大角度单摆运动的计算机模拟
- 格式:pdf
- 大小:194.85 KB
- 文档页数:4
Visual Basic模拟单摆试验林晓熙理学院06级应用物理摘要:通过学习Vis ua l Bas ic编程软件,来模拟中学物理中的单摆试验,并从细节入手利用vb强大的计算能力,解决单摆中的一些特殊情况如,考虑到摆角,离地高度等对周期的影响以及在测量重力加速度时的一些修正。
方便重复计算。
制作一个方便且实用的程序关键字:Visual Basic单摆试验重力加速度Sensing the reluctance of the opposite sex to the magnetic fieldmeasurementsXiao xi linAbstra ct:Thr ou gh the stu dy Visu al Bas ic pr og ra mmi ng sof tw are,To sim ula te the pend ul um in the mid dl e scho ol phy si cs experiment.Ta ki ng int o acc oun t the swi ng ing angl e, hei gh t,and so the cyc le of meas ur in g acc el era ti on of gra vi ty, and in som e of the ame nd men ts.Deta il s fro m the sta rt usin g vb com pu tin g po we r to sol ve the pen dul um in som e spe cia l cir cu mst an ces for dou bl e cou nt ing.Cre at e a conv en ien t and pra ct ica l pro ce dur esKeyword:Visual Basic,simple pen dulum experiment;acceleration of grav ity(一)vb程序简介Visual Basic,简称VB,是Microsoft公司推出的一种Windows 应用程序开发工具。
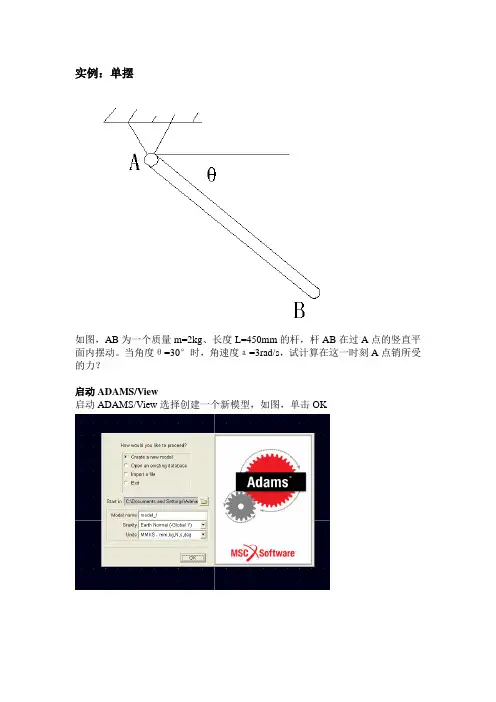
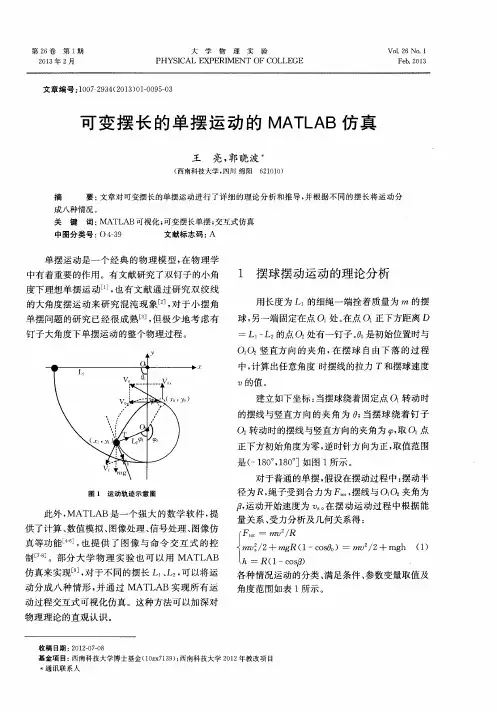
实例:单摆如图,AB为一个质量m=2kg、长度L=450mm的杆,杆AB在过A点的竖直平面内摆动。
当角度θ=30°时,角速度а=3rad/s,试计算在这一时刻A点销所受的力?启动ADAMS/View启动ADAMS/View选择创建一个新模型,如图,单击OK创建摆杆1.在主工具箱中,单击连杆工具图标2.在其选项中输入相关数据如图3.在工作视窗中,选择点(0,0,0)作为摆杆的起始点。
修改摆杆质量该问题需要设定摆杆的质量为2kg。
1.在摆杆上点击鼠标右键,选择如图:然后选择User Input,在mass文本框中输入2.0单击OK按钮,完成设置。
设置摆杆位置在主工具箱中单击位置设置图标在Angle文本框中输入30,在建模视图中选择摆杆,然后选择顺时针旋转图标,如图:创建转动副在主工具箱中,单击转动副工具图标,在其选项做如下修改,在工作视窗中用鼠标选择摆杆的起始点处的标记点PART2_MARKER_1,在摆杆与大地之间创建一个转动副设置初始运动现在在转动副上添加运动,使摆杆以3.0rad/s的初速度旋转。
在摆杆上右击鼠标,如图在Category选项中选择Velocity Initial Conditions,然后选择Part CM(零件质心)及其下面的Z axis,在Z axis中输入3.0r,代表转速为3.0rad/s,单击OK完成设置。
测量转动副受力右击摆杆右上角的转动副,选择Joint:JOINT_1,并在弹出菜单中选择Measure 命令,显示运动度测量对话框。
完成以下设置后,单击OK完成设置,会弹出一个空白的图表。
模型仿真单击主工具箱中的仿真工具图标,在End Time文本框中输入0.5,在Steps 文本框中输入50,然后单击开始图标,摆杆将绕着转动轴摆动,并在转动副受力曲线图中现实相应的数据,仿真结束后,单击返回图标,模型复位。
进行求解在转动副受力曲线图的空白处右击鼠标,显示弹出菜单,如图选择:进入ADAMS/PostProcessor界面,单击图标,显示曲线统计工具条,然后将光标移到曲线的起始位置,在曲线统计工具条中,显示x坐标值为0和相应的坐标值10.7762,即为A点转轴的受力。
实验二单摆机构的动力学模拟一、实验目的1.掌握多体动力学分析软件ADAMS中实体建模方法;2.掌握ADAMS中施加约束和驱动的方法;3.计算出单摆运动的位移、速度和加速度。
二、实验设备和工具1.ADAMS软件;2.CAD/CAM机房。
三、实验原理按照单摆机构的实际工况,在软件中建立相应的几何及约束模型,即按照单摆机构的实际尺寸,建立单摆几何实体模型;把摆臂和大地之间的实际连接简化成铰连接,从而在软件中建立其连接副模型;按照摆臂初始运动的参数,如初始转角和转速建立相应的驱动模型;然后利用计算机进行动力学模拟,从而可以求得摆臂在实际工况下的任何时间、任何位置所对应的位移、速度加速度,以及摆臂和大地铰接点处的约束反力等一系列参数。
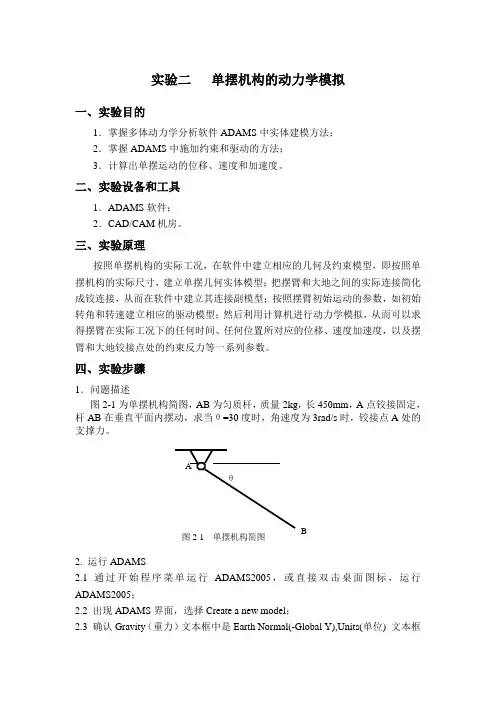
四、实验步骤1.问题描述图2-1为单摆机构简图,AB为匀质杆,质量2kg,长450mm,A点铰接固定,杆AB在垂直平面内摆动,求当θ=30度时,角速度为3rad/s时,铰接点A处的支撑力。
2. 运行ADAMS2.1 通过开始程序菜单运行ADAMS2005,或直接双击桌面图标,运行ADAMS2005;2.2 出现ADAMS界面,选择Create a new model;2.3 确认Gravity(重力)文本框中是Earth Normal(-Global Y),Units(单位) 文本框中是MM ,K ,S ,确认后单击OK 按钮;2.4 在Settings 下拉菜单中选择Working Grid ,系统打开参数设置对话框,在spacing 栏,X 和Y 都输入25mm 。
3. 建立几何模型3.1 用鼠标右键单击几何工具箱,弹出级联图标,用鼠标左键选中杆件图标;3.2 系统打开参数设置对话框,如图2-2所示,确认在工具箱下方文本框中显示New Part 。
选中Length 选项,输入45.0cm ,即摆臂长度。
选种width 选项,输入2.0cm ,选中Depth 选项,输入2.75cm ;3.3 按F4打开坐标框,鼠标单击(-225,0,0)作为摆臂的左侧起点,然后单击右侧水平方向任一点,ADAMS 自动生成摆臂,如图2-3所示;4. 设置模型参数4.1 设置摆臂质量鼠标右键单击摆臂Part_2,在右键打开的快捷菜单中选择Modify ,弹出修改对话框,在Define mass by 栏中选择User Input.,在Mass 栏输入2.0,单击OK 按钮。

基于Arduino 的大角度单摆研究周俊辰1.引言单摆实验是物理演示实验室中最简单明了的实验之一。
然而,单摆系统在考虑大角度效应与阻尼影响后,就成为了一个典型的非线性系统,周期变成角度与阻尼的复杂函数。
本文报告了基于Arduino 单片机的大角度弱阻尼单摆系统的实验研究。
通过搭建基于Arduino 的光电门系统,实现了时间的毫秒级测量,得到单摆周期随角度变化的关系,并测得了空气的线性阻尼系数。
2.理论背景大角度无阻尼单摆的动力学方程可写为如下形式:mlθ=−mgsinθ(1)该式虽然简单,但解析解十分复杂,通常将sinθ作级数展开,得到级数解:T =T 0(1+14sin 2θ02+964sin 4θ2+⋯);T 0=2π√lg(2)通常单摆在空气中的运动速度不大,其阻尼形式可取为线性阻尼,考虑阻尼后,(1)变为:θ+(gl)sinθ+αθ=0 (3)该式的解析解同样很复杂,但作者之前的HTML 模拟实验[1]表明,阻尼不大时周期的近似解为:T =T 0(w √w 02−4α2) (1+1sin 2θ0+9sin 4θ)(4)而线性阻尼影响下单摆的振幅将按指数形式衰减:θmt =θm0e −αt2(5)通过测量周期随摆角的变化,可以验证(4)式;通过测量摆角幅度随时间的衰减,可通过(5)式得到线性阻尼系数α。
3.实验设计本实验所有的物理量都通过时间测量得到。
时间值来自Arduino 内置时间函数Millis(),精度可达到1ms 。
实验设计的核心在于双光电门系统: 两副正对的激光头-光电探测器被固定在互相平行的基板两侧。
激光头发出的激光直直地照射到光电探测器的光敏电阻上。
当光线被挡住时,光电探测器将感应到这一型号并将其传输到Arduino 主板与电脑上。
装置工作时,摆球在两块基板所夹的空间中来回摆动,当小球运动到某一个光电探测器处时,对应激光被挡住,光电探测器从而可以记录到这个信号。
挡光的部分原本是摆球本体,经俞熹老师指导后改为缠绕在摆球上方的黑胶布。
C++实现单摆运动功能的代码一、引言在物理学领域中,单摆是一个非常经典的运动系统。
它可以用来研究物体在一个固定的支点上摆动的运动规律,是一个非常典型的振动系统。
在C++编程语言中,我们可以通过编写代码来模拟单摆的运动过程,进而加深对物理规律的理解。
本文将介绍如何使用C++编程实现单摆运动功能的代码,并通过具体示例进行讲解。
二、准备工作在开始编写代码之前,我们需要安装C++的开发环境。
推荐使用Visual Studio、Code::Blocks等集成开发环境,以便于编写、调试和执行C++代码。
三、实现代码以下是一个简单的C++代码示例,用来模拟单摆的运动过程。
我们将使用数值积分的方法来逼近单摆的摆动角度随时间的变化。
代码示例中包括了单摆的基本参数设置、运动方程的数值计算和结果的输出等部分。
```cpp#include <iostream>#include <cmath>using namespace std;// 定义单摆参数const double g = 9.8; // 重力加速度const double l = 1.0; // 摆长// 定义运动方程double theta_dot(double theta, double omega) { return omega;}double omega_dot(double theta, double omega) { return - (g / l) * sin(theta);}int main() {// 初始化参数double theta0 = 0.1; // 初角度double omega0 = 0.0; // 初角速度double t = 0.0; // 初始时间double dt = 0.01; // 时间步长int steps = 1000; // 迭代次数// 数值积分for (int i = 0; i < steps; i++) {double k1 = dt * theta_dot(theta0, omega0);double l1 = dt * omega_dot(theta0, omega0);double k2 = dt * theta_dot(theta0 + 0.5 * k1, omega0 + 0.5 * l1);double l2 = dt * omega_dot(theta0 + 0.5 * k1, omega0 + 0.5 * l1);double k3 = dt * theta_dot(theta0 + 0.5 * k2, omega0 + 0.5 * l2);double l3 = dt * omega_dot(theta0 + 0.5 * k2, omega0 + 0.5 * l2);double k4 = dt * theta_dot(theta0 + k3, omega0 + l3);double l4 = dt * omega_dot(theta0 + k3, omega0 + l3);theta0 = theta0 + (k1 + 2 * k2 + 2 * k3 + k4) / 6;omega0 = omega0 + (l1 + 2 * l2 + 2 * l3 + l4) / 6;t += dt;cout << "时间:" << t << ",角度:" << theta0 << endl; }return 0;}```四、代码解释1. 我们首先定义了单摆的一些基本参数,包括重力加速度g和摆长l。
单摆运动控制系统设计与仿真实验报告1.引言1.1 概述概述部分的内容:单摆运动控制系统是一个常见的控制系统应用领域,它在诸多科学实验、工程项目和技术研究中都有广泛的应用。
单摆运动控制系统通过控制摆臂的运动,实现对摆臂的稳定性和精确度的控制,从而达到预定位置、速度和加速度的要求。
随着科技的不断发展和进步,单摆运动控制系统的设计和仿真实验成为研究者们关注的焦点。
在过去的几十年中,众多学者和工程师们提出了各种各样的方法和理论,以提高单摆运动控制系统的性能和效果。
这些方法包括但不限于PID控制、自适应控制、模糊控制等等。
它们都在不同的场景中展现了自己的优势和特点,为单摆运动控制系统的设计和仿真实验提供了全新的思路和方法。
本文旨在介绍单摆运动控制系统的设计和仿真实验。
首先,我们将对单摆运动控制系统的相关背景和理论基础进行概述和分析。
接着,我们将详细介绍单摆运动控制系统的设计过程,包括系统结构、控制算法和参数选择等方面。
在设计完成后,我们将进行仿真实验,在不同的工作条件下对系统进行测试和评估,以验证设计的有效性和性能。
最后,我们将总结本文的研究成果,并对未来的研究方向进行展望。
通过本文的研究,我们希望能够为单摆运动控制系统的设计和仿真实验提供实用有效的方法和理论支持,为相关领域的研究者和工程师提供参考和借鉴。
同时,我们也期待通过本文的工作,能够推动单摆运动控制系统设计的进一步发展和应用。
文章结构部分的内容可以如下所示:1.2 文章结构本文主要分为三个部分,即引言、正文和结论。
引言部分主要概述了文章内容和研究背景,介绍了单摆运动控制系统设计与仿真实验的目的和重要性。
正文部分包括两个主要内容,即单摆运动控制系统设计和仿真实验。
在单摆运动控制系统设计中,我们将介绍系统的原理和设计方法,并详细描述系统的硬件和软件实现。
在仿真实验中,我们将使用相关仿真软件进行系统的仿真,验证设计的有效性和准确性。
结论部分对本文的主要内容进行总结,回顾了实验的结果和分析,总结了系统的性能和局限性。
沈阳航空航天大学课程设计任务书学院:机电工程学院专业:车辆工程班级:94060302学号:2009040603037 题目:模拟单摆运动一、课程设计时间2011年6月27日~7月1日(第18周),共计1周。
二、课程设计内容设计一个单摆机构,运动过程可随时停止和启动。
初始参数包括:初始角、触发时钟的间隔。
用户界面中的菜单至少应包括“初始参数设置”、“开始运动”、“退出”3项三、课程设计要求程序质量:✧贯彻事件驱动的程序设计思想。
✧用户界面友好,功能明确,操作方便;可以增加其他功能或修饰。
✧代码应适当缩进,并给出必要的注释,以增强程序的可读性。
课程设计说明书:✧课设结束后,上交课程设计说明书和源程序。
课程设计说明书的内容参见提供的模板。
四、指导教师和学生签字指导教师:________ 学生签名:________五、成绩六、教师评语目录一、需求分析 (4)二、设计分析 (4)三、关键技术 (6)四、总结 ....................................................... 错误!未定义书签。
五、完整的源程序 (11)六、参考文献 (14)一、需求分析模拟单摆运动,主要是使单摆能够在最低点左右摆动动,从而使得本软件能够模拟单摆的运动情况,用来在物理课的时候让同学能够更直接的感受到单摆的运行轨迹以及运行周期与初始角.绳长还有球质量的关系。
要求①设计界面把需要的文本控件.按钮控件以及图形添加到适合的位置②单摆可随时停止和启动③设置初始参数,初始参数包括:初始角度、触发时钟的时间间隔④用户界面中的菜单至少应包括“初始参数设置”、“开始运动”、“退出”3项。
二、设计分析(1)基本原理:设计窗体,通过时钟控件实现摆球的摆动(2)总体设计:图1 总体设计(3)详细设计:图1 详细设计(4)数据库设计:数据库设计是总体设计阶段非常重要的环节,数据库结构的变化会造成编码的改动,所以必须认真设计数据库结构后再进行编码,从而避免无谓的重复工作。
大角度单摆运动的计算机模拟
龙晓霞
【期刊名称】《重庆文理学院学报(自然科学版)》
【年(卷),期】2006(5)2
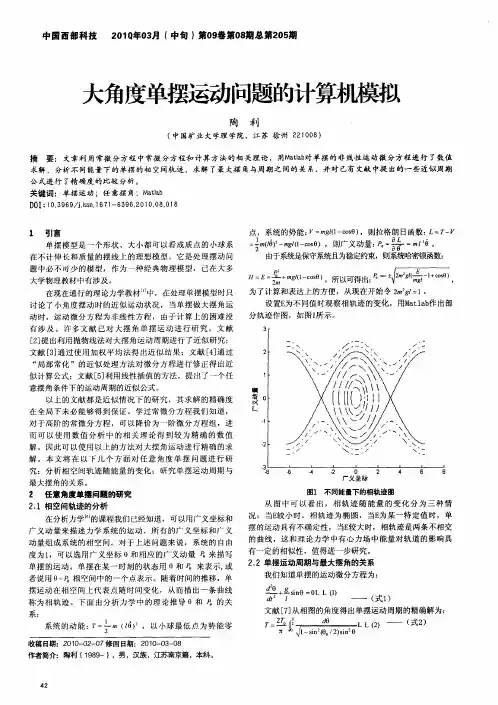
【摘要】大角度单摆问题属于非线性问题,很难用解析的方法求其运动.本文利用MATLAB软件对大角度单摆在无阻力无驱动、有阻力无驱动、有阻力有驱动3种情况下的运动进行了计算机模拟,并对运动情况进行了分析.
【总页数】4页(P28-31)
【作者】龙晓霞
【作者单位】重庆文理学院,物理与信息工程系,重庆,永川,402160
【正文语种】中文
【中图分类】O4-39
【相关文献】
1.大角度单摆运动问题的计算机模拟 [J], 陶利
2.大角度单摆运动的计算机模拟 [J], 龙晓霞;;
3.大角度单摆运动的周期研究 [J], 孙会娟;张宁
4.大角度单摆运动的数值计算 [J], 徐健良
5.悬点振动单摆运动的计算机模拟 [J], 汪金山
因版权原因,仅展示原文概要,查看原文内容请购买。
2006年6月重庆文理学院学报(自然科学版)J un 1,2006 第5卷 第2期J ournal of Chongqing Universi ty of Arts and Sciences (Nature Sciences Edi ti on)Vol 15 No 12大角度单摆运动的计算机模拟龙晓霞(重庆文理学院 物理与信息工程系,重庆 永川 402160)[摘 要]大角度单摆问题属于非线性问题,很难用解析的方法求其运动.本文利用MATLAB 软件对大角度单摆在无阻力无驱动、有阻力无驱动、有阻力有驱动3种情况下的运动进行了计算机模拟,并对运动情况进行了分析.[关键词]单摆;计算机模拟;MATLAB[中图分类号]O4-39 [文献标识码]A [文章编号]1671-7538(2006)02-0028-041 引言MATLAB 数学软件是欧美十分流行的通用性很强的数学软件,占据了数学软件市场的主导地位.它可以对非线性微分方程进行数值求解.当单摆的摆角小于5b 的时候,单摆的运动微分方程为线性方程,可以解析求解.但当单摆做大摆角运动时,其运动微分方程为非线性方程,很难用解析的方法讨论其运动.利用MATLAB 软件可以对单摆运动进行数值求解,模拟不同情况下大角度单摆的运动,其结果非常直观、形象.2 大角度单摆运动的模拟2.1 大角度单摆的运动微分方程单摆在做大摆角运动的情况下,考虑到空气阻力和驱动力的影响,其运动微分方程为[1]:d 2H d t 2+X 2sin H +2b d H d t =f cos pt 1其中,b 为阻尼因数,由阻力大小决定,f 和p 由驱动力决定,X 2=g l 由系统本身决定.2.2 无阻力、无驱动下大角度单摆的运动2.2.1微分方程图1根据大角度单摆的运动微分方程,在无阻力无驱动时,也就是b =0和f =0时,其运动微分方程为:d 2H d t 2+X 2sin H =012.2.2 相图及其分析由图1可以看出:(1)E <2mgl 时,摆锤在-P -P 的势阱中作周期运动,其相轨迹为一闭合曲线.(2)E >2mgl 时,摆锤在势场中作定向运动,且H 可以趋向?],其相轨迹为两条不相交的曲线,对应两个不同的X [收稿日期]2005-09-27[作者简介]龙晓霞(1965-),女,重庆荣昌人,副教授,主要从事力学教学及研究1[基金项目]重庆文理学院2005-2006年教育教学研究项目(05015)1运动方向.(3)E =2mgl 时,摆锤运动处于临界状态.当其H 对应势能曲线的极大值时,摆锤速度为零.下一时刻的运动具有不确定性,摆锤既可能沿原运动方向运动,也可能改变运动方向.2.2.3 摆角对周期的影响单摆在摆角小于5b 的情况下,单摆周期和摆角无关,但在大摆角运动的情况下,周期为[2]:T =2P l g 1+14sin 2H 02+1#32#42sin 4H 02+,1 由公式可以看出,周期随摆角的增大而增大.从周期与摆角的关系曲线(图2)以及初始摆角不同的位移曲线(图3)可以非常直观地看出这个结论.图2 图32.3 有阻力、无驱动下大角度单摆的运动2.3.1 微分方程根据大角度单摆的运动微分方程,在有阻力无驱动时,也就是b X 0和f =0时,其微分方程为:d 2H d t2+X 2sin H +2b d H d t =01 2.3.2 弱阻尼状态的位移时间图像和相图在弱阻尼状态下,由位移和时间图像(图4)可以看出,摆角随着时间的增加逐渐衰减,经历了多个往复过程停下来;由相图(图5)可以看出,相轨迹是对数螺线,最后终结于平衡位置.图4 图52.3.3 临界阻尼状态的位移时间图像和相图在临界阻尼状态下,由位移和时间图像(见下页图6)可以看出,单摆没有在平衡位置附近往复运动,而是很快回到了平衡位置;从相图(见下页图7)可以看出,由最开始的具有较大摆角、角速度为零的状态,直接回到了平衡位置.2.3.4 过阻尼状态的位移时间图像和相图在过阻尼状态下,由位移和时间图像(见下页图8)可以看出,单摆也没有在平衡位置附近往复运动,但和临界阻尼状态相比,经历了更长时间才回到平衡位置1从相图(图9)可以看出,单摆由最开始的具有较大摆角、角速度为零的状态,直接回到了平衡位置,和临界阻尼状态相比,其振动速度更小.图6 图7图8 图92.4 有阻力、有驱动下大角度单摆的运动2.4.1 微分方程根据大角度单摆的一般运动微分方程,在有阻力无驱动时,也就是b X 0和f X 0时,其微分方程为:d 2H d t 2+X 2sin H +2b d H d t =f cos pt 1 2.4.2 相同阻尼不同驱动力的位移时间曲线和相图图10 图11图12图13图14图15图10、图12、图14分别表示阻力相同、驱动力不同情况下的位移时间图像和相图.图10表示驱动力频率和系统的固有频率接近的情况,可以看出,系统的振幅最大,发生了共振现象;图12、图14表示驱动力频率和系统的固有频率相差较大的情况,系统的振幅较小1从相图反映的情况看,受迫振动在做等幅振动之前运动情况是相当复杂的,但它们经过一段时间以后均做等幅振动,相图为一闭合的椭圆.另外还可以看出,受迫振动的频率与驱动力频率相同.3结语本文运用MATLAB对无阻力无驱动、有阻力无驱动、有阻力有驱动情况下的大角度单摆的位移时间图像、周期与摆角的关系以及相图进行了分析,分析结果和理论上所得到的结果是一致的1这种方法可以非常直观、形象地反映单摆的运动情况,避免了求解复杂的方程.[参考文献][1]漆安慎,杜婵英.力学[M].北京:高等教育出版社,2000.[2]韦得泉,王秋芳.单摆的角振幅对其周期的影响[J].洛阳大学学报,2003,18(2):103.[3]胡静,彭芳麟,管靖,卢圣治.理论力学的计算机模拟[M].北京:清华大学出版社,2002.[4]陈怀琛.MATLAB及其在理工课程中的应用指南[M].西安:西安电子科技大学出版社,2000.C omputer Simulation for the Motion of a Single Pendulum in Large AngleLONG Xiao-xia(Dept.of Phys i cs and Information Engi neering,Chongqing University of Arts and Sci e nces,Yongchuan Chongqing402160,China) Abstract:A single pendulum in a large angle region involves nonlinearlity,which cannot be solved analytically. The simulations on the motion of a single pendulum in a large angle re gion are carried out by using MATLAB under three conditions that there are no resistance and no driving;resistance and no driving;resistance and driving,and the motions are discussed.Key words:single pendulum;computer simulation;MATLAB。
2006年6月
重庆文理学院学报(自然科学版)J un 1,2006 第5卷 第2期J ournal of Chongqing Universi ty of Arts and Sciences (Nature Sciences Edi ti on)Vol 15 No 12
大角度单摆运动的计算机模拟
龙晓霞
(重庆文理学院 物理与信息工程系,重庆 永川 402160)
[摘 要]大角度单摆问题属于非线性问题,很难用解析的方法求其运动.本文利用MATLAB 软件对大角度单摆在无阻力无驱动、有阻力无驱动、有阻力有驱动3种情况下的运动进行了计算机模拟,并对运动情况进行了分析.
[关键词]单摆;计算机模拟;MATLAB
[中图分类号]O4-39 [文献标识码]A [文章编号]1671-7538(2006)02-0028-04
1 引言
MATLAB 数学软件是欧美十分流行的通用性很强的数学软件,占据了数学软件市场的主导地位.它可以对非线性微分方程进行数值求解.
当单摆的摆角小于5b 的时候,单摆的运动微分方程为线性方程,可以解析求解.但当单摆做大摆角运动时,其运动微分方程为非线性方程,很难用解析的方法讨论其运动.利用MATLAB 软件可以对单摆运动进行数值求解,模拟不同情况下大角度单摆的运动,其结果非常直观、形象.
2 大角度单摆运动的模拟
2.1 大角度单摆的运动微分方程
单摆在做大摆角运动的情况下,考虑到空气阻力和驱动力的影响,其运动微分方程为
[1]:
d 2H d t 2+X 2sin H +2b d H d t =f cos pt 1其中,b 为阻尼因数,由阻力大小决定,f 和p 由驱动力决定,X 2=g l 由系统本身决定.2.2 无阻力、无驱动下大角度单摆的运动
2.2.1
微分方程
图1根据大角度单摆的运动微分方程,在无阻力无驱动时,
也就是b =0和f =0时,其运动微分方程为:
d 2
H d t 2+X 2sin H =012.2.2 相图及其分析
由图1可以看出:
(1)E <2mgl 时,摆锤在-P -P 的势阱中作周期运
动,其相轨迹为一闭合曲线.
(2)E >2mgl 时,摆锤在势场中作定向运动,且H 可以
趋向?],其相轨迹为两条不相交的曲线,对应两个不同的X [收稿日期]2005-09-27
[作者简介]龙晓霞(1965-),女,重庆荣昌人,副教授,主要从事力学教学及研究1
[基金项目]重庆文理学院2005-2006年教育教学研究项目(05015)1
运动方向.
(3)E =2mgl 时,摆锤运动处于临界状态.当其H 对应势能曲线的极大值时,摆锤速度为零.下一时刻的运动具有不确定性,摆锤既可能沿原运动方向运动,也可能改变运动方向.
2.2.3 摆角对周期的影响
单摆在摆角小于5b 的情况下,单摆周期和摆角无关,但在大摆角运动的情况下,周期为[2]:
T =2P l g 1+14sin 2H 02+1#32#42sin 4H 02
+,1 由公式可以看出,周期随摆角的增大而增大.从周期与摆角的关系曲线(图2)以及初始摆角不同的位移曲线(图3)可以非常直观地看出这个结论.
图2 图32.3 有阻力、无驱动下大角度单摆的运动
2.3.1 微分方程
根据大角度单摆的运动微分方程,在有阻力无驱动时,也就是b X 0和f =0时,其微分方程为:
d 2H d t
2+X 2sin H +2b d H d t =01 2.3.2 弱阻尼状态的位移时间图像和相图
在弱阻尼状态下,由位移和时间图像(图4)可以看出,摆角随着时间的增加逐渐衰减,经历了多个往复过程停下来;由相图(图5)可以看出,相轨迹是对数螺线,最后终结于平衡位置.
图4 图5
2.3.3 临界阻尼状态的位移时间图像和相图
在临界阻尼状态下,由位移和时间图像(见下页图6)可以看出,单摆没有在平衡位置附近往复运动,而是很快回到了平衡位置;从相图(见下页图7)可以看出,由最开始的具有较大摆角、角速度为零的状态,直接回到了平衡位置.
2.3.4 过阻尼状态的位移时间图像和相图
在过阻尼状态下,由位移和时间图像(见下页图8)可以看出,单摆也没有在平衡位置附近往复运
动,但和临界阻尼状态相比,经历了更长时间才回到平衡位置1从相图(图9)可以看出,单摆由最开始的具有较大摆角、角速度为零的状态,直接回到了平衡位置,和临界阻尼状态相比,其振动速度更小.
图6 图7
图8 图9
2.4 有阻力、有驱动下大角度单摆的运动
2.4.1 微分方程
根据大角度单摆的一般运动微分方程,在有阻力无驱动时,也就是b X 0和f X 0时,其微分方程为:
d 2
H d t 2+X 2sin H +2b d H d t =f cos pt 1 2.4.2 相同阻尼不同驱动力的位移时间曲线和相图
图10 图11
图12图13
图14图15
图10、图12、图14分别表示阻力相同、驱动力不同情况下的位移时间图像和相图.图10表示驱动力频率和系统的固有频率接近的情况,可以看出,系统的振幅最大,发生了共振现象;图12、图14表示驱动力频率和系统的固有频率相差较大的情况,系统的振幅较小1从相图反映的情况看,受迫振动在做等幅振动之前运动情况是相当复杂的,但它们经过一段时间以后均做等幅振动,相图为一闭合的椭圆.另外还可以看出,受迫振动的频率与驱动力频率相同.
3结语
本文运用MATLAB对无阻力无驱动、有阻力无驱动、有阻力有驱动情况下的大角度单摆的位移时间图像、周期与摆角的关系以及相图进行了分析,分析结果和理论上所得到的结果是一致的1这种方法可以非常直观、形象地反映单摆的运动情况,避免了求解复杂的方程.
[参考文献]
[1]漆安慎,杜婵英.力学[M].北京:高等教育出版社,2000.
[2]韦得泉,王秋芳.单摆的角振幅对其周期的影响[J].洛阳大学学报,2003,18(2):103.
[3]胡静,彭芳麟,管靖,卢圣治.理论力学的计算机模拟[M].北京:清华大学出版社,2002.
[4]陈怀琛.MATLAB及其在理工课程中的应用指南[M].西安:西安电子科技大学出版社,2000.
C omputer Simulation for the Motion of a Single Pendulum in Large Angle
LONG Xiao-xia
(Dept.of Phys i cs and Information Engi neering,Chongqing University of Arts and Sci e nces,Yongchuan Chongqing402160,China) Abstract:A single pendulum in a large angle region involves nonlinearlity,which cannot be solved analytically. The simulations on the motion of a single pendulum in a large angle re gion are carried out by using MATLAB under three conditions that there are no resistance and no driving;resistance and no driving;resistance and driving,and the motions are discussed.
Key words:single pendulum;computer simulation;MATLAB。