机器人常用传动介绍 PPT
- 格式:ppt
- 大小:15.98 MB
- 文档页数:35



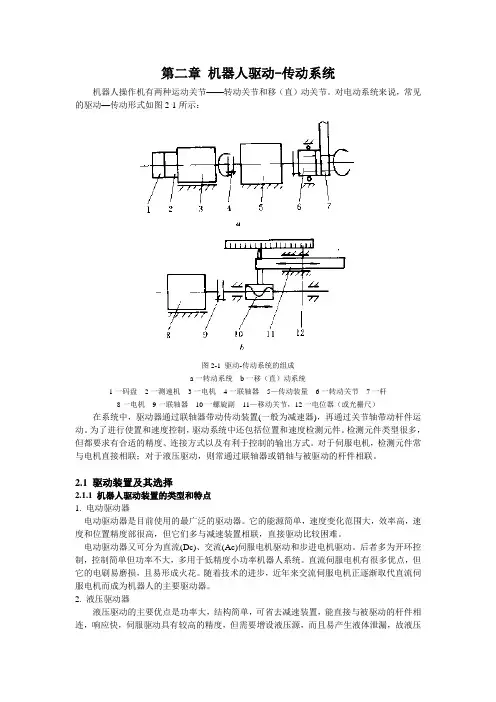
第二章机器人驱动-传动系统机器人操作机有两种运动关节——转动关节和移(直)动关节。
对电动系统来说,常见的驱动—传动形式如图2-1所示:图2-1 驱动-传动系统的组成a一转动系统b一移(直)动系统1一码盘2一测速机3一电机4一联轴器5—传动装量6一转动关节7一杆8一电机9一联轴器10一螺旋副11—移动关节,12一电位器(或光栅尺)在系统中,驱动器通过联轴器带动传动装置(一般为减速器),再通过关节轴带动杆件运动。
为了进行使置和速度控制,驱动系统中还包括位置和速度检测元件。
检测元件类型很多,但都要求有合适的精度、连接方式以及有利于控制的输出方式。
对于伺服电机,检测元件常与电机直接相联;对于液压驱动,则常通过联轴器或销轴与被驱动的杆件相联。
2.1 驱动装置及其选择2.1.1 机器人驱动装置的类型和特点1. 电动驱动器电动驱动器是目前使用的最广泛的驱动器。
它的能源简单,速度变化范围大,效率高,速度和位置精度部很高,但它们多与减速装置相联,直接驱动比较困难。
电动驱动器又可分为直流(Dc)、交流(Ac)伺服电机驱动和步进电机驱动。
后者多为开环控制,控制简单但功率不大,多用于低精度小功率机器人系统。
直流伺服电机有很多优点,但它的电刷易磨损,且易形成火花。
随着技术的进步,近年来交流伺服电机正逐渐取代直流伺服电机而成为机器人的主要驱动器。
2. 液压驱动器液压驱动的主要优点是功率大,结构简单,可省去减速装置,能直接与被驱动的杆件相连,响应快,伺服驱动具有较高的精度,但需要增设液压源,而且易产生液体泄漏,故液压驱动目前多用于特大功率的机器人系统。
图2-2为几种液压驱动器示例。
图2-2 几种液压驱动器3.气动驱动器气动驱动器的能源、结构都比较简单、但与液压驱动器相比,同体积条件下功率较小(因压力低),而且速度不易控制,所以多用于精度不高的点位控制系统。
图2-3为几种气动驱动器示例。
图2-3 几种气动驱动器2.1.2 伺服电机的特点及应用1. 直流伺服电机直流(DC)伺服电机转动惯性小,启停反应快,速度变化范围大,效率高,速度和位置精度都很高。