三菱伺服电机怎样回原点
- 格式:docx
- 大小:14.51 KB
- 文档页数:3
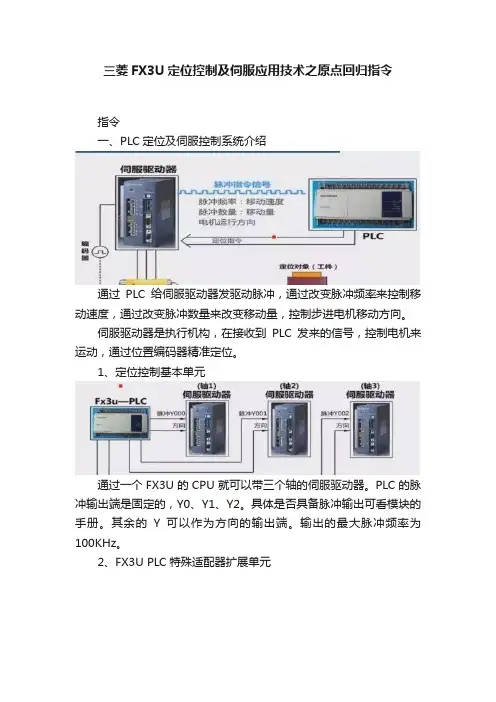
三菱FX3U定位控制及伺服应用技术之原点回归指令指令一、PLC定位及伺服控制系统介绍通过PLC给伺服驱动器发驱动脉冲,通过改变脉冲频率来控制移动速度,通过改变脉冲数量来改变移动量,控制步进电机移动方向。
伺服驱动器是执行机构,在接收到PLC发来的信号,控制电机来运动,通过位置编码器精准定位。
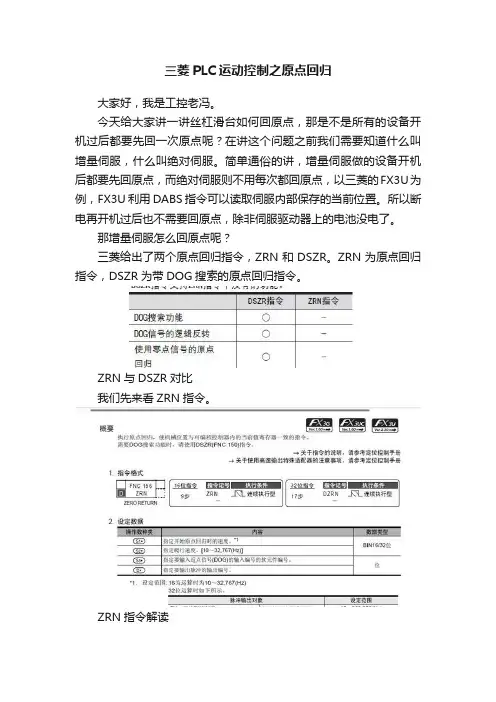
1、定位控制基本单元通过一个FX3U的CPU就可以带三个轴的伺服驱动器。
PLC的脉冲输出端是固定的,Y0、Y1、Y2。
具体是否具备脉冲输出可看模块的手册。
其余的Y可以作为方向的输出端。
输出的最大脉冲频率为100KHz。
2、FX3U PLC特殊适配器扩展单元基本单元的脉冲输出Y不起作用,只能用特殊适配器扩展单元的输入Y来输出脉冲。
3、PLC输入端内部电路(漏型输入)4、PLC输出端内部电路Y0可以提供脉冲频率和脉冲数量。
利用Y4输出方向。
由定位指令来实现,不需要单独编程Y4.二、FX3U-PLC定位控制指令(一)、原点回归指令:ZRN首先以S1的速度快速运动,当到近点S3后切换到爬行速度S2,D为输出。
只能在原点的正方向才能使用原点回归指令,在反向是不能使用ZRN指令的。
2、原点回归指令ZRN运行过程3、原点回归指令ZRN,速度变化过程及清零信号说明1)Y0脉冲输出端的清零信号选择(1)M8341=ON;清零信号有效M8464=OFF;清零信号输出端固定有效Y4--清零信号固定输出端。
2)Y0脉冲输出端的清零信号选择(2)M8341=ON;清零信号有效M8464=ON;清零信号输出指定有效D8464--清零信号指定寄存器。
例:上图中当执行条件满足,将M8341=1,M8464=1,将Y20送到D8464.注意:若设置H0028,对应的Y028,由于没有Y028,则出现运算错误。
3)清零信号输出端固定(与脉冲输出端一致性)4)清零信号输出端可指定(可任意选择)4、定位指令的最高速度设定最高速度限定了PLC输出最高脉冲频率,为定位指令的上线频率。
三菱PLC运动控制之原点回归大家好,我是工控老冯。
今天给大家讲一讲丝杠滑台如何回原点,那是不是所有的设备开机过后都要先回一次原点呢?在讲这个问题之前我们需要知道什么叫增量伺服,什么叫绝对伺服。
简单通俗的讲,增量伺服做的设备开机后都要先回原点,而绝对伺服则不用每次都回原点,以三菱的FX3U为例,FX3U利用DABS指令可以读取伺服内部保存的当前位置。
所以断电再开机过后也不需要回原点,除非伺服驱动器上的电池没电了。
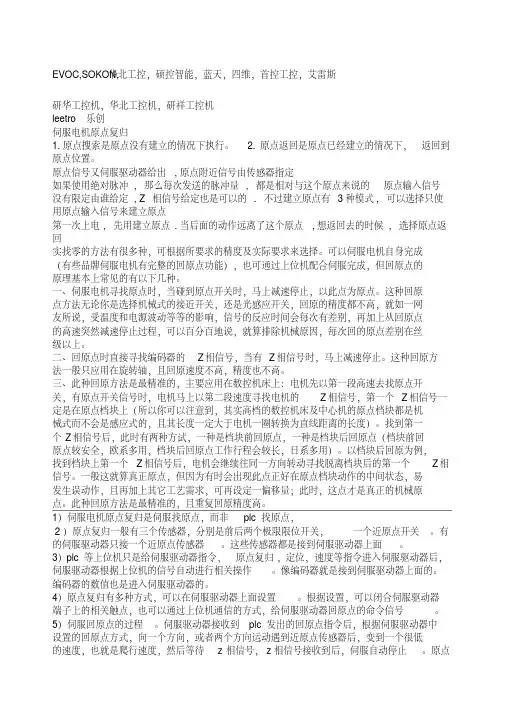
那增量伺服怎么回原点呢?三菱给出了两个原点回归指令,ZRN和DSZR。
ZRN为原点回归指令,DSZR为带DOG搜索的原点回归指令。
ZRN与DSZR对比我们先来看ZRN指令。
ZRN指令解读我们以如下这段小程序为例。
ZRN回原点机械当按下M0的时候,Y0控制的伺服开始回原点,方向默认为当前值寄存器减少的方向,也就是图中的左方向。
其中X0为原点sensor,工作台先以D800的速度往左移动,当X0感应到工作台时,再以D802继续往左移动,知道X0感应不到工作台时,工作台马上停止。
此时当前值寄存器会自动清理,回原点指令执行完成。
ZRN指令执行时序可能有些朋友已经发现问题所在了,那如果工作台在X0的左边,工作台一开始就往左走,那它岂不是一辈子都找不到X0了,它的命运只有撞机。
所以三菱推出了带DOG搜素的原点回归指令。
当然,我们也可以不用这个指令,可以自己写程序来规避这种撞机情况,怎么写我们以后再讲。
我们来看一下DSZR指令。
DSZR指令解读我们同样以一段小程序为例。
参数设置正反转极限设定DSZR回原点DSZR执行时序图如果是这个程序不管工作台在哪个位置,都可以安全的回到原点。
下图说明了因为机台位置不同指令执行的情况。
感兴趣的朋友可以好好理解一下。
本文只是浅析了一下原点回归指令的用法,至于里面的很多特殊寄存器,特殊标志位,因为内容过于庞大,无法一一为大家解析。
后面老冯会以视频教程的方式为大家讲解三菱PLC整个运动控制的所有内容。
伺服电机原点回归方式
伺服电机原点回归方式有以下几种:
1. 硬件回归方式:通过在伺服电机上安装原点开关或光电传感器,在机械结构到达指定位置时触发开关或传感器,从而确定伺服电机的原点位置。
2. 软件回归方式:通过编写控制程序,在运动过程中监测电机位置,当检测到电机位置达到指定位置时,将该位置定义为原点。
3. 索引方式:部分伺服电机具有索引功能,可以通过索引信号确定原点位置。
索引信号通常由光电编码器或霍尔传感器提供,在旋转一周后,当索引信号出现时,可以确定电机的原点位置。
4. 零位标定方式:通过给伺服电机指定一个参考点,然后在运动过程中记录电机的位置,当电机位置回到参考点时,即可确定原点位置。
这些原点回归方式可以根据具体应用需求进行选择和组合使用。
EVOC,SOKON,华北工控,硕控智能,蓝天,四维,首控工控,艾雷斯研华工控机,华北工控机,研祥工控机leetro乐创伺服电机原点复归1.原点搜索是原点没有建立的情况下执行。
2.原点返回是原点已经建立的情况下,返回到原点位置。
原点信号又伺服驱动器给出,原点附近信号由传感器指定如果使用绝对脉冲, 那么每次发送的脉冲量, 都是相对与这个原点来说的原点输入信号没有限定由谁给定, Z相信号给定也是可以的. 不过建立原点有3种模式, 可以选择只使用原点输入信号来建立原点第一次上电, 先用建立原点.当后面的动作远离了这个原点,想返回去的时候, 选择原点返回实找零的方法有很多种,可根据所要求的精度及实际要求来选择。
可以伺服电机自身完成(有些品牌伺服电机有完整的回原点功能),也可通过上位机配合伺服完成,但回原点的原理基本上常见的有以下几种。
一、伺服电机寻找原点时,当碰到原点开关时,马上减速停止,以此点为原点。
这种回原点方法无论你是选择机械式的接近开关,还是光感应开关,回原的精度都不高,就如一网友所说,受温度和电源波动等等的影响,信号的反应时间会每次有差别,再加上从回原点的高速突然减速停止过程,可以百分百地说,就算排除机械原因,每次回的原点差别在丝级以上。
二、回原点时直接寻找编码器的Z相信号,当有Z相信号时,马上减速停止。
这种回原方法一般只应用在旋转轴,且回原速度不高,精度也不高。
三、此种回原方法是最精准的,主要应用在数控机床上:电机先以第一段高速去找原点开关,有原点开关信号时,电机马上以第二段速度寻找电机的Z相信号,第一个Z相信号一定是在原点档块上(所以你可以注意到,其实高档的数控机床及中心机的原点档块都是机械式而不会是感应式的,且其长度一定大于电机一圈转换为直线距离的长度)。
找到第一个Z相信号后,此时有两种方试,一种是档块前回原点,一种是档块后回原点(档块前回原点较安全,欧系多用,档块后回原点工作行程会较长,日系多用)。
fx3u回原点指令
FX3U PLC(可编程逻辑控制器)是三菱电机生产的一种常见的PLC型号。
要实现回原点指令,通常需要使用特定的指令或功能模块。
在FX3U PLC中,回原点指令通常用于控制步进电机或伺服电机
等执行器回到初始位置。
以下是一些可能的方法来实现回原点指令:
1. 使用特定的运动控制功能模块,FX3U PLC通常支持运动控
制功能模块,例如FX3U-20SSC-H等。
这些功能模块可以与步进电机
或伺服电机配合使用,通过特定的指令来实现回原点操作。
2. 编写自定义的回原点程序,在FX3U PLC的编程软件中(如GX Works2),可以编写自定义的回原点程序。
这通常涉及到使用特
定的运动控制指令或者对执行器进行位置控制,以使其回到初始位置。
3. 使用PLC内置的位置控制指令,一些FX3U PLC可能具有内
置的位置控制指令,可以直接用于实现回原点操作。
这些指令通常
包括设置目标位置、启动运动、监视位置等功能。
无论采用哪种方法,实现回原点指令都需要考虑到具体的执行
器类型、运动控制要求以及安全性等因素。
在实际应用中,还需要考虑到PLC与执行器的通讯方式、传感器的使用以及异常情况的处理等方面。
希望以上信息能够对你有所帮助。
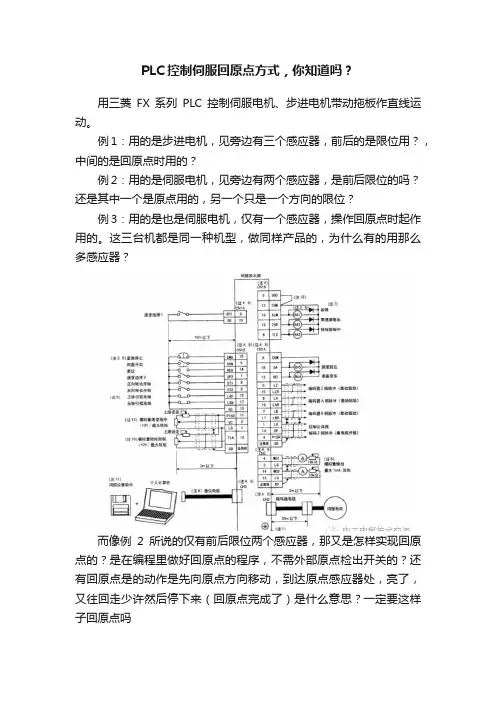
PLC控制伺服回原点方式,你知道吗?用三菱FX系列PLC控制伺服电机、步进电机带动拖板作直线运动。
例1:用的是步进电机,见旁边有三个感应器,前后的是限位用?,中间的是回原点时用的?例2:用的是伺服电机,见旁边有两个感应器,是前后限位的吗?还是其中一个是原点用的,另一个只是一个方向的限位?例3:用的是也是伺服电机,仅有一个感应器,操作回原点时起作用的。
这三台机都是同一种机型,做同样产品的,为什么有的用那么多感应器?而像例2所说的仅有前后限位两个感应器,那又是怎样实现回原点的?是在编程里做好回原点的程序,不需外部原点检出开关的?还有回原点是的动作是先向原点方向移动,到达原点感应器处,亮了,又往回走少许然后停下来(回原点完成了)是什么意思?一定要这样子回原点吗这原点开关是必须要还是可以省略的A电友回复:1.我写过像例1那样的伺服程序,2个限位的,中间一个原点。
2.第2个没有接触到,估计2个传感器是限位的,原位置应该是PLC程序里面控制吧。
3.回原位置过了传感器后很快又回来,这是在写的PLC程序控制,回原位置的方式,方向,速度,等都是程序控制的,具体看你怎么用,我一般都是等传感器亮了后再迅速返回。
B电友回复:回原点根据硬件有很多方法。
比如三个反馈信号,可能是一个限位一个零点接近一个零点如过是中间那个是原点的话,最后那个是限位,开始那个是原点接近信号,当运动到原点接近信号的时候,电机就减速,到原点信号停止。
如果是两个信号可能是没有限位,如果是一个信号就是用一个信号做原点,没有原点接近信号,这些方法都可以实现功能,只不过三个信号的最可靠,伺服电机的原点不一定非得用外部输入信号,本身的z相也可以做原点输入,你说的回转回原点是一种寻原点的方式,不一定非得那么用,跟伺服的设置有关,比如是cw方向还是ccw方向,总之很多种方法,具体用哪种看条件和使用环境了。
伺服电机回原点按机床检测元件检测原点信号方式的不同,返回机床参考点的方法有两种。
一种为栅点法,另一种为磁开关法。
在栅点法中,检测器随着电机一转信号同时产生一个栅点或一个零位脉冲,在机械本体上安装一个减速撞块及一个减速开关后,数控系统检测到的第一个栅点或零位信号即为原点。
在磁开关法中,在机械本体上安装磁铁及磁感应原点开关,当磁感应原点开关检测到原点信号后,伺服电机立即停止,该停止点被认作原点。
栅点方法的特点是如果接近原点速度小于某一固定值,则伺服电机总是停止于同一点,也就是说,在进行回原点操作后,机床原点的保持性好。
磁开关法的特点是软件及硬件简单,但原点位置随着伺服电机速度的变化而成比例地漂移,即原点不确定。
目前,几乎所有的机床都采用栅点法。
使用栅点法回机床原点的几种情形如下:1.使用增量检测反馈元件的机床开机后的第一次回机床原点;2.使用绝对式检测反馈元件的机床安装后调试时第一次机床开机回原点;3.栅点偏移量参数设置调整后机床第一次手动回原点。
按照检测元件测量方式的不同分为以绝对脉冲编码器方式归零和以增量脉冲编码器方式归零。
在使用绝对脉冲编码器作为测量反馈元件的系统中,机床调试前第一次开机后,通过参数设置配合机床回零操作调整到合适的参考点后,只要绝对脉冲编码器的后备电池有效,此后的每次开机,不必进行回参考点操作。
在使用增量脉冲编码器的系统中,回参考点有两种模式,一种为开机后在参考点回零模式各轴手动回原点,每一次开机后都要进行手动回原点操作;另一种为使用过程中,在存储器模式下的用G代码指令回原点。
使用增量式脉冲编码器作为测量反馈元件的机床开机手动回原点的动作过程一般有以下三种:1.手动回原点时,回原点轴先以参数设置的快速进给速度向原点方向移动,当原点减速撞块压下原点减速开关时,伺服电机减速至由参数设置的原点接近速度继续向前移动,当减速撞块释放原点减速开关后,数控系统检测到编码器发出的第一个栅点或零标志信号时,归零轴停止,此停止点即为机床参考点。
伺服电机原点回归方式、原理以及作用伺服电机原点回归问题1. 伺服回零的作用零点位置是通过程序复位控制回零或者在回零过程中感应到原点限位的时候,把当前位置值清零,表示原点或零点,一切位置都是以原点为基础,确定零点位置的时候,应先确定运动的正向和负向,以及电机的实际运动方向。
2. 伺服回零情况2.1 原点搜索是原点没有建立的情况下执行。
2.2 原点返回是原点已经建立的情况下,返回到原点位置。
第一次上电先用建立原点,当后面的动作远离了这个原点,想返回去的时候,选择原点返回。
2.3 一般来说,伺服电机的编码器有两种,绝对值编码器和增量式编码器.绝对值编码器断电可以保持,只要电池还有电,是不需要寻原点的;增量式编码器由于断电后会丢失电机多圈数值,故需要寻原点操作。
3. 伺服启动的初始定位3.1 伺服定位原理3.1.1 伺服系统不允许系统在没有任何准备的情况下使电机旋转。
电机转子在任何位置永磁伺服系统都能准确定位,定位时间很短,最多经过十多次的定位试探,电机转子就能咬合。
运行中利用光电编码盘的Z 信号对电机反馈脉冲进行修正。
3.1.2 对矢量控制的分析,当输出电流矢量与转子轴不重合时,电机转子会转动到该处并与定子输出电流矢量方向重合。
基于这种控制思想来对转子初始位置进行检测。
伺服系统中采用Z脉冲作为复位信号,因此必须知道该信号产生的位置和定子a相轴线的夹角,而这一夹角取决于光电编码器的安装位置。
3.1.3 由于光电编码盘的安装问题, 常常使Z脉冲的位置和定子a 相轴线不重合, 此时需要先进行调零处理。
可以分为硬件和软件的调零;硬件调零就是通过旋转光电码盘的位置, 使Z脉冲出现的位置与定子a 相轴线重合;软件调零可以检测出Z脉冲的位置和定子 a相轴线的夹角, 并进行软件补偿。
3.2 启动初始定位的作用:电机伺服系统离不开对转子位置(或磁场)的检测和初始定位。
只有检测到初始转子实际位置后,控制系统才能正常工作。
三菱伺服电机怎样回原点工业高度发达的今天,已经是信息时代,每天大量的信息涌入我们的脑海,总有太多了解不透的东西。
现在行业越来越细分,隔行如隔山,不管在哪个小领域,只要我们做的足够好,总是会有立足之地。
三菱伺服电机也是比较专业的设备,很多问题都要专业的人才能解决。
随着工业的发展,三菱伺服电机运用的领域也很多。
可以用于工作机械和一般工业机械等需要高精度位置控制和平稳速度控制的应用,也可用于速度控制和张力控制的领域。
在使用三菱伺服电机时也常会碰到一些问题,如三菱伺服电机hc-kfs23怎样回原点?工程师是想此电机断电后,我人为转动丝杆到任何位置,再上电。
伺服电机仍可准确找到原点位置,没有任何外部原电接近开关。
要实现这个功能,大家给出的建议是,要使用绝对位置系统,它会记得我们的绝对原点位置。
但要求在驱动器里装锂电池,来保存位置数据。
如果没有电池保证供电,伺服电机没有电源,也就没办法记住原点的位置,三菱伺服电机怎样回原点解决办法要看具体原因。
有时我们会遇到更麻烦的问题,三菱伺服电机怎样回原点,一位工程师用了一套三菱伺服系统(FX-2N的PLC,FX2N-1PG,MR-E伺服,三菱HC-KF电机),使用时候,按照说明编写程序开机找原点,出现的问题是,到了原点感应器后,1PG立即反向运行不停止,直到驱动器报警,到极限感应器也不停止。
这问题得好好分析一下,只有理清思路才能解决问题。
三菱伺服电机怎样回原点这个问题,感觉应该是在转动的过程中,没有找到零点的脉冲。
到极限也不停止,一个要看你极限开关的信号进入系统有没有,系统有没有检测到,还要看你编程对不对,编程时我们有时因为一个小小的细节没注意,当它反应出来时就会是个大问题,我们写程序时一定要仔细检查两遍。
不要等到后面出了问题再到处找原因,三菱伺服电机怎样回原点这个问题是不复杂的。
程序执行原点回位后,接受到了PGO信号后,1PG立即输出反向脉冲。
一直运转,到了极限感应器不停止,程序接收到极限感应器信号了,但是1PG的信号没有清0,一直有回原点的反向输出,驱动器报警了还在输出。
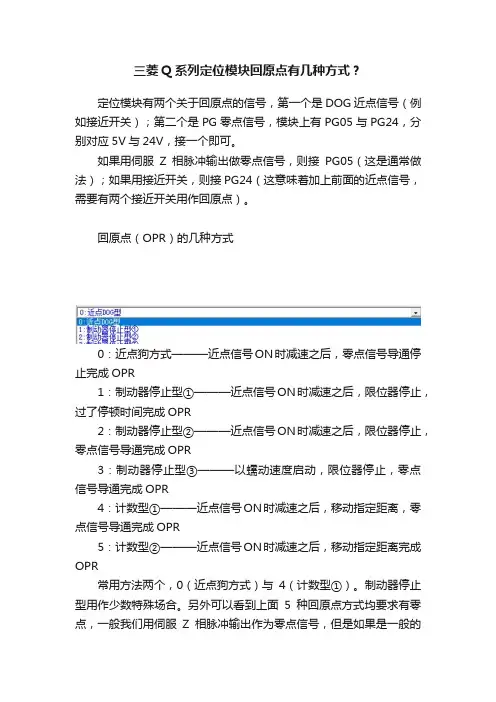
三菱Q系列定位模块回原点有几种方式?定位模块有两个关于回原点的信号,第一个是DOG近点信号(例如接近开关);第二个是PG零点信号,模块上有PG05与PG24,分别对应5V与24V,接一个即可。
如果用伺服Z相脉冲输出做零点信号,则接PG05(这是通常做法);如果用接近开关,则接PG24(这意味着加上前面的近点信号,需要有两个接近开关用作回原点)。
回原点(OPR)的几种方式0:近点狗方式———近点信号ON时减速之后,零点信号导通停止完成OPR1:制动器停止型①———近点信号ON时减速之后,限位器停止,过了停顿时间完成OPR2:制动器停止型②———近点信号ON时减速之后,限位器停止,零点信号导通完成OPR3:制动器停止型③———以蠕动速度启动,限位器停止,零点信号导通完成OPR4:计数型①———近点信号ON时减速之后,移动指定距离,零点信号导通完成OPR5:计数型②———近点信号ON时减速之后,移动指定距离完成OPR常用方法两个,0(近点狗方式)与4(计数型①)。
制动器停止型用作少数特殊场合。
另外可以看到上面5种回原点方式均要求有零点,一般我们用伺服Z相脉冲输出作为零点信号,但是如果是一般的步进电机,不加编码器,显然没有所谓的Z相脉冲,同时不愿意多加一个接近开关作为零点信号,那此时就可以使用计数型②,这是唯一不需要零点信号的回原点方式。
我们具体介绍三种回原点方式:近点狗、计数型①、计数型②参数设定近点狗方式:如图所示,默认方式为近点DOG型,我们要修改的仅仅为原点回归速度(减速之前的速度),以及爬行速度(减速之后的速度),同时原点回归重试建议选择进行原点回归重试,否则将不会带搜索功能,即碰到限位自动反转重新找原点。
计数型①:如图所示,除了将原点回归方式修改之外,还有一个参数——近点DOG ON后的移动量设置。
意思是当碰到近点信号后,再移动2000脉冲,然后零点信号导通后停止。
计数型②:与计数型①相比,参数除了回归方式改一下,其他没有区别。
伺服电机找原点原理引言伺服电机是一种能够根据控制信号调整输出角度和速度的电机。
在实际应用中,经常需要将伺服电机的位置重置到一个已知的位置,这个位置通常被称为原点。
找到原点的过程被称为伺服电机找原点。
伺服电机找原点是实现自动化控制的基础,它在许多领域中得到广泛应用,比如机械加工、印刷、纺织等。
本文将详细解释与伺服电机找原点原理相关的基本原理,以及如何实现伺服电机找原点。
伺服电机工作原理在深入理解伺服电机找原点原理之前,我们先简要介绍一下伺服电机的工作原理。
伺服电机由电机、编码器和控制器组成。
电机负责产生转动力矩,编码器用于测量电机的角度,控制器根据编码器的反馈信号来调整电机的输出角度和速度。
控制器通过给电机施加适当的电压信号来驱动电机转动。
电机转动时,编码器会输出与电机角度相关的脉冲信号。
控制器根据编码器信号来判断电机当前的位置,并通过调整输出电压信号来使电机转到目标位置。
伺服电机找原点原理伺服电机找原点的目的是将电机的位置重置到一个已知的位置,通常是某个固定的位置。
找到原点后,控制器可以根据原点位置来计算电机当前的位置。
伺服电机找原点的基本原理是通过控制电机的转动方向和速度,使电机在某个特定的位置上产生一个特殊的信号,然后根据这个信号来确定原点位置。
具体来说,伺服电机找原点的过程可以分为以下几个步骤:1.初始化:在开始找原点之前,需要对系统进行初始化。
这包括将控制器的输出电压设置为零,将电机的位置清零,以及将编码器的计数器清零。
2.设定转动方向和速度:在开始找原点之前,需要设定电机的转动方向和速度。
通常情况下,电机会以一个较低的速度逆时针转动,直到找到原点为止。
3.检测特殊信号:当电机转动到一个特定的位置时,通常会产生一个特殊的信号。
这个信号可以通过传感器来检测,比如光电开关、接近开关等。
当检测到特殊信号时,说明电机已经找到了原点。
4.停止电机:一旦检测到特殊信号,控制器会停止给电机施加电压信号,使电机停止转动。
伺服运动控制的原点回归及⽅式原点回归,⼜名原点复位、伺服回零...等等。
在进⾏伺服定位操作之前⼀般都需要先进⾏原点回归,否则伺服电机可能会罢⼯,说是在「原点回归未完成时启动」。
那么,为什么要进⾏原点回归?以及,怎样进⾏原点回归的操作呢?1、原点回归的必要性所谓定位,就是要让伺服电机⾛到⼀个确定的位置。
这个位置可以是增量式的,也可以是绝对式的。
打个⽐⽅,我们现在在路上,我们要往前⾛ 10 ⽶,相当于我们的位置要往前增加⼗⽶,这个⼗⽶就是⼀个位置增量。
⽽如果我们要去这条街上某处地⽅的咖啡店,我们就需要知道它的确切地址,假设这条街的地址不是门牌号,⽽是从街的⼀端开始为 0 ⽶(基准位置)。
这样就能确定这条街上每个位置的地址,⽐如这家咖啡店的地址是这条街 100 ⽶的位置,那么这个 100 ⽶就是⼀个绝对位置,我们不管在哪⼀个位置,都能通过⾛到这条街 100 ⽶的位置找到这家咖啡店。
在定位指令⾥,就分为增量式的 INC 指令和绝对式的 ABS 指令。
增量(INC)⽅式以当前停⽌的位置为起点,指定移动⽅向和移动量后进⾏定位。
起点地址为5000,移动量为-7000时,对-2000的位置进⾏定位。
绝对值(ABS)⽅式定位到指定的地址,该地址是以原点为基准的位置。
起点地址(当前的停⽌位置)为1000,终点地址(定位地址)为8000时,向正⽅向进⾏移动量7000(8000-1000)的定位。
所以,当我们需要进⾏绝对式定位时,我们就需要对应的机械系统上具有地址,这也就需要⼀个基准位置,通过这个基准位置去确定机械系统上的每个位置的地址。
⽽这个基准位置,在伺服定位系统⾥称为原点。
2 两个信号在三菱的伺服定位系统⾥,有两个关于原点的关键信号:原点回归请求信号(原点复位请求标志)这个信号 ON 的时候,说明伺服系统⽬前没有原点,需要进⾏原点回归。
原点回归完成信号(原点复位完成标志)当原点回归执⾏完成时,该信号会 ON。
然后如果执⾏定位或者其他正常⽅式使得伺服电机离开原点位置时,该信号会 OFF,但是此时原点还是存在的。
伺服电机回零不用怕,我教你三种方法回零是伺服控制的一个大课题。
系统对回零的要求各种各样,各厂家的运动控制器或驱动器支持的回零方式各不相同,且伺服电机也有多种反馈类型,由此衍生出多种回零方式。
另,各厂家对与回零相关的关键术语的描述也不尽相同,因此,有很多与伺服回零相关的话题和讨论。
实找零的方法有很多种,可根据所要求的精度及实际要求来选择。
可以伺服电机自身完成(有些品牌伺服电机有完整的回原点功能),也可通过上位机配合伺服完成,但回原点的原理基本上常见的有以下几种。
一、伺服电机寻找原点时,当碰到原点开关时,马上减速停止,以此点为原点。
这种回原点方法无论你是选择机械式的接近开关,还是光感应开关,回原点的精度都不高,就如一网友所说,受温度和电源波动等等的影响,信号的反应时间会每次有差别,再加上从回原点的高速突然减速停止过程,可以百分百地说,就算排除机械原因,每次回的原点差别在丝级以上。
二、回原点时直接寻找编码器的Z相信号,当有Z相信号时,马上减速停止。
这种回原方法一般只应用在旋转轴上,且回原速度不高,精度也不高。
三、此种回原方法是最精准的,主要应用在数控机床上:电机先以第一段高速去找原点开关,有原点开关信号时,电机马上以第二段速度寻找电机的Z相信号,第一个Z相信号一定是在原点档块上(所以你可以注意到,其实高档的数控机床及中心机的原点档块都是机械式而不会是感应式的,且其长度一定大于电机一圈转换为直线距离的长度)。
找到第一个Z相信号后,此时有两种方试,一种是档块前回原点,一种是档块后回原点(档块前回原点较安全,欧系多用,档块后回原点工作行程会较长,日系多用)。
以档块后回原为例,找到档块上第一个Z相信号后,电机会继续往同一方向转动寻找脱离档块后的第一个Z相信号。
一般这就算真正原点,但因为有时会出现此点正好在原点档块动作的中间状态,易发生误动作,且再加上其它工艺需求,可再设定一偏移量;此时,这点才是真正的机械原点。
电机回原点方式电机回原点是指电机在运动过程中,通过特定的控制方式使其回到初始位置的过程。
电机回原点方式有多种,下面将介绍其中几种常用的方式。
一、限位开关方式限位开关是一种常用的用于控制电机回原点的装置。
在电机运动过程中,通过设置两个限位开关,当电机接触到某个限位开关时,就会停止运动并回到初始位置。
这种方式简单可靠,但需要合理设计和安装限位开关,以确保电机能够准确回到原点。
二、编码器方式编码器是一种用于测量电机位置的装置,通过编码器可以获得电机精确的位置信息。
在电机回原点过程中,可以利用编码器的信号来判断电机当前位置,从而控制电机运动到原点位置。
编码器方式具有高精度和高控制精度的特点,适用于对电机位置要求较高的场合。
三、位置传感器方式位置传感器是一种用于检测物体位置的装置,常见的有磁敏传感器、光电传感器等。
在电机回原点过程中,可以利用位置传感器探测电机位置,当电机达到预定的原点位置时,通过控制器停止电机运动,使其回到原点位置。
位置传感器方式具有较高的精度和稳定性,适用于对电机位置要求较高的场合。
四、倒回方式倒回方式是一种较为简单的电机回原点方式。
在电机运动过程中,当需要回原点时,可以通过控制电机反向运动,直至回到原点位置。
这种方式适用于一些对位置要求不高的场合,但需要注意控制电机的速度和运动距离,以确保能够准确回到原点位置。
电机回原点方式的选择应根据具体的应用场景和要求来确定。
不同的方式有着各自的特点和适用范围,需要根据实际情况进行选择和设计。
在选择方式时,需要考虑电机的精度要求、控制系统的性能、成本和可靠性等因素,并合理设计和调试回原点控制方式,以确保电机能够准确回到原点位置。
电机回原点是电机控制中的重要环节,不同的回原点方式有各自的特点和适用范围。
通过合理选择和设计回原点方式,可以实现电机的准确回到原点位置,为后续的运动和控制提供良好的基础。
EVOC,SOKO华北工控,硕控智能,蓝天,四维,首控工控,艾雷斯研华工控机,华北工控机,研祥工控机leetro 乐创伺服电机原点复归1、原点搜索就是原点没有建立的情况下执行。
2、原点返回就是原点已经建立的情况下,返回到原点位置。
原点信号又伺服驱动器给出,原点附近信号由传感器指定如果使用绝对脉冲,那么每次发送的脉冲量,都就是相对与这个原点来说的原点输入信号没有限定由谁给定, Z 相信号给定也就是可以的、不过建立原点有 3 种模式,可以选择只使用原点输入信号来建立原点第一次上电,先用建立原点、当后面的动作远离了这个原点,想返回去的时候, 选择原点返回实找零的方法有很多种,可根据所要求的精度及实际要求来选择。
可以伺服电机自身完成(有些品牌伺服电机有完整的回原点功能),也可通过上位机配合伺服完成,但回原点的原理基本上常见的有以下几种。
一、伺服电机寻找原点时,当碰到原点开关时,马上减速停止,以此点为原点。
这种回原点方法无论您就是选择机械式的接近开关,还就是光感应开关,回原的精度都不高,就如一网友所说,受温度与电源波动等等的影响,信号的反应时间会每次有差别,再加上从回原点的高速突然减速停止过程,可以百分百地说,就算排除机械原因,每次回的原点差别在丝级以上。
二、回原点时直接寻找编码器的Z相信号,当有Z相信号时,马上减速停止。
这种回原方法一般只应用在旋转轴,且回原速度不高,精度也不高。
三、此种回原方法就是最精准的,主要应用在数控机床上:电机先以第一段高速去找原点开关,有原点开关信号时,电机马上以第二段速度寻找电机的Z相信号, 第一个Z相信号一定就是在原点档块上(所以您可以注意到,其实高档的数控机床及中心机的原点档块都就是机械式而不会就是感应式的,且其长度一定大于电机一圈转换为直线距离的长度)。
找到第一个Z相信号后,此时有两种方试,一种就是档块前回原点,一种就是档块后回原点(档块前回原点较安全,欧系多用,档块后回原点工作行程会较长,日系多用)。
请教各位:在三菱PLC 控制伺服电机时,有时需要原点回归,但在原点回归指令ZRN 时却没有指定运行方向,但是当伺服处于原点的负方向时,它应该正转回归原点;当伺服处于原点的正方向时,它应该反转回归原点.是否在运行过程中伺服电机能判断在启动时的初始位置在原点的正反方向?楼主 发表于: 2008-07-09 22:01只看楼主 | 小 中 大fe c 原点回归引用此贴 | 举报该楼 | 收藏此贴 | 为他评分 | 添加到百度搜藏 | 收藏到QQ 书签 | 最新主题一天贼忙1 “在原点回归指令ZRN 时却没有指定运行方向,”回零方向可以在ZRN 指令执行前,将方向控制输出位Y 置位或复位1楼 发表于: 2008-07-10 14:23只看该作者 | 小 中 大fec Ic200alg327Large inventory- New,Remanufactured and Repair- All Modelsyangliu3楼 发表于: 2008-07-10 20:50只看该作者 | 小 中 大fe c级别: 牛刀小试精华主题: 0 发帖数量: 340 个 工控威望: 272 点 下载积分: 487 分 在线时间: 291(小时) 注册时间: 2006-11-12 最后登录: 2010-07-16 访问yangliu 的个人主页级别: 闯荡江湖一天贼忙原点回归的方式有多种,基本的有三种。
1 确定一个方向运动找到原点(这种适用于转盘类)2 确定一个方向,找两端其一的限位做原点。
(在PLC 里可以自己写这种程序,有的运动控制卡有这种回零方式选择)5楼 发表于: 2008-07-11 09:27只看该作者 | 小 中 大fe c精华主题: 0发帖数量: 580 个工控威望: 341 点下载积分: 5644 分在线时间: 25(小时)注册时间: 2007-11-15最后登录: 2010-07-06访问一天贼忙的个人主页6楼发表于: 2008-07-11 09:32只看该作者| 小中大f e c混灌水区的!引用此贴| 举报该楼| 收藏此贴| 为他评分| 添加到百度搜藏| 收藏到QQ书签 | 最新主题级别: 牛刀小试精华主题: 0 发帖数量: 340 个 工控威望: 272 点 下载积分: 487 分 在线时间: 291(小时) 注册时间: 2006-11-12 最后登录: 2010-07-16 访问yangliu 的个人主页yangliu一天贼忙当然,你也可以这样,不管你的工作台在那里。
三菱伺服电机怎样回原点
工业高度发达的今天,已经是信息时代,每天大量的信息涌入我们的脑海,总有太多了解不透的东西。
现在行业越来越细分,隔行如隔山,不管在哪个小领域,只要我们做的足够好,总是会有立足之地。
三菱伺服电机也是比较专业的设备,很多问题都要专业的人才能解决。
随着工业的发展,三菱伺服电机运用的领域也很多。
可以用于工作机械和一般工业机械等需要高精度位置控制和平稳速度控制的应用,也可用于速度控制和张力控制的领域。
在使用三菱伺服电机时也常会碰到一些问题,如三菱伺服电机hc-kfs23怎样回原点?工程师是想此电机断电后,我人为转动丝杆到任何位置,再上电。
伺服电机仍可准确找到原点位置,没有任何外部原电接近开关。
要实现这个功能,大家给出的建议是,要使用绝对位置系统,它会记得我们的绝对原点位置。
但要求在驱动器里装锂电池,来保存位置数据。
如果没有电池保证供电,伺服电机没有电源,也就没办法记住原点的位置,三菱伺服电机怎样回原点解决办法要看具体原因。
有时我们会遇到更麻烦的问题,三菱伺服电机怎样回原点,一位工程师用了一套三菱伺服系统(FX-2N的PLC,FX2N-1PG,
MR-E伺服,三菱HC-KF电机),使用时候,按照说明编写程序开机找原点,出现的问题是,到了原点感应器后,1PG立即
反向运行不停止,直到驱动器报警,到极限感应器也不停止。
这问题得好好分析一下,只有理清思路才能解决问题。
三菱伺服电机怎样回原点这个问题,感觉应该是在转动的过程中,没有找到零点的脉冲。
到极限也不停止,一个要看你极限开关的信号进入系统有没有,系统有没有检测到,还要看你编程对不对,编程时我们有时因为一个小小的细节没注意,当它反应出来时就会是个大问题,我们写程序时一定要仔细检查两遍。
不要等到后面出了问题再到处找原因,三菱伺服电机怎样回原点这个问题是不复杂的。
程序执行原点回位后,接受到了PGO信号后,1PG立即输出反向脉冲。
一直运转,到了极限感应器不停止,程序接收到极限感应器信号了,但是1PG的信号没有清0,一直有回原点的反向输出,驱动器报警了还在输出。
三菱伺服电机位置控制有两种方式,一种是相对位置的控制方式,只要将下一步位置和当前位置作比较就会知道。
另一种是绝对位置的控制方式,一直和零点位置作比较。
这两种方式都熟悉了后,
碰到三菱伺服电机怎样回原点这样的问题,我们得先了解清楚自己使用的伺服电机到底是什么功能的。