ANALOGFILTER库函数说明
- 格式:doc
- 大小:551.50 KB
- 文档页数:9

资深老工程师分享:利用PSpice仿真数字滤波器的快速简单方法PSpice 已经成为模拟电路仿真使用的行业标准工具。
模拟电路具有真实的物理实现,可以用它们的原理示意图进行仿真,其频率响应是电路时间常数的结果。
与之相反的是,数字滤波器对一系列样本进行数学运算。
数字滤波器的时间常数隐藏在采样间隔T中。
因此数字滤波器一般是通过它们的传递函数进行数学仿真,而且为了做到这一点,能够方便地仿真由采样率fs引起的采样延时T=1/fs非常重要,因为这个延时定义和衡量了整个滤波器的响应性能。
通常拉普拉斯变换用于模拟电路的行为建模,因为它将时域变换成为复频率s域。
数字滤波器的频率响应作为一个特殊例子,可以从拉普拉斯变换的时移理论(延时理论)推导出来。
该理论表示,如果时间函数f(t)在时域中被延时了时间T,那么在频域中的结果要乘以e-sT,见公式(1)。
esT项经常被称为延时因子,如果用符号z代替,如公式(2)所示,那么拉普拉斯变换将升级为所谓的z变换。
这样,回到时域,z-n对应延时的nth样本,z0是当前样本,zn代表未来的nth样本。
本设计实例介绍了一种在PSpice中进行数字滤波器频率响应仿真的快速简单直观方法。
PSpice模拟行为建模符号库abm.slb包含LAPLACE部分(拉普拉斯电压控制的电压源),其中任何s域传递函数都可以用分子(NUM)和分母(DENOM)的形式写出来。
为了仿真z域传递函数,首先要在电路参数列表中定义采样间隔T。
然后用公式(2)代替zn,在LAPLACE部分写出z域传递函数。
在PSpice中,这种替代可以通过定义一个函数(公式(3))完成,而这个函数就是本设计实例的核心。
举例来说,如果用分子或分母形式将z(-10)写下来,PSpice将用e-10sT替代z(-10) (s是LAPLACE部分使用的拉普拉斯变量)。
公式(3)可以放在包含文件中,或更方便地放在新原理图模板FUNCTIONS中。


Cadence ORCAD CAPTURE元件库介绍Ieee文件夹ieee_百度百科美国电气和电子工程师协会(IEEE)是一个国际性的电子技术与信息科学工程师的协会,是世界上最大的专业技术组织之一(成员人数),拥有来自175个国...IEEE Digital_IEEE_7400BUS_Driver_Transceiver_IEEE_7400Counter_IEEE_7400Digital_Gate_IEEE_7400.olbDigital_Latch_IEEE_7400.olb 锁存器Digital_MUX_IEEE_7400.olb MUX•多路复用器(multiplexer);Digital_Shift_Register_IEEE_7400.olbDigital_Static_RAM_IEEE_7400.olb 静态随机存储器(Static Random Access Memory)Library文件夹AMPLIFIER.OLB共182个零件,存放模拟放大器IC,如CA3280,TL027C,EL4093等。
Amplifier_Analog_IC.olbARITHMETIC.OLB共182个零件,存放逻辑运算IC,如TC4032B,74LS85等。
Digital_Logic_Arithmetic_IC.olbATOD.OLB共618个零件,存放A/D转换IC,如ADC0804,TC7109等。
Data_AD_Converter.olbBUS DRIVERTRANSCEIVER.OLB共632个零件,存放汇流排驱动IC,如74LS244,74LS373等数字IC。
Digital_Bus_Drive_TransceiverCAPSYM.OLB共35个零件,存放电源,地,输入输出口,标题栏等。
CONNECTOR.OLB共816个零件,存放连接器,如4 HEADER,CON AT62,RCA JACK等。
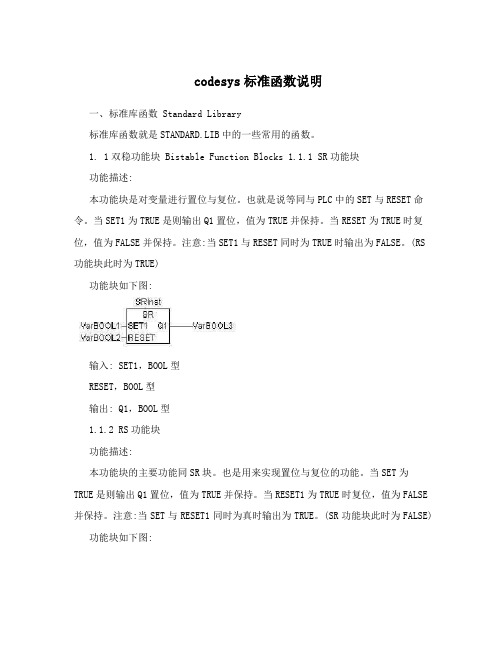
codesys标准函数说明一、标准库函数 Standard Library标准库函数就是STANDARD.LIB中的一些常用的函数。
1. 1双稳功能块 Bistable Function Blocks 1.1.1 SR功能块功能描述:本功能块是对变量进行置位与复位。
也就是说等同与PLC中的SET与RESET命令。
当SET1为TRUE是则输出Q1置位,值为TRUE并保持。
当RESET为TRUE时复位,值为FALSE并保持。
注意:当SET1与RESET同时为TRUE时输出为FALSE。
(RS功能块此时为TRUE)功能块如下图:输入: SET1,BOOL型RESET,BOOL型输出: Q1,BOOL型1.1.2 RS功能块功能描述:本功能块的主要功能同SR块。
也是用来实现置位与复位的功能。
当SET为TRUE是则输出Q1置位,值为TRUE并保持。
当RESET1为TRUE时复位,值为FALSE并保持。
注意:当SET与RESET1同时为真时输出为TRUE。
(SR功能块此时为FALSE) 功能块如下图:输入: SET,BOOL型RESET1,BOOL型输出: Q1,BOOL型1.1.3 SEMA功能块功能描述:本功能块的主要功能同SR块。
也是用来实现置位与复位的功能。
当CLAIM为TRUE时输出为TRUE。
当RELEASE为TRUE时输出为FALSE。
当两者同是为TRUE是输出为FALSE。
本功能块与SR以及RS功能块的最大的不同就是本功能块是同过一个内部变量X来传递值的。
语句如下:BUSY := X;IF CLAIM THEN X:=TRUE;ELSE IF RELEASE THEN BUSY := FALSE; X:= FALSE;END_IF功能块如下图:输入: CLAIM,BOOL型RELEASE,BOOL型输出: BUSY,BOOL型1. 2计数器功能块Counter1.2.1 CTD功能块功能描述:本功能块是自减记数器。

Simulink Filter的用法目录1.简介2.Simulink Filter概述–Simulink Filter的定义3.Simulink Filter的基本概念–滤波单元–滤波器类型1.低通滤波器2.高通滤波器3.带通滤波器4.带阻滤波器–滤波器设计4.Simulink Filter的应用–音频处理–图像处理5.总结简介Simulink是一款Matlab软件的附加模块,用于进行动态系统建模和仿真。
Simulink Filter是Simulink提供的一种过滤器模块,用于信号处理中的滤波操作。
本文将详细介绍Simulink Filter的用法和相关概念。
Simulink Filter概述Simulink Filter的定义Simulink Filter是Simulink中的一个模块,用于对输入信号进行滤波处理。
它可以根据用户指定的滤波器类型和参数,对输入信号进行不同类型的滤波操作,如低通、高通、带通或带阻滤波。
Simulink Filter的基本概念滤波单元在Simulink Filter中,滤波器被划分为多个滤波单元。
每个滤波单元都有均衡器和延迟单元组成。
均衡器用于设计滤波器的增益特性,延迟单元用于控制信号的延迟时间。
滤波器类型Simulink Filter支持以下几种基本滤波器类型:低通滤波器低通滤波器允许低频信号通过,但削弱高频信号。
常用于去除噪音或平滑信号。
高通滤波器高通滤波器允许高频信号通过,但削弱低频信号。
常用于滤除低频噪音或强调高频信号。
带通滤波器带通滤波器允许指定频率范围内的信号通过,但削弱其他频率的信号。
常用于特定频率段的信号分析和处理。
带阻滤波器带阻滤波器不允许指定频率范围内的信号通过,但保留其他频率的信号。
常用于滤除特定频率段的信号。
滤波器设计使用Simulink Filter进行滤波器设计的基本步骤如下: 1. 在Simulink模型中添加Filter模块。
2. 配置滤波器类型和参数。
目录前言 (2)要求 (2)基本要求 (2)1.3 基本操作 (2)工程概况 (2)正文 (3)2.1 滤波器功能及分类 (3)模拟滤波器设计理论 (3)3.1. MATLAB基础知识介绍 (4)3.2 MA TLAB信号处理工具箱函数介绍 (5)3.2.1freqs 求模拟滤波器()aH s的频率响应函数 (5)3.2.2buttord 求最小阶数N的函数 (5)3.2.3buttap 模拟低通滤波器原型设计函数 (5)模拟频率变换函数 (5)3.2.5zp2tf 零极点转换至传递函数的函数 (5)单元设计思路 (5)模拟低通滤波器原型设计 (5)频率转换,得到模拟高通滤波器 (6)程序设计 (7)程序编写 (7)小结 (11)致谢 (12)参考文献 (12)心得体会 (12)前言本课程是通信工程专业的主要专业基础课。
通过本课程的理论教学、实验、课程设计使学生掌握信号与系统的基本概念,线性时不变系统的基本特性,信号通过线性系统的基本分析以及综合、设计的方法。
培养学生的抽象思维能力,提高分析问题、解决问题的能力,软件开发能力为后续课程的学习以及从事实际工作打下良好的基础。
通过设计要求学生掌握对线性系统进行模拟、仿真和滤波器的设计方法。
能解释和说明系统的极、零点对系统的性能的影响(如频率、冲击响应和稳定性等)能解释和说明系统传输函数特性对滤波的影响。
了解在MATLAB环境下系统模拟和仿真的方法和技术。
1.2基本要求通过课程设计,提高学生综合运用所学知识来解决实际问题、查阅文献资料、及进行科学实验或技术设计的能力,为毕业设计(论文)打基础。
每个学生在课程设计选题中选做一个专题,学会用Matlab 语言编写信号与系统及数字信号处理的仿真程序;认真分析每个题目的具体要求;上机前初步编好程序,上机时认真调试程序;课程设计结束时提交符合格式要求的课程设计报告。
1.3 基本操作有老师监督,独立完成,上交作业要附带程序和图形,然后进行论文答辩。
1. 简介MATLAB中的filter函数是一种用于信号处理和滤波的重要工具,可以对数字信号进行滤波处理,包括低通滤波、高通滤波、带通滤波等多种滤波方式。
在实际工程和科学研究中,filter函数被广泛应用于音频处理、图像处理、通信系统等领域。
本文将重点介绍MATLAB中filter函数的用法与作用。
2. 基本语法MATLAB中filter函数的基本语法如下:```MatlabY = filter(B, A, X)```其中,B和A分别是所需滤波器的分子系数和分母系数,X是待滤波的输入信号序列,Y是滤波后的输出信号序列。
3. 滤波器设计与参数在使用filter函数进行滤波前,需要设计出所需的滤波器。
通常可以使用MATLAB中的fir1、fir2、butter、cheby1等函数进行滤波器的设计,得到分子系数B和分母系数A。
滤波器的参数包括截止频率、通带幅度、阻带幅度等,这些参数将直接影响滤波效果。
4. 低通滤波低通滤波是一种常见的信号处理方式,可以剔除高频噪声、平滑信号曲线。
在MATLAB中,可以通过设计滤波器并利用filter函数实现低通滤波,有效提取出信号的低频成分。
5. 高通滤波高通滤波的作用与低通滤波相反,可以剔除低频信号,突出高频细节。
利用MATLAB中的filter函数,可以很方便地实现高通滤波处理,适用于频率分析、边缘检测等应用场景。
6. 带通滤波除了低通滤波和高通滤波外,MATLAB中的filter函数还支持带通滤波,即只保留指定频率范围内的信号成分,其他频率成分则被滤除。
带通滤波经常用于通信系统中的频率选择性传输。
7. 实际应用在实际工程和科学研究中,filter函数被广泛应用于音频处理、图像处理、信号处理等领域。
在音频处理中,可以利用低通滤波器剔除底噪;在图像处理中,可以利用高通滤波器增强图像细节;在通信系统中,可以利用带通滤波器进行频率选择性传输。
8. 总结在MATLAB中,filter函数是一种非常强大的信号处理工具,可以满足各种滤波需求。
matlab中的filter函数Matlab是一种常用的数学计算软件,其中的filter函数是一种常用的信号处理函数。
本文将介绍filter函数的基本使用方法和原理,以及在实际应用中的一些注意事项和示例。
我们来了解一下filter函数的基本用法。
在Matlab中,filter函数的语法格式为:y = filter(b, a, x),其中b和a分别是系统函数的分子和分母多项式系数,x是输入信号。
这个函数的作用是将输入信号x通过系统函数的滤波器得到输出信号y。
在使用filter函数时,我们需要注意一些细节。
首先,分子和分母多项式系数b和a必须是向量,且长度是相同的。
其次,输入信号x也必须是向量。
此外,滤波器的阶数等于分子多项式的最高次数和分母多项式的最高次数中的较大值。
filter函数的原理是基于差分方程的离散时间系统的模拟。
差分方程描述了系统对输入信号的响应过程,通过对输入信号进行递推运算,得到输出信号。
在filter函数中,系统函数的分子和分母多项式系数b和a决定了差分方程的形式和特性,从而决定了滤波器的特性。
在实际应用中,filter函数有着广泛的用途。
例如,可以用它来滤除信号中的噪声、衰减信号中的高频成分、提取信号中的特定频率成分等。
下面我们以一个实际的示例来说明filter函数的应用。
假设我们有一个包含噪声的信号,我们想要滤除其中的噪声。
我们可以先生成一个包含噪声的信号,并用plot函数将其可视化:```matlabt = 0:0.01:10;x = sin(2*pi*t) + 0.5*randn(size(t));plot(t, x);xlabel('Time');ylabel('Amplitude');title('Noisy Signal');```接下来,我们可以使用filter函数来设计一个低通滤波器,滤除信号中的高频噪声。
我们可以选择一个合适的截止频率,然后使用设计滤波器函数(如butter、cheby1等)来得到滤波器的分子和分母多项式系数。
signal.filtfilt是Python中SciPy库中的一个滤波函数,用于设计和应用线性数字滤波器。
它具有零相位滤波的特性,可以有效地去除信号中的噪音和干扰,是信号处理领域常用的工具之一。
本文将介绍signal.filtfilt函数的基本原理、使用方法和实际应用,帮助读者更好地理解和掌握这一重要的信号处理工具。
一、signal.filtfilt的基本原理signal.filtfilt函数是一种双向滤波器,它通过两次对输入信号进行滤波,一次正向滤波,一次反向滤波,来实现零相位滤波的效果。
其基本原理可以用如下步骤来描述:1. 设计滤波器:首先根据需要设计一个线性数字滤波器,可以是FIR滤波器或IIR滤波器,选择合适的滤波器参数和类型。
2. 正向滤波:将输入信号通过设计好的滤波器进行正向滤波,得到中间结果。
3. 反向滤波:将中间结果再次通过相同的滤波器进行反向滤波,得到最终结果。
这样,经过两次滤波之后,信号的相位延迟得到了补偿,从而实现了零相位滤波的效果。
signal.filtfilt函数封装了这一过程,使得用户可以方便地应用零相位滤波器来处理信号。
二、signal.filtfilt的使用方法signal.filtfilt函数是SciPy库中的一个子模块,使用时需要先导入signal模块。
其基本语法如下:```pythonfrom scipy import signalresult = signal.filtfilt(b, a, x)```其中,b和a是设计好的滤波器系数,x是输入的信号。
signal.filtfilt 函数会返回滤波后的结果,可以直接赋值给变量result进行进一步处理或分析。
在实际应用中,通常需要先设计滤波器并求得滤波器系数b和a,然后再调用signal.filtfilt函数进行滤波处理。
设计滤波器的方法有很多种,可以根据具体需求选择合适的滤波器类型和参数。
对于已有的信号处理工具箱,也可以使用其中提供的滤波器函数来设计滤波器,然后将得到的系数传递给signal.filtfilt函数进行滤波处理。
二、模拟量标定库AnalogFilter Library模拟量标定库就是指AnalogFilter.lib中的一些库函数。
2.1 CUT功能块功能描述:把输入值进行预处理,调整斜率,消除两端非线性影响。
调整效果见图:功能块如下图:输入:(1)Input,UINT型,要处理的信号。
(2)PAR_InputILowLimit,UINT型,用来控制输出的下限。
当Input<=256*PAR_InputILowLimit时输出为0。
(3)PAR_InputHighLimit,UINT型,用来控制输出的上限。
当Input>=256*PAR_InputHighLimit时输出就为256*PAR_InputHighLimit。
输出:(1)Output,UINT型,处理完的信号。
(2)LowLimit,BOOL型,Input<=256*PAR_InputILowLimit时LowLimit为TRUE。
(3)HighLimit,BOOL型,Input>=256*PAR_InputHighLimit时HighLimit为TRUE。
2.2 HP功能块功能描述:设置一个死区,把死区以内的值都设为0。
功能如图:功能块如下图:输入:(1)Input,UINT型,输入信号。
. (2)PAR_CutLimit,UINT型,死区控制参数。
当Input<=256*PAR_CutLimit时输出为0。
输出:(1)Output,UINT型,处理完的信号。
2.3 JoyFilter功能块功能描述:JoyFilter块是一个双向的模拟量标定块,也就是说它对输入的模拟量进行预处理,把输出范围调整为-32767~32767。
功能块如下图:输入:(1)AnalogInput,UINT型,模拟量的输入信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
(3)DI_JoystickDirSwitchNEG,BOOL型,负向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向负向移动,那么只有负向微动开关TRUE,OUTPUT才会有输出。
(4)PAR_NegFull,UINT型,负向输入的调节参数。
取值范围:0~255,主要用于当负向输入最大时,调节参数使得OUTPUT也为负向最大。
(5)PAR_POSFull,UINT型,正向输入的调节参数。
取值范围:0~255,主要用于当正向输入最大时,调节参数使得OUTPUT也正负向最大。
(6)PAR_Zero,UINT型,零输入的调节参数。
取值范围:0~255,主要用于当手柄在零位时,即零输入时,调节参数使得OUTPUT也为零。
(7)PAR_DeadBand,UINT型死区设置参数。
取值范围:0~100。
当输入进入参数设置范围,输出为零(8)PAR_NegProgression,SINT型。
取值范围:-100~100,设置负向输出缓冲曲线度,手柄负向输出值相对于输入值的一个响应曲线,曲线如图:x(9)PAR_PosProgression,SINT型。
取值范围:-100~100,设置正向输出缓冲曲线度,手柄正向输出值相对于输入值的一个响应曲线。
(10)PAR_MinErrorDifference,UINT型,取值范围:0~100,设置出错范围,当输入超出范围时,激活ErrorHigh或ErrorLow开关,并使输出为零。
(11)PAR_Fault O nDelay,UINT型,取值范围:0~255,过载延时。
(12)PAR_DirSwitchDiagnosticNotUse,BOOL型,此参数为TRUE时,微动开关无效,为FALSE时,微动开关有效输出:(1)OutputEable,BOOL型,输出使能,为TRUE是块才会有输出。
(2)Output,INT型,调整后的信号量,输出数值范围-32767~32767(3)ErrorHigh,BOOL型,当输入超出PAR_Full +5000范围时,ErrorHigh为TRUE,输出置零。
(4)ErrorLow,BOOL型,输入超出PAR_Zero–PAR_MinErrorDifference范围,ErrorHigh为TRUE,并把输出置零。
(5)JoystickDirSwitchPOSMissing,BOOL型,正向微动开关出错时,值为TRUE。
(6)JoystickDirSwitchNEGMissing,BOOL型负向微动开关出错时,值为TRUE。
(7)JoystickDirSwitchPOSAndNEGOn,BOOL型,正、负向微动开关同时为TRUE时,值为TRUE。
2.4 JoystickAllnputOutOfRange功能块功能描述:本功能块是用来实现对一个模拟量输入的观察。
功能块如下图:输入:(1) Allnput,UINT型,需要观察的模拟量信号。
(2) PAR_PosFull,UINT型,正向最大调整参数。
(3) PAR_NegFull,UINT型,负向最大调整参数。
(4) PAR_MinErrorDifference,UINT型,设置出错范围,当输入超出范围时,激活ErrorInputTooHighOut或ErrorInputTooLowOut开关,并使输出为零。
输出:(1) ErrorInputTooHighOut,BOOL型,AIInput + PAR_MinErrorDifference >PAR_PosFull, 则输出为TRUE。
(2) ErrorInputTooLowOut,BOOL型,AIInput +PAR_MinErrorDifference <PAR_NegFull,则输出为TRUE。
2.5 JoystikDirSwitchDiagnostic功能块功能描述:本功能块是用来观察手柄模拟量输入时微动开关的状态。
功能块如下图:输入:(1)AnalogInput,UINT型,需要观察的模拟量信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
(3)DI_JoystickDirSwitchNEG,BOOL型,负向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向负向移动,那么只有负向微动开关TRUE,OUTPUT才会有输出。
(4) PAR_PosFull,UINT型,正向最大调整参数。
(5) PAR_NegFull,UINT型,负向最大调整参数。
(6) PAR_Zero,UINT型,零输入的调节参数。
主要用于当手柄在零位时,即零输入时,调节参数使得OUTPUT也为零。
(7) PAR_Fault O nDelay,UINT型,过载延时。
输出:(1)JoystickDirSwitchPOSMissing,BOOL型,正向微动开关出错时,值为TRUE。
(2)JoystickDirSwitchNEGMissing,BOOL型负向微动开关出错时,值为TRUE。
(3)JoystickDirSwitchPOSAndNEGOn,BOOL型,正、负向微动开关同时为TRUE 时,值为TRUE。
2.6 MeanValue功能块功能描述:对给的数组进行求平均数操作。
功能块如图:输入:(1) Input,UINT型,数据输入。
(2) PAR_Length,UINT型,取数长度,如值为5,则每5个值求一次平均值,并输出到output。
(3) Reset,BOOL型,复位信号,值为TRUE时不进行平均值运算。
输出:(1) Output,UINT型2.7 PedalFilter功能块功能描述:PedalFilter功能块是一个单向的标定模块,主要用于把输入模拟量进行预处理,把输出量范围调整到0~65535。
功能块如下图:输入:(1)AbalogInput,UINT型,来自于传感器的输入量OutPutEnable,BOOL型,使能开关。
参数值为TRUE时,模块按当前值输出;为FALSE时,保持上一次输出值。
(2)PAR_Full,UINT型,取值范围:0~255,此参数用于调整最大输出值,当输入最大时,使输出接近65535,小于65535。
(3)PAR_Zero,INT型,取值范围:0~255,此参数用于调整零位,使输出为零。
(4)PAR_DeadBand,UINT型,取值范围:0~100,设置死区,当输入进入参数设置范围,输出为零。
(5)PAR_Progression,SINT型,取值范围:-100~100设置输出缓冲曲线度。
(6)PAR_MinErrorDifference,UINT型,取值范围:0~100,设置出错范围,当输入超出范围时,激活ErrorHigh或ErrorLow开关,并使输出为零。
(7)OutputEnable,BOOL型,使能开关。
输出:(1)Output,UINT型,取值范围:0~65535,输出信号。
(2)ErrorHigh,BOOL型,高位出错开关。
输入超出PAR_Full +PAR_MinErrorDifference范围,ErrorHigh为TRUE,并把输出置零。
(3)ErrorLow,BOOL型,低位出错开关,输入超出PAR_Zero – PAR_MinErrorDifference 范围,ErrorHigh为TRUE,并把输出置零。
2.8 RC功能模块功能描述:RC功能块是滤波功能块,它是对传感器信号的输入信号进行滤波。
滤波公式为:z0.6x()y()z.功能块如下图:输入:(1) Input,UINT型,输入信号。
输出:(1)Output,UINT型,输出信号。
2.9 Scale功能块功能描述:Scale功能块的主要作用是把一个0~65535量变换成为两个0~65535的量,如下图:功能块如下图:输入:(1)Input,UINT型(2)PAR_Zero,INT型,设置零位,当输入为PAR_Zero * 256时,输出为0。
(3)PAR_PosFull,UINT型,当input值>=PAR_PosFull * 256时, 输出为65535 ,PosValue 为TRUE。
(4)PAR_NegFull,UINT型,当input值<= PAR_NegFull * 256, 输出为-65535 ,PosValue 为FALSE。