基于proe的机构运动仿真
- 格式:ppt
- 大小:4.60 MB
- 文档页数:34
摘要本课题所研究的直、摆组合凸轮机构是一种新型的机构类型,该机构通过直动从动件凸轮机构与摆动从动件凸轮机构组成联动凸轮机构,能够将主动件的转动转化为从动件上某点沿预期的曲线轨迹并以预期的运动规律运动。
在对直、摆组合凸轮机构理论分析的基础上,我们对直、摆组合凸轮机构进行了Pro/e 运动仿真,精确求解出了各凸轮的理论廓线、实际廓线及各构件结构尺寸等。
丰富了机械原理学科的设计理论及内容,适应了在机构设计方面许多学者致力于寻求凸轮机构的精确解和使凸轮曲线多样化及从动件轨迹多样化的要求。
最后,选择预期圆线轨迹为例,利用计算机辅助设计(Pro/ENGINEER)对该机构进行零、部件及总体造型分析设计,并利用Pro/ENGINEER对该直、摆组合凸轮机构进行了运动仿真,以验证理论的正确性和可行性。
因此,对直、摆组合凸轮机构进行深入地研究有着较大的理论和现实意义,有广阔的应用前景。
关键词:Pro/e应用组合机构凸轮设计运动仿真AbstractThe Z.B Combinatory Cam Mechanism is a kind of new-type mechanism, it can come into a kind of combinatory-movement mechanism which joints translation driven member cam and swing follower cam .It can translate the revolution of the driving body into a point of the driven body which has the ability to move around the anticipation curvilinear path and move based on the anticipation movement rule.Based on the theory in analyzing Z.B Combinatory Cam Mechanism,we simulate the mechanism in applying VB,solving the profile of theory,reality,cutter of cams,and the subject and dimension of all components exactly.Enriching the design-theory and content of the subject about mechanical principal .Adapting the request of many scholars in component design for searching the exact solution about cam-entity and making the cam-curve various and follower-profile various.Lastly, taking the four-leaf rose curve for example, applying the Pro/ENGINEER to design the curve, entity and motive emulate for verifying the truth and feasibility of the theory.Nowadays, researching the Z.B Combinatory Cam Mechanism, having the significance in theory and reality .The prospect is extensive.Key words:Pro/ENGINEER Application Combination Mechanism Cam Design Motive Emulate目录第一章前言---------------------------------------------------------------------------------------------------11.1 直、摆组合凸轮机构的研究意义---------------------------------------------1 1.2 凸轮机构以及组合机构的研究和发展状况------------------------------------4 1.3 Pro/ENGINEER WildFire软件的简介------------------------------------------5 1.4 本课题的主要研究内容----------------------------------------------------6 第二章直、摆组合凸轮机构基本设计及计算机辅助设计---------------------------72.1 直、摆组合凸轮机构基本设计----------------------------------------------7 2.2 直、摆组合凸轮机构凸轮各种廓线设计--------------------------------------142.2.1直动凸轮廓线求解--------------------------------------------------152.2.1.1 直动凸轮理论廓线-------------------------------------------152.2.1.2 直动凸轮实际廓线-------------------------------------------152.2.2 摆动凸轮廓线求解-------------------------------------------------162.2.2.1 摆动凸轮理论廓线-------------------------------------------162.2.2.2 摆动凸轮实际廓线-------------------------------------------16 2.3 计算机辅助设计---------------------------------------------------------16 2.4 设计举例---------------------------------------------------------------17 2.5 本章小结---------------------------------------------------------------20 第三章直、摆组合凸轮机构Pro/ENGINEER的设计-------------------------------213.1 创建凸轮模型-----------------------------------------------------------21 3.2 运动仿真的设计---------------------------------------------------------23 3.3 Pro/ENGINEER实体运动仿真-----------------------------------------------253.4 机械仿真结果分析及保存-------------------------------------------------29第四章小结----------------------------------------------------------------32 参考文献-------------------------------------------------------------------33第一章前言1.1直、摆组合凸轮机构的研究意义本课题研究的是直、摆组合凸轮机构如图1-1所示。

proe机构运动仿真教程典型效果图1.1机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。
PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics (机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线和运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
1.2总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单图1-5 工具栏图标图1-5所示的“机构”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
曲柄滑块机构运动学仿真
1、目的
本文档旨在基于PROE4.0版本软件,设计一曲柄滑块机构,并仿真测量其关键点速度、加速度、位移等关键信息。
2、模型设计
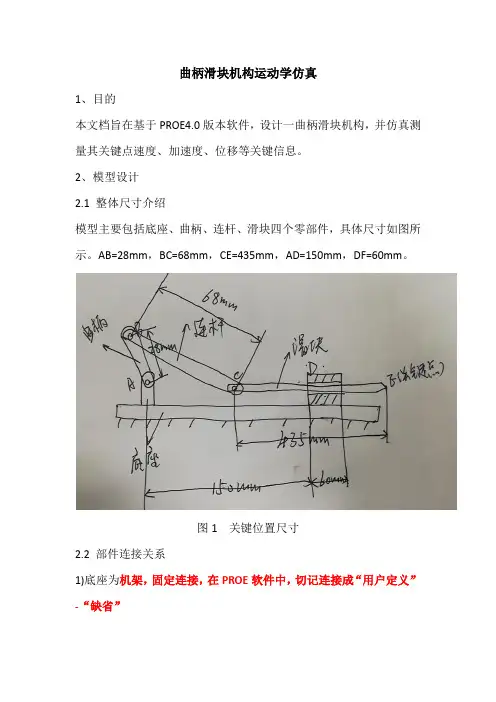
2.1 整体尺寸介绍
模型主要包括底座、曲柄、连杆、滑块四个零部件,具体尺寸如图所示。
AB=28mm,BC=68mm,CE=435mm,AD=150mm,DF=60mm。
图1 关键位置尺寸
2.2 部件连接关系
1)底座为机架,固定连接,在PROE软件中,切记连接成“用户定义”-“缺省”
2)曲柄与底座为“铰接”。
与连杆也为“铰接”。
3)滑块与底座为“滑动杆”连接。
4)连杆一端与曲柄为“铰接”;再新建一连接关系,与滑块“铰接”。
3、运动学仿真设置
1)在装配完成后,点击“应用程序”-“机构”菜单,进入机构仿真界面。
2)添加伺服电机驱动,设置成如图界面,并在“速度”一栏,点击“速度、位置、加速度”
3)仿真。
点击仿真按钮,设置成如图所示,选择“运动学”仿真,并点击“运行”,机构开始动作。
4)回放,保存。
仿真完成后,点击回放按钮,可以回放仿真,并进行保存。
5)测量。
仿真结束后,可以测量关键信息,如关键点速度、加速度、位置等,如图所示。
在左上角可以显示相应曲线。
6)仿真结束后,保存。
下一次运行时,可以读取相关数据。
湖北文理学院毕业设计(论文)正文2011年 5 月 25日基于PRO/E的曲柄滑块机构的结构设计及运动仿真分析摘要:曲柄滑块机构是用曲柄和滑块来实现转动和移动相互转换的平面连杆机构,也称曲柄连杆机构。
曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的主机构中。
活塞式发动机以滑块为主动件,把往复移动转换为不整周或整周的回转运动;压缩机、冲床以曲柄为主动件,把整周转动转换为往复移动。
偏置曲柄滑块机构的滑块具有急回特性,锯床就是利用这一特性来达到锯条的慢进和空程急回的目的。
关键词:曲柄滑块;机构;设计;回转;往复;急回The structural design of the slider-crank mechanism and motion simulation analysis based on PRO/EAbstract: The slider-crank mechanism is a crank and slider torotate and move the conversion between the planar linkage, also known as crank linkage. The slider-crank mechanism is widely used in the reciprocating piston engines, compressors, presses and other institutions. Piston engine slider initiative pieces, the reciprocating motion is converted to not weeks or rotary movement of the whole week; compressors, presses crank driving part, the whole week rotation converted to move back and forth. Slider offset slider-crank mechanism with quick-return characteristics of the sawing machine is to use this feature to achieve the purpose of the quick return of the saw blade slowly into the empty process.Key words: crank slider; institutions; design; rotation; back and forth; quick return目录1绪论 11.1课题提出的目的和意义 11.2国内外的研究现状及发展趋势 21.3运动仿真技术及国内外运动仿真技术现状和发展概况 21.4主要研究内容、途径及技术路线 31.5本章小结 52 曲柄滑块机构简介 62.1曲柄滑块机构定义 62.2曲柄滑块机构的特性及应用 62.3曲柄滑块机构的分类 62.4偏心轮机构简介 72.5 本章小结 83曲柄滑块机构的动力学与运动学特性 9 3.1曲柄滑块的动力学特性 93.2曲柄滑块的运动学特性 103.3本章小结 114曲柄滑块机构零件设计 114.1 曲柄滑块机构总体分析 114.2曲柄滑块机构零件的三维造型 114.3本章小结 175 曲柄滑块机构的装配 185.1曲柄滑块机构的模型的创建步骤 18 5.2本章小结 196曲柄滑块机构运动仿真 206.1运动机构仿真 206.2机构仿真 206.3本章小结 22参考文献 23致谢 241绪论1.1课题提出的目的和意义当今任何一个国家,若其要在综合国力上取得优势地位,就必须在科学技术上取得优势。
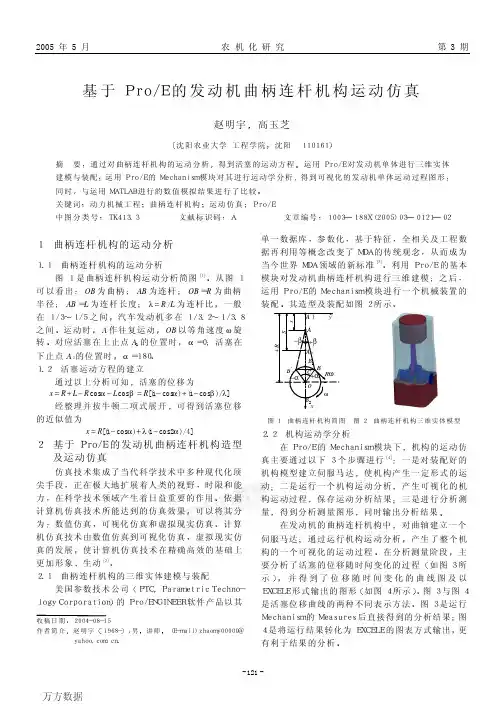
基于PRO/E的连杆机构设计及远动仿真分析摘要连杆机构是机械中常见的一种机构,是往复式内燃机的主要工作机构。
曲柄连杆机构是发动机实现工作循环,完成能量转换的主要远动零件。
虚拟装配与远动仿真是根据产品的形状特征.精度特性,利用计算计图形学和仿真技术,在计算机上模仿产品的实际装配过程.仿真模拟机器的远动过程。
通过对曲柄连杆机构进行有关运动学和理论分析与计算机仿真分析,利用PRO/E软件的装配功能,将曲柄连杆机构的各组成零件装配成活塞组件.连杆组件和曲柄组件,从而完成内燃机曲柄连杆机构的虚拟装配与运动仿真。
在内燃机的开发设计阶段应用这种方法可以大大缩短产品的开发周期,减少样机实验次数,快速的对市场做出反应,降低产品的成本,提高企业的竞争力。
关键词:曲柄连杆机构:虚拟装配:运动仿真;装配功能Based on Pro/E internal combustion engine connecting rod assembly and motion simulation of the virtualAbstractThe crank is a common machinery, reciprocating internal engine is the main working body. Crank the engine duty to achieve of the main moving parts of energy. Virtual and motion simulation based on tee shape of product precision features the use of computer graphics and simulation technology, the product on the computer to imitate the actual assembly process the movement of the machine Crank through the relevant kinematics and dynamics of the theoretical analysis and computer simulation analysis, the use of Pro/E, assembly features, the crank assembly of the constituent parts into a piston, connecting rod assemblies and crankshaft components, to complete the internet combustion engine connecting rod assembly and motion simulation of the virtual. The development of internal combustion engine design using this method can greatly shorten the product development cycle and reduce prototype test times, respond quickly to market, lower product costs and improve the competitiveness of enterprises.Keywords: crank Vrtual assembly; Motion simulation;assembly features目录1绪论 (5)1.1本课题研究的目的和意义 (6)1.2国内外的研究现状及发展趋势 (7)2设计的方案 (9)2.1研究的基本内容 (9)2.1.1连杆机构的结构设计 (9)1手压抽水机的结构特点 (9)2手压抽水机的设计 (9)3连杆机构的装配 (13)3.1手压抽水机的装配 (13)3.2伺服电动机定义 (22)3.3运动分析定义 (23)4本文总结 (24)5参考文献 (25)6致谢 (26)1绪论1.1本课题研究的目的和意义基于虚拟现实的产品虚拟拆装技术在新产品开发、产品的维护以及操作培训方面具有独特的作用。
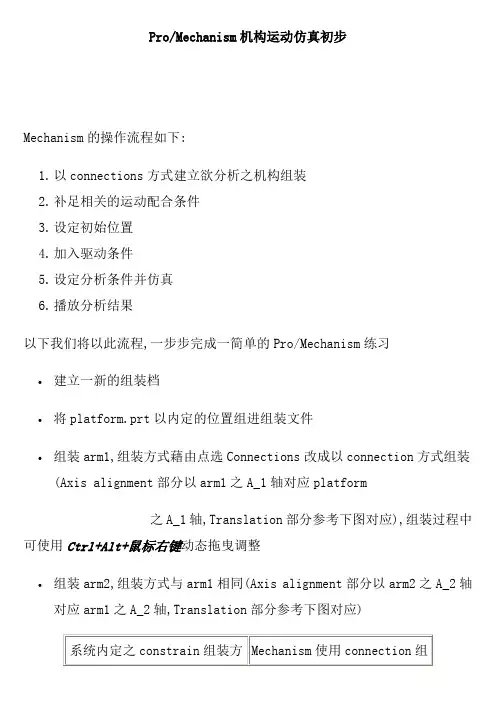
Pro/Mechanism机构运动仿真初步Mechanism的操作流程如下:1.以connections方式建立欲分析之机构组装2.补足相关的运动配合条件3.设定初始位置4.加入驱动条件5.设定分析条件并仿真6.播放分析结果以下我们将以此流程,一步步完成一简单的Pro/Mechanism练习∙建立一新的组装档∙将platform.prt以内定的位置组进组装文件∙组装arm1,组装方式藉由点选Connections改成以connection方式组装(Axis alignment部分以arm1之A_1轴对应platform之A_1轴,Translation部分参考下图对应),组装过程中可使用Ctrl+Alt+鼠标右键动态拖曳调整∙组装arm2,组装方式与arm1相同(Axis alignment部分以arm2之A_2轴对应arm1之A_2轴,Translation部分参考下图对应)∙组装完成后点选Mechanism进入Mechanism环境∙点选Drag,以鼠标左键点取arm1或arm2上任意位置,保持按住并拖曳调整成如下图的位置由于我们尚未告诉系统arm2与platform之间的connection配合关系此时我们必须将此条件加入∙选取Model选项中的Cams设定arm2与platform之间的connection为Cams配合,对应参考如下图,至于Front Reference选PNT0,Back Reference则选PNT1,此时我们已完成本机构所需的connection设定∙使用Drag的功能再次拖曳,注意现在机构的运动方式与未加入Cams设定前有何不同接下来开始设定此机构的初始位置一般而言,若我们不设定机构的初始位置,Mechanism会以屏幕上目前的位置作为初始位置通常那只是我们在组装时的大略位置,因此建议还是加以设定∙选取Model Jt Axis Settings,选取arm1与platform之间的Pin connection,勾选Specify Reference并选取如下右图中的橘色面作为参考∙切换至Regen Value画面,勾选Specify Regeneration Value,输入45,作为将来regenerate之角度此时可试着设定不同的角度值并使用下方的Preview键,观察不同角度的变化要让机构产生动作我们必须加入动力条件,此时选择加上伺服马达动力条件∙选取Servo Motors,选取arm1与platform之间的Pin connection,切换到Profile画面将Specification改成Velocity,设定A值为10,如下图.此时可更改A为任意值,并点选下方的键,观察速度随着时间的数值变化当本练习所需要的条件设定完后,屏幕上看到的画面应如下图所示若没有问题,开始设定分析的条件选取Analyses,使用系统的默认值,点选Run键此时在屏幕上看到机构正以所加入的伺服马达动力开始运动仿真当运动到接近底部时,机构会停住并弹出一警告窗口,告诉我们系统无法继续运算,此为正常情形,因为我们输入的角度过大,当摇臂转到底部时会被底座卡住,而我们正是故意如此设定,因为我们想让系统为我们检查出机构在运动过程中产生的干涉∙选择abort离开并关闭窗口∙选取Results/Playback,勾选Global Interference作总体干涉检查,点选键系统将开始计算,当播放器出现并加以播放后,干涉的部分会以红色显示,如下图。
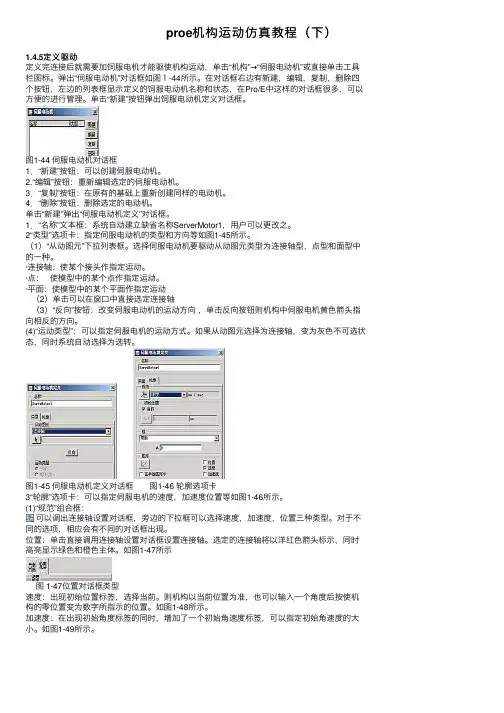
proe机构运动仿真教程(下)1.4.5定义驱动定义完连接后就需要加饲服电机才能驱使机构运动,单击“机构”→“伺服电动机”或直接单击⼯具栏图标。
弹出“伺服电动机”对话框如图1-44所⽰。
在对话框右边有新建,编辑,复制,删除四个按钮,左边的列表框显⽰定义的饲服电动机名称和状态,在Pro/E中这样的对话框很多,可以⽅便的进⾏管理。
单击“新建”按钮弹出饲服电动机定义对话框。
图1-44 伺服电动机对话框1.“新建”按钮:可以创建伺服电动机。
2.“编辑”按钮:重新编辑选定的伺服电动机。
3.“复制”按钮:在原有的基础上重新创建同样的电动机。
4.“删除”按钮:删除选定的电动机。
单击“新建”弹出“伺服电动机定义”对话框。
1.“名称”⽂本框:系统⾃动建⽴缺省名称ServerMotor1,⽤户可以更改之。
2“类型”选项卡:指定伺服电动机的类型和⽅向等如图1-45所⽰。
(1)“从动图元”下拉列表框。
选择伺服电动机要驱动从动图元类型为连接轴型,点型和⾯型中的⼀种。
·连接轴:使某个接头作指定运动。
·点:使模型中的某个点作指定运动。
·平⾯:使模型中的某个平⾯作指定运动(2)单击可以在窗⼝中直接选定连接轴(3)“反向”按钮:改变伺服电动机的运动⽅向,单击反向按钮则机构中伺服电机黄⾊箭头指向相反的⽅向。
(4)“运动类型”:可以指定伺服电机的运动⽅式。
如果从动图元选择为连接轴,变为灰⾊不可选状态,同时系统⾃动选择为选转。
图1-45 伺服电动机定义对话框图1-46 轮廓选项卡3“轮廓”选项卡:可以指定伺服电机的速度,加速度位置等如图1-46所⽰。
(1)“规范”组合框:可以调出连接轴设置对话框,旁边的下拉框可以选择速度,加速度,位置三种类型。
对于不同的选项,相应会有不同的对话框出现。
位置:单击直接调⽤连接轴设置对话框设置连接轴。
选定的连接轴将以洋红⾊箭头标⽰,同时⾼亮显⽰绿⾊和橙⾊主体。
如图1-47所⽰图 1-47位置对话框类型速度:出现初始位置标签,选择当前。
Pro/E软件与机构运动的仿真摘要:本文讨论了机械原理(机械基础)教学中机构运动仿真视频的作用及其优势,着重对用Pro/E软件制作机构运动的多媒体仿真视频进行了探讨。
关键词:Pro/E;机构运动;多媒体仿真一.前言随着多媒体技术的确发展,其应用已遍及社会生活的各个角落,正在对人们的工作方式、生活方式带来巨大的变革。
同样,多媒体技术对教学也产生了积极的效应,能为学生提供最理想的教学环境。
由于多媒体具有图、文、声并茂及活动影象的特点,具有许多宝贵的特性与功能。
主要表现为;直观性,能突破视觉的限制,多角度地观察对象,并能够突出要点;图文声像并茂,多角度调动学生的情绪、注意力和兴趣。
动态性,动态反映机构运动的全过程,有效地突破了传统教学难点;通过多媒体对真实情景的模拟,培养学生的探索、创造能力;传统的机构运动教学多半是用挂图进行讲述,既没有立体感,也没有动态感,没有接触过机械的学生很难想象出机构运动的情形,如果在多媒体教学环境中,通过动画、图形、声音的演示,加上教师深入浅出的讲解,学生会在不知不觉中学到知识。
这样学生就能够在原有认知结构和生活经验的基础上,认同我们的概念和思维方式,并强化到自己新的认知结构中,形成自己新的概念和思维方式。
Pro/E软件平台能直接仿真机构各零件的造型与装配,可进行机构运动的仿真,甚至可以仿真一台机器的运行。
对机构的运动进行多角度、多方位的观查,还可进行透视和剖视情况观查。
并能将运动的画面生成视频文件,供离开Pro/E 软件平台时进行演示。
二.Pro/E简介Pro/E全称是“Pro ENGINEER”由美国PTC(参数)公司开发的一款三维软件。
Pro/E软件具有操作容易、使用方便、修改方便的特点。
因此在机械三维实体造型设计中得到了广泛的应用。
具有很强的实体造型、虚拟装配和仿真运行能力。
功能界面清楚明确,让使用者视觉和心理都有一种轻松感。
目前已经成为机械设计、家电设计、模具设计等行业所普遍采用的三维软件。
proe机械运动仿真Pro/Engineer(ProE)是一种先进的计算机辅助设计(CAD)软件,可以进行机械运动仿真,提供了一种方便的方式来模拟机械系统的动态行为,以预测其行为和性能。
本文将介绍ProE机械运动仿真的基本原理及步骤,以及运动仿真在机械设计中的应用。
一、ProE机械运动仿真的基本原理和步骤机械运动仿真(Motion Simulation)是计算机辅助工程(CAE)的一种重要分支,主要用于仿真机械系统运动学和动力学行为以及实验研究的虚拟环境中。
ProE机械运动仿真可以帮助工程师模拟和优化机械系统的动态行为,以便更好地了解和改进产品性能,并节省设计时间和成本。
1. ProE机械运动仿真的基本原理ProE机械运动仿真基于三维计算机模型,具体步骤如下:(1)建立三维模型首先,需要使用ProE的塑性建模工具来创建机械部件的三维模型。
(2)定义约束在模型中,需要对各个部件进行约束,以模拟真实机械部件的连接和约束关系。
例如,可以使用ProE的运动关系约束(Motion Constraint)对两个部件进行连接,或使用轴向约束(Axial Constraint)将部件约束到固定轴上。
(3)定义动力学行为在模型中,需要定义机械系统的动力学行为,即受到的各种力和扭矩的作用。
(4)运行仿真分析在构建模型和定义运动学和动力学特性后,可以运行仿真分析来模拟系统的动态行为。
ProE提供了一套强大的仿真分析工具,可以帮助用户准确地预测机械系统的行为和性能。
2. ProE机械运动仿真的步骤ProE的机械运动仿真主要包括以下步骤:(1)建立三维模型使用ProE的建模工具创建机械系统的三维模型,并定义其结构和组成部分。
这包括机械部件的几何形状和运动特性。
(2)定义运动关系和约束ProE提供了多种约束类型,可用于定义机械部件之间的约束关系。
例如,可以使用运动关系约束将两个部件连接在一起,并定义它们之间的运动范围。
(3)定义动力学行为在模型中添加力、重力、摩擦等动力学特性,并定义它们的大小和方向。
ProE机构仿真ProE机构仿真教程——ProE基于骨架模型实现运动仿真教程(wildfire野火3.0) 作者:无维网李有财很多网友问道这个问题,小可献丑,把一点体会与大家分享。
在TOP_DOWN设计中,利用骨架模型,实现运动的仿真,对于提高设计效率和协同作业,有着极高的适用意义。
下面我们用一个简单的例子,说明如何利用骨架线,来引导整体模型的仿真运动。
首先新建一个组立文档,然后新建一个骨架模型,如图:在此骨架模型中,画出需要运动的骨架线,并标注各条线的长度,和一个驱动角度。
如图:然后针对驱动角度,写出一个关系式,来驱动骨架线的运动模拟。
关系式如下:angle=angle+5if angle>=360angle=0endifd4:0=angle意思是:我们给角度一个驱动值,这里我设定值为5.当角度大于了360度之后,(也就是转了一圈),让这个角度归零,重新开始。
如图:写完这个关系式,用再生模拟一下,如果不报错,说明是成功的。
接下来的事情就简单了。
我们用发布几何的方式,分别把4条线发布到4个零件中去,如图:然后对每个模型加入相关几何特征,完成零件的制作。
如图:在装配档里,我们可以一直按住再生,让整个模型动起来:在更改零件的时候,我们只需要对骨架零件的尺寸进行修改,整个模型就会自动更新,实现TOP_DOWN的设计思路。
当然,您也可以将各个零件用稍钉连接的方式重新装配一遍,以便在机构中做更好的运动模拟。
这里模型比较简单,就不在对此进行说明。
下面是电子书下载。
大家给点小费吧;P ;P论坛附件(下载需登录)老大,看看,这是为什么呢,照着写得,怎么会是无效符号呢你需要先添加一个参数:名称就是你取的angle(也可是其他名字,便于你识别和理解的),参数类型:实数,参数值:0-360之间任取(角度嘛:lol )。
proe机构运动仿真教程Pro/E是一款专业的三维参数化设计软件,具备强大的建模、绘图和分析功能,同时也支持运动仿真。
Pro/E机构运动仿真可以帮助设计师在设计机构时预测机构在运动过程中的动态行为和工作状态,从而提高设计的准确性和效率。
本教程将介绍Pro/E机构运动仿真的基础知识和操作步骤。
一、机构运动仿真概述机构运动仿真是指通过计算机模拟机构在不同工作状态下的动态行为和运动学、动力学特性,以评估机构的工作效率、可靠性和稳定性等。
机构运动仿真可以帮助设计师预测机构在实际工作中的行为,包括运动范围、速度、加速度和力等指标。
与传统的试制方法相比,机构运动仿真可以极大地降低试制成本和时间,同时也提高了设计的准确性和效率。
二、机构运动仿真的基础知识1. 机构机构是由两个或多个刚体通过连杆、齿轮、曲柄等连接构成的机械系统。
机构的功能是将输入运动和输出运动分离,从而实现不同类型的运动转换。
机构的类型根据连接的刚体个数可分为二级机构和三级机构;根据传递运动的方式可分为平面机构和空间机构;根据传递运动的数量可分为单自由度机构和多自由度机构。
2. 运动学和动力学运动学是研究机构运动的几何学原理,包括机构末端轨迹、速度、加速度和角度等指标;而动力学是研究机构运动的动力学原理,包括机构的力学特性、动力特性和能量特性等。
机构运动仿真需要同时考虑机构的运动学和动力学特性,并进行分析和仿真。
3. 运动学链运动学链是指连接机构各个部件的连杆、齿轮和副件等构成的运动链路。
运动学链的结构会影响机构的运动学性能,因此在机构运动仿真前需要建立运动学链模型,并确定各个部件之间的关系和运动学指标等。
三、机构运动仿真的操作步骤机构运动仿真需要按照以下基本步骤进行:1. 建立模型并确定机构类型在Pro/E中打开新的机构模型,并根据实际需求从零开始建立机构模型。
确定机构类型,包括二级机构或三级机构、平面机构或空间机构、单自由度机构或多自由度机构等。