OMEGA用户手册 (11)
- 格式:pdf
- 大小:209.95 KB
- 文档页数:2

e-mail:**************User’s GuideTQ504Torque TransducerShop online atINDEX1.Applications and typical attributes ...............................................Page 12.Description of the measurement system ......................................Page 12.1Mechanical design .................................................................Page 12.2Electrical design .....................................................................Page 22.3Angle-of-rotation transducer ...............................................Page 33.Electrical connection of the torque transducer ............................Page 43.1Connector pin assignments ..................................................Page 53.1.1Signals, angle outputs ...........................................................Page 63.2Laying of the output signal cables ......................................Page 63.3Placement of conductors in cable ........................................Page 64.Mechanical installation of the torque transducer........................Page 84.1Suggestions for installation ..................................................Page 85.Mechanical calibration .....................................................................Page 95.1Assembly of a simple calibrating setup............................Page 105.2Sample calculation of lever arm length.............................Page 105.3Electrical calibration.............................................................Page 116.Maintenance......................................................................................Page 117.Troubleshooting guide for transducer shaft...............................Page 12See Data Sheet for technical specificationsi1.Applications and typical attributes• Torque transducer with inductive angular position measurement system.• Measurement of constant and variable torques.• Torque measurement on a rotating shaft.• For laboratory, production and quality assurance applications.• Built- in instrument amplifier.• Built- in angle-of-rotation transducer.2.Description of the measurement system2.1Mechanical design• The transducer consists of a stator through which a bearing-mounted shaft passes.• A certain length of the shaft is utilized to convert the torque into a proportional torsional angle.• This torsional angle or angle of twist is measured between the two ends of this shaft length by an inductive (wave-form) angular position measurement system.• The inductive angular position measurement system converts the angle of twist into a proportional electrical signal.1• The electrical power for operation of the inductive angular positionmeasurement system, which rotates along with the shaft, is provided by meansof a rotary transformer.• The electrical output signal, which is proportional to the torque, is transferredto the stator by a second rotary transformer.• The connection box on the stator contains the electronics, the power supplyunit, and the instrument amplifier.2.2Electrical designThe built-in electronics comprise the following functional groups:• Oscillator for generation of the AC input voltage• Preamplifier for the output signal• Phase-sensitive rectifier for conversion of the AC output signal into a DCvoltage• Output amplifier22.3Angle-of-rotation transducer1.Rotating shaft2.Encoder disk3.Double-arm photoelectric barrier4.Open-collector output (external pull-up resistor required)*Features:• 360 slots in the encoder disk• Two double-arm photoelectric barriers 90°apart.• Number of pulses generated proportional to angle of rotation.* The ohmic value of the resistor depends on the maximum speed of rotation andthe cable length (e.g. 1500 rpm and a 4 m cable, R=3.3kΩ).33. Electrical connection of the torque transducer• Cable type: at least 12 conductors, e.g. LIYCY12 x 0.14• Max. cable length: 15 m43.1 Connector pin assignmentsDescription of interface for Type, art.-no.: 7203Angle outputs: open collector outputs with internal 10k Ωpull-up to +Vop Built in connector: Binder Series 680, type 09-0331-80-12 or equivalent Cable diagram with plugs on both sides5Top view of connector on transducer3.1.1Signals, angle outputs3.2Laying of the output signal cables-Note on safety-• Do not lay together with control lines or lines carrying a high current.• Do not lay close to strong electromagnetic fields, e.g. those of transformers,welding equipment, contactors, motors, etc.• If the above is unavoidable, the cables must be laid in grounded heavygage steel conduit.• At the transducer, lay the cables in a sling in order to prevent vibration-induced damage to them.3.3Placement of conducters in cableIn order to prevent the measurement signal being distorted by the angle pulses,the corresponding conductors should be separated within the cable.6The cable length has virtually no influence on the measurement signal, but in the case of the angle outputs the external pull-up resistances must be properly adjusted.74.Mechanical installation of the torque transducerTransducer with fixed stator:2 holes are provided in the transducer housing for this purpose.• Use displaceable couplings as both shaft ends that are capable of accommodating angular, radial and axial misalignment.• Good results have been obtained with miniature couplings stiff against torsion such as those described in data sheet 8303.At torques of 50 Nm or greater, it is also possible to install the transducer without fixed stator:• In this case, use flexible couplings at both ends.Caution:during installation no impermissibly high torques may beallowed to arise between the two ends of the torque transducer shaft.4.1Suggestions for installationTransducer with fixed stator and couplings able to accommodate angular, radial and axial misalignment at both ends.8This type of installation is possible at torques of 50 Nm and greater.5.Mechanical calibrationTo perform this, a calibration setup with lever arm and weights is needed tocreate a torque.Steps for calibration:a)Apply the rated torque to the transducer, then remove the load again.b)Precisely adjust the transducer to the zero point.c) Apply a known torque to the transducer.d) Set the indicator to the proper value.Recording of a calibration curve:a) Calibrate the transducer as described above.b) Progressively apply greater torques to the transducer in steps of 1/10 up tothe full rated torque. Then gradually remove the torque in the same way. Ateach step, wait at least 30 seconds for the torque reading to stabilize, and thenrecord.95.1A simple calibrating setup5.2Sample calculation of lever arm length10eg. m = 1 kg. Mt = 10 NmL =10Nm sec 21 kg _ 9.80665= 1,0197 m5.3Electrical calibrationA calibration control facility is integrated in the transducer to permit electrical calibration.Procedure for electrical calibration:• Remove all mechanical loads from the transducer (no torque).• Apply the calibration voltage Vc to pin K referenced to pin E.• An output signal corresponding to the rated torque will be emitted.6.Maintenance• Type IE transducers require virtually no maintenance.• The service life expectancy of the bearings within the rated temperature range is approx. 20,000 hours.• The service life expectancy of the bearing within the operating temperature range is approx. 10,000 hours.• The bearings can only be replaced in the factory.• For high-precision applications: recalibrate the transducer once annually (calibration at the factory or using an appropriate calibration setup).• Once a month, check the cable connectors to make sure that they are securely seated.• Check the cables for damage once a month.117.Troubleshooting guide for transducer shaft12ProblemProbable causesRemedial actionShaft does not rotate Bearings are defective due to:freelya) Torsional or flexional vibrations b) Excessive axial or radial loads Return to factoryc) Old or soiled bearings d) Bent shaft Zero point displacement Rotational vibration Readjust zero point on ≤2 %Shock forcesinstrument amplifier Zero offset between 2%Transducer has been overloaded The zero point can be and 5% of range Shock forcesrecalibrated once at Rotational vibrationthe instrument amplifier Transducer has Transducer has been overloaded hysteresis between by changing loads or rotational Return to factoryclockwise and counter-Rotation vibrationclockwise torqueNOTES: 13WARRANTY/DISCLAIMEROMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month grace period to the normal one (1) year product warranty to cover handling and shipping time. This ensures that OMEGA’s customers receive maximum coverage on each product.If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service Department will issue an Authorized Return (AR) number immediately upon phone or written request. Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no charge. OMEGA’s WARRANTY does not apply to defects resulting from any action of the purchaser, including but not limited to mishandling, improper interfacing, operation outside of design limits, improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of having been tampered with or shows evidence of having been damaged as a result of excessive corrosion; or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating conditions outside of OMEGA’s control. Components which wear are not warranted, including but not limited to contact points, fuses, and triacs.OMEGA is pleased to offer suggestions on the use of its various products. However, OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any damages that result from the use of its products in accordance with information provided by OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by it will be as specified and free of defects. OMEGA MAKES NO OTHER W ARRANTIES OR REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESS OR IMPLIED, EXCEPT THAT OF TITLE, AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF LIABILITY: The remedies of purchaser set forth herein are exclusive, and the total liability of OMEGA with respect to this order, whether based on contract, warranty, negligence, indemnification, strict liability or otherwise, shall not exceed the purchase price of the component upon which liability is based. In no event shall OMEGA be liable for consequential, incidental or special damages.CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic Component” under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical applications or used on humans. Should any Product(s) be used in or with any nuclear installation or activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility as set forth in our basic WARRANTY/DISCLAIMER language, and, additionally, purchaser will indemnify OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the Product(s) in such a manner.RETURN REQUESTS/INQUIRIESDirect all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE RETU RNING ANY PRODU CT(S) TO OMEGA, PU RCHASER MU ST OBTAIN AN AU THORIZED RETU RN (AR) NU MBER FROM OMEGA’S CU STOMER SERVICE DEPARTMENT (IN ORDER TO AVOID PROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return package and on any correspondence.The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent breakage in transit.FOR WARRANTY RETURNS, please have the following information available BEFORE contacting OMEGA:1.Purchase Order number under which the productwas PURCHASED,2.Model and serial number of the product underwarranty, and3.Repair instructions and/or specific problemsrelative to the product.FOR NON-WARRANTY REPAIRS,consult OMEGA for current repair charges. Have the following information available BEFORE contacting OMEGA: 1. Purchase Order number to cover the COSTof the repair,2.Model and serial number of the product, and3.Repair instructions and/or specific problemsrelative to the product.OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords our customers the latest in technology and engineering.OMEGA is a registered trademark of OMEGA ENGINEERING, INC.© Copyright 2002 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the prior written consent of OMEGA ENGINEERING, INC.Where Do I Find Everything I Need for Process Measurement and Control?OMEGA…Of Course!Shop online at TEMPERATUREⅪߜThermocouple, RTD & Thermistor Probes, Connectors, Panels & AssembliesⅪߜWire: Thermocouple, RTD & ThermistorⅪߜCalibrators & Ice Point ReferencesⅪߜRecorders, Controllers & Process MonitorsⅪߜInfrared PyrometersPRESSURE, STRAIN AND FORCEⅪߜTransducers & Strain GagesⅪߜLoad Cells & Pressure GagesⅪߜDisplacement TransducersⅪߜInstrumentation & AccessoriesFLOW/LEVELⅪߜRotameters, Gas Mass Flowmeters & Flow ComputersⅪߜAir Velocity IndicatorsⅪߜTurbine/Paddlewheel SystemsⅪߜTotalizers & Batch ControllerspH/CONDUCTIVITYⅪߜpH Electrodes, Testers & AccessoriesⅪߜBenchtop/Laboratory MetersⅪߜControllers, Calibrators, Simulators & PumpsⅪߜIndustrial pH & Conductivity EquipmentDATA ACQUISITIONⅪߜData Acquisition & Engineering SoftwareⅪߜCommunications-Based Acquisition SystemsⅪߜPlug-in Cards for Apple, IBM & CompatiblesⅪߜDatalogging SystemsⅪߜRecorders, Printers & PlottersHEATERSⅪߜHeating CableⅪߜCartridge & Strip HeatersⅪߜImmersion & Band HeatersⅪߜFlexible HeatersⅪߜLaboratory HeatersENVIRONMENTALMONITORING AND CONTROLⅪߜMetering & Control InstrumentationⅪߜRefractometersⅪߜPumps & TubingⅪߜAir, Soil & Water MonitorsⅪߜIndustrial Water & Wastewater TreatmentⅪߜpH, Conductivity & Dissolved Oxygen InstrumentsM2958/0602。

USER MANUAL omega.x haptic device version 1.9Force Dimension Switzerland2summaryThe purpose of this document is>to describe the setup of the omega.x haptic device>to describe the installation of the software drivers and the Force Dimension SDK>to describe the operation modes of the omega.x haptic deviceglossarySDK refers to the Software Development Kit (SDK) for all Force Dimension products. omega.x refers to the base haptic device shared by the omega.3, omega.6 and omega.7 hap-tic devices. Unless specified, all instructions in this manual apply to all three devicetypes.34table of contents1.system overview 72.important safety instructions 83.setting up the omega.x haptic device 9 3.1unpacking the device 93.2installing the power supply 104.configuring the omega.x under Windows 11 4.1installation description 114.2installing the drivers 115.configuring the omega.x under Linux 12 5.1installing the software 12 5.2installation description 125.3installing the drivers 126.configuring the omega.x under macOS 13 6.1installing the software 13 6.2installation description 136.3installing the drivers 137.operating the omega.x 14 7.1coordinate system 14 7.2operating modes 16 7.3running the Haptic Desk program 187.4running the demonstrations programs 198.technical information - omega.3 219.technical information - omega.6 2310.technical information - omega.7 255671. system overviewfigure 1 – overview of the omega.3 haptic device1. base plate2. control unit3. front arms4. end-effector5. force button6. calibration pole7. calibration pit8. status LED 9. force LED 10. user button 11. power switch 12. power connector 13. USB connector2.important safety instructionsIMPORTANTWHEN USING THIS HAPTIC DEVICE, BASIC SAFETY PRECAUTIONSSHOULD ALWAYS BE FOLLOWED TO REDUCE THE RISKOF FIRE, ELECTRICAL SHOCK, OR PERSONAL INJURY.1.read and understand all instructions2.follow all warnings and instructions marked on your haptic device3.do not use or place your haptic device near water4.place your haptic device securely on a stable surface5.make sure that the workspace of your haptic device is free of objects6.do not overload wall outlets and extension cords as this can result in a risk of fire or electri-cal shock7.switch off your haptic device when it is not in use8.to reduce the risk of electrical shock, do not disassemble your haptic device893. setting up the omega.x haptic deviceThis section describes the different steps to follow to safely setup your omega.x haptic device before use.IMPORTANTPLEASE KEEP THE ORIGINAL PACKAGINGONLY USE THE ORIGINAL PACKAGING DURING STORING OR SHIPPING3.1 unpacking the deviceBefore unpacking the omega.x haptic device, remove the haptic device foam stabilizer and theaccessories foam section located inside the shipping box.figure 2 – view when opening the shipping box10Carefully remove the haptic device and the foam stabilizer from the box, then remove the foam stabilizer from the haptic device.figure 3 – view of the shipping box after removal of the foam stabilizer and accessoriesThe accessories compartment contains the power supply, power and USB cables, as well as the USB flash drive.figure 4 – omega.x accessories3.2 installing the power supplyPlug the power supply into the power connector. For safety purposes you should only operate your omega.x haptic device using the original Force Dimension power supply that came with your hap-tic device controller. Replacement power supplies can be ordered directly from Force Dimension.4.configuring the omega.x under WindowsThe USB driver must be first installed onto your system prior to connecting the omega.x to the computer. To do this, perform the following steps:1.plug the Force Dimension USB flash drive into your Windows computer2.open the \Windows folder on the USB flash drive and select the appropriate \32-bit or \64-bit subfolder according to the operating system version on your computer3.run the installation program and follow its instructions4.1installation descriptionThe installation program creates the following subfolders in:C:\Program Files\Force Dimension\sdk-<version>\bin subfolderThis directory contains the demonstration executables and the DLL files required to run the omega.x software. The required DLL files are also copied to the Windows system folder during the installation.\drivers subfolderThis directory contains the USB drivers required to operate your haptic device.\examples subfolderThis directory contains the demonstration programs. Example applications described in section 7.4 and come with their full source code.\doc subfolderAll documentation files and notices are located in that directory.\manuals subfolderAll hardware user manuals are located in that directory.\lib,\include subfoldersThese directories contain the files required to compile your application with the Force Dimension SDK. Please refer to the on-line programming manual for more information.4.2installing the driversUSB driversThe omega.x requires the Force Dimension USB driver. These drivers are installed automatically, and no additional step is required.5.1installing the softwareThe Force Dimension development folder must be installed onto your system before the omega.x can be used. To do this, perform the following steps:1.plug the Force Dimension USB flash drive into your Linux computer2.extract the sdk-<version>.tar.gz archive for your system architecture from the \Linuxsubfolder to the desired location (typically your home folder) by running the following com-mand within the target folder:tar –zxvf sdk-<version>.tar.gz3.this will create a sdk-<version> development folder in the target location5.2installation descriptionThe development folder contains the following directories:\bin subfolderThis directory contains the demonstration executables and the binary files required to run the omega.x software.\examples subfolderThis directory contains the demonstration programs. Example applications described in section 7.4 and come with their full source code.\doc subfolderAll documentation files and notices are located in this subfolder.\manuals subfolderAll hardware user manuals are located in that directory.\lib,\include subfoldersThese directories contain the files required to compile your application with the Force Dimension SDK. Please refer to the on-line programming manual for more information.5.3installing the driversThe Linux version of the Force Dimension SDK requires the development packages for the libusb-1.0 to be installed on your Linux distribution.IMPORTANTPLEASE NOTE THAT USB ACCESS TO THE HAPTIC DEVICE REQUIRES SUPERUSER PRIVILEDGES ON MOST LINUX DISTRIBUTIONS6.1installing the softwareThe Force Dimension development folder must be installed onto your system before the omega.x can be used. To do this, perform the following steps:1.plug the Force Dimension USB flash drive into your Apple computer2.open the sdk-<version>.dmg file for your version of macOS from the \macOS folder andextract the sdk-<version> folder to the desired location (typically your home folder) 3.this will create a sdk-<version> development folder in the target location6.2installation descriptionThe development folder contains the following directories:\bin subfolderThis directory contains the demonstration executables and the binary files required to run the omega.x software.\examples subfolderThis directory contains the demonstration programs. Example applications described in section 7.4 and come with their full source code.\doc subfolderAll documentation files and notices are located in this subfolder.\manuals subfolderAll hardware user manuals are located in that directory.\lib,\include subfoldersThese directories contain the files required to compile your application with the Force Dimension SDK. Please refer to the online programming manual for more information.6.3installing the driversThe macOS version of the Force Dimension SDK uses Apple’s native USB drivers. No further instal-lation is required.7.operating the omega.x7.1coordinate systembase translationThe position of the center of the end-effector (handle) is expressed in Cartesian coordinate and in IUS (metric) unit. Figure 5 illustrates the coordinate system.The actual origin of the coordinate system (0,0,0) is located on a virtual point situated at the cen-ter of the physical workspace of the haptic device.Z-axisY-axisX-axisfigure 5 – Cartesian coordinate system of the omega.x haptic devicewrist orientationThe omega.6 and omega.7 haptic devices incorporate a rotational wrist. The orientation of the wrist is expressed by a reference frame R wrist which is numerically represented using a 3x3 rotation matrix. This reference frame is expressed in relation to the world coordinate system described in figure 5 and is computed from the angle values returned by the joint sensors mounted of each revolute axis of the wrist.Z-axisY-axisX-axisZ-axisY-axisX-axisfigure 6 – reference frame of the wrist (omega.6 and omega.7 haptic devices)gripper angleThe angular position of the force gripper is returned in either degrees or radian.A positive angle value is returned for right-hand omega.7 haptic devices. A negative angle value is returned for left-hand haptic devices.Angular values closer to zero correspond to configurations where the force gripper is in a closed configuration. Opening of the force gripper increases the magnitude of the angle.7.2operating modesstatus indicatorsThe displays the status of the system:>LED OFF the system is off>LED ON the system is ready>LED FLASHING (fast) the system requires calibration>LED FLASHING (slow) the wrist requires manual calibration (omega.6 or omega.7)While the status LED is ON, it is possible to read the position of the of the end-effector, but no forces can be applied. Forces must be enabled by pressing the force button. When the forces are enabled, the force LED is turned ON. Forces can be disabled by pressing force button again.featurescalibrationCalibration is necessary to obtain accurate, reproducible localization of the end-effector within the workspace of the device. The omega.x is designed in such a way that there can be no drift of the calibration over time, so the procedure only needs to be performed once when the device is powered ON.The calibration procedure consists in placing calibration pole in the dedicated calibration pit. The device detects when the calibration position is reached and the status LED stops flashing. Figure 7 illustrates the calibration procedure. After the initial calibration described above, the LED will stop flashing (omega.3).figure 7 – calibration procedureOn the omega.6 and omega.7, the status LED will blink at a slower frequency, indicating that the wrist is usable but not fully calibrated. To fully calibrate the omega.6 and omega.7 wrists, each of the three rotation axes of the wrist and the grasping axis of the omega.7 must be moved by hand to their respective end-stops positions. When the device has reached all end-stops, the LED stops flashing, and the device is now fully calibrated.Alternatively, an automatic calibration procedure of the omega.x active axes can be performed by software using the Force Dimension SDK, for example by launching the application HapticInit which automatically drives the device throughout its workspace. Please do not touch the device during this automatic calibration procedure. After calibration, the device is ready for normal op-eration.gravity compensationTo prevent user fatigue and to improve dexterity during manipulation, the omega.x features gravity compensation. When gravity compensation is enabled, the weights of the arms and of the end-effector are taken into account and a vertical force is dynamically applied to the end-effector in addition to the desired user force command. Please note that gravity compensation is computed on the host computer, and therefore only gets updated every time a new force command is sent to the haptic device by the application. Gravity compensation is enabled by default and can be dis-abled through the Force Dimension SDK.forcesBy default, and when an application opens a connection to the device, the forces are disabled. Forces can be enabled or disabled at any time by pressing the force button.brakesThe device features electromagnetic brakes that can be enabled through the Force Dimension SDK. These brakes are enabled by default every time the forces are disabled. When the brakes are engaged, a viscous force is created that prevents rapid movement of the end-effector.safety featuresThe omega.x features several safety features designed to prevent uncontrolled application of forces and possible damage to the device. These safety features can be adjusted or disabled via a protected command in the Force Dimension SDK.IMPORTANTPLEASE NOTE THAT THE WARRANTY MAY NOT APPLYIF THE SAFETY FEATURES HAVE BEEN OVERRIDEN.When a connection to the omega.x haptic device is made from the computer, the forces are auto-matically disabled to avoid unexpected behaviors. The user must press the force button to enable the forces. This feature can be bypassed through the Force Dimension SDK.If the control unit detects that the velocity of the end-effector is higher than the programmed se-curity limit, the forces are automatically disabled, and the device brakes are engaged to prevent a possibly dangerous acceleration from the device. This velocity threshold can be adjusted or re-moved through the Force Dimension SDK.Please refer to the on-line programming manual for more information.7.3running the Haptic Desk programThe Haptic Desk application is available as a test and diagnostic program and offers the following capabilities:>list all Force Dimension haptic devices connected to the system>test the position reading of the haptic device in Cartesian coordinates>test all force and torque capabilities of the haptic device>run the auto-calibration procedure>read the haptic device status>read the haptic device encoder sensors individually>read the haptic device user button (if available)figure 8 – Haptic Desk test and diagnostic program7.4running the demonstrations programsTwo demonstration programs can also be used to diagnose the device. The source code and an executable file for each of these demonstration programs are provided in two separate directories named \gravity and \torus.Once the system is setup, we suggest running application gravity to check that everything is working properly and to evaluate your system's performance independently of the graphics ren-dering performance. Application torus will allow you to test the combined performance of hap-tics and graphics rendering.gravity exampleThis example program runs a best effort haptic loop to compensate for gravity. The appropriate forces are applied at any point in space to balance the device end-effector so that it is safe to let go of it. The refresh rate of the haptic loop is displayed in the console every second.figure 9 – gravity exampletorus exampleThe torus example displays an OpenGL scene with haptic feedback.figure 10 – torus examplenote – OpenGL must be installed for your compiler and development environment to compile this example. Please refer to your compiler documentation for more information, or consult 8. technical information - omega.3omega.3workspace translation ∅ 160 mm x L 110mmforces continuous 12.0 Nresolution linear < 0.01 mmdimensions height 270 mmwidth 300 mmdepth 350 mmelectronicsinterface standard USB 2.0rate up to 4.0 KHzpower universal 100V - 240Vsoftwareplatforms Microsoft WindowsLinux all distributionsApple macOSBlackberry QNXWindRiver VxWorkslibraries Haptics SDKRobotics SDKfeaturesergonomics the device can be used with both left and right handsstructure delta-based parallel kinematicsactive gravity compensationcalibration automaticdriftlessuser input 1 user buttonsafety velocity monitoringelectromagnetic damping21229.technical information - omega.6omega.6workspace translation ∅ 160 mm x L 110mmrotation 240 x 140 x 320 degforces continuous 12.0 Nresolution linear < 0.01 mmangular 0.09 degdimensions height 270 mmwidth 300 mmdepth 350 mmelectronicsinterface standard USB 2.0rate up to 4.0 KHzpower universal 100V - 240Vsoftwareplatforms Microsoft WindowsLinux all distributionsApple macOSBlackberry QNXWindRiver VxWorkslibraries Haptics SDKRobotics SDKfeaturesergonomics available in left- and right-hand configurationstructure delta-based parallel kinematicshand-centered rotation movementsdecoupling between translation and rotation movementsactive gravity compensationcalibration automaticdriftlessuser input 1 user buttonsafety velocity monitoringelectromagnetic damping232410.technical information - omega.7omega.7workspace translation ∅ 160 mm x L 110mmrotation 240 x 140 x 180 deggripper 25 mmforces continuous 12.0 Ngrasping ± 8 Nresolution linear < 0.01 mmangular 0.09 deglinear 0.006 mmdimensions height 270 mmwidth 300 mmdepth 350 mmelectronicsinterface standard USB 2.0rate up to 4.0 KHzpower universal 100V - 240Vsoftwareplatforms Microsoft WindowsLinux all distributionsApple macOSBlackberry QNXWindRiver VxWorkslibraries Haptics SDKRobotics SDKfeaturesergonomics available in left- and right-hand configurationstructure delta-based parallel kinematicshand-centered rotation movementsdecoupling between translation and rotation movementsactive gravity compensationcalibration automaticdriftlessuser input 1 simulated button using the force grippersafety velocity monitoringelectromagnetic damping252627noticeThe information in this document is provided for reference only. Force Dimension does not assume any lia-bility arising out of the application or use of the information or product described herein. This document may contain or reference information and products protected by copyrights or patents and does not convey any license under the patent rights of Force Dimension, nor the rights of others.All trademarks or trade names are properties of their respective owners.© Copyright 2020 – Force DimensionAll rights reserved.。

安装使用说明Omega轴向中开蜗壳式离心泵本使用说明书包括基本介绍及注意事项。
在泵的安装、电路的连接及泵运行之前,请仔细阅读本说明书。
当涉及到各机组零件时,请务必参照所有其它使用说明书。
在安装的过程中,必须保证断开电源。
以免泵机组突然启动。
目录0 概述 10.0 安全 1 0.1 安全指示的标志 1 0.2 人员限定及培训 1 0.3 不遵守安全细则 1 0.4 安全意识 1 0.5 对操作人员/用户的安全细则 1 0.6 对维护、检查和安装的安全细则 2 0.7 不允许的备件制造和更换 2 0.8 不允许的工况 21.0 运输 2 1.1 安全细则 2 1.2 运输 2 1.2.1 用起吊泵机组 22.0 产品及附件介绍 2 2.1 技术特性 2 2.2 型号意义 2 2.3 零件设计 2 2.3.1 泵壳 2 2.3.2 叶轮 3 2.3.3 泵轴 3 2.3.4 轴封 3 2.3.5 轴承及润滑 3 2.4 安装形式 3 2.5 附件 3 2.6 尺寸及数量 33.0 现场安装 3 3.1 安全细则 3 3.2 装配前的检查 3 3.3 泵/机组的安装 3 3.3.1 安装(现场安装) 3 3.3.2 泵和电机带公共底座的安装 3 3.3.3 泵和电机的调整 3 3.3.4 泵转子防护装置的拆卸 4 3.4 管路连接 4 3.4.1 辅助管路 4 3.4.2 联轴器防护罩 4 3.5 最后的检查 44.0 运行运行、、启动/停机 4 4.1 运行前的检查 4 4.2 轴封 4 4.3 排气 4 4.4 运行 4 4.4.1 检查转子的转向 4 4.4.2 启动 5 4.4.3 泵工作范围 5 4.5 停机/保管/维修 5 4.5.1 新泵的保管 5 4.5.2 长期停止使用时应采取的措施 54.6 保管后的运行 65.0 维护/维修 6 5.1 一般规定 6 5.2 维护/检查 6 5.2.1 运行管理 6 5.2.2 轴封的维护 6 5.2.3 轴承的维护 6 5.3 拆卸 6 5.3.1 基本规定及建议 6 5.3.2 拆卸准备 6 5.4 重新装配7 5.5 附件/零件更换说明8 5.5.1 轴封的更换8 5.5.2 泵体密封环和叶轮密封环的更换8 5.6 一些部件的特殊说明10 5.6.1 填料密封10 5.6.2 机械密封11 5.7 备件16 5.7.1 备件的购买16 5.7.2 备件的建议17 5.7.2.1 建议备件量175.7.2.2 转子部件的互换性176.0 故障及排除18 6.1 概述186.2 故障及排除187.0日常维护及检查周期228.0 联轴器22本使用说明书包括基本介绍及注意事项。
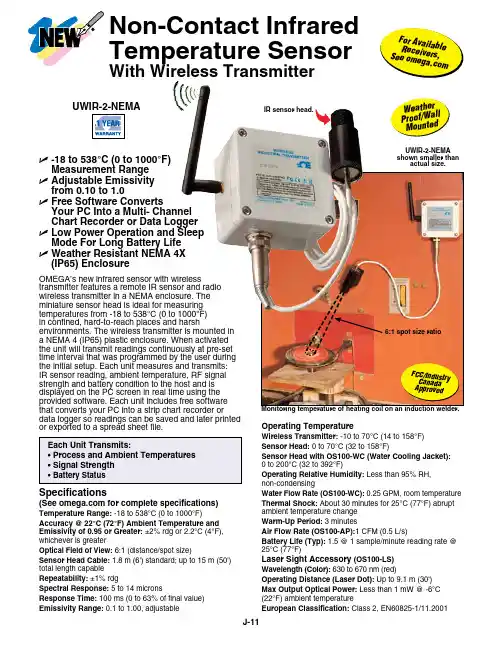
OMEGA’s new infrared sensor with wirelesstransmitter features a remote IR sensor and radio wireless transmitter in a NEMA enclosure. The miniature sensor head is ideal for measuring temperatures from -18 to 538°C (0 to 1000°F) in confined, hard-to-reach places and harshenvironments. The wireless transmitter is mounted in a NEMA 4 (IP65) plastic enclosure. When activated the unit will transmit readings continuously at pre-set time interval that was programmed by the user during the initial setup. Each unit measures and transmits: IR sensor reading, ambient temperature, RF signal strength and battery condition to the host and is displayed on the PC screen in real time using the provided software. Each unit includes free software that converts your PC into a strip chart recorder ordata logger so readings can be saved and later printed or exported to a spread sheet file.Operating TemperatureWireless Transmitter: -10 to 70°C (14 to 158°F)Sensor Head: 0 to 70°C (32 to 158°F)Sensor Head with OS100-WC (Water Cooling Jacket): 0 to 200°C (32 to 392°F)Operating Relative Humidity: Less than 95% RH, non-condensingWater Flow Rate (OS100-WC): 0.25 GPM, room temperature Thermal Shock: About 30 minutes for 25°C (77°F) abrupt ambient temperature change Warm-Up Period: 3 minutesAir Flow Rate (OS100-AP):1 CFM (0.5 L/s)Battery Life (Typ): 1.5 @ 1 sample/minute reading rate @ 25°C (77°F)Laser Sight Accessory (OS100-LS)Wavelength (Color): 630 to 670 nm (red)Operating Distance (Laser Dot): Up to 9.1 m (30')Max Output Optical Power: Less than 1 mW @ -6°C (22°F) ambient temperatureEuropean Classification: Class 2, EN60825-1/11.2001Specifications(See for complete specifications)Temperature Range: -18 to 538°C (0 to 1000°F)Accuracy @ 22°C (72°F) Ambient Temperature and Emissivity of 0.95 or Greater: ±2% rdg or 2.2°C (4°F), whichever is greaterOptical Field of View: 6:1 (distance/spot size)Sensor Head Cable: 1.8 m (6') standard; up to 15 m (50') total length capable Repeatability: ±1% rdgSpectral Response: 5 to 14 micronsResponse Time: 100 ms (0 to 63% of final value)Emissivity Range: 0.1 to 1.00, adjustableU -18 to 538°C (0 to 1000°F) Measurement Range U A djustable Emissivity from 0.10 to 1.0U F ree Software ConvertsYour PC Into a Multi- Channel Chart Recorder or Data Logger U L ow Power Operation and Sleep Mode For Long Battery Life U W eather Resistant NEMA 4X (IP65) EnclosureF C C /I n d u str y C a n a d a A p p r o v e dF o r A v ai l a b l e R e c e i v er s , S e e o me g a .c o mUWIR-2-NEMA shown smaller thanactual size.IR sensor head.W e a t h e rP r o o f /W al lM o u n t ed Non-Contact Infrared Temperature SensorWith Wireless Transmitter6:1 spot size ratioOS100-AP air purge collar to keep the lens free of particles or debris.Both shown smallerthan actual size.Maximum Operating Current: 45 mA @ 3 VdcFDA Classification: Complies with 21 CFR 1040.10, Class II laser product Beam Diameter: 5 mm (0.20")Beam Divergence: <2 mradOperating Temperature: 0 to 50°C (32 to 122°F)Operating Relative Humidity: Less than 95% RH, non-condensingbattery assembly.Ordering Examples: UWIR-2-NEMA, wireless infrared transmitter, UWTC-REC1, 48-channel USB receiver, UWTC-BATT-C, spare battery, and OS100-MB, sensor head bracket.UWIR-2-NEMA, wireless infrared transmitter, UWTC-REC2-D-MA, 48-channel transceiver/host with 1-channel 4 to 20 mA analog output, alarm and local display, UWTC-BATT-C, spare battery, and OS100-MB, sensor head bracket. OCW-3, OMEGACARE SM extends standard 1-yearwarranty to a total of 4 years.Power:(1.5 x 2")LASER RADIATION - DO NOT STARE INTO BEAM CAUTIONTYPE AND RULES PRINT BLACK 100%BACKGROUND YELLOW 100%Shown actual size.OS100-LS laser sight fits in front of the IR head for accurate positioning.。
e-mail:**************For latest product manuals:Shop online atUser’s Guidey = mx+bA Guide to Calibration and Unit ConversionOMB-457-0949 rev 1.0System Calibration & Engineering Units Conversion Using mx + b In many data acquisition software programs, the mx + b application is a powerful tool, which can be used to adjust displayed readings and/or values obtained from stored data. Using this software computational feature, it is possible to convert voltage readings to any more useful or appropriate engineering units, and simultaneously accomplish channel calibration to reduce or eliminate offset and gain errors. The following examples demonstrate how either or both objectives are accomplished for:•Engineering Units Conversion (1 example)•System Channel Calibration (2 examples)•Combined System Channel Calibration and Engineering Units Conversion (1 example) Engineering Units ConversionA pressure transducer with a 0-600 psi range has a 4-20mA output and is connected in a closed loop to drop 1-5 volts across a 250-ohm resistor. The theoretical nameplate relationship establishes that 1 V = 0 psi and 5 volts = 600 psi.A units conversion equation can be written in the following form:Desired Reading = m(Available Reading) + bWrite a pair of equations, representing the two known points.0 = m(1) + b (1)600 = m(5) + b (2)Solve for m by multiplying equation (1) by -1 and adding to equation (2).0 = m(1) - b600 = m(5) + b600 = m(5 - 1) (3)m = 600/(5 - 1) (4)m = 150Substitute the value for m into equation (1) to determine the value for b.0 = 150(1) + b (5)b = -150Write the correction equation using the previously determined values for m and b.Desired Reading in psi = 150(Available Reading in volts) - 150Check the result with the two original voltage readings.Correct Reading for 600 = 150(5) - 150= 600.00Correct Reading for 0 = 150(1) - 150= 0.00Any readings in the region between these two points provide the proportional psi reading as provided by the transducer.y = mx + b September 2002457-0949, rev 1.0 - 1 -System Channel Calibration(Example 1 of 2)A DBK9 and a DaqBook are connected to a precision 100.0 ohm resistor and read 0.2 °C; However, in this instance we know that 0.0 °C is the correct value. When connected to a 350.1 ohm resistor, the channel reads 719 °C. In this second instance we know that 716 °C is the correct value. From these two “points,” a correction [or calibration] equation can be derived. The equation has the mx + b form of:Correct Reading = m(Erroneous Reading) + bWrite a pair of equations, representing the two known points.0 = m(0.2) + b (1)716 = m(719) + b (2)Solve for m by multiplying equation (1) by -1 and adding to equation (2).0 = m(-0.2) - b716 = m(719) + b716 = m(719 - 0.2) (3)m = 716/(719 - 0.2) (4)m = 0.9961Substitute the value for m into equation (1) to determine the value for b.0 = 0.9961(0.2) + b (5)b = -0.1992Write the correction equation using the previously determined values for m and b.Correct Reading = 0.9961(Erroneous Reading) - 0.1992Check the result with the two original erroneous values.Correct Reading for 716 = 0.9961(719) - 0.1992= 715.99Correct Reading for 0 = 0.9961(0.2) - 0.1992= 0.00002Any readings in the region of these two points should be much more accurate after being adjusted by the correction equation. -2- 457-0949, rev 1.0September 2002y = mx + bSystem Channel Calibration(Example 2 of 2)A DBK8 and a DaqBook are configured for a 50 volt range. Shorting the inputs together delivers a reading of 0.022 volts and applying a DC calibrator set at 47.5 volts produces a reading of 48.3 volts. From these two “points” a correction or calibration equation can be derived which has the form:Correct Reading = m(Erroneous Reading) + bWrite a pair of equations, representing the two known points.0 = m(0.022) + b (1)47.5 = m(48.3) + b (2)Solve for m by multiplying equation (1) by -1 and adding to equation (2).0 = m(-0.022) - b47.5= m(48.3) + b47.5 = m(48.3 - 0.022) (3)m = 47.5/(48.3 - 0.022) (4)m = 0.9839Substitute the value for m into equation (1) to determine the value for b.0 = 0.9839(0.022) + b (5)b = -0.0216Write the correction equation using the previously determined values for m and b.Correct Reading = 0.9839(Erroneous Reading) - 0.0216Check the result with the two original erroneous values.Correct Reading for 47.5 = 0.9839(48.3) - 0.0216= 47.501Correct Reading for 0 = 0.9839(0.022) - 0.0216= 0.00004Any readings in the region of these two points should be much more accurate after being adjusted by the correction equation. y = mx + b09-13-023Combined System Channel Calibration and Engineering Units Conversion A DBK15 and a DaqBook are connected to a string pot to measure the open position of a vertical bay door. When the door is closed, the voltage reading given by the DaqBook is 0.175 volts. When the door is raised to a height of 12 feet, the voltage reading provided by the DaqBook is 4.572 volts. From these two “points” a correction [or calibration] equation can be derived which has the form:Correct Reading = m(Erroneous Reading) + bWrite a pair of equations, representing the two known points.0 = m(0.175) + b (1)12 = m(4.572) + b (2)Solve for m by multiplying equation (1) by -1 and adding to equation (2).0 = m(-0.175) - b12 = m(4.572) + b12 = m(4.572 - 0.175) (3)m = 12/(4.572 - 0.175) (4)m = 2.729Substitute the value for m into equation (1) to determine the value for b.0 = 2.729 (0.175) + b (5)b = -0.478Write the correction equation using the previously determined values for m and b.Correct Reading = 2.729(Erroneous Reading) - 0.478Check the result with the two original erroneous values.Correct Reading for 12 = 2.729(4.572) - 0.478= 12.00Correct Reading for 0 = 2.729(0.175) - 0.478= 0.00Any readings in the region of these two points should be much more accurate after being adjusted by the correction equation. -4- 457-0949, rev 1.0September 2002y = mx + bWARRANTY/DISCLAIMEROMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month grace period to the normal one (1) year product warranty to cover handling and shipping time. This ensures that OMEGA’s customers receive maximum coverage on each product.If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service Department will issue an Authorized Return (AR) number immediately upon phone or written request. Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no charge. OMEGA’s WARRANTY does not apply to defects resulting from any action of the purchaser, including but not limited to mishandling, improper interfacing, operation outside of design limits, improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of having been tampered with or shows evidence of having been damaged as a result of excessive corrosion; or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating conditions outside of OMEGA’s control. Components in which wear is not warranted, include but are not limited to contact points, fuses, and triacs.OMEGA is pleased to offer suggestions on the use of its various products. However, OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any damages that result from the use of its products in accordance with information provided by OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by the company will be as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESSED OR IMPLIED, EXCEPT THAT OF TITLE, AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF LIABILITY: The remedies of purchaser set forth herein are exclusive, and the total liability of OMEGA with respect to this order, whether based on contract, warranty, negligence, indemnification, strict liability or otherwise, shall not exceed the purchase price of the component upon which liability is based. In no event shall OMEGA be liable for consequential, incidental or special damages.CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic Component” under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical applications or used on humans. Should any Product(s) be used in or with any nuclear installation or activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility as set forth in our basic WARRANTY/DISCLAIMER language, and, additionally, purchaser will indemnify OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the Product(s) in such a manner.RETURN REQUESTS/INQUIRIESDirect all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN AUTHORIZED RETURN (AR) NUMBER FROM OMEGA’S CUSTOMER SERVICE DEPARTMENT (IN ORDER TO AVOID PROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return package and on any correspondence.The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent breakage in transit.FOR WARRANTY RETURNS, please have the following information available BEFORE contacting OMEGA:1.Purchase Order number under which the productwas PURCHASED,2.Model and serial number of the product underwarranty, and3.Repair instructions and/or specific problemsrelative to the product.FOR NON-WARRANTY REPAIRS,consult OMEGA for current repair charges. Have the following information available BEFORE contacting OMEGA: 1. Purchase Order number to cover the COSTof the repair,2.Model and serial number of the product, and3.Repair instructions and/or specific problemsrelative to the product.OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords our customers the latest in technology and engineering.OMEGA is a registered trademark of OMEGA ENGINEERING, INC.© Copyright 2006OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the prior written consent of OMEGA ENGINEERING, INC.Where Do I Find Everything I Need for Process Measurement and Control?OMEGA…Of Course!Shop online at TEMPERATUREⅪߜThermocouple, RTD & Thermistor Probes, Connectors, Panels & AssembliesⅪߜWire: Thermocouple, RTD & ThermistorⅪߜCalibrators & Ice Point ReferencesⅪߜRecorders, Controllers & Process MonitorsⅪߜInfrared PyrometersPRESSURE, STRAIN AND FORCEⅪߜTransducers & Strain GagesⅪߜLoad Cells & Pressure GagesⅪߜDisplacement TransducersⅪߜInstrumentation & AccessoriesFLOW/LEVELⅪߜRotameters, Gas Mass Flowmeters & Flow ComputersⅪߜAir Velocity IndicatorsⅪߜTurbine/Paddlewheel SystemsⅪߜTotalizers & Batch ControllerspH/CONDUCTIVITYⅪߜpH Electrodes, Testers & AccessoriesⅪߜBenchtop/Laboratory MetersⅪߜControllers, Calibrators, Simulators & PumpsⅪߜIndustrial pH & Conductivity EquipmentDATA ACQUISITIONⅪߜData Acquisition & Engineering SoftwareⅪߜCommunications-Based Acquisition SystemsⅪߜPlug-in Cards for Apple, IBM & CompatiblesⅪߜDatalogging SystemsⅪߜRecorders, Printers & PlottersHEATERSⅪߜHeating CableⅪߜCartridge & Strip HeatersⅪߜImmersion & Band HeatersⅪߜFlexible HeatersⅪߜLaboratory HeatersENVIRONMENTALMONITORING AND CONTROLⅪߜMetering & Control InstrumentationⅪߜRefractometersⅪߜPumps & TubingⅪߜAir, Soil & Water MonitorsⅪߜIndustrial Water & Wastewater TreatmentⅪߜpH, Conductivity & Dissolved Oxygen InstrumentsM4347/0606。
如何确定我购买的是正宗欧米茄腕表?遵循如下步骤可以确定您购买的是正宗欧米茄腕表:- 只在欧米茄指定经销商处购买欧米茄腕表。
- 申请一张信用卡大小的保修卡,完整填写8位系列编号、手表编号以及经销商的完整姓名和地址。
- 如果您想确定腕表是否正宗,请携同欧米茄腕表及保修卡到指定的维修中心,让我们的维修服务员确定您购买的是否为正宗欧米茄腕表。
客户服务网络返回页首计时表(CHRONOGRAPH)与瑞士官方天文台认证腕表(CHRONOMETER)有何区别?计时表(CHRONOGRAPH)带有显示时、分和秒的指针,它们与机械系统一起透过中央计时指针测定逝去时间,可以记录到秒,并且具有30分钟和12小时定时装置。
瑞士官方天文台认证腕表(CHRONOMETER)是以不同角度,成功通过温度、精确度和防水功能测试后,获得COSC(瑞士官方天文台)正式颁发的等级证书的腕表。
通过这些测试至少需要15天时间。
返回页首计时腕表上的按钮具有什么功能?位于2点钟位置的按钮可以启动或停止计时功能,位于4点钟位置的按钮用于重新计时。
返回页首海马系列专业计时腕表的排氦气阀门具有什么功能?排氦气阀门由欧米茄为职业潜水员专门研发。
在深海潜水过程中,潜水员往往会在潜水钟内进行数天作业。
在到达水平面之前,潜水钟内充满氦气和氧气的混合气体。
氦气分子轻于空气,可以渗入手表,并在大气压力的作用下将水晶镜面推出。
在到达水平面之前打开氦气排放阀可以将氦气排放,从而防止手表进水。
返回页首自动上链机芯与手动上链机芯有何区别?自动上链机芯与手动上链机芯的区别在于上链方式的不同。
手动上链腕表需要每天人工上链,而自动上链腕表则具有内部摩打,利用手腕的运动来自动上链。
自动上链腕表通常具有至少40小时的动力储存,即使不佩戴手表,仍然能够备有足够的能量储存以保持稳定的运行。
返回页首欧米茄腕表是否具有防振功能?是。
欧米茄腕表可以承受重量为5000克的振动。
返回页首欧米茄腕表是否具有防磁性能?是。
Omega学习手册Omega学习手册 0前言 (9)第一章陆地观测系统定义 (10)1.0 技术讨论 (10)1.1 模块简介 (10)1.2 Database and Line Information 观测系统和测线信息 (15)1.3 Geometry Database Creation 观测系统数据库创建 (15)1.4 Primary and Secondary Data Tables (16)1.5 Pattern Specifications (16)1.6 Field Statics Corractions (16)1.7 Trace Editing 道编辑 (19)第二章静校正 (24)第一节2-D 折射静校正(EGRM) (24)1.0 技术讨论 (24)1.1 简介 (24)1.2 第一步——对拾取值进行处理 (25)1.3 第二阶段---建立折射模型 (37)1.4 第3步——计算静校正 (46)1.5 特别选件 (49)1.6 海洋资料处理要考虑的因素 (53)1.7 控制手段 (53)参考文献: (63)3.0 道头总汇: (63)第二节三维折射波静校正 (64)1.0 技术讨论 (64)2.0 二维与三维折射静校正方法 (64)1.2 折射静校正计算原理 (65)1.3 初始值的给定 (67)1.4 最小二乘法延迟时的计算 (67)1.5 iterations (75)1.6 Diving Waves (81)1.7 建立折射模型 (84)1.8 uphole options (86)1.9 water uphole corrections (87)1.10 用井口信息修正风化层速度 (88)1.11 静校正量的计算 (89)1.12 地表基准面和剩余折射静校正 (90)1.13 定义偏移距范围 (91)1.14 定义速度 (91)1.15 延迟时控制 (92)1.16 观测系统、辅助观测系统和一些道头字的输入要求 (92)1.17 输出的库文件和道头字 (96)第三节反射波剩余静校正(miser) (97)2.0 地表一致性剩余静校正 (98)3.0 非地表一致性静校正 (102)第四节反射波最大叠加能量静校正计算 (103)1.0 模块简介: (104)2.0 应用流程: (105)3.0 分子动力模拟法的理论基础: (106)4.0 模块中参数的设计 (106)5.0 应用实例及效果分析 (110)第五节波动方程基准面校正 (113)1.0 技术讨论 (113)1.1 理论基础 (115)1.2 波动方程层替换的应用 (117)1.4 模块算法 (118)1.5 应用的方法 (120)第三章地表一致性振幅补偿 (127)第一节地表一致性振幅补偿–拾取(1) (127)1.0 技术讨论 (127)1.1 概况 (127)1.2 地表一致性振幅补偿流程 (128)1.3 振幅统计 (128)1.4 预处理/道编辑 (129)1.5 自动道删除 (129)1.6 模块输出 (130)1.7 分析时窗 (130)2.0 道头字总结 (131)3.0 参数设置概要 (131)4.0 参数设置 (131)4.3 Amplitude Reject Limits (132)第二节地表一致性振幅补偿–分解(2) (133)目录 (133)一、技术讨论 (134)二、道头字总结 (148)三、参数设置概述 (148)四、参数设置(简) (148)第三节地表一致性振幅补偿–应用(3) (149)目录 (149)一、技术讨论 (150)1.1 背景 (150)1.2 SCAC处理过程的流程图 (150)1.2.1 HIDDEN SPOOLING (151)1.3 模块概论 (152)二、道头字总结 (152)三、参数设置概述 (152)五、参数设置(略) (153)5.1 General (153)5.2 SCAC Term Application (153)5.3 Printout Options (153)第四节剩余振幅分析与补偿 (153)1.0 技术讨论: (153)1.1 背景 (154)1.2 模块的输入和输出 (155)1.3 分析过程概述 (155)1.4 分析参数表 (159)1.5 设置网格范围 (164)1.6 分析用时间门参数设定 (166)1.7 时空域加权 (167)1.8 打印选项参数设置 (168)1 .9 应用过程综述 (168)1.10 应用参数设置 (171)1.11 应用时间门参数设置 (173)1.12 RAC函数的质量控制 (174)1.13 在振幅随偏移距变化(A VO)处理中的注意事项 (175)1.14 背景趋势推算 (176)2.0 道头字总结 (176)3.0 参数设置摘要 (176)4.0 设置参数 (176)4.1 Units (176)4.2 General (176)4.3 Analysis (177)Primary Auto Range: (180)Secondary Auto Range: (180)4.6 Primary Manual Range 用于划分面元的首排序范围确定(手动设置) (180)4.7 Secondary Auto Range:用于划分面元的次排序范围确定(手动设置)1804.8 Analysis Time Gates :分析时间门参数(可选) (181)4.9 Temporal Smoothing Weights at Top of Data (可选) (181)4.10 Temporal Smoothing Weights at Bottom of Data(可选) (181)4.11 Primary Spatial Smoothing Weights(可选) (182)4.12 Secondary Spatial Smoothing Weights(可选) (182)4.13 Application (182)4.14 Application Time Gates (183)5.0 参考流程 (183)第四章 (185)第一节瞬时增益 (185)1.0 技术讨论 (185)第二节指数函数增益 (188)1.1 背景 (188)1.2 梯度平滑 (189)2.0 道头总结 (191)3.0 参数设置概要 (191)4.0 参数设置 (191)4.1 General (191)5.0 应用实例 (192)第四章反褶积 (195)第一节地震子波处理(SWP)指导 (195)辅导班Tutorial (195)辅导班1 快速漫游(Quick Tour) (195)概要 (195)快速漫游: 基本训练 (195)辅导班2 –a 为信号反褶积准备一个子波 (203)辅导班2 –b 从野外信号中消除原始的仪器响应影响 (204)辅导班2–c 建立新的仪器响应和新的整形算子 (209)辅导班2– d 将滤波器保存到带通滤波作业文件中 (211)辅导班3用尖脉冲的逆做特征信号反褶积 (213)第二节子波转换应用指导 (215)子波训练 (215)第三节地表一致性反褶积分析 (218)地表一致性谱分解 (225)地表一致性反褶积算子设计 (249)反褶积算子的应用 (255)第四节谱分析 (273)第五节地表一致性反褶积分析 (297)第六节地表一致性谱分解 (302)第八节地表一致性反褶积算子设计 (320)第九节反褶积算子的应用 (325)第六章动校正 (345)第一节视各向异性动校正 (345)第七章各种理论方法简介 (355)第一节层速度反演方法简介 (355)1.1 层速度反演的几种方法 (355)1.1.1 相干反演 (356)1.1.2 旅行时反演 (357)1.1.3 叠加速度反演 (358)2.1 二维层速度反演 (359)2.1.1 相干反演计算的偏移距范围 (359)2.1.2 单个CMP位置超道集的选择 (359)2.1.3 相干反演中的互相关 (360)2.1.4 不确定值 (360)2.1.5 速度的横向变化 (360)3.1 三维层速度反演 (361)3.1.1 方位角范围 (361)3.1.2 相干反演 (362)3.1.3 叠加速度反演 (363)3.1.4 方位角 (364)3.1.5 DMO (364)3.1.6 射线追踪 (364)第二节射线偏移方法简介 (365)1.1 射线偏移 (365)1.2 向射线偏移与成像射线偏移 (367)第三节层位正演方法简介 (368)1.1 层位正演 (368)1.2 零偏移距正演 (369)1.3 成像射线追踪-从深度域到时间偏移域的零偏移距正演 (369)1.4 CMP射线追踪 (371)1.5 CRP正演 (371)1.6 3D正演 (372)1.7 速度正演 (372)1.8 浮动基准面与静校正的处理 (372)第四节扩展STOLT--FK 偏移 (373)概述 (373)1.0 技术讨论 (373)1.1 背景 (374)1.2 扩展STOLT算法 (374)1.3 扩展STOLT偏移的推荐参数 (376)1.4 截断速度和W因子 (377)1.5 框架速度(frame velocity) (378)1.6 速度的横向变化 (378)1.7 速度输入 (378)1.8 三维偏移 (379)1.9 反偏移 (379)1.10 反偏移到零偏移距的处理 (379)1.11 充零方式镶边 (380)1.12 边界处理 (380)1.13 频率内插 (381)1.14 随机波前衰减 (381)1.15 三维偏移中少道的情形 (381)1.16 时间内插 (381)第五节DMO 准备模块 (381)概述: (382)1.0 技术讨论: (382)1.1 理论基础 (382)1.2 递进叠加文件 (382)1.3 速度监控和非矩形网格 (383)1.4 倾角加权表 (383)1.5 统计分析 (383)1.6 层位属性分析 (384)1.7 位图化(Bitmapping) (384)1.8 均衡DMO (384)1.9 限定边界DMO (385)1.10 随意边界DMO (386)1.11 3D DMO Monitor (389)DMO 倾角校正 (390)(DMO X-T STACK)(2) (390)概述: (390)1.0 技术讨论 (390)1.1 简介 (390)1.2 递进叠加 (390)1.3 倾角时差校正(Dip Moveout)-DMO (391)1.4 处理类型 (392)1.5 DMO应用模式 (392)1.6 算子设计 (393)1.7 递进叠加文件 (393)1.8 固定边界和随意边界中的分片段叠加 (393)1.9 运行时间 (394)1.10 DMO处理流程 (394)DMO 输出模块 .............................................................................................................. - 396 - (DMO X-T OUT)(3)........................................................................................................ - 396 - 第八章多波多分量................................................................................................................ - 397 - 第一节多分量相互均衡.............................................................................................. - 397 -1.0 技术讨论......................................................................................................... - 397 -1.1 引言................................................................................................................. - 397 -1.2 数据的输入/输出............................................................................................ - 397 -1.3 背景介绍......................................................................................................... - 398 -1.4 原理................................................................................................................. - 398 -1.5 道头字集......................................................................................................... - 400 -1.6 三维实例......................................................................................................... - 401 -1.7 操作指南......................................................................................................... - 404 -第二节S波两分量旋转合成....................................................................................... - 408 -1.1 引言................................................................................................................. - 408 -1.2 背景介绍......................................................................................................... - 409 -1.3 输入数据......................................................................................................... - 410 -1.4 旋转的应用..................................................................................................... - 412 -1.5 测算水平方向................................................................................................. - 416 -第三节转换波速度比(Vp/Vs)计算 ..................................................................... - 417 -1.0 技术讨论......................................................................................................... - 418 -1.1 引言................................................................................................................. - 418 -1.2 输入速度和Vp/Vs文件 ................................................................................ - 418 -1.3 输出速度和Vp/Vs文件 ................................................................................ - 420 -1.4 有效Vp/Vs比值计算 .................................................................................... - 420 -1.5 S波速度计算(Vs) .......................................................................................... - 421 -1.6 平均Vp/Vs比值计算 .................................................................................... - 424 -第四节共转换点计算(CCP_BIN) ............................................................................. - 424 -1.0 技术简介......................................................................................................... - 425 -1.1 基础原理......................................................................................................... - 425 -1.2 更新道头字..................................................................................................... - 427 -1.3 输入速度和Vp/Vs比率文件 ........................................................................ - 427 -1.4 共转换点的计算方法..................................................................................... - 428 -1.5 时窗................................................................................................................. - 430 -1.6 操作指导......................................................................................................... - 431 -1.7 有关提高运行效率的指导............................................................................. - 433 - 第九章模型建立.................................................................................................................. - 435 - 第一节地震岩性模型建立.......................................................................................... - 435 -1.0 技术讨论......................................................................................................... - 435 -SLIM处理 ............................................................................................................... - 435 -1.2 概述................................................................................................................. - 436 -1.3 SLIM模型研究 .............................................................................................. - 437 -1.4 输入层的细分................................................................................................. - 441 -第二节地震岩性模拟属性分析.............................................................................. - 442 -1. 0 技术讨论........................................................................................................ - 442 -1.1 地震模拟模型处理......................................................................................... - 442 -1.2 概要............................................................................................................... - 442 -1.3 地震记录输入................................................................................................. - 443 -1.4 合成地震记录剖面图..................................................................................... - 443 -1.5 地球物理属性................................................................................................. - 444 -1.6 测井记录数据................................................................................................. - 445 -1.7 显示................................................................................................................. - 445 -第三节地震正演模拟模型生成................................................................................ - 445 -1.0 技术讨论......................................................................................................... - 445 -1.1 地震正演模拟模型处理................................................................................. - 446 -1.2 概要................................................................................................................. - 446 -1.3 SLIM模型讨论 .............................................................................................. - 446 -1.4 输入层的细分................................................................................................. - 450 -1.5 井记录............................................................................................................. - 451 -1.6 密度是速度的函数......................................................................................... - 451 - 第四节地震岩性模型优化.......................................................................................... - 453 - 技术讨论.................................................................................................................. - 453 -1.1 地震岩性模拟过程......................................................................................... - 453 -1.2 概要................................................................................................................. - 453 -1.3 问题的公式化................................................................................................. - 453 -1.4 计算方法......................................................................................................... - 455 -1.5 影响区域......................................................................................................... - 462 - 第五节地震岩性模拟控制点定义.............................................................................. - 464 -1.0 技术讨论......................................................................................................... - 464 -1.1 概要................................................................................................................. - 464 -1.2 二维控制点组................................................................................................. - 465 -1.3 三维控制点组................................................................................................. - 467 -前言自西方地球物理公司Omega处理系统引进以来,通过我院处理人员的不断开发,目前已成为西北分院的主力处理系统。
CN32Pt, CN16Pt, CN16PtD, CN8Pt, CN8PtDDP32Pt, DP16Pt, DP8PtDasyLAB MODBUS InterfacePLATINUM TM Series User’s GuideThe information contained in this document is believed to be correct, but OMEGA accepts no liability for any errors it contains, and reserves the right to alter specifications without notice.Omega Engineering | Table of Contents1Introduction (2)1.1Purpose (2)1.2Definition of Terms and Acronyms (2)1.3Applicable Documents (3)2Modbus Interface (4)2.1Modbus Functions (4)2.2Data Formats (4)2.2.1Multiple Register Reads (4)2.2.2Multiple Register Writes (5)2.2.3Request Packet Sizes (5)2.2.4Modbus USB Support (6)3Platinum Modbus Register Assignments (7)3.1DasyLab Platinum Modbus Registers (7)3.2DasyLab Platinum Modbus Register Access (8)3.3Example (9)3.3.1Serial inteface (9)3.3.2TCP/IP Interface (11)1 Introduction1.1 PurposeThe following document defines the Modbus protocol support and register mapping used by the Platinum product allowing interfacing to the DasyLab Modbus interface software.The Modbus interface is available on all communication channels and support is provided for MODBUS/ASCII, MODBUS/RTU and MODBUS/TCP/IP transactions.1.2 Definition of Terms and AcronymsI2C 2 wire serial interfaceBase Device Device connected to slave deviceSmart Input Device supporting 1 or more Input sensorsSmart Output Device supporting 1 or more Output ElementsSensor Element One of the physical sensing elements on a Smart OutputAC Alternating CurrentDC Direct CurrentCS Chip SelectADC Analog to Digital ConverterDAC Digital to Analog ConverterRS485 Electrical signals used for serial communicationsRS232 Electrical signals used for serial communicationsCSV Comma Separated ValuesCOTS Commercially-Off-The-ShelfESD Electo Static DischargeFW FirmwareHW HardwareI/O Input/OutputLED Light Emitting DiodeHexadecimal Values expressed using base 16 (24)1.3 Applicable DocumentsDoc. # Name / Description Rev. #Platinum Modbus Interface Reference 1.0Platinum Load and Save File Format 0.0.1Platinum Ramp and Soak Processing0.0.1MODBUS APPLICATION PROTOCOL SPECIFICATIONV1.1b3Device Serialization and Version Information Rev 0.1Omega Engineering Coding Standard Rev 1.2.02 Modbus InterfaceThe Modbus interface is fully described in MODBUS APPLICATION PROTOCOL SPECIFICATION (V1.1b3).The Modbus specification allows accessing to up 65535 internal ‘holding’ registers using register READ, register WRITE and WRITE MULTIPLE commands. Each Modbus holding register is defined as a 16 bit entity structured as BIG ENDIAN values (most significant byte always presented first).The Platinum Modbus interface provides access to the internal database of the Platinum product family by internally mapping Modbus holding registers to specific database items.Modbus is structured using a MASTER-SLAVE topology, in which there is one MASTER device and up to 255 slave devices. All transactions are initiated by the MASTER device.Modbus slave devices are individually accessed using a one byte SLAVE address. The MASTER device initiates a transaction by sending a request packet to a specific slave. The SLAVE device processes the transaction and returns either response packet indicating success or failure.Address 0 is reserved as a ‘broadcast’ address, in which all slave devices will accept and process the transaction but will not send a response.2.1 Modbus FunctionsThe Platinum Modbus interface supports the following Modbus FUNCTION requests.Mnemonic DescriptionFunctionCode0x03 Read Holding Register Reads one or more consecutive 16 bit holding registers 0x06 Write Single Register Writes a specific 16 bit holding register0x07 Read Exception status Reads structured status information0x08 Diagnostic Read/Write diagnostic information0x10 Write Multiple Registers Write one or more consecutive 16 bit holding registers 0x0b Get Comm events Read communication event counters2.2 Data FormatsModbus holding registers are represented as 16 bit entities. The following encoding is used forextended data items. Note that ‘byte 0’ will be the first byte received/transmitted.For data types that can be represented in 16 bit (Boolean, byte, char, int16 and uint16) a single register is used.For data types that require 32 bits two consecutive registers are used. The lower number register will represent the most significant data. The 2nd register represents the leas significant data.2.2.1 Multiple Register ReadsWhen reading a dual register entity the lower order register should be used as the requested ‘holdiing register’, with a request for a minimum of 2 registers. Internally the entire entity is read and data is then built into a response packet.The access can be split into 2 consecutive single register reads. When the lower (base) register is accessed the entire 32 bit entity is read and the two most significant bytes are returned. The following single register read must specify the next consecutive register address. The two least significant bytes of the internally buffered data used in the response.Attempts to access the two least significant bytes without first reading the two most significant bytes will result in an error response.2.2.2 Multiple Register WritesWhen writing a dual register entity the lower order register should be used as the requested ‘holdiing register’, with a request for minimum of 2 registers. The write data is internally buffered andtransferred to the database entry as a 32 bit value.The access can be split into 2 consecutive single register writes. When the lower (base) register is written the 16 bit entity is internally buffered BUT NO DATA TRANSFER IS MADE TO THEDATABASE. The following single register write must specify the next consecutive register address.The two least significant bytes of the write request are combined with the previous write data and the entire 32 bit entity is written to the database.Attempts to write the two least significant bytes without first writing the two most significant bytes will result in an error response.Data Types NumberofRegistersByte Description0 1 2 3Boolean 1 -- LSBN/A Zero = OFF, non-zero = ONByte, Char 1 -- LSB Entity contained in LSB of register,Byte 0 ignored.Int16, uint16 1 MSB LSB Entity contained in MSB/LSB ofregister.0 1 2 3 (dual register data)Int32, uint32 2 MSB B-1 B-2 LSB Requires 2 consecutive registers,MSB transferred firstfloat 2 Sign+Exp MantisaMSBB-1 MantisaLSBIEEE formatted value contained in 2consecutive register2.2.3 Request Packet SizesMultiple consecutive registers may be accessed in a single transaction.The Platinum Modbus interface imposes a maximum of 64 bytes for the total transaction. Allowing for the required framing, addressing and integrity checks results in the following data size restrictions using the READ and WRITE MULTIPLE functions.Format Protocol Overhead Maximum Read data Maximum Write dataASCII 16 12 Registers 12 RegistersRTU 8 23 Registers 23 RegistersTCP/IP 8 23 Registers 23 Registers2.2.4 Modbus USB SupportThe Modbus specification supports RS232 and RS485 serial data. For ASCII formatted packets a USB virtual comm channel provides full support since the framing information is specified by unique characters (SOF = ‘:’, EOF = CR/LF).For RTU formatted packets the Modbus requires specific inter-frame character timing to determine the framing of each transaction. This information is not available using a generic virtual commchannel across USB, which will typically collect ‘serial’ data into 64 byte packets for transmission, as determined by the USB end-point buffer size. The USB Modbus RTU interface relies on the USB channel collecting data into 64 byte packets.3 Platinum Modbus Register AssignmentsAll accesses to the Platinum database information are made through the Modbus registers.Mnemonic entries marked with ‘*’ are identical to those used by the Platinum LOAD and SAVE file formats.Mnemonic entries marked with ‘**’ are identical to those used by the Platinum LOAD and SAVE file formats but are referenced in LOAD and FILE data are made using meta characters (%).Data types are:R – single 16 bit register (may be Boolean, byte, char, int16 or uint16 data)L – dual (32 bit) register (may be int32 or uint32 data)F – IEEE Floating point valueAll data is transferred using BIG ENDIAN formatting, where the most significant byte is transmitted first.3.1 DasyLab Platinum Modbus RegistersThe following is an abbreviated list of the more common registers within a Platinum controller. Refer to the Platinum Modbus Interface document for a complete list.Index Mnemonic Type Description512 0x0200 DEVICE_ID** L Device Identifier514 0x0202 VERSION_NUMBER** L Device Version number (Hex Value)516 0x0204 SYSTEM_STATUS L Enumerated Status value528 0x0210 CURRENT_INPUT_VALUE F Measured process input value532 0x0214 REMOTE_SETPOINT_VALUE F Measured auxiliary input value542 0x021e INPUT_DIGITAL R State of digital input pin544 0x0220 CURRENT_SETPOINT_1 F Current value of Setpoint 1546 0x0222 CURRENT_SETPOINT_2 F Current value of Setpoint 2548 0x0224 CONTROL_SETPOINT F Setpoint used in PID calculations550 0x0226 PEAK_VALUE F Maximum Value processed552 0x0228 VALLEY_VALUE F Minimum Value processed554 0x022a PID_OUTPUT F PID Output level (0..100%)556 0x022c CURRENT_INPUT_VALID R Flag indicating process value is valid557 0x022d ALARM_STATE R558 0x022e RAMP_SOAK_STATE R Enumerated value - R&S state560 0x0230 OUTPUT_1_STATE R Flag indicating state of Output (0/1)561 0x0231 OUTPUT_2_STATE R Flag indicating state of Output (0/1)562 0x0232 OUTPUT_3_STATE R Flag indicating state of Output (0/1)563 0x0233 OUTPUT_4_STATE R Flag indicating state of Output (0/1)564 0x0234 OUTPUT_5_STATE R Flag indicating state of Output (0/1)565 0x0235 OUTPUT_6_STATE R Flag indicating state of Output (0/1)566 0x0236 OUTPUT_7_STATE R Flag indicating state of Output (0/1)567 0x0237 OUTPUT_8_STATE R Flag indicating state of Output (0/1)Control Functions576 0x0240 RUN_MODE R Enumerated value – system running state 578 0x0242 LATCH_RESET R Write 1 to reset latched alarmsAlarm Configuration1280 0x0500 ALARM_1_STATE R Alarm state (Bit 0)1312 0x0520 ALARM_2_STATE RExcitation Voltage1472 0x05c0 EXCITATION_VOLTAGE* R Enumerated Excitation VoltageAnnunciators1504 0x05e0 DB_ANNUNCIATOR_1_STATE R Enumerated Annunciator State1508 0x05e4 DB_ANNUNCIATOR_2_STATE R Enumerated Annunciator State3.2 DasyLab Platinum Modbus Register AccessThe following specifications have been verified with DasyLab version 13. Refer to DasyLab specific documentation for further details.The DasyLab software package allows the integration of Modbus compatible equipment through the Modbus Input/Output Module. All Platinum registers are treated as Analog INPUT or Analog OUTPUT values. Use Modbus Analog Input module to request data from Platinum and use Modbus Analog Output module to send data to Platinum.DasyLab supports Modbus RTU (serial) and Modbus TCP/IP (Ethernet). The Platinum controller supports Modbus RTU on the USB interface, the RS232/RS485 interface (if installed) and Modbus TCP/IP on the Ethernet interface (if installed). For the serial channel and USB connections the correct COM channel must be selected and for serial channels the appropriate INTERFACE parameters must be chosen. The Platinum unit must have its corresponding COM parameters set accordingly.If using serial interface, DASYLab assumes the function of the master which sends commands to the measurement devices or slaves. If using TCP/IP interface, DASYLab assumes the function of the client which requests data from the server.3.3 Example3.3.1 Serial interfaceIn the example shown, the Platinum controller has been connected using a USB cable and appears as ‘Virtual COM Port’ 256 within the Windows environment. For USB connections the serial interface parameters are ignored. The Platinum /INIT/COMM/USB/PROT (front panel access menu) has been set to MODBUS/RTU.The Register Starts at 0 option should be checked. The ‘30’ Pull Down option may be ignored. All values are accessed using BIG ENDIAN format and the ‘swap word order’ option should remain unchecked.When a Modbus Input/Output module is placed it is necessary to link the associated values with the correct Platinum Modbus registers. DasyLab requires that register values are entered as decimal values.The following example shows how Modbus Analog Input module can be configured.On Analog Input Channel 0, the channel is named as Process Value with Celsius temperature unit.The register index is 528 (Register starts at 0) and the Register data type is Float (32 bit). The Device Address is 0x01.On Analog Input Channel 1 and 2 (not shown), Peak Value and Valley Value are configured with the matching Register index and Data type that can be found in Platinum Series User Manual -Modbus Interface document.To quickly test communication to Platinum controller with Modbus Analog Input module, click on “Test” and the data returned from the device is displayed in “Scaled data” as shown in the screenshot below.Once the Modbus Analog Input module is configured, it can then be connected to Display modules such as Digital display or Chart Recorder module which can be found in Display category.3.3.2 TCP/IP InterfaceIn this example, Modbus communication to Platinum is through TCP/IP interface. The TCP communication protocol needs to be changed to ModbusTCP. This setting can be found on Communication page/Network Connection Configuration section. The default device IP address of Platinum’s TCP/IP interface is 192.168.1.200 and the default Modbus Local Port is 502.Platinum Ethernet communication protocol also needs to be changed to Modbus/RTU. This setting is accessible through the front panel menu /INIT/COMM/ETHN/PROT.The setup procedure for DasyLab Modbus over TCP/TIP is similar to DasyLab Modbus Serial. The following screenshot illustrates a typical configuration.M5548/1215。

***********************Servicing North America:U.S.A. Omega Engineering, Inc.Headquarters: Toll-Free: 1-800-826-6342 (USA & Canada only)Customer Service: 1-800-622-2378 (USA & Canada only)Engineering Service: 1-800-872-9436 (USA & Canada only)Tel: (203) 359-1660 Fax: (203) 359-7700e-mail:**************For Other Locations Visit /worldwideThe information contained in this document is believed to be correct, but OMEGA accepts no liability for any errors it contains, and reserves the right to alter specifications without notice.CONTENTS1. Introduction (1)1.1 Specification (1)1.2 ModelNumber (2)2. Operation (2)2.1 Principle (3)2.2 Precautions (4)3. Installation (5)Piping (5)3.1 General3.2 Strainers/Filters (7)and Installation Kits (7)Straighteners3.3 Flow4. Maintenance (8)4.1 General (8)Procedures (8)4.2 Cleaning4.2.1 Chemical Cleaning (8)Cleaning (8)4.2.2 Steam4.3 PickupCoil Testing (10)Shooting (11)4.4 TroubleAppendix A: DrawingTypical Assembly Sanitary Flowmeter with Installation Kit (12)1.IntroductionThe following information is provided for the proper installation and maintenance of your instrument.1.1 SpecificationsLinearity: ± 0.5% of reading over linear flow rangeRepeatability:± 0.1% of readingFlow Range: 0.35 to 650 gpmTemperature Range: -450 °F to +450 °F w/ Standard MAG coilSignal Output: 10 mVrms or greater into 10K ohm load at minimum flow rate.Materials of Construction: 316/316L Dual Rated Stainless Steel Rotor 17.4 PH SSRetaining Ring 15.7 MO PH SSBearings: Hard Carbon Composite Surface Finish: 32 micro inch finish End Fitting: Tri-Grip® Sanitary Type-1-1.2 Model NumberLinear FlowRangeWater Model No.FittingsLPM GPMMaxPressureDrop(psid)Lengthmm(in)NominalK-factorPulses/GalWeightkg(lb)FTB-401A 11/2″ TRI 1.32 to13.20.35 to3.53.090.4(3.56)15,000 3 lbsFTB-402A 11/2″ TRI 2.84 to28.40.75 to7.55.090.4(3.56)8,900 3 lbsFTB-403A 11/2″ TRI 4.73 to361.25 to9.55.290.4(3.56)5,800 3 lbsFTB-404A 11/2″ TRI 6.62 to611.75 to163.090.4(3.56)5,200 3 lbsFTB-405A 11/2″ TRI 9.5 to1102.5 to295.082.5(3.25)2,200 3 lbsFTB-406A 11/2″ TRI 15 to2274 to 60 5.190.4(3.56)840 3 lbsFTB-407A 11/2″ TRI 23 to3526 to 93 4.3116.5(4.59)400 4 lbsFTB-408A 11/2″ TRI 30 to4928 to 130 3.0116.5(4.59)230 4 lbsFTB-409A 2″ TRI 57 to85215 to2253.3154(6.06)120 7 lbsFTB-410A 21/2″ TRI 95 to151425 to4004.0254(10)97 8 lbsFTB-411A 3″ TRI 151 to246040 to6504.0254(10)45 12 lbsNote: Operating pressure is limited by the TRI fitting.-2-2.Operation2.1 PrincipleThe turbine flow sensor consists of a rotor assembly which is supported on a shaft held in place by triple tube clusters and secured with locking nuts within the flowmeter housing.The rotor is free to spin on a self lubricated ceramic ball bearing. A magnetic type pickup coil is attached on the exterior of the flowmeter housing.A low mass rotor design allows for rapid dynamic response. The deflector cones eliminate downstream thrust on the rotor and allows for dynamic positioning of the rotor between deflector cones.The dynamic positioning of the low mass rotor provides wider rangeability and longer bearing life than that of conventional turbine flowmeters. Integral flow straightening tubes minimize the effects of upstream flow turbulence.As the liquid flows through the flowmeter the rotor spins at rate proportional to the volumetric liquid flowrate.Each rotor blade passing through the pickup coil generates an electrical pulse. The frequency of the pulses is proportional to flowrate. The summation of pulses represents total amount of liquid volume passed through the meter.The number of pulses generated per unit of volume is called the calibration factor or K-Factor. This calibration factor is used to calculate flowrate and total amount of flow.Material Selection and ConstructionThe housing is made of 316 stainless steel. The rotor is made of 17.4 pH stainless steel. Bearings are composite hard carbon, FDA approved.-3-Flowmeter CalibrationsThe standard calibration provided with an Omega turbine flowmeter consists of a 10-point water calibration that is traceable to NIST. Based on this water calibration, we derive an average k-factor for water for the flowmeter.The uncertainty of this calibration is typically 0.1%.The K-factor on turbine flowmeters used on liquid service is NOT density dependent.2.2 Precautions♦Do not drop the meter. Dropping the meter may result in damage to the meter housing and/or internals.♦Do not operate the meter at flowrates greater than the maximum flowrate marked on the meter. Operating at flowrates greater than the maximum flowrate may over-spin the meter. Over-spinning may result in damage to the meter.CAUTION:Avoid over-spinning the meter. Over-spinning the meter may result in damage to the meter internals and lead to meterfailure.-4-3.InstallationCAUTION:Turbine meter has to be installed with pickup coil pointing down (see Appendix A) to ensure proper cleanability.Inspect all packages for any indications of damage which may have occurred during shipment.Verify that all meter parts or auxiliary components have arrived with the shipment. Refer to the packing list/invoice for a detailed list of items included in the shipment.3.1 General PipingIt is required to install meter with a minimum straight run of pipe approximately 10 pipe diameters ahead of the inlet and 5 pipe diameters following the outlet to avoid any effect of fluid swirls.The meter housing is marked by a flow direction arrow and the inlet is marked ‘IN’ and the outlet is marked ‘OUT’. The meter must be installed in the piping in the correct orientation to ensure the most accurate operation.Install meter with adequate distance and isolation from electric motors, transformers, welding equipment and solenoids to avoid any electromagnetic interference from ambient electrical field.When it is expected that flow will be intermittent, the meter should not be mounted at a low point in the piping system. Solids which settle or congeal in the meter may affect meter performance.-5-Blocking and Bypass valves should be installed if it is necessary to do preventive maintenance on the flowmeter without shutting down the flow system. The Bypass valve can be opened before the Blocking valves are closed allowing the flow to continue while removing the turbine flowmeter for service.IMPORTANT: All flow lines should be purged prior to installing the meter. To prevent possible damage to the meter, install themeter ONLY in flow lines that are clean and free of debris. Upon initial start-up of the system a spool piece should be installed in place of the flowmeter so that purging of the system can be performed to remove all particle debris which could cause damage to the meter internals. In applications where meter flushing is required after meter service, care should be taken as to not over-spin the meter, as severe meter damage may occur.CAUTION:Avoid over-spinning the meter. Over-spinning the meter may result in damage to the meter internals and lead to meterfailure.-6--7-To maintain an accurate flow measurement it is necessary to maintain a downstream pressure sufficient to prevent flashing/cavitation. Flashing of the liquid will result in an indication of flow significantly higher than the actual flow. In order to eliminate this condition adequate downstream pressure must be maintained. The minimum required downstream pressure may be calculated using the following equation:Downstream pressure may be maintained by a downstream valve that provides the necessary downstream pressure to prevent flashing/cavitation in the metering run.3.2 Strainers/FiltersTurbine flowmeters are designed for use in a clean fluid service. However, the service fluid may carry some particulate material which would need to be removed before reaching the flowmeter. Under these conditions a strainer/filter may be required to reduce the potential hazard of fouling or damage that may be caused by foreign matter.METER SIZEMESH SIZEPARTICLE SIZE(Maximum)¼” to ½”100 .0055 5/8” to 1¼”70 .008 1½” to 3”40.015If a strainer/filter is required in the system, it should be located upstream of the flowmeter taking care that the proper minimum distance is kept between the strainer and flowmeter.3.3 Flow Straighteners and Installation KitsProper application of the Omega FTB-400A Series Flowmeter requires a minimum inlet straight pipe run of 10 pipe diameters and a minimum outlet straight pipe run of 5 pipe diameters.Installation kits for the Omega FTB-400A Series Flowmeter consist of two lengths of appropriate tubing cut to a length appropriate for the upstream and downstream straight pipe run with appropriate end fittings. Flow straightening sections may be provided within the installation kit. ()()essure xVapor essureDrop x essure Minimum Pr 25.1Pr 2Pr +=4.MaintenanceProcedures4.1 CleaningThe Omega FTB-400A Series flowmeters have been designed to allow for cleaning by commercially accepted practices. These include removing the flowmeter from the line for cleaning in an approved fluid, flushing the line with an approved cleaning solution, and steam cleaning. With all cleaning methods, care must be taken to not over-spin the meter, as severe meter damage may occur.CAUTION:Avoid over-spinning the meter. Over-spinning the meter may result in damage to the meter internals and lead to meterfailure.4.2.1 ChemicalCleaningThe flowmeters may be chemically cleaned using an approved cleaning solution by removing the meter from the service line and using a bath or by flushing the meter in place.The hard carbon composite bearing designs used have been tested and found to be compatible with the following CIP fluids manufactured by Klenzade; Mandate, AC-300, AC-101, Principle, and XY-12.Following the cleaning operation, the cleaning solution should be flushed from the meter and/or service line with potable water to remove the chemically active cleaning solution.Care should be taken to ensure that flowrates occurring during chemical cleaning do not exceed the flow capacity of the flowmeter.4.2.2Steam CleaningSteam cleaning is only recommended for meters with hard carbon composite bearings.The steam flow velocity during the cleaning should not exceed 1/3 of the maximum liquid flow capacity of the flowmeter.-8-Steam Cleaning Rates at Various Steam PressuresMeter Size 50 psigPPH175 psigPPH1100 psigPPH1125 psigPPH1VelocityFPS2RateGPM31/4 1.25 1.70 2.25 2.50 1.72 1.05 3/8 2.70 3.67 4.75 5.39 3.68 2.25 1/2 3.50 4.73 6.14 7.00 4.74 2.90 5/8 5.78 7.82 10.20 11.50 5.02 4.80 3/4 10.50 14.20 18.40 20.90 6.32 8.701 21.70 29.40 38.10 43.10 7.35 18.001¼ 33.70 45.70 59.30 67.10 7.32 28.00 1½ 47.00 63.60 82.50 93.50 7.08 39.002 81.30 110.10 142.80 162.00 6.89 67.502½ 144.60 196.00 254.00 288.00 7.84 120.003 235.00 318.00 412.60 467.00 8.85 195.00 NOTES1.PPH = Pounds Per Hour2.The velocity is expressed for a line size equal to the inlet bore of the flowmeter.3.The apparent GPM is provided since many applications have a flow rate indicatorwhich can be used to set a safe flow rate during the steam cleaning cycle.-9--10-4.3 Pickup Coil TestingTesting the MAG and MCP (RF) coils consists of measuring theresistance with an ohmmeter. Resistance measurements are to be madeonly when there is no flow through the meter.1. Measure the resistance between pin A and pin B. The resistanceshould be approximately as listed in the following table of somecommon coils.2. The resistance from any pin to the case should be greater than 1Mohm.COIL *DC RESISTANCE (Ohms) MC2PAHT15.0 ±10% MCP3A11.5 ±10% PC13-74G1800 ±10% PC13-74S1850 ±15% PC24-45G1350 ±10% PC24-45S1850 ±15% PC28-13G120 ±20% PC28-14G 180 ±20%If either resistance measurement fails, replace the pickup coil. Firmlyseat the new coil in the flowmeter and tighten the locking nut.*For specific coils not listed contact the HFC Customer Service Department for theapproximate resistance readings.4.4 TroubleShootingRefer to the following troubleshooting guide for assistance with possible meter malfunctions:TROUBLE CAUSE REMEDY Fluid will not flow ▪Meter clogged. Clean meter.through the meter ▪Line to meterblocked.Clean line to meter.Reduced flow through the meter ▪Meter partiallyclogged.Clean meter.▪Line to meterpartially blocked.Clean line to meter.Meter readings inaccurate ▪Fluid flowrate isnot within meterflow range.See “Specifications” formin and max flowrates.▪Meter drag due toimproperinstallationReplace internals.-11-DRAWINGTypical Assembly Sanitary Flowmeter with Installation Kit-12-WARRANTY/DISCLAIMEROMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month grace period to the normal one (1) year product warranty to cover handling and shipping time. T his ensures that OMEGA’s customers receive maximum coverage on each product.If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service Department will issue an Authorized Return (AR) number immediately upon phone or written request. Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no charge. OMEGA’s WARRANT Y does not apply to defects resulting from any action of the purchaser, including but not limited to mishandling, improper interfacing, operation outside of design limits, improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of having been tampered with or shows evidence of having been damaged as a result of excessive corrosion; or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating conditions outside of OMEGA’s control. Components in which wear is not warranted, include but are not limited to contact points, fuses, and triacs.OMEGA is pleased to offer suggestions on the use of its various products. However, OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any damages that result from the use of its products in accordance with information provided by OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by the company will be as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR REPRESENTATIONS OF ANY KIND W HATSOEVER, EXPRESSED OR IMPLIED, EXCEPT THAT OF TITLE, AND ALL IMPLIED W ARRANTIES INCLUDING ANY W ARRANTY OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF LIABILITY: The remedies of purchaser set forth herein are exclusive, and the total liability of OMEGA with respect to this order, whether based on contract, warranty, negligence, indemnification, strict liability or otherwise, shall not exceed the purchase price of the component upon which liability is based. In no event shall OMEGA be liable for consequential, incidental or special damages.CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic Component” under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical applications or used on humans. Should any Product(s) be used in or with any nuclear installation or activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility as set forth in our basic WARRANTY / DISCLAIMER language, and, additionally, purchaser will indemnify OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the Product(s) in such a manner.RETURN REQUESTS/INQUIRIESDirect all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE RET URNING ANY PRODUCT (S) T O OMEGA, PURCHASER MUST OBT AIN AN AUT HORIZED RET URN (AR) NUMBER FROM OMEGA’S CUST OMER SERVICE DEPART MENT (IN ORDER T O AVOID PROCESSING DELAYS). T he assigned AR number should then be marked on the outside of the return package and on any correspondence.The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent breakage in transit.OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords our customers the latest in technology and engineering.OMEGA is a registered trademark of OMEGA ENGINEERING, INC.© Copyright 2016 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the prior written consent of OMEGA ENGINEERING, INC.FOR WARRANTY RETURNS, please have the following information available BEFORE contacting OMEGA:1. Purchase Order number under which the product was PURCHASED,2. M odel and serial number of the product under warranty, and3. R epair instructions and/or specific problems relative to the product.FOR NON-WARRANTY REPAIRS, consult OMEGA for current repair charges. Have the following information available BEFORE contacting OMEGA:1. P urchase Order number to cover the COST of the repair,2. Model and serial number of the product, and 3. Repair instructions and/or specific problemsrelative to the product.Where Do I Find Everything I Need for Process Measurement and Control?OMEGA…Of Course!Shop online at SMTEMPERATUREM U Thermocouple, RTD & Thermistor Probes, Connectors, Panels & AssembliesM U Wire: Thermocouple, RTD & ThermistorM U Calibrators & Ice Point ReferencesM U Recorders, Controllers & Process MonitorsM U Infrared PyrometersPRESSURE, STRAIN AND FORCEM U Transducers & Strain GagesM U Load Cells & Pressure GagesM U Displacement TransducersM U Instrumentation & AccessoriesFLOW/LEVELM U Rotameters, Gas Mass Flowmeters & Flow ComputersM U Air Velocity IndicatorsM U Turbine/Paddlewheel SystemsM U Totalizers & Batch ControllerspH/CONDUCTIVITYM U pH Electrodes, Testers & AccessoriesM U Benchtop/Laboratory MetersM U Controllers, Calibrators, Simulators & PumpsM U Industrial pH & Conductivity EquipmentDATA ACQUISITIONM U Communications-Based Acquisition SystemsM U Data Logging SystemsM U Wireless Sensors, Transmitters, & ReceiversM U Signal ConditionersM U Data Acquisition SoftwareHEATERSM U Heating CableM U Cartridge & Strip HeatersM U Immersion & Band HeatersM U Flexible HeatersM U Laboratory HeatersENVIRONMENTALMONITORING AND CONTROLM U Metering & Control InstrumentationM U RefractometersM U Pumps & TubingM U Air, Soil & Water MonitorsM U Industrial Water & Wastewater TreatmentM U pH, Conductivity & Dissolved Oxygen InstrumentsM2124/0617。

e-mail:**************For latest product manuals: /en-us/pdf-manualsShop online at User’s GuideDPG210-KITPressure Calibration KitNOTICE1.Please check the packaging and appearance after you received the product.2.Please check the mode and specification of the product. Ensure correct electrical connection and mounting method.3.Power: three AA battery or USB-power.4.During use, please note the technical and operation conditions: the temperature of medium, burst pressure, power supply.5.This product is a precision device, DO NOT use hard objects to touch the diaphragm or disassemble.6.During installation, do not install or uninstall with excessive forces, take special care with the installation of thread.7.Please install or uninstall with a suitable wrench.8.After starting the gauge, it is a normal phenomenon to take a few minutes to stabilize and work normally.9.During installation, the gauge may be affected by installation stress. After installation,please clear zero with no pressure applied.[!) Product damage caused by non-professional operation according to the operation instructions is not within the scope of the warranty.The DPG210-KIT pressure calibration kits combine the high accuracy of our DPG210 digital pressure gauges with a pneumatic or hydraulic hand pump, providing an excellent solution for field calibration needs. Kits include the DPG210 digital gauge in your selected pressure range, hand pump, rugged carrying case, and a selection of fittings and hose. Kits with ranges of 500 psi or below includes a pneumatic handpump capable of generating 0 to 500 psi pressure. For ranges of 1,000 psi or higher, a 0 to 10,000 psi hydraulic hand pump is included.Notice: The oil cup is made of plexiglass. It is forbidden to contact with volatile media such as alcohol, dimethyl pump, ether, etc., to avoid damage to the oil cupPneumatic and Hydraulic hand pumpsThe Pneumatic and Hydraulic hand-held pumps are both used in conjunction with the DPG210 digital pressure gauge. It is a fast pressure source. It can easily achieve vacuum and positive pressure by adjusting the pressure and vacuum valve. It is suitable for calibrating various differential pressure, vacuum, pressure vacuum and pressure meters. It can also be used as the above-mentioned meters. Pressure vacuum source. It is portable, light in weight, light in operation, easy to carry and use, and can be used with pressure and vacuum instruments. Ranges lower than 500 psi are for the Pneumatic hand pump and ranges higher than 500 psi are for the Hydraulic hand pump.The pressure fine-tuning handle is designed in structure, and the output pressure can be easily changed by rotating the fine-tuning handle. In addition, there is a high-pressure hose connection to be calibrated meter, output port connection standard meter. The hand-held pressure pump can be carried to the site and directly connected with the instrument to be calibrated, and the calibration is quick and simple. It is used to verify the pressure measuring instruments installed on site and various pressure instruments used in the control room. It can also provide a pressure source for the factory calibration of pressure measuring instruments.▪Output pressure:o Pneumatic (Ranges 100-500 psi): -13.78~595 psio Hydraulic (Ranges >500): 0~10007 psi▪Working environment:o Temperature: 0-40℃ (0-104℉)▪Threaded interface: ¼ NPT▪Weight: 2.0KG▪High pressure hose connector thread: ¼ NPT internal thread INSTRUCTIONS:▪After connecting the meter, close the pressure relief valve, and then hold the handle to start pressing (just a light hold with your hand)▪Push the pressure vacuum valve from one side of the reversing mark "V" to the other side to easily achieve vacuum; push the pressure vacuum valve from one side of the reversing mark "P" to the other side to easily achieve positive pressure▪In order to obtain an accurate pressure value during positive pressure, it can be achieved bya fine-tuner in a small range.▪After the pressure is suppressed, first release the pressure through the pressure relief valve, and then remove the meter.PRECAUTION:During the calibration process, attention should be paid to keeping all connections sealed. After calibration, the pressure relief valve must be rotated to release the pressure before disassembling the instrument, otherwise the instrument may be damaged.For the Hydraulic pump: Before using the pressure pump, unscrew the breather, fill it with a proper amount of oil (such as 1/2 cylinder of special oil), then tighten the breather, hold it firmly, loosen the handle, and drive out the gas in the cylinder for use. **************Servicing North America:U.S.A. Omega Engineering, Inc.Headquarters: T oll-Free: 1-800-826-6342 (USA & Canada only)Customer Service: 1-800-622-2378 (USA & Canada only) Engineering Service: 1-800-872-9436 (USA & Canada only)Tel: (203) 359-1660 Fax: (203) 359-7700e-mail:**************For Other Locations Visit /worldwideThe information contained in this document is believed to be correct, but OMEGA accepts no liability for any errors it contains, and reserves the right to alter specifications without notice.WARRANTY/DISCLAIMEROMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month grace period to the normal one (1) year product warranty to cover handling and shipping time. This ensures that OMEGA’s customers receive maximum coverage on each product.If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service Department will issue an Authorized Return (AR) number immediately upon phone or written request. Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no charge. OMEGA’s WARRANTY does not apply to defects resulting from any action of the purchaser, including but not limited to mishandling, improper interfacing, operation outsideor vibration; improper specification; misapplication; misuse or other operating conditions outside of OMEGA’s control. Components in which wear is not warranted, include but are not limited to contact points, fuses, and triacs.OMEGA is pleased to offer suggestions on the use of its various products. However, OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any damages that result from the use of its products in accordance with information provided by OMEGA, eitherLIMITATION OF LIABILITY: The remedies of purchaser setforth herein are exclusive, and the total liability of OMEGA with respect to this order, whether based on contract, warranty, negligence, indemnification, strict liability or otherwise, shall not exceed the purchase price of the component upon which liability is based. In no event shall OMEGA be liable for consequential, incidental or special damages.CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic Component”under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical applications or used on humans. Should any Product(s) be used in or with any nuclear installation or activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility as set forth in our basic WARRANTY /D ISCLAIMER language, and, additionally, purchaser will indemnify OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the Product(s) in such a manner.RETURN REQUESTS / INQUIRIESDirect all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN AUTHORIZED RETURN (AR)NUM BER FROM OMEGA’SCUSTOMER SERVICE DEPARTMENT (IN ORDER TO AVOID PROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return package and on any correspondence.The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent breakage in transit.FOR WARRANTY RETURNS, please have the following information available BEFORE contacting OMEGA:1.Purchase Order number under which the product was PURCHASED,2.Model and serial number of the product under warranty, and3.Repair instructions and/or specific problems relative to the product.of design limits, improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of having been tampered with or shows evidence of having been damaged as a result of excessive corrosion; or current, heat, moistureverbal or written. OMEGA warrants only that the parts manufactured by the company will be as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESSED OR IMPLIED, EXCEPT THAT OF TITLE, AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED.FOR NON-WARRANTY REPAIRS, consult OMEGA for current repair charges. Have the following information available BEFORE contacting OMEGA:1.Purchase Order number to cover the COST of therepair,2.Model and serial number of the product, and3.Repair instructions and/or specific problems relative to the product.OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords our customers the latest in technology and engineering. OMEGA is a trademark of OMEGA ENGINEERING, INC.© Copyright 2018 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the prior written consent of OMEGA ENGINEERING, INC.。
RMS Current Loggers Model OM-SL-L100 Model OM-SL-L110 USER MANUALM-3437/0899FOR WARRANTY RETURNS, please have the followinginformation available BEFORE contacting OMEGA:1. P.O. number under which the product wasPURCHASED,2. Model and serial number of the product underwarranty, and3. Repair instructions and/or specific problemsrelative to the product.WARRANTY/DISCLAIMEROMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a period of 13 months from date of purchase. OMEGA Warranty adds an additional one (1) month grace period to the normal one (1) year product warranty to cover handling and shipping time. This ensures that OMEGA's customers receive maximum coverage on each product.If the unit should malfunction, it must be returned to the factory for evaluation. OMEGA's Customer Service Department will issue an Authorized Return (AR) number immediately upon phone or written request. Upon examination by OMEGA, if the unit is found to be defective it will be repaired or replaced at no charge. OMEGA's WARRANTY does not apply to defects resulting from any action of the purchaser, including but not limited to mishandling, improper interfacing, operation outside of design limits, improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of having been tampered with or shows evidence of being damaged as a result of excessive corrosion; or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating conditions outside of OMEGA's control. Components which wear are not warranted, including but not limited to contact points, fuses, and triacs.OMEGA is pleased to offer suggestions on the use of its various products. However, OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any damages that result from the use of its products in accordance with information provided by OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by it will be as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESSED OR IMPLIED, EXCEPT THAT OF TITLE, AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF LIABILITY: The remedies of purchaser set forth herein are exclusive and the total liability of OMEGA with respect to this order, whether based on contract, warranty, negligence,indemnification, strict liability or otherwise, shall not exceed the purchase price of the component upon which liability is based. In no event shall OMEGA be liable for consequential,incidental or special damages.CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a "Basic Component" under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical applications or used on humans. Should any Product(s) be used in or with any nuclear installation or activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility as set forth in our basic WARRANTY/ DISCLAIMER language, and additionally,purchaser will indemnify OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the Product(s) in such a manner.RETURN REQUESTS/ INQUIRIESDirect all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN AUTHORIZED RETURN (AR) NUMBER FROM OMEGA'S CUSTOMER SERVICE DEPARTMENT (IN ORDER TO AVOID PROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return package and on any correspondence.The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent breakage in transit.OMEGA's policy is to make running changes, not model changes, whenever an improvement is possible. This affords our customers the latest in technology and engineering.OMEGA is a registered trademark of OMEGA ENGINEERING, INC.© Copyright 1996 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied,photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without prior written consent of OMEGA ENGINEERING, INC.FOR NON-WARRANTY REPAIRS , consult OMEGA for current repair charges. Have the following information available BEFORE contacting OMEGA:1. P.O. number to cover the COST of the repair,2. Model and serial number of product, and 3. Repair instructions and/or specific problems relative to the product.Table of ContentsWarning (4)International Electrical Symbols (4)Receiving Your Shipment (5)Packaging (5)Specifications (6)Features (8)Indicators And Buttons (8)Inputs And Outputs (8)Mounting (8)Battery Installation (9)Operation (9)Software (10)Minimum Computer Requirements (10)Installation (10)Using The Software (11)Cleaning (11)WarningThese safety warnings are provided to ensure the safety of personnel and proper operation of the instrument.• Read the instruction manual completely and follow all the safety information before attempting to use or service this instrument.• Use caution on any circuit: Potentially high voltages and currents may be present and may pose a shock hazard.• Read the Safety Specifications section prior to using the current probe.Never exceed the maximum voltage ratings given.• Safety is the responsibility of the operator.• For maintenance, use only original replacement parts.• NEVER open the back of the instrument while connected to any circuit or input.• ALWAYS connect the recorder to the probe before clamping the probe onto the sample being tested.• ALWAYS inspect the instrument and lead prior to use. Replace any defective parts immediately.• NEVER use the Models OM-SL-L100 and L110 on electrical conductors rated above 600 V in overvoltage category III (CAT III).• ALWAYS use probes rated for 600 V working voltage.International Electrical SymbolsThis symbol signifies that the Loggers are protected by double orreinforced insulation. Use only specified replacement parts whenservicing the instrument.This symbol signifies CAUTION! and requests that the user referto the user manual before using the instrument.For more information about the Logger, refer to disk 2: MAIN MANUALReceiving Your ShipmentUpon receiving your shipment, make sure that the contents are consistent with the packing list. Notify OMEGA of any missing items. If the equipment appears to be damaged, file a claim immediately with the carrier and notify OMEGA at once, giving a detailed description of any damage.PackagingThe Loggers OM-SL-L100 and OM-SL-L110 include the following:• User manual• One 9 V battery• Two 3½” disks containing the window-based download and graphic software and a generic user manual• Six ft. long RS232 cable• Set of velcro mounting padsSpecificationsELECTRICALNumber of Channels: 1Measurement Range: 0 to 10,000 Arms(Requires optional current probe)Input:0 -1 Vrms (L100)0 - 1 Arms (L110)Input Connection: Recessed Safety Banana Jacks*Accuracy: 1% Readings + Resolution + Probe accuracyResolution : 8 BitsScale Range Maximum Input Resolution100% 1 A or 1 V0.004 A or V50%0.5 A or 0.5 V0.002 A or V25%0.25 A or 0.25 V0.001 A or V12.5%0.125 A or 0.125 V0.0005 A or VSample Rate: 4096/hr max. decreases by 50% each time memory is full Data Storage: 8192 readingsData Storage Technique: (TXR™) Time Extension Recording™Power: 9V Alkaline NEDA 1604, 6LF22, 6LR61Battery Life Recording: 1 year continuous recording @ 25°COutput: RS-232 via 9 pin “D” shellINDICATORSOperation Mode Indicator: One Red LED• Single Blink in stand-by mode• Double Blink in RECORD mode• Continuously on: Overload condition• No Blinks in OFF mode*Reference condition: 23°C ± 3K, 20 to 70% RH, Frequency 50/60Hz, No AC external magnetic Field, DC magnetic field ≤ 40A/m, centered conductor, battery voltage 9 Volts ± 10%.CONTROLS:One button used to start and stop recording sessions and to turn the data logger on and OFF.ENVIRONMENTALOperating Temperature: -4 to + 158°F (-20 to +70°C)Storage Temperature: -4 to + 174°F (-20 to +80°C)Relative Humidity: 5 to 95% non-condensingMECHANICALSize: 2-7/8” W x 2-5/16” H x 1-5/8” D (73mm x 59mm x 41mm)Weight (with battery): 5 oz (140 g)Mounting: Base plate mounting holes or Velcro® padsSAFETYWorking Voltage: IEC1010-1, 600V, Cat IIIORDERING INFORMATIONRMS Current Logger, 0 - 1 V AC .............................Model OM-SL-L100 RMS Current Logger, 0 - 1 A AC..............................Model OM-SL-L110 Accessories:Flexible Current Probe 24” 1-500 A AC..........................Model HHM806 Flexible Current Probe 24” 1-1000 A AC........................Model HHM808 Flexible Current Probe 24” 10-6000 A AC......................Model HHM812 Flexible Current Probe 36” 10-6000 A AC.................Model HHM812-36 Flexible Current Probe 24” 10-10000 A AC.....................Model HHM814 Flexible Current Probe 36” 10-10000 A AC................Model HHM814-36 Flexible Current Probe 48” 1-10000 A AC.................Model HHM814-48 Replacement 6ft RS232 cable with DB9F ...............OM-SL-RS232-DB9FeaturesIndicators and ButtonsThe data logger has only one button and one indicator. Both are located on the front panel.The button is used to start and stop recordings and to turn the data logger on and off. The red LED indicates the status of the data logger; OFF, STANDBY or RECORDING. When the LED is lit continuously it indicates an Overload condition.Inputs and OutputsThe left side of the data logger incorporates 2mm safety banana jacks input connectors compatible with the current probes for which your data logger was designed.The right side of the data logger has a female 9 pin “D” shell serial connector used for data transmission from the data logger to your computer.MountingYour data logger is equipped with clearance holes in the base plate tabs for mounting. For less permanent mounting, the Velcro pads (supplied loose) can be attached to the data logger and the surface to which the data logger will be mounted.Battery InstallationUnder normal conditions, the battery will last up to a year of continuous recording unless the logger is re-started very frequently.In the OFF mode, the logger puts almost no load on the battery. Use the OFF mode when the logger is not in use. Replace the battery once a year in normal use.If the logger will be used at temperatures below 32°F (0°C) or is frequently turned on and off, replace the battery every six to nine months.1. Make sure your logger is turned off (no light blinking) and allinputs are disconnected.2. Turn the data logger upside down. Remove the four Phillips headscrews from the base plate of the data logger and take off thebase plate.3. Locate the two wire (red/black) battery connector and attach the9 V battery to it. Make sure that you observe polarity by lining upthe battery posts to the proper terminals on the connector.4. Once the connector is plugged onto the battery, insert the batteryinto the holding clip on the circuit board5. Re-attach the base plate using the four screws removed in steptwo.Your data logger is now recording (LED blinking). Press the test button for 5 seconds to stop the instrumentNote: For long term storage, remove the battery to prevent discharge effects.OperationConnect the current probe to the Logger and position the probe around the conductor to be measured. Make sure that the jaws are firmly closed before beginning the recording session. (Probe output can not be more than 1V AC for Model OM-SL-L100 and 1A AC for the Model OM-SL-110).Next, press the start/stop button on the front of the unit to begin the recording session. The indicator light will double blink to indicate that the recording session has started.When the recording session has been completed, press the start/stop button to end the recording. The indicator light will single blink to indicate that the recording session has ended and the unit is in stand-by. Unclamp the probe from the conductor and connect the Logger to the computer for data downloading. See Section 2 page 19 of the main manual for downloading.SOFTWAREMINIMUM COMPUTER REQUIREMENTSProcessor: 386 or higherRAM Storage: 4 MB minimumHard Drive Space:100K for application, approximately 200K for each stored file Environment: Windows 3.1 or Windows 95Port Access: 1 available 9 pin serial port1 parallel port for printer supportINSTALLATIONYour data logger software is supplied on a single 3½” floppy disk. To install the program on your Windows based computer, proceed as follows: The software is Multilanguage. A prompt will ask you to select the language at the end of the installation process.Windows 3.1 Systems1. Insert the floppy disk containing the data logger software in yourcomputer’s floppy drive (usually Drive A).2. From the Program Manager select “File” on the command line.3. Select “Run” from the pull-down menu and type a:setup in thedialog box then click on “OK”.4. The set up program will temporarily load onto your computer.5. Next the setup program will offer C:\DATALOG as location wherethe software will be installed. Click on “Next” to use this directory or type in a new name, then click on “Next”.6. A bar graph will appear showing the progress of installation. Wheninstallation is complete a message screen will appear stating that the program has been installed. Click on “OK”. You are now ready to use the data logger software.Windows 95 Systems1. Insert the floppy disk containing the data logger software in yourcomputer’s floppy drive (usually Drive A).2. Click on the “Start” button on the bottom left side of the screen.3. Select “Run” from the menu and type a:setup in the dialog box thenclick on “OK”.4. The setup program will temporarily load onto your computer.5. Next the setup program will offer C:\DATALOG as location wherethe software will be installed. Click on “Next” to use this directory or type in a new name, then click on “Next”.6. A bar graph will appear showing the progress of installation. Wheninstallation is complete a message screen will appear stating that the program has been installed. Click on “OK”. You are now ready to use the data logger software.USING THE SOFTWARELaunch the software and connect the RS232 cable from your computer from the logger.Select “FILE”, “Baud rate” and “1200”, then select “PORT”, Com1, Com2, Com3 or Com4 (see your computer manual). The logger must now communicate with your computer (ID number of the logger and number of points recorded displayed).Select “FUNCTION”, then Logger L100 or L110 to choose your probe ratio. Select download to display the graph. (Download takes about 90 seconds)FunctionThe FUNCTION command allows you to select the correct engineering units for the recorded data.When you click on Function, a pull-down window will appear with all the choices supported by the version of software you have installed. This menu will only appear if a data logger is connected to the COM port. Simply click on the desired group and then select the proper units from the window that opens. Depending on which type of logger is connected, the pull-down menu under Function may be empty. You will be returned to the main screen and the graph Y axis scale will be recalculated using the choice you made here.Future downloads will use the units selected here for graphing as well. The data logger communicates to the software its basic configuration. Therefore, you will only be offered choices that are compatible to the data logger.CleaningThe body of the clamp should be cleaned with a cloth moistened with soapy water. Rinse with a cloth moistened with clean water. Do not use solvent.11OMEGAnet SM On-Line Service: Internete-mail:**************Servicing North America:USA:One Omega Drive, Box 4047ISO 9001 Certified Stamford, CT 06907-0047Tel: (203) 359-1660FAX: (203) 359-7700e-mail:**************Canada:976 BergarLaval (Quebec) H7L 5A1Tel: (514) 856-6928FAX: (514) 856-6886e-mail:****************For Immediate Technical or Application Assistance:USA and Canada:Sales Service: 1-800-826-6342 1-800-TC-OMEGA SMCustomer Service: 1-800-622-2378 / 1-800-622-BEST SMEngineering Service: 1-800-872-9436 / 1-800-USA-WHEN SMTELEX: 996404 EASYLINK 62968934 CABLE: OMEGAMexico and Tel: (95) 800-TC-OMEGA SM FAX: (95) 203-359-7807 Latin America:En Espanol: (203) 359-1660 ext: 2203e-mail:*****************Servicing Europe:Benelux:Postbus 8034,1180 LA Amstelveen, The NetherlandsTel: (31) 20 6418405FAX: (31) 20 6434643Toll Free in Benelux: 06 0993344e-mail:************Czech Republic:Ostravska 767, 733 01 KarvinaTel: 420 (69) 6311899FAX: 420 (69) 6311114e-mail:***************France:9, rue Denis Papin, 78190 TrappesTel: (33) 130-621-400FAX: (33) 130-699-120Toll Free/France: 0800-4-06342e-mail:**************** Germany/Austria:Daimlerstrasse 26, D-75392 Deckenpfronn, GermanyTel: 49 (07056) 3017FAX: 49 (07056) 8540Toll Free in Germany: 0130 11 21 66e-mail:*****************United Kingdom:25 Swannington Road,P.O. Box 7, Omega Drive, 150 9002 Certified Broughton Astley, Leicestershire,Irlam, Manchester,LE9 6TU, England M44 5EX, EnglandTel: 44 (1455) 285520Tel: 44 (161) 777-6611FAX: 44 (1455) 283912FAX: 44 (161) 777-6622Toll Free in England: 0800-488-488e-mail:************It is the policy of OMEGA to comply with all worldwide safety and EMC/EMI regulations that apply. OMEGA is constantly pursuing certification of its products to the European New Approach Directives. OMEGA will add the CE mark to every appropriate device upon certification.The information contained in this document is believed to be correct but OMEGA Engineering, Inc. accepts no liability for any errors it contains, and reserves the right to alter specifications without notice. WARNING: These products are not designed for use in, and should not be used for, patient connected applications.Where Do I Find Everything I Need for Process Measurement and Control?OMEGA ... Of Course!TEMPERATURE οThermocouple, RTD & Thermistor Probes, Connectors, Panels & Assemblies οWire: Thermocouple, RTD & Thermistor οCalibrators & Ice Point References οRecorders, Controllers & Process Monitors οInfrared PyrometersPRESSURE / STRAIN FORCE οTransducers & Strain GaugesοLoad Cells & Pressure GaugesοDisplacement TransducersοInstrumentation & AccessoriesFLOW / LEVEL οRotameters, Gas Mass Flowmeters & Flow Computers οAir Velocity IndicatorsοTurbine / Paddlewheel SystemsοTotalizers & Batch ControllerspH/CONDUCTIVITY οpH Electrodes, Testers & AccessoriesοBenchtop / Laboratory MetersοControllers, Calibrators, Simulators & PumpsοIndustrial pH & Conductivity EquipmentDATA ACQUISITION οData Acquisition & Engineering SoftwareοCommunications-Based Acquisition SystemsοPlug-in Cards for Apple, IBM & CompatiblesοDatalogging SystemsοRecorders, Printers & PlottersHEATERS οHeating CableοCartridge & Strip HeatersοImmersion & Band HeatersοFlexible HeatersοLaboratory HeatersENVIRONMENTAL MONITORING AND CONTROL οMetering & Control InstrumentationοRefractometersοPumps & TubingοAir, Soil & Water MonitorsοIndustrial Water & Wastewater Treatment 333333333333333333333333333333333ο pH, Conductivity & Dissolved Oxygen Instruments14。
MQS5058/0113e-mail:**************For latest product manuals:W A R R A N T Y /D I S C L A I M E RO M E G A E N G I N E E R I N G , I N C ., w a r r e n t s t h i s u n i t t o b e f r e e o f d e f e c t s i n m a t e r i a l s a n d w o r k m a n s h i p f o r a p e r i o d o f 13 m o n t h s f r o m d a t e o f p u r c h a s e . O M E G A ’s W A R R A N T Y a d d s a n a d d i t i o n a l o n e (1) m o n t h g r a c e p e r i o d t o t h e n o r m a l o n e (1) y e a r p r o d u c t w a r r a n t y t o c o v e r h a n d l i n g a n d s h i p p i n g t i m e . T h i s e n s u r e s t h a t O M E G A ’s c u s t o m e r sr e c e i v e m a x i m u m c o v e r a g e o n e a c h p r o d u c t .I f t h e u n i t m a l f u n c t i o n s , i t m u s t b e r e t u r n e d t o t h e f a c t o r y f o r e v a l u a t i o n . O M E G A ’s C u s t o m e r S e r v i c e D e p a r t m e n t w i l l i s s u e a n A u t h o r i z e d R e t u r n (A R ) n u m b e r i m m e d i a t e l y u p o n p h o n e o r w r i t t e n r e q u e s t . U p o n e x a m i n a t i o n b y O M E G A , i f t h e u n i t i s f o u n d t o b e d e f e c t i v e , i t w i l l b e r e p a i r e d o r r e p l a c e d a t n o c h a r g e . O M E G A ’s W A R R A N T Y d o e s n o t a p p l y t o d e f e c t s r e s u l t i n g f r o m a n y a c t i o n o f t h e p u r c h a s e r , i n c l u d i n g b u t n o t l i m i t e d t o m i s h a n d l i n g , i m p r o p e r i n t e r f a c i n g , o p e r a t i o n o u t s i d e o f d e s i g n l i m i t s , i m p r o p e r r e p a i r , o r u n a u t h o r i z e d m o d i fi c a t i o n . T h i s W A R R A N T Y i s V O I D i f t h e u n i t s h o w s e v i d e n c e o f h a v i n g b e e n t a m p e r e d w i t h o r s h o w s e v i d e n c e o f h a v i n g b e e n d a m a g e d a s a r e s u l t o f e x c e s s i v e c o r r o s i o n ; o r c u r r e n t , h e a t , m o i s t u r e o r v i b r a t i o n ; i m p r o p e r s p e c i fi c a t i o n ; m i s a p p l i c a t i o n ; m i s u s e o r o t h e r o p e r a t i n g c o n d i t i o n s o u t s i d e o f O M E G A ’s c o n t r o l . C o m p o n e n t s i n w h i c hw e a r i s n o t w a r r a n t e d , i n c l u d e b u t a r e n o t l i m i t e d t o c o n t a c t p o i n t s , f u s e s , a n d t r i a c s .O M E G A i s p l e a s e d t o o f f e r s u g g e s t i o n s o n t h e u s e o f i t s v a r i o u s p r o d u c t s . H o w e v e r , O M E G A n e i t h e r a s s u m e s r e s p o n s i b i l i t y f o r a n y o m i s s i o n s o r e r r o r s n o r a s s u m e s l i a b i l i t y f o r a n y d a m a g e s t h a t r e s u l t f r o m t h e u s e o f i t s p r o d u c t s i n a c c o r d a n c e w i t h i n f o r m a t i o n p r o v i d e d b y O M E G A , e i t h e r v e r b a l o r w r i t t e n . O M E G A w a r r a n t s o n l y t h a t t h e p a r t s m a n u f a c t u r e d b y t h e c o m p a n y w i l l b e a s s p e c i fi e d a n d f r e e o f d e f e c t s . O M E G A M A K E S N O O T H E R W A R R A N T I E S O R R E P R E S E N T A T I O N S O F A N Y K I N D W H A T S O E V E R , E X P R E S S E D O R I M P L I E D , E X C E P T T H A T O F T I T L E , A N D A L L I M P L I E D W A R R A N T I E S I N C L U D I N G A N Y W A R R A N T Y O F M E R C H A N T A B I L I T Y A N D F I T N E S S F O R A P A R T I C U L A R P U R P O S E A R E H E R E B Y D I S C LA I M E D . L I M I T A T I O N O F L I AB I L I T Y : T h e r e m e d i e s o f p u r c h a s e r s e t f o r t h h e r e i n a r e e x c l u s i v e , a n d t h e t o t a l l i a b i l i t y o f O M E G A w i t h r e s p e c t t o t h i s o r d e r , w h e t h e r b a s e d o n c o n t r a c t , w a r r a n t y , n e g l i g e n c e , i n d e m n i fi c a t i o n , s t r i c t l i a b i l i t y o r o t h e r w i s e , s h a l l n o t e x c e e d t h e p u r c h a s e p r i c e o f t h e c o m p o n e n t u p o n w h i c h l i a b i l i t y i s b a s e d . I n n oe v e n t s h a l l O M E G A b e l i a b l ef o r c o n s e q u e n t i a l , i n c i d e n t a l o r s p e c i a l d a m ag e s .C O ND I T I O N S :E q u i p m e n t s o l d b y O M E G A i s n o t i n t e n d e d t o b e u s e d , n o r s h a l l i t b e u s e d : (1) a s a “B a s i c C o m p o n e n t ” u n d e r 10 CF R 21 (N R C ), u s e d i n o r w i t h a n y n u c l e a r i n s t a l l a t i o n o r a c t i v i t y ; o r (2) i n m e d i c a l a p p l i c a t i o n s o r u s e d o n h u m a n s . S h o u l d a n y P r o d u c t (s ) b e u s e d i n o r w i t h a n y n u c l e a r i n s t a l l a t i o n o r a c t i v i t y , m e d i c a l a p p l i c a t i o n , u s e d o n h u m a n s , o r m i s u s e d i n a n y w a y , O M EG A a s s u m e s n o r e s p o n s i b i l i t y a s s e t f o r t h i n o u r b a s i c W A R R A N T Y /D I S C L A I M E R l a n g u a g e , a n d , a d d i t i o n a l l y , p u r c h a s e r w i l l i n d e m n i f y O M E G A a n d h o l d O M E G A h a r m l e s s f r o m a n y l i a b i l i t y o r d a m a g e w h a t s o e v e r a r i s i n g o u to f t h e u s e o f t h e P r o d u c t (s ) i n s u c h a m a n n e r .R E T U R N R E Q U E S T S /I N Q U I R I E SD i r e c t a l l w a r r a n t y a n d r e p a i r r e q u e s t s /i n q u i r i e s t o t h e O ME G A C u s t o m e r S e r v i c eD e p a r t m e n t . BEF O R E R E T U R N I NG A N Y P R O D U C T (S ) T O O M E G A , P U R CH A S E R M U S T O B T AI N A N A U T H O R I Z E D R E T U R N (A R ) N U M B E R F R O M O M E G A ’S C U S T O M E R S E R V I C E D E P A R T M E N T (I N O R D E R T O A V O I D P R O C E S S I N G D E L A Y S ). T h e a s s i g n e d A R n u m b e r s h o u l d t h e n b e m a r k e d o n t h e o u t s i d e o f t h e r e t u r n p a c k a g e a n d o n a n y c o r r e s p o n d e n c e .T h e p u r c h a s e r i s r e s p o n s i b l e f o r s h i p p i n g c h a r g e s , f r e i g h t , i n s u r a n c e a n d p r o p e rp a c k a g i n g t o p r e v e n t b r e a k a g e i n t r a n s i t .F O R W A R R A N T Y R E T U R N S , p l e a s e h a v e t h e f o l l o w i n g i n f o r m a t i o n a v a i l a b l e B E F O R E c o n t a c t i n g O M EG A .1. P u r c h a s e o r d e r n u m b e r w h i c h t h e p r o d u c t w a s P U R CH A S E D ,2. M o d e l a n d s e r i a l n u m b e r o f t h e p r o d u c t u n d e r w a r r a n t y , a n d 3. R e p a i r i n s t r u c t i o n s a n d /o r s p e c i fi c p r o b l e m s r e l a t i v e t o t h e p r o d u c t .O M E G A ’s p o l i c y i s t o m a k e r u n n i n g c h a n g e s , n o t m o d e l c h a n g e s , w h e n e v e r a ni i m p r o v e m e n t i s p o s s i b l e . T h i s a f f o r d s c u s t o m e r s t h e l a t e s t t e c h n o o g y a n d e n g i n e e r i n g .O M E G A i s a r e g i s t e r e d t r a d r m a r k o f O M E G A E N G I N E E R I N G , I N C .© C O P Y R I G H T 2013 O M E G A E N G I N E E R I N G , I N C . A l l r i g h t s r e s e r v e d . T h i s d o c u m e n t m a y n o t b e c o p i e d , p h o t o c o p i e d , t r a n s l a t e d , o r r e d u c e d t o a n y e l e c t r o n i c m e d i u m -r e a d a b l e f o r m , i n w h o l e o r i n p a r t , w i t h o u t t h e p r i o r w r i t t e n c o n s e n t o f O M E G AE N G I N E E R I N G , I N C .F O R N O N -W A R R A N T Y R E T U R N S , c o n s u l tO M E G A f o r c u r r e n t r e p a i r c h a r g e s . H a v et h e f o l l o w i n g i n f o r m a t i o n a v a i l a b l e B E F O R Ec o n t a c t i n g O M E G A .1. P u r c h a s e O r d e r n u m b e r t o c o v e r t h eC O S T o f t h e r e p a i r ,2. M o d e l a n d s e r i a l n u m b e r o f t h e p r o d u c t a n d3. R e p a i r i n s t r u c t i o n s a n d /o r s p e c i fi c p r o b l e m sr e l a t i v e t o t h e p r o d u c t .U .S .A .:O m e g a E n g i n e e r i n g I n c ., O n e O m e g a D r i v e , P .O .B o x 4047I S O 9001 C e r t i fi e dS t a m f o r d , C T 06907-0047 U S AT o l l -F r e e : 1-800-826-6342 T E L : (203) 359-1600F A X : (203) 359-7700 e -m a i l : i n f o @o m e g a .c o mC a n a d a :976 B e r g a rL a v a l (Q u e b e c ) H 7L 5A 1, C a n a d aT o l l -F r e e : 1-800-826-6342 T E L : (514) 856-6928F A X : (514) 856-6886 e -m a i l : i n f o @o m e g a .c o mF o r i m m e d i a t e t e c h n i c a l o r a p p l i c a t i o n a s s i s t a n c e :U .S .A . a n d C a n a d a : S a l e s S e r v i c e : 1-800-826-6342/1-800-T C -O M E G AC u s t o m e r S e r v i c e : 1-800-622-2378/1-800-622-B E S T E n g i n e e r i n g S e r v i c e : 1-800-872-9436/1-800-U S A -W H E N M e x i c o /T E L : 001 (203) 359-1660 F A X : 001 (203) 359-7700L a t i n A m e r i c a :e -m a i l : e s p a n o l @o m e g a .c o mS e r v i c i n g C h i n a :C h i n a :1698 Y i S h a n R o a d , U n i t 102M i n H a n g D i s t r i c tS h a n g h a i , C h i n a 201103 P .R .C . H o t l i n e : 800 819 0559/400 619 0559e -m a i l : i nf o @c n .o m eg a .c o mS e r v i c i n g E u r o p e :B e n e l u x :T o l l -F r e e : 0800 099 3344 T E L : +31 20 347 21 21 F A X : +31 20 643 46 43e -m a i l : s a l e s @o m e g a e n g .n lC z e c h R e p u b l i c :F r y s t a t s k a 184733 01 K a r v i n á, C z e c h R e p u b l i cT E L : +420-59-6311899 F A X : +420-59-6311114 e -m a i l : i n f o @o m e g a s h o p .c zF r a n c e :T o l l -F r e e : 0805 541 038 T E L : 01 57 32 48 17F A X : 01 57 32 48 18e -m a i l : e s a l e s @o m e g a .f rG e r m a n y /A u s t r i a :D a i m l e r s t r a s s e 26D -75392 D e c k e n p f r o n n , G e r m a n yT o l l -F r e e : 0800 8266342 T E L : +49 (0) 7056 9398-0F A X : +49 (0) 7056 9398-29 e -m a i l : i n f o @o m e g a .d eU n i t e r K i n g d o m : O M E G A E n g i n e e r i n g , L t d .I S O 9001 C e r t i fi i e dO n e O m e g a D r i v e , R i v e r B e n d T e c h n o l o g y C e n t r e , N o r t h b a n kI r l a m , M a n c h e s t e r M 44 5B D U n i t e d K i n g d o mT o l l -F r e e : 0800-488-488 T E L : +44 (0) 161 777-6611F A X : +44 (0) 161 777-6622 e -m a i l : s a l e s @o m e g a .c o .u kI t i s t h e p o l i c y o f O M E G A E n g i n e e r i n g , I n c . t o c o m p l y w i t h a l l w o r l d w i d e s a f e r y a n d E M C /E M I r e g u l a t i o n s t h a t a p p l y . O M E G A i s c o n s t a n l y p u r s u i n g c e r t i fi c a t i o n o f i t s p r o d u c t s t o t h e E u r o p e a n N e w A p p r o a c h D i r e c t i v e s . O M E G A w i l l a d d t h e C E m a r k t o e v e r y a p p r o p r i a t e d e v i c e u p o n c e r t i fi c a t i o n .T h e i n f o r m a t i o n c o n t a i n e d i n t h i s d o c u m e n t i s b e l i e v e d t o b e c o r r e c t , b u t O M E G A a c c e p t s n o l i a b i l i t y f o r a n ye r r o r s i t c o n t a i n s , a n d r e s e r v e s t h e r i g h t t o a l t e r s p e c i fi c a t i o n s w i t h o u t n o t i c e .W A R N I N G : T h e s e p r o d u c t s a r e n o t d e s i g n e d f o r u s e i n , a n d s h o u l d n o t b e u s e d , f o r h u m a n a p p l i c a t i o n s .Where Do I Find Everything I Need for Process Measurement and Control?OMEGA... Of Course!Shop online at SMTEMPERATUREThermocouple RTD & Thermister Probes Connectors, Panels & Assemblies Wire: Thermocouple, RTD & Thermister Calibrators & Ice Point References Recorders, Controllers & Process Monitors Infrared PyrometersPRESSURE, STRAIN AND FORCETransducers & Strain Gages Load Cells & Pressure Gages Displacement Transducers Instumentation & AccessoriesFLOW/LEVELRotameters Gas Mass Flowmeters & FlowComputers Air Velocity Indicators Turbine/Paddlewheel Systems Totalizers & Batch ControllersPH/CONDUCTIVITYpH Electrodes Testers & Accessories Benchtop/Laboratory Meters Controllers, Calibrators, Simulators & Pumps Industrial pH & Conductivity EquipmentDATA ACQUISTIONData Acquistion & Engineering Software Communications-Based Acquistion Systems Plug-in Cards for Apple, IBM, & Compatibles Data Logging Systems Recorders, Printers, & PlottersHEATERSHeating Cable Cartridge & Strip Heaters Immersion & Band Heaters Flexible Heaters Laboratory HeatersENVIRONMENTALMONITORING AND CONTROLMetering & Control Instrumentation Refractometers Pumps & Tubing Air, Soil & Water Monitors Industrial Water & Wastewater Treatment pH Conductivity & Dissolved Oxygen InstrumentsOM-EL-ENVIROPAD-TCThermometer With Built-inData Logging and GraphingCopyright Omega Engineering, Inc. 2013 Issue 1 01/13Connecting The ThermocoupleTo turn on simply press the button situated below the screen. To turn off, press and hold the button.There is a thermocouple connector port at the top of the OM-EL-ENVIROPAD-TC logging pad. Insert the thermocouple into this port.The device is configured to a K type probe. If you wish to use a J, N or T type probe select the button and choose the correct probe type.Select the button to record and save temperature readings as and when required.Spot Check MeasurementViewing Previous DataSettingsData LoggingSelect the button to record and save temperature readings at set intervals. Full Set-Up includes selecting sample rate, setting alarms and when you want the device to start recording data Quick Set-Up takes you straight to recording data.Select the button to view previouslysaved data and choose the required file. Data can be viewed in a graphical or table format.Select the button to set temperature units, time, date and probe type.Transfer Data onto a PCRechargingConnect the OM-EL-ENVIROPAD-TC logging pad to the PC via the USB cable provided.The PC will detect that the device has been connected. Locate the files from the OM-EL-ENVIROPAD-TC drive you wish to download and copy them to your PC. Files can be opened in Excel ® for further analysis.The cable provided with the device is used for data transfer and recharging. The OM-EL-ENVIROPAD-TC logging pad will automatically start recharging once it is connected to a PC or USB mains adapter .。
COMPATIBILITY• 564 SS* • 864 TRV* • 864 HH • 864 ST* • 21 DV / TRV* • FPX 44 DV XXL • 36 DV XXL **• DVS Insert EFII (‘08 rev 2) • DVL Insert EFII (‘08 rev 2) • Avalon Prairie* • Avalon Cedar* • Avalon Tree of Life*• Lopi Berkshire* • Lopi Heritage • Lopi Sturbridge* • Lopi Sweet Dreams**Requires Optional Blower**Requires an additional heat shield assembly (part # 250-01073)ITEMS NEEDED FOR ASSEMBLY• Two (2) AAA Batteries (sample batteries are included for set-up)PACKING LISTRemote TransmitterMounting BracketModulating Regulator (with screws, gasket)Torx T-20 Ball-End Wrrench(2) Double-Back Tape (2) Nuts(Sturbridge Only)ANTENNA PLACEMENTThe receiver is shipped with the antenna wrapped around the wiring harness. In most installations, the receiver will work properly with the antenna left in this position. However, if you are experiencing inadequate radio range, you may wish to unwrap the antenna and place it in a position closer to the living area (see the illustration to the right).FCC EQUIPMENT REQUIREMENTSharness and unwrap the wire.WARNING : Changes or modifications to this unit not expressly approved by the party responsible for compliance could void the user's authority to operate the equipment.NOTE : This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radiocommunications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmfulinterference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:•Reorient or relocate the receiver.•Increase the separation between the equipment and receiver.•Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.•Consult the dealer or an experienced radio/TV technician for help.INSTALLATION WARNINGS!Place the remote receiver in the location detailed in these instructions. Placing the receiver in other locations may cause the receiver to become too hot and degrade.!All 110 AC wiring must be done by a qualified electrician and shall be in compliance with local codes and the National Electric Code ANSW/NFPA no. 70 (in the United States).!This kit must be installed by a qualified technician.!Do not connect 110 VAC to the gas control valve or on/off switch.!The remote control is carefully engineered and MUST be installed only as specified. It is tested safe when installed in accordance with this installation manual If you modify it or any of its components, you may possibly cause a fire hazard. It is your responsibility to read all instructions before starting installation and to follow these instructions carefully during installation.!Disconnect the power (turn off the household breaker) and shut off the gas supply to the heater before installing the remote control.Modulating Regulator InstallationHINT : You may wish to loosen the valve mount brackets to allow for better access.Remove the regulator using the included Torx T-20 Ball-End "L" wrench. Make sure to remove and discard the old gasket and spring.Place the modulating regulator (and gasket) on the valve. Insert the three screws included with the regulator into place. Tighten each screw in an alternating pattern to insure the regulator (and gasket) installs flat onto the valve. Fullytighten the screws (25 In.Lb.).NOTE : this illustration shows the gas control valve with the inlet to the left. Certain models may have the valve rotated 180°.Attach the two remote on/off wires (red and brown) from the wiring harness to the top and bottom terminals on the gas control valve (orientation does not matter).Start the main burner and throughly leakcheck the regulator area.Special Instructions for 44 DV, 36 DV, and 864HH (SN 3407-001010 or greater) Installations Without the Power Heat Duct:Remove the two wires currently connected to the snap disk on the fireplace. Attach the two wires labeled "Optional Snap Disk" to the snap disk (orientation does not matter).Installations With the Power Heat Duct:Attach the snap disk included with the power heat duct to the bottom of the firebox. Attach the two wires labeled "Optional Snap Disk" to this snap disk (orientation does not matter).44 DV XXL or 36 DV XL864 HHRemove this cover plate. Usethe screws that held the coverplate in place to secure thesnap disk (included with thepower heat duct) to the fireboxfloor.Receiver Installation – 864 TRV, 864 HH, 864 ST, or 564 SS”.IF NOT USING AN ACCENT LIGHTSecure the two white wires, making sure they do not contact the burner or any moving parts.wish to remove the remote). Attach the molex connector from the receiver to the molex connector on the appliance. Make sure the wires do not contact the burner or any moving parts.Attach the two wires labeled "SOLENOID OPTIONAL" to the modulating regulator (orientation does notmatter).Receiver Installation – 21 DV, 21 TRV, and Sweet Dreams Attach the two wires labeled "SOLENOIDburner or any moving parts (use lock ties if necessary). NOTE: When installing the receiver, make sure to place the receiver with the "Learn" button in a forward position. Before replacing the control cover, make sure to verify the remote works correctly. Once the control cover is installed, the "Learn" button can not be readily accessed.”. IF NOT USING AN ACCENT LIGHT Secure the two white wires, making sure they do not contact the burner or any moving parts.Remove the jumper connector on the wiring harness and place it near the gas control valve (it is required if you wish to remove the remote). Attach the molex connector from the receiver to the molex connector on the appliance.Receiver Installation – 44 DV XXL and 36 DV XLof the fireplace.Receiver Installation – DVS and DVL InsertReceiver Installation –Berkshire, Prairie, and CedarBend the receiver bracket as shown below.Attach the two pieces of double-sided tape to thebracket. Place the receiver as shown on top of the tape.Bend the side tab inwards as shown below.IF NOT USING AN ACCENT LIGHTSecure the two white wires, making sure they do not contact the burner or any moving parts.Bend the receiverbracket as shown below.Attach the two pieces of double-sided tape to thebracket. Place the receiver as shown on top ofthe tape, making sure it is all the way back.Bend the side tab inwardsas shown below.parts).matter).control valve (it is required if you wish to remove the remote). Attach the molexconnector from the receiver to the molex connector on the appliance. Makesure the wires do not contact the burner or any moving parts.Bend the receiverbracket as shown below.Attach the two pieces of double-sided tape to the bracket. Place the receiver as shown on top of the tape.Bend the side tab inwards as shown below.and slide the bracket into place.Accent Light Receiver ConnectionFor those models using the accent light, follow the directions below to connect the accent light to the remote receiver.This will allow you to control the accent light with the remote control.864 TRV, 864 HH, 864 ST, or 564 SSBefore You Begin:Note:The pilot flame must be lit, the gas control valve turned to “ON ” and the on/off switch turned “OFF.”Warning:Read all of the safety precautions in the owner ’s manual included with your heater before using this remote control.Radio Range:Be aware that factors in your home such as florescent lights, microwave ovens, and obstructions can affect radio range. Also, do not place the remote on a metal surface. Before you leave the fireplace unattended while in thermostat mode, test to make sure the fireplace can clearly receive signals from the remote. You can test the remote by turning the fireplace on and off from the location you plan on leaving the remote. See “Antenna Placement ” in the installation instructions for details on improving radio reception.Installing the BatteriesRemove the cover from the back of the transmitter and insert two "AAA" batteries as shown.Insert 2 “AAA ” batteries.Calibrating the Remote to the ReceiverEach remote has a unique identification. To calibrate it to the receiver in the heater, follow the directions below.With the receiver pluggedPress the “MODE ” button on The remote will beep fivetimes to indicate thereceiver is calibrated.Remote Set-Up1Follow step “a” shown below to enter set-up mode.NOTE: At any time you may exit set-upmode by pressing “OK” repeatedly.Use the “UP” and “DOWN”buttons to adjust the settings.“OK” button to 2Press the “UP” or “DOWN” button for each of the settings shown in the table below. When thedesired setting is achieved, press “OK” to accept the setting.Celcius / Fahrenheit Set the remote to display Celcius (“C” will appear next to the temperature) orFahrenheit (“F”).Anticipator The anticipator setting (also called the “lag” or “differential”) is used to keepthe thermostat from turning the heater on and off repeatedly. This setting isset in degrees (S1, S2, S3). It determines at what point above or below thedesired heat setting the thermostat will signal the heater to turn on or off. Thehigher the anticipator setting, the less frequently the heater will turn on andoff. The default setting is S2 (+2° / -2°).NG / LP Change this to the fuel type being used.Clock – Hour Set this to the correct hour (make sure the AM / PM display is correct)Clock- Minute Set this to the correct minute.The Two Modes of OperationThe thermostat can be operated in the following two modes:NOTE: The remote sends a verification signal to the receiver every fifteen minutes. If the transmitter is moved to a location out of range, or the batteries are dead, the heater will shut down after 2 hours unless the remote can re-establish contact with the receiver.Manual (“ON” / “OFF”) Use the remote to turn the heater on and off.HINT: The heater will remain on continuously in manual mode until it is shut off. Use the timerfunction if you wish to have the heater shut off after a certain interval.Press the "MODE" button to turn the heater on and off.NOTE: when the word "THERMO" appears here, the remote is in thermostat mode.Thermostat (“THERMO”) This mode turns the heater on and off automatically to achieve a pre-set temperature. To Start Thermostat Mode:“THERMO” appears.To Adjust the Target Temperature:Use the “UP” and “DOWN” buttons to adjust the targettemperature (“SET”).The heater will turn on and off to keep the roomtemperature near the target temperature.Important Operational Note:The thermostat will turn on and off based upon theAnticipator setting (see “Set-Up” for details).Hint:If your heater turns on and off frequently, adjust the flameheight down slightly for a more consistent heat output.Heater AdjustmentsFlame HeightNOTE: The heater must be onfor this feature to operate.NOTE: The flame adjustmentmay take 5 to 10 seconds for avisible difference in flame size.TO ADJUST FLAME HEIGHT Press the “FLAME”desired setting appears in the display.1 = LOW2 = MEDIUM3 = HIGHFan SpeedNOTE: The fan will not turn onuntil the heater is up totemperature (it will also shutdown once the heater hascooled).NOTE: When the heater is firststarted the default fan speed willbe 1 (“LOW”).NOTE: The fan speed can notbe changed unless the heater ison.TO ADJUST FAN SPEED Press the “FAN” button until the desired setting appears in the display.1 = LOW2 = MEDIUM3 = HIGHOFFAccent LightNOTE: The light will remain onwhether the heater is on or off.Make sure to shut off the accentlight to prevent the light bulbfrom burning out.TO ADJUST ACCENT LIGHTPress the “LIGHT”desired setting appears in thedisplay.1 = LOW2 = MEDIUM3 = HIGHOFFAdditional FeaturesTimedThis feature allows you to set the time you wish the heater to remain on (up to 3 hours).Timed Feature While in Manual Mode: The remote will turn the heater on for the allotted time, after which the heater will shut off.Timed Feature While in Thermostat Mode: If the remote is in thermostat mode, the timer feature will only turn the heater on while the target temperature is higher than room temperature.After the allotted time passes, the remote will turn off and switch to manual mode.NOTE: At any time if you wish to turn off timer, press the “TIMER ” button.Make sure the remote is in the ON positionUse the “UP ” and “DOWN ” buttons to adjust the timer in 10 minute increments. When the desired time is set, do not press any more buttons (or press the “OK ” button) and the timer will automatically start in 5seconds.Child Proof The child proof feature disables the remote transmitter, preventing un-intended operation.WHEN IN CHILD PROOF MODE - No buttons will work, and if you hold down a button for a second, the letters “CP ” will appear.TO TURN OFF CHILD PROOF MODE Press and hold the “FLAME ” andunmarked button for 5 seconds until the letters “CP ” disappear from the display.Additional Features (continued)Power Outages Because the remote utilizes a modulating actuator on the flame height regulator, the flame height will go to 20% during a power outage. To over-ride this, and make the heater burn at 100%,follow the directions below. Use the switch on the heater to turn the heater on and off.the clear plasticregulator coverfragile).Remove the pin heldin this hole.Place the pininto this hole.Low Battery Indicator The remote will display the following indicator when the batteries run low. This indicatesthe batteries have approximately 2 – 4 weeks of operation before the remote will nolonger work.Low Battery IndicatorRemote Failure The remote sends a verification signal to the receiver every fifteen minutes. If thetransmitter is moved to a location out of range, or the batteries are dead, the heater willshut down after 2 hours unless the remote can re-establish contact with the fireplace. Ifusing this remote as a thermostat, remember to check the batteries often.Thermal Safety If the receiver (inside the fireplace or near the stove or insert) reaches a temperature of170° F., it will shut down the heater and start beeping (4 beeps every 2 seconds). It willthen remain off until the temperature lowers to 160° F. At that time the user may turn theheater on again.。
®User’s Gui d e CAUTION! – This productis not intended for medicaluse or use on humansShop online at ®e-mail:**************For latest product manuals:OSAE-SeriesOS-AE11 ModelCompact Fixed IR Sensor with Adjustable Emissivity, 6 Digit LCD a ndAnalog Output®Servicing North America:Omega Engineering, Inc., One Omega Drive, P.O. Box 4047Stamford, CT 06907-0047 USA U.S.A.:ISO 9001 CertifiedToll Free: 1-800-826-6342 FAX: (203) 359-7700976 BergarLaval (Quebec), H7L 5A1 Canada Toll-Free: 1-800-826-6342 FAX: (514) 856-6886TEL: (203) 359-1660e-mail:**************Canada:TEL: (514) 856-6928 e-mail:*************For immediate technical or application assistance:U.S.A. and Canada: Sales Service: 1-800-826-6342/1-800-TC-OMEGA ® Customer Service: 1-800-622-2378/1-800-622-BEST ®Engineering Service: 1-800-872-9436/1-800-USA-WHEN ®Mexico/Latin America: En Español: 001 (203) 359-7803 **************.mxServicing Europe:FAX: 001 (203) 359-7807e-mail:*****************Benelux :Managed by the United Kingdom Office Toll-Free: 0800 099 3344 FAX: +31 20 643 46 43Frystatska 184733 01 Karviná, Czech Republic Toll-Free: 0800-1-66342 FAX: +420-59-6311114TEL: +31 20 347 21 21e-mail:***************** Czech Republic:TEL: +420-59-6311899e-mail:*****************France:Managed by the United Kingdom Office Toll-Free: 0800 466 342 FAX: +33 (0) 130 57 54 27 Daimlerstrasse 26D-75392 Deckenpfronn, GermanyToll-Free************ FAX: +49 (0) 7056 9398-29TEL: +33 (0) 161 37 29 00e-mail:************** Germany/Austria: TEL: +49 (0) 7056 9398-0 e-mail:*************United Kingdom: ISO 9001 CertifiedOMEGA Engineering Ltd.One Omega Drive, River Bend Technology Centre, NorthbankIrlam, Manchester M44 5BD United Kingdom Toll-Free: 0800-488-488 FAX: +44 (0) 161 777-6622TEL: +44 (0) 161 777-6611 e-mail:**************.ukIt is the policy of OMEGA Engineering, Inc. to comply with all worldwide safety and EMC/EMI regulations that apply. OMEGA is constantly pursuing certification of its products to the European New Approach Directives. OMEGA will add the CE mark to every appropriate device upon certification.The information contained in this document is believed to be correct, but OMEGA accepts no liability for any e rrors it contains, and reserves the right to alter specifications without notice.WARNING: These products are not designed for use in, and should not be used for, human applications.OMEGAnet ® Online Service Internet e-mail **************The OSAE-Series is a non-contact infrared temperature sensor. The electronics are protected by a rugged IP65/NEMA 4 aluminum alloy(A6061) housing. They calculate the surface temperature based on the emitted infrared energy of objects and convert the energy into temperature signal. 1. Scope of Delivery • OSAE-Series Sensor• Mounting nut x 2• 3m connection cable standard • User manual2. MaintenanceKeep the lens clean at all times. Any foreign matter on the lens would affect measurement accuracy. Blow off loose particles using clean compressed air. The lens surface can be cleaned with a soft, humid tissue moistened with water or a water-based glass cleaner. Never use cleaning compounds which contain solvents for the lens.3. Electrical InterferenceKeep away from strong EMF. Avoid static electricity, arc welders, and induction heaters. Avoid abrupt changes of the ambient temperature. To avoid ground loops, make sure that only one point is earth grounded.4. Technical DataMeasurement SpecificationsTemperature Range 0ºC ~500ºC (LT) Optics Resolution Response Time Spectral response Accuracy*¹ Repeatability*¹EmissivityD:S = 20:1 (90% energy) 150ms (95%)8~14 μm ±1% of reading or ±1.5ºC, which is greater ±0.5% of reading or ±1ºC, which is greater 0.100~1.000Electrical Specifications 24 VDC ±20%, < 100 mA 4~20mA10 KΩ (V) 500 Ω (I)Power Supply Analog OutputMinimum Impedance Load Maximum Loop ResistanceGeneral Specifications Environmental Rating Ambient Temperature Storage Temperature Relative Humidity Cable Temperature Cable Length WeightIP 65 (NEMA-4) 0ºC ~70ºC -20ºC ~85ºC10%~95%, non-condensing -20ºC ~80ºC3 m (standard), 5m or 10m 200gAt 23ºC ± 5ºC emissivity = 0.955. Optical ChartThe optical diagrams indicate the target spot diameter at any given distance between the target object and the sensing head. The spot size will change in longer distance corresponding to the following drawing. In order to prevent measuring errors the object must be as least as big as the spot size.OS-AE11 Model6. Dimensions7. AccessoriesOS- FMB OS-AMB8. InstallationMechanical InstallationThe OSAE-Series sensors come with a standard 3 m cable and 2 mounting nuts. You can mount the sensor in brackets or cutouts of your own design. For easy mounting and aligning the sensor to the measured object a fixed or adjustable mounting bracket is available. Wiring9. OperationLCD displayDown/SelectCable connectorUp/ModeSensor Setup :1. Pressing the up (∧) key and down (∨) keys simultaneously to enter setup function.2. Press the up (∧) key to select the functional parameter.3. Press the down (∨) key, when a (-) symbol appears at the right side of the selected function confirming Setting Mode.4. Press the down (∨) or up (∧) key to setup the functional parameter.5. No action for 7 seconds forces the unit to leave the Setting Mode and save the parameter.WARRANTY/DISCLAIMER OMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month grace period to the normal one (1) year product warranty to cover handling and shipping time. This ensures that OMEGA’s customers receive maximum coverage on each product.If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service Department will issue an Authorized Return (AR) number immediately upon phone or written request. Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no charge. OMEGA’s WARRANTY does not apply to defects resulting from any action of the purchaser, including but not limited to mishandling, improper interfacing, operation outside of design limits, improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of having been tampered with or shows evidence of having been damaged as a result of excessive corrosion; or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating conditions outside of OMEGA’s control. Components in which wear is not warranted, include but are not l imited to contact points, fuses, and triacs.OMEGA is pleased to offer suggestions on the use of its various products. However, OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any damages that result from the use of its products in accordance with information provided by OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by the company will be as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESSED OR IMPLIED, EXCEPT THAT OF TITLE, AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OFLIABILITY: The remedies of purchaser set forth herein are exclusive, and the total liability of OMEGA with respect to this order, whether based on contract, warranty, negligence, indemnification, strict liability or otherwise, shall not exceed the purchase price of the component upon which liability is based. In no event shall OMEGA be liable for consequential, incidental or special damages.CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic Component” under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical applications or used on humans. Should any Product(s) be used in or with any nuclear installation or activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility as set forth in our basic WARRANTY/DISCLAIMER language, and, additionally, purchaser will indemnify OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the P roduct(s) in such a manner. RETURN REQUESTS/INQUIRIES Direct all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN AUTHORIZED RETURN (AR) NUMBER FROM OMEGA’S CUSTOMER SERVICE DEPARTMENT (IN ORDER TO AVOIDPROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return package and on any correspondence.The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent breakage in transit.FOR WARRANTY RETURNS, please have the following information available BEFORE contacting OMEGA: FOR NON-WARRANTY REPAIRS, consult OMEGA for current repair charges. Have the following information available BEFORE contacting OMEGA: 1. Purchase Order number to cover the COST o f the repair, 2. Model and serial number of the product, and 3. Repair instructions and/or specific problems relative to the product. 1. Purchase Order number under which the product was PURCHASED, Model and serial number of the product under warranty, and Repair instructions and/or specific problems relative to the product.2. 3. OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords o ur customers the latest in technology and engineering.OMEGA is a registered trademark of OMEGA ENGINEERING, INC.© Copyright 2011 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the prior written consent of OMEGA ENGINEERING, INC.Where Do I Find Everything I Need for Process Measurement and Control?OMEGA…Of Course!Shop online at SM TEMPERATUREThermocouple, RTD & Thermistor Probes, Connectors, Panels & Assemblies Wire: Thermocouple, RTD & ThermistorCalibrators & Ice Point ReferencesRecorders, Controllers & Process MonitorsInfrared PyrometersPRESSURE, STRAIN AND FORCETransducers & Strain GagesLoad Cells & Pressure GagesDisplacement TransducersInstrumentation & AccessoriesFLOW/LEVELRotameters, Gas Mass Flowmeters & Flow ComputersAir Velocity IndicatorsTurbine/Paddlewheel SystemsTotalizers & Batch ControllerspH/CONDUCTIVITYpH Electrodes, Testers & AccessoriesBenchtop/Laboratory MetersControllers, Calibrators, Simulators & PumpsIndustrial pH & Conductivity EquipmentDATA ACQUISITIONData Acquisition & Engineering SoftwareCommunications-Based Acquisition SystemsPlug-in Cards for Apple, IBM & CompatiblesData Logging SystemsRecorders, Printers & PlottersHEATERSHeating CableCartridge & Strip HeatersImmersion & Band HeatersFlexible HeatersLaboratory HeatersENVIRONMENTAL MONITORINGAND CONTROLMetering & Control InstrumentationRefractometersPumps & TubingAir, Soil & Water MonitorsIndustrial Water & Wastewater TreatmentpH, Conductivity & Dissolved Oxygen Instruments。
Using This Quick Start Manual
Use this Quick Start Manual to set up your RTD meter and begin operation. Information is provided on how to:•Connect ac power •Connect the RTD •Set basic options for operation
characters shown are for the “B” version.
Before You Begin
In addition to the meter and the related parts, you will need the following items to set up your meter:•ac power, as listed on meter’s ID/Power Label •RTD •1/8” flat blade screwdriver
Safety Consideration
accordance with EN61010-1 (Safety requirements for
electrical equipment for measurement, control, and laboratory standard). Remember that the unit has no power-on switch.Building installation should include a switch or circuit-breaker that must be compliant to IEC 947-1 and 947-3.
SAFETY:
•Do not exceed voltage rating on the label located on the top of the instrument housing.
•Always disconnect power before changing signal and power connections.
•Do not use this instrument on a work bench without its case for safety reasons.
•Do not operate this instrument in flammable or explosive atmospheres.
•Do not expose this instrument to rain or moisture.EMC:
•Whenever EMC is an issue, always use shielded cables. •Never run signal and power wires in the same conduit.•Use signal wire connections with twisted-pair cables.•Install Ferrite Bead(s) on signal wire close to the instrument if EMC problems persist.
Mount the Unit
1.Cut a panel opening using the dimensions shown to the right.
2.Position the unit in the opening, making sure the front bezel gasket is flush with the panel.
3.Slide on retaining bracket to secure the meter against the panel.
2
3
4
5
6
DP25B-RTD and DP25-RTD
Programmable Digital RTD Meter
MQS3733/0206
It is the policy of OMEGA to comply with all worldwide safety and EMC/EMI regulations that apply. OMEGA is constantly pursuing certification of its products to the European New Approach Directives. OMEGA will add the CE mark to every appropriate device upon certification.
The information contained in this document is believed to be correct but OMEGA Engineering, Inc. accepts no liability for any errors it contains, and reserves the right to alter specifications without notice.
TRADEMARK NOTICE:
®
®, and
,
are trademarks of OMEGA WARNING:These products are not designed for use in, and should not be used for, patient connected applications.
Engineering, Inc.。