也可以串联点火),即轨道机动动力系统调整到达预定轨道;5.返航。
关于航天飞机的资料1. 简介航天飞机(Space Shuttle)是一种多用途的可重复使用航天器,由美国国家航空航天局(NASA)开发和运营。
航天飞机的主要任务是将宇航员和货物运送到地球轨道,并在任务结束后返回地面。
它是人类历史上第一种完全可重复使用的航天器,具有极高的灵活性和经济性。
2. 发展历史航天飞机的概念最早可以追溯到20世纪60年代初。
当时,NASA开始研究并设计一种具备可重复使用能力的航天器,目的是提高航天任务的效率和成本效益。
1969年,美国政府正式批准了航天飞机项目,并于1972年开始建造第一架航天飞机。
1981年,哥伦比亚号成为第一架进行太空任务的航天飞机。
3. 结构和特点航天飞机的整体结构包括飞船本体、两个固体火箭助推器和外部燃料箱。
飞船本体采用翼身结合设计,具有自主着陆和滑行能力。
航天飞机的特点如下: - 可重复使用:航天飞机可以进行多次太空任务,并在任务结束后返回地球。
- 多用途:航天飞机可以携带宇航员、卫星、科学实验设备等不同类型的货物。
- 载人能力:航天飞机可以搭载最多七名宇航员进行太空任务。
- 空气动力学设计:航天飞机的翼身结合设计可以提供较好的升力和飞行稳定性。
4. 任务和成就航天飞机在其运营期间共进行了135次太空任务。
它的主要任务包括: - 将航天员送入地球轨道,并与国际空间站进行对接。
- 安装、维护和修复卫星。
- 进行科学实验,在太空环境中开展各种研究。
航天飞机取得了许多重要的成就,其中包括: - 发射了首个美国的卫星(STS-1任务)。
- 发射了哈勃太空望远镜,对宇宙进行深入观测。
- 修复了位于轨道上的太空望远镜,使其恢复正常运行。
5. 退役和影响随着时间的推移,航天飞机的运营成本越来越高,飞行安全性也遇到了一些挑战。
因此,NASA在2011年宣布将航天飞机退役,并将其定位为人类太空探索的新一阶段。
航天飞机的退役意味着美国需要寻找其他方式进行太空任务,例如通过商业航天公司的合作。
美国航天飞机(SPACE SHUTTLE)介绍到目前为止共有6架轨道飞行器,它们是OV—101“企业号”(Enterprise)、OV-102“哥伦比亚号”(Columbia)、OV—099“挑战者号”(Challenger)、OV—103“发现者号”(Discovery)、OV—104"阿特兰蒂斯号”(Atlantis)和OV—105"奋进号”(Endeavour)。
“企业号”为试验机,其它5架为工作机,其中“挑战者号”已在1986年1月的事故中炸毁。
航天飞机的研究工作开始于60年代末。
1969年9月“阿波罗”首次登月后2个月,美国总统便指定美国空间工作组研究制定未来空间研究的方针和途径,当年该工作组正式提出研制包括航天飞机在内的新的空间运输系统。
1971年政府正式接受了此项建议,并由总统发出命令。
自此便正式开始了航天飞机的研制工作。
研制工作共分A、B、C、D 4个阶段。
A阶段研究航天飞机外形,并提出进一步研究的要求和方向。
B阶段为技术经济指标确定和方案设计阶段。
C阶段进行技术设计,D阶段为生产和飞行阶段,二者合称C/D阶段。
A阶段开始于1969年。
在该阶段提出两级全部重复使用的航天飞机方案。
方案中锄推器和轨道飞行器的连接方式各有不同,有腹部相接、背驮和并联等几种布局。
大多为直机翼飞行器,设有18.3m×4.6m货舱,可载乘员10人,载货11.3t。
助推器将轨道飞行器送至高空后飞回发射场。
推进系统全部采用液氧/液氢作为推进剂。
1970年3月开始由北美洛克维尔(North America Rockwell)和麦克唐纳—道格拉斯(Mc— Donnell Douglas)公司承担B阶段研究工作。
到1971年6月决定选用满足空军要求的185km轨道运载能力为29.5t并具有高横向机动能力的三角形机翼轨道飞行器方案。
后来因苏联放弃登月竞赛,美国航天预算紧缩,航宇局被迫改变方案,将推进剂箱全部移至轨道飞行器外,并取消重复使用的载人助推器方案。
1972年1月15日美国总统正式宣布研制全新的空间运输系统。
当年3月确定了接近于现有状态的总体方案。
载人回飞型助推器改为弹道回收的并联助推器,轨道飞行器缩小,主发动机由2台大推力发动机改为3台小推力发动机,贮箱移到机体外,姿控和机动发动机改用可贮推进剂。
1970~1980年期间方案变动的大致情况如表所示。
1972年7月NASA指派约翰逊航天中心(Johnson Space Flight Center)负责轨道飞行器管理,马歇尔航天飞行中心(Marshall Space Flight Center)负责轨道飞行器主发动机、外贮箱和固体助推器管理,肯尼迪航天中心(Kenndy Space Center)负责航天飞机组件的组装、测试,及发射,此外由洛克维尔公司负责轨道飞行器的设计与研制、由马丁·玛丽埃塔·丹佛航空公司(Martin Marietta Denver Co.)负责外贮箱的研制与制造,由莫顿聚硫橡胶公司(Morton Thiokol Co.)负责固体助推器的研制与制造,由洛克达因公司(RocketdyneDiv)负责主发动机的研制。
第一架轨道飞行器“企业号”于1976年9月17日出厂。
1977年2月开始进行进场着陆试验。
试验分三组进行。
第一组试验5次,检验用波音747飞机驮飞时的稳定、颤振等特性,轨道飞行器中不载人;第二组作载人飞行试验,共3次,由飞行员检查轨道飞行器爷系统的性能;第三组试验5次,飞行中轨道飞行器与波音747飞机分离,滑翔飞行返回发射场,试验于1977年 11月完成。
之后,1978年3月“企业号”被运往马歇尔航天飞行中心与外贮箱和固体火箭组装进行发射状态的地面振动试验,1979年4月“企业号”运往肯尼迪发射场,在39A综合发射中心与固体助推器和外贮箱组合进行合练。
1981年4月开始飞行试验,原计划试飞6次,但实际在第4次飞行时已携带国防部卫星执行任务。
到1994年底共发射66次,成功率98.48%。
美国航天飞机的研制总费用(包括4次试飞的费用)为124.43亿美元(历年经费总和,未经折算)。
1988年12月STS—27任务的费用为3.75亿美元(当年币值)。
主要技术性能全长 56.14m 轨道机动速度增量304~762.5m/s高 23.34m 乘员3~7人(特殊情况10人)起飞质量≈2041t 有效载荷质量入轨:29.5t起飞推力 30802.7kN 出轨:14.5t过载 <3g 额定地面周转时间14d运行轨道高度 185.0~1110km 横向机动能力≈2000km轨道运行时间 7~30d固体助推器长 45.46m 推进剂质量2×503.63t直径3.70m 推进剂氧化剂:过氯酸铵总质量2×586.51t 燃料:铝粉结构质量2×82.88t 海平面推力2×12899.2kN外贮箱长 47m 结构质量33503kg直径8.38m 液氧质量604195kg总质量 743253kg液氢质量106606kg轨道飞行器长 37,24m 寿命飞行100次高 17.27m 主发动机3台翼展23.79m 推进剂液氧/液氢货舱直径4.5m 推力:真空3×2090.7kN 货舱长度18.3m 海平面3×1668.1kN 乘员舱容积 70.8~80.Om2 比冲:真空4464.5N·s/kg结构质量68.04t 海平面3552.5N·s/kg 满载质量≈102t 轨道机动发动机推力3×26,69kN 横向机动能力≈2000km总体布局美国航天飞机由轨道飞行器、外贮箱、固体助推器三大部分和27个分系统组成。
其组成和布局如图及表所示。
固体助推器航天飞机固体助推器是至今使用的一种最大的也是第一种可重复使用的固体发动机。
2台助推器为航天飞机起飞到45.7km的上升段提供主要推力。
设计要求每台至少使用20次。
助推器的主要组成部分有发动机、结构、分离系统、电子系统、飞行测量系统、配电系统、减速系统和靶场安全自毁系统等。
固体助推器可以互换,它们匹配成对使用,由于助推器喷管延伸段在发动机熄火后抛掉,因而它是一种部分重复使用组件。
结构助推器由鼻锥罩、截锥段、铣切前裙段、发动机壳段、外贮箱连接环、后座环、后裙段和电缆隧道组成。
每台发动机壳体由11件D6AC材料壳段组成。
发动机发动机药柱由氧化剂(69.93%过氯酸铵)、燃料(16%铝粉)、催化剂(0.07%氧化铁)、粘接剂(12.04%多聚物)和固化剂(1.96%环氧树脂)组成。
发动机前部药柱芯孔呈11角星形、尾段和中段呈双截锥形。
此种药柱芯孔布局可使发动机在起飞时提供高推力,到起飞后50s 下降约 1/3,以免运载器在最大动压段承受过高的应力。
固体助推器可互换并配对使用。
每台由4个药柱段组成,每对药柱段用同一批次的装药,以最大程度地降低助推器间的推力不平衡。
发动机发动机药柱由氧化剂(69.93%过氯酸铵)、燃料(16%铝粉)、催化剂(0.07%氧化铁)、粘接剂(12.04%多聚物)和固化剂(1.96%环氧树脂)组成。
发动机前部药柱芯孔呈11角星形、尾段和中段呈双截锥形。
此种药柱芯孔布局可使发动机在起飞时提供高推力,到起飞后50s下降约1/3,以免运载器在最大动压段承受过高的应力。
固体助推器可互换并配对使用。
每台由4个药柱段组成,每对药柱段用同一批次的装药,以最大程度地降低助推器间的推力不平衡。
航天飞机固体发动机装有可摆动的收敛扩散型喷管(见下图)。
喷管以其尾部挠性接头作为摆动机构。
发动机的推力矢量控制是通过喷管摆动进行的,其各向摆动角为8°。
喷管组成如图所示。
喷管挠性接头由天然橡胶弹性体和钢质垫片夹层以及前、后端框组成。
10层金属填片、11层弹性体和端框热粘在一起。
喷管装有推力矢量作动器以及和发动机后壳段适配的连接结构。
喷管延伸段在熄火后抛掉,以减轻挠性接头的撞击损伤。
喷管膨胀比为7.16:1。
分离系统航天飞机固体助推器分离系统由连接释放机构、分离发动机、分离电子系统及各种传感器组成。
连接释放机构固体助推器连接释放机构由8个连接结构和8个分离螺栓组成,每台助推器各4组。
1.前部连接结构前部连接装置位于固体助推器前筒段,它是一种推力紧固件。
其球形件允许固体助推器和外贮箱在分离前相对旋转1°。
该装置有一铝合金蜂窝结构螺栓抓具,防止碎片散射。
2.后部连接结构固体助推器后部通过3根连杆与外贮箱相接。
每根连杆都装有与前部相似的分离螺栓。
后部分离系统满足以下特殊要求:1)连杆需适应助推器和外贮箱之间12.7~15.2cm的纵向相对移动;2)连杆传递1746kN轴向载荷;3)连杆需传送来自轨道飞行器的指令;4)0.01s内完成分离。
3根连杆都安装在固体助推器的外贮箱连接环上。
下连杆和对角连杆采用同一方案,可以互换。
上连杆的设计较为复杂,需满足指令传输和信号测量的要求。
分离发动机航天飞机2枚固体助推器各装8台固体分离发动机。
前部4台、后部4台;发动机与前分离螺栓和连杆的分离起爆器同时点火。
发动机工作0.7s,每台产生推力97.9kN。
前部4台发动机安装在截锥体靠轨道飞行器的一侧。
航天飞机座落在发射台上时喷管向上。
发动机防热罩保证航天飞机上升段热气流不灌入喷管冲击推进剂,以防发动机自动点火。
此外,防热罩还必需保证分离发动机点火时无微粒射流影响轨道飞行器防热系统。
前部发动机防护装置类似铰链盖或舱门。
门打开时铰链受扭弯曲。
铰链的弯曲使门的动能转为热能,门被制动后保持在一定位置,保护轨道飞行器免受射流影响。
另有一锯齿扣装置,保证门不会在打开后再关上。
尾部分离发动机防护装置要简单得多。
分离发动机点火时将其吹开。
由于后部分离发动机位于裙段支撑柱部位,故有3台发动机位于支撑柱的一侧,另1台位于另一侧。
分离发动机和结构分离系统同时点火。
冗余的分离信号送往前部和后部分离发动机系统,起动起爆器。
起爆器的爆炸经2条起爆引信复式接头和8个起爆引信装置传至分离发动机点火器。
分离电子系统固体助推器火工品装置和控制装置间由2台主事件控制器(MEC)进行信号传递和数据测量。
分离系统通过4台尾部信号复合器/信号分离器(MDM)和2台MEC连接。
固体助推器手动分离开关通过4台前部MDM与航天飞机通用计算机接口。
固体助推器电子和测量系统(EIS)提供轨道飞行器和固体助推器分离系统间的接口。
该系统由集成电子组件(1EA)和火工品引爆控制器(PIC)组成。
分离发动机和分离螺栓由IEA进行控制。
尾部IEA提供信号调节和放大、指令传递、数据分配、电力传输。
位于助推器前部的组件通过尾部IEA向前部IEA传输。