武大遥感2012复试(回忆版)
- 格式:doc
- 大小:27.00 KB
- 文档页数:1

2010年题目描述:现有一幅128×128大小的图像,其对应的像元亮度值(从0到255)存储在文本文件input.txt中(其中第一行分别表示图像的行、列数,后面每一行128个数值表示该行图像的亮度值),请编程计算:1)图像亮度最大值、最小值、平均值、方差,将结果输出保存到hist.txt文件中;2)图像的中值滤波是通过对邻域内采样数据进行排序并取得中值来决定中心像素灰度的一种处理手段,可有效消除图像中少量离散的噪声。
中值滤波可以举例描述如下:图像中的某一行亮度值如下: A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 A11 A12对该行按照1×5窗口进行中值滤波可以理解为以当前像元为中心取前后相邻的5个像元灰度值进行排序(前后没有像元视为其亮度值为0),取中值作为当前像元亮度值,则A3像元中值滤波的结果为A1 A2 A3 A4 A5排序后的中值。
请对本题图像按照1×5窗口进行中值滤波,将结果输出保存到midle.txt文件中。
注意:1)请将程序代码、执行程序和输出结果保存到同一个文件夹下; 2)文件夹名为考号+姓名。
2011年编程实现基于最邻近规则的试探法聚类算法。
一、算法说明:设有n个样本,X1,...,Xn,不妨令任一样本作为聚类中心Z1,并选取任一非负的阈值T,为方便起见,我们选X1=Z1,然后计算X2到Z1的距离D21,若D21>T,则建立一新的聚类中心Z2,且X2=Z2,若D21<T,则认为X2在以Z1为中心的域中,即X1,X2同属一类。
然后分别计算X3到Z1,Z2的距离,得到D31,D32,若D31>T,D32>T,则建立一新的聚类中心Z3,且X3=Z3,否则将X3划分到最近的聚类中心的域中,并重新计算该类的聚类中心(该类的样本均值)。
用类似的方法对所有样本计算距离,比较阈值,决定归属,直至所有样本分类结束。
二、编程实现1)从sample.txt中读取样本数据; 2)阈值输入4(分别为(3,3),(4,4),(6,6)); 3)距离计算; 4)聚类中心计算;5)实现基于最邻近规则的试探法聚类程序; 6)将聚类结果输出至result.txt文件中。
III购买资料后,强烈建议登记QQ,以便享受GIS遥感地理学考研中心后续的资料解答、复试辅导等会员服务。
另新的年份,包括真题、出题特点等都会有新变化,我们也会及时更新资料,大家多加关注。
III购买资料后,强烈建议登记QQ ,以便享受GIS 遥感地理学考研中心后续的资料解答、复试辅导等会员服务。
另新的年份,包括真题、出题特点等都会有新变化,我们也会及时更新资料,大家多加关注。
IVGIS遥感地理学全国考研中心,由GIS、遥感、地理学几个学长创办,专业为大家提供地学考研全套资料。
用我们的劳动节省你复习的时间,用我们的知识提高你专业课的复习,用我们的人脉提供给你最详实的资料,用我们的经历告诉你怎样走过考研全过程。
欢迎大家一起交流。
淘宝:;拍拍:/771843105。
下为我们整理的武汉大学遥感考研手册的部分目录。
目录序言 ................................................................................................................ 错误!未定义书签。
资料使用说明................................................................................................. 错误!未定义书签。
1、重要版块介绍................................................................................... 错误!未定义书签。
2、资料使用方法................................................................................... 错误!未定义书签。
3、资料接受说明................................................................................... 错误!未定义书签。
2004:#include<iostream>#include<fstream>#include<vector>n";return 1;}vector<int>vec_int;int numeric(0);for(i=0;i<10000;i++){infile>>numeric;(numeric);}ofstream outfile("");if(!outfile){cout<<" open failed.\n";return 1;}outfile<<"卷积一次后的矩阵:\n";vecInt = ConvolutionFun1(vec_int, M, N);for(i=0; i<M; i++){for(j=0; j<N; j++){outfile<<vecInt[i][j]<<" ";}outfile<<'\n';}outfile<<'\n';vecInt = ConvolutionFun2(vec_int, R, S);outfile<<"第二次卷积后的矩阵:\n";for(i=0; i<R; i++){for(j=0; j<S; j++){outfile<<vecInt[i][j]<<" ";}outfile<<'\n';}outfile<<'\n';();();return 0;}n";return 1;}n";return 1;}n";return 1;}n";return 1;}ofstream outfile("");if(!outfile){cerr<<" open failed.\n";return 1;}infile>>nBand>>nPiexl;vector<vector<double> >vec_double(nBand, vector<double>(nPiexl));for(i=0; i<nBand;i++){for(j =0; j<nPiexl; j++){infile>>vec_double[i][j];}}vector<double>vec_average_double(nBand);for(i=0; i<nBand;i++){vec_average_double[i] = AverageVector(vec_double[i]);}outfile<<"均值向量为:\n";copy(), (), ostream_iterator<double>(outfile, " "));outfile<<'\n';VecDouble vec_covariation_double(nBand, vector<double>(nPiexl));vec_covariation_double = CovariationMatrix(vec_double, vec_average_double, nBand, nPiexl);outfile<<"协方差矩阵:\n";for( i =0; i<nBand; i++){for(j =0; j<nBand; j++){outfile<<vec_covariation_double[i][j]<<" ";}outfile<<'\n';}return 0;}n";return 1;}int num;infile>>num;vector<POINT>vec_double;int i=0;while(i<num){double x;double y;infile>>x>>y;POINT point;= x;= y;(point);i++;}double xMin,yMin,xMax,yMax;xMin = vec_double[0].x;yMin = vec_double[0].y;xMax = vec_double[0].x;yMax = vec_double[0].y;for(i=1; i<num; i++){if(vec_double[i].x<xMin){xMin = vec_double[i].x;}if(vec_double[i].y<yMin){yMin = vec_double[i].y;}if(vec_double[i].x>xMax){xMax = vec_double[i].x;}if(vec_double[i].y>yMax){yMax = vec_double[i].y;}}ofstream outfile("");if(!outfile){cerr<<" open failed.\n";return 1;}outfile<<"外包矩形的坐标为:\n";outfile<<xMin<<"\t"<<yMin<<'\n';outfile<<xMin<<"\t"<<yMax<<'\n';outfile<<xMax<<"\t"<<yMin<<'\n';outfile<<xMax<<"\t"<<yMax<<'\n';ifstream inpointfile("");if(!inpointfile){cerr<<" open failed.\n";return 1;}vector<POINT>vec_point;while(!()){int num;double x;double y;inpointfile>>num>>x>>y;POINT point;= num;= x;= y;(point);}int size = ();for(i=0; i<size; i++){if(vec_point[i].x>xMin && vec_point[i].x<xMax && vec_point[i].y>yMin && vec_point[i].y<yMax) {outfile<<"坐标点"<<vec_point[i].point_num<<"落在矩形外包内部,坐标为:\n";outfile<<vec_point[i].x<<"\t"<<vec_point[i].y<<'\n';}}return 0;}20071:#include<iostream>#include<fstream>#include<vector>using namespace std;struct POINT{n";return 1;}int num;infile>>num;vector<POINT>vec_double;int i=0;while(i<num){double x;double y;infile>>x>>y;POINT point;= x;= y;(point);i++;}double xMin,yMin,xMax,yMax;xMin = vec_double[0].x;yMin = vec_double[0].y;xMax = vec_double[0].x;yMax = vec_double[0].y;for(i=1; i<num; i++){if(vec_double[i].x<xMin){xMin = vec_double[i].x;}if(vec_double[i].y<yMin){yMin = vec_double[i].y;}if(vec_double[i].x>xMax){xMax = vec_double[i].x;}if(vec_double[i].y>yMax){yMax = vec_double[i].y;}}ofstream outfile("");if(!outfile){cerr<<" open failed.\n";return 1;}outfile<<"外包矩形的坐标为:\n";outfile<<xMin<<"\t"<<yMin<<'\n';outfile<<xMin<<"\t"<<yMax<<'\n';outfile<<xMax<<"\t"<<yMin<<'\n';outfile<<xMax<<"\t"<<yMax<<'\n';ifstream inpointfile("");if(!inpointfile){cerr<<" open failed.\n";return 1;}vector<POINT>vec_point;while(!()){int num;double x;double y;inpointfile>>num>>x>>y;POINT point;= num;= x;= y;(point);}int size = ();for(i=0; i<size; i++){if(vec_point[i].x>xMin && vec_point[i].x<xMax && vec_point[i].y>yMin && vec_point[i].y<yMax) {outfile<<"坐标点"<<vec_point[i].point_num<<"落在矩形外包内部,坐标为:\n";outfile<<vec_point[i].x<<"\t"<<vec_point[i].y<<'\n';}}return 0;}20072:#include<iostream>#include<fstream>#include<vector>using namespace std;typedef vector<vector<int> >VecInt;const int R = 256;const int L = 256;struct Table{int x;double y;Table(){x = 0;y = ;}};int main(){int i, j;double a,b;ifstream infile("", ios::in|ios::binary);if(!infile){cerr<<" open failed.\n";return 1;}n";return 1;}for(i=0; i<R; i++){for(j=0; j<L; j++){for(int k=0; k<255; k++){if(vec_int[i][j]==vecTable[k].x){unsigned char c;c = vecTable[k].y;((char*)&c, sizeof(char));outfile<<" ";}}outfile<<'\n';}}return 0;}2008:#include<iostream>#include<fstream>#include<vector>#include<algorithm>#include<numeric>using namespace std;int main(){ifstream infile("");ofstream outfile("");if(!infile){cout<<" open failed"<<endl;}if(!outfile){cout<<" open failed"<<endl;}int total = 0;infile>>total;vector<double>vec_double;vector<double>vec_square;double numeric = ;int i =0;while(i<total){infile>>numeric;(numeric);(numeric*numeric);i++;}sort(),());double average = accumulate(),(),/total;double sum_square = ;for(i=0;i<total;i++){sum_square+=(vec_double[i]-average)*(vec_double[i]-average);}double variance = sum_square/total;outfile<<"the max score is:"<<vec_double[total-1]<<endl;outfile<<"the min score is:"<<vec_double[0]<<endl;outfile<<"the average score is: "<<average<<endl;outfile<<"the variance is:"<<variance<<endl;();();return 0;}2009:#include<iostream>#include<fstream>#include<string>#include<algorithm>using namespace std;int main(){string s;ifstream infile("");ofstream outfile("");if(!infile){cout<<" open failed"<<endl;return 1;}if(!outfile){cout<<" open failed"<<endl;return 1;}n";return 1;}ofstream outfile("");if(!outfile){cerr<<" open failed.\n";return 1;}(3);int num;infile>>num;int i;int j;VecPoint vecpoint(num);double numeric1(0);double numeric2(0);char c1(0);char c2(0);for(i=0; i<num; i++){for(j=0;;j++){infile>>numeric1>>c1>>numeric2;POINT point;= numeric1;= numeric2;vecpoint[i].push_back(point);if(j!=0 && vecpoint[i][j].x==vecpoint[i][0].x && vecpoint[i][j].y==vecpoint[i][0].y){break;}infile>>c2;}}vector<double>vec_area;vector<double>vec_grith;for(i=0; i<num; i++){double area = polygonarea(vecpoint[i]);(area);double grith = polygongirth(vecpoint[i]);(grith);}double minArea = vec_area[0];int minAreaID;double maxArea = vec_area[0];int maxAreaID;double minGrith = vec_grith[0];int minGrithID;double maxGrith = vec_grith[0];int maxGrithID;for(i =0; i<num; i++){if(vec_area[i]<minArea){minArea = vec_area[i];minAreaID = i;}if(vec_area[i]>maxArea){maxArea = vec_area[i];maxAreaID = i;}if(vec_grith[i]<minGrith){minGrith = vec_grith[i];minGrithID = i;}if(vec_grith[i]>maxGrith){maxGrith = vec_grith[i];maxGrithID = i;}}outfile<<"第"<<maxAreaID<<"多变形面积最大"<<fixed<<maxArea<<'\n'; outfile<<"第"<<minAreaID<<"多变形面积最小"<<fixed<<minArea<<'\n'; outfile<<"第"<<maxGrithID<<"多变形周长最长"<<fixed<<maxGrith<<'\n'; outfile<<"第"<<minGrithID<<"多变形周长最小"<<fixed<<minGrith<<'\n';double sumArea = accumulate(), (), ;double averageArea = sumArea/num;double sumDeviation = ;double staDeviation;for(i=0;i<num;i++){sumDeviation += (vec_area[i]-averageArea)*(vec_area[i]-averageArea);}double sumStadardDevitation = sqrt(sumDeviation/num);int a=0;int b=0;int c=0;int d=0;for(i=0;i<num;i++){if(vec_area[i]>(averageArea + sumStadardDevitation)){a++;}if((vec_area[i]<(averageArea + sumStadardDevitation))&&(vec_area[i]>averageArea)){b++;}if((vec_area[i]<averageArea)&&(vec_area[i]>(averageArea - sumStadardDevitation))){c++;}if(vec_area[i]<(averageArea - sumStadardDevitation)){d++;}}outfile<<"A类"<<a<<'\n';outfile<<"B类"<<b<<'\n';outfile<<"C类"<<c<<'\n';outfile<<"D类"<<d<<'\n';return 0;}- vec_point[i].y)*(vec_point[i+1].x + vec_point[i].x)/2);}return polygon_area;}- vec_point[i].y)*(vec_point[i+1].y - vec_point[i].y) + (vec_point[i+1].x - vec_point[i].x)*(vec_point[i+1].x - vec_point[i].x);polygon_grith += sqrt((double)grith);}return polygon_grith;}20112#include<iostream>#include<fstream>#include<vector>#include<>using namespace std;struct POINT{int x;int y;POINT(){x = 0;y = 0;}};int main(){const double distance = 4;int num;num =0;double dis = ;ifstream infile("");if(!infile){cout<<" open failed"<<endl;return 1;}infile>>num;vector<vector<struct POINT> >PtrVector(num);vector<POINT>p(num);for(int i = 0; i<num; i++){infile>>p[i].x>>p[i].y;}();PtrVector[0].push_back(p[0]);-PtrVector[j].at(0).x)*(p[i].x -PtrVector[j].at(0).x)+(p[i].y -PtrVector[j].at(0).y)*(p[i].y -PtrVector[j].at(0).y));}double Min = d[0];int m = 0;for(int j = 0;j<n;j++){if(Min>d[j]){Min = d[j];m=j;}}if(Min>distance){PtrVector[n].push_back(p[i]);n++;}else{PtrVector[m].push_back(p[i]);struct POINT point;for(int i =0; i<PtrVector[m].size();i++){+= PtrVector[m].at(i).x;+= PtrVector[m].at(i).y;}= PtrVector[m].size();= PtrVector[m].size();PtrVector[m][0].x = ;PtrVector[m][0].y = ;}}ofstream outfile("");if(!outfile){cout<<" open failed"<<endl;}for(int i = 0; i<n; i++){outfile<<'('<<PtrVector[i].at(0).x<<','<<PtrVector[i].at(0).y<<")的坐标为:"<<endl;for(int j = 1; PtrVector[i].size();j++){outfile<<PtrVector[i].at(j).x<<','<<PtrVector[i].at(j).y<<' ';}outfile<<endl;}();return 0;}。
2003-2010:名词解释:2003年1、 光谱反射率:物体的反射辐射通量与入射辐射通量之比: E E ρλλλρ= 物体的反射波谱限于紫外、可见光和近红外,尤其是后两个波段。
一个物体的反射波谱的特征主要取决于该物体与入射辐射相互作用的波长选择 .影响地物光谱反射率变化的因素有太阳位置、传感器位置、地理位置、地形、季节、气候变化、地面湿度变化、地物本身的变异、大气状况等。
2、 辐射温度:如果实际物体的总辐射出射度(包括全部波长)与某一温度绝对黑体的总辐射出射度相等,则黑体的温度称为该物体的辐射温度。
根据斯忒藩 - 玻尔兹曼定律,绝对黑体的辐射出射度与热力学温度的 4 次方成正比,由此可确定物体的辐射温度。
由于一般物体都不是黑体,其发射率总是小于 1的正数,故物体的辐射温度总是小于物体的实际温度,物体的发射率越小,其实际温度与辐射温度的偏离就越大。
3、 大气窗口:通过大气后衰减较小,透过率较高,对遥感十分有利的电磁辐射 波段通常称为“大气窗口”.(1)0.30 ~ 1.15m μ大气窗口:是遥感技术应用最主要的窗口之一。
其中 0.3~0.4m μ近紫外窗口,透射率为70%0.4~0.7m μ可见光窗口,透射率约为95%0.7~1.10m μ近红外窗口,透射率约为80%(2)1.3~2.5大气窗口:属于近红外波段1.3~1.9m μ窗口,透射率为60%-95 %1.55~1.75m μ透射率高2.0~2.5m μ窗口,透射率为80%(3)3.5~5.0m μ大气窗口:属于中红外波段,透射率约为60~70%(4)8~14m μ热红外窗口,透射率为80%左右(5)1.0mm~1m 微波窗口,透射率为35%~100%4、 太阳同步轨道:卫星轨道与太阳同步,是指卫星轨道面与太阳地球连线之间在黄道面内的夹角,不随地球绕太阳公转而改变。
地球对太阳的进动一年为360°。
因此平均每天的进动角为0.9856°。

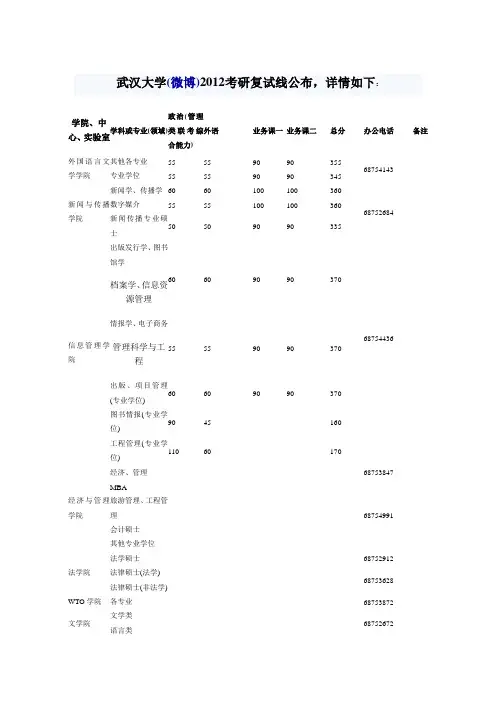
武汉大学(微博 考研复试线公布, 武汉大学 微博)2012考研复试线公布,详情如下: 微博 考研复试线公布政治 ( 管理学院、 学院、中学科或专业(领域 学科或专业 领域) 类 联 考 综 外语 领域 业务课一 业务课二 总分 办公电话 备注实验室 心、 实验室合能力) 合能力 外 国 语 言 文其他各专业 学学院 专业学位 55 55 55 55 60 55 50 90 90 100 100 90 90 90 100 100 90 355 68754143 345 360 360 68752684 学院 新闻传播专业硕 50 士 出版发行学、 图书 馆学 60 60 90 90 370 335 新闻学、传播学 60 新 闻 与 传 播数字媒介 55档案学、 信息资 源管理情报学、 电子商务 68754436 信 息 管 理 学 管理科学与工 55 院 55 90 90 370程出版、项目管理 (专业学位) 图书情报(专业学 90 位) 工程管理(专业学 110 位) 经济、管理 MBA 经 济 与 管 理旅游管理、 工程管 学院 理 会计硕士 其他专业学位 法学硕士 法学院 法律硕士(法学) 68753628 法律硕士(非法学) WTO 学院 文学院 语言类 各专业 文学类 68752672 68753872 68752912 68754991 68753847 60 170 45 160 60 60 90 90 370汉语国际教育(专 业学位) 教育硕士、 学科教 育(语文)(专业学位)考古学 中国史、世界史 55 55 185 300历史学院(涉古方向外语 55 降5分)50 50 55 50 位)6020032568753810专业学位 哲学各专业 哲学学院 心理学专业 各专业(含专业学 艺术学系50 50 55 50185 90 185 90 90 90305 330 68753566 340 325 68752126政 治 与 公 共其他各专业 管理学院 公共管理硕士 50 50 50 50 40 50 50 50 55 55 170 90 90 90 90 90 160 90 90 90 90 90 300 68772118 院 专业学位 社会学 290 335 350 68756650 专业学位 50 55 55 学 总分 达到 360 分及 数 学 与 统 计各专业(含专业学 50 学院 位) 上 , 外语 可降 5分 物 理 科 学 与其他各专业 技术学院 专业学位 45 45 45 45 50 90 90 90 90 90 90 320 68752993 300 320 68752469 化 学 与 分 子各专业(含专业学55 50 2门业务课之和185 300 68754907 以 340 360 68752507 300 68754460教 育 科 学 学其他各专业人类学、民俗学 50社会 学系其他各专业 马克 思 主义 发展与教育心理 学院科学学院位) 45 45 45 45 90 90 90 90 310 68756369 300生 命 科 学 学其他各专业 院 专业学位 人文地理学、 自然 地理学50509090350土地资源管理50 50 50 息系统 地图制图学与地 50 理信息工程 工程硕士 公共管理 其他各专业 水 利 水 电 学水利工程(艰苦行 50 院 业) 专业学位 电 气 工 程 学各专业(含专业学 55 院 位) 55 学院 位) 艺术学 建筑学 城市 设 计学 计算机科学与技 院 术 专业学位 工程力学、 固体力 50 学 土 木 建 筑 工其他各专业 程学院 50 50 50 45 50 50 50 85 85 85 80 85 85 90 90 90 90 315 68772229 建筑与土木工程、 50 项目管理 工程管理硕士 其他各专业 90 50 300 160 310 310 305 68775536 45 90 90 300 68775476 55 90 90 330 68772271 动 力 与 机 械各专业(含专业学 55 90 90 340 68772279 50 50 90 90 320 50 90 90 330 68772339 50 90 50 45 50 50 90 90 85 85 290 170 340 50 90 90 330 50 50 50 90 90 90 90 90 90 320 340 345 68778676环境科学 资 源 与 环 境环境工程 科学学院 地图学与地理信通信与信息系统 50 模式识别与智能 计算机学院 系统 专业学位(计算机 50 技术) 50508580310专业学位(电子与 50 通信工程) 通信与信息系统、 电路与系统 55 55 90 90 355 50 85 85 310信号与信息处 理、测试计量技术及 仪器、 精密仪器及 50 机械、 检测技术与 电子 信 息学 自动化装置 院 空间物理学、 空间 检测与信息处理 技术、无线电物 理、 电磁场与微波50 50 90 90 320 68778464 50 85 90 320技术、 物理 电子学50 50 90 90 325专业学位 摄影测量与遥感模式识别与智遥感 信 息工 程学院 地图学与地理信 息系统 专业学位 其他各专业 测绘学院 专业学位 服务科学 国际 软 件学 数字媒介 院 软件工程 其他各专业 印刷 与 包装 图像传播工程 系 专业学位 医学各专业 基础医学院 理学各专业 第 一 临 床 学临床医学(含专业 55 院 学位) 55 180 310 88041911 50 50 90 90 300 50 50 50 50 90 175 90 300 300 68759310 50 45 85 80 300 68778435 国家线 50 50 90 90 340 50 50 90 90 335 55 55 90 90 340 68778100 68778815能系统6877824368778109药学(含专业学位) 50 护理学(学术型) 护理(专业学位) 第 二 临 床 学各专业(含专业学 55 院 位) 各专业(含专业学 口腔医学院 位) 公 共 卫 生 学各专业(含专业学 50 院 位) 中药学 药学院 药学 专业学位 HOPE 护 理护理学 学院 专业学位 大地测量学与测 卫星 导 航定 绘工程 位技 术 研究 电路与系统、导 中心 航、制导与控制 地图学与地理信 测绘 遥 感信 息系统 息工 程 国家 其他各专业 重点实验室 专业学位 国际 问 题研 各专业 究院 中国古代文学 中国 传 统文 中国文化史 化研究中心 中国哲学 中国 中 部发 各专业 展研究院 中国 边 界研 各专业 究院 地图制图学与地 中国 南 极测 理信息工程 绘研究中心 其他各专业 少数 民 族骨 各专业 干计划 国家线 50 50 50 50 50 50 50 50 55 50 55 55 5050 55 50 5590 180 175 18090305 310 305 310 67812829—88884551803208768610550 50 50 50 55 50 50180 180 90 90 180 175 85 85 90 90300 305 305 305 310687586486875999668759710 305 330 68778595—15 50 85 85 31550 50 5090 90 9090 90 90340 68778525 325 320 6875672668753821687520666875672668778030武汉大学2011年考研复试分数线考试吧首发 武汉大学2011年考研复试分数线考试吧首发。
2012年武大工程管理专业课复试体会和试题回忆前段时间终于收到学校的录取通知书,回想自己备考的过程,感受颇多,由于自己是跨专业,而且工作多年,英语政治基本忘完,复习很辛苦。
备考的童鞋都明白,网上下载的相关文档是不适合备考武大的,我下载了N多文档,但是基本上都没有用到,范围和侧重点都不一样,初试还可以找到往年的试卷(在研究生院买复印版)做参考,但是复试的试题和情况只能靠参考人具体回忆,很难弄到试卷。
言归正传,我具体回忆一下复试的情况。
复试的地点是在一个老教学楼里面,考场很陈旧,说实话,感觉像是在等待一场中学生的平时测验,彼此熟悉的童鞋(当然是应届生喽)在一起说说笑笑,还有童鞋临时翻书背记的,心情倒是蛮放松的,不过开考了还是蛮正规的,资料全部都没收,监考老师也不少,一个小小的考场有3个老师转来转去,基本没有作弊的机会,不过座位是随便坐的,只要保持距离没有嫌疑就OK。
看到题目有点傻眼,难度的侧重点和初试正好相反,2012年初试的工程经济前面的名词解释和问答论述都比较简单,后面4道大题比较费劲,以我的水平每道题很难得到满分,特别是有一题需要画表格的算很多参数太浪费时间,结果初试专业分数比较低,幸好有前面题目的打底,也不至于太低。
容我详细说一下,复试还是四种题型,名词解释、问答、论述和计算题,计算题前面说了,比较简单,第一题一张断面尺寸图,计算预留土量和弃土量,第二题知识点是预应力筋张拉里面的,第三题是计算成倍流水节拍的。
每题10分,对于学这个专业的基本都能拿下。
前面的小题考完后我就回忆出来记在了纸上,在这里与大家分享一下,大家掂量一下究竟偏不偏。
名词解释。
1.管涌冒砂;2.逐排打桩法;3.砌块排列图;4.钢筋配料;5.无粘结预应力混凝土。
每题6分。
问答题。
1.吊车梁的吊装平面位置校正的方法,还考了一个边吊边校法;2.路堑开挖纵挖法有哪几种,具体解释混合开挖法;3.流水步距的原则;4.施工阶段单位工程的程序原则;5.大体积混凝土结构浇筑产生裂痕的原因。
遥感2012 考题名词解释1目视解译 2玻尔兹曼定律 3遥感 4辐射通量密度 5主动遥感 6无选择性散射简答1微波遥感的优点2简要说明四个分辨率3目视解译应注意影像的哪些图像特征4什么是真彩色图像,假彩色图像5几何校正的目的,多项式矫正法的步骤(2012武大人文地理)叙述卫星遥感图像多项式拟合法精纠正处理的原理和步骤遥感图像多项式拟合法精纠正处理的原理:回避成像的空间几何过程,直接对图像变形的本身进行数学模拟。
遥感图像的几何变形由多种因素引起,其变化规律十分复杂。
为此把遥感图像的总体变形看作是平移、缩放、旋转、偏扭、弯曲以及更高次的基本变形的综合作用结果,难以用一个严格的数学表达式来描述,而是用一个适当的多项式来描述纠正前后图像相应点之间的坐标关系。
多项式拟合法精纠正处理的原理和步骤如下:(1)根据图像的成像方式确定影像坐标和地面坐标之间的数学模型。
(2)根据所采用的数字模型确定纠正公式。
(3)根据地面控制点和对应像点坐标进行平差计算变换参数,评定精度。
4)对原始影像进行几何变换计算,像素亮度值重采样。
6大气对太阳辐射的影响7数字化?数字化过程?论述1什么是图像融合(2012武大自然人文地理)将同一时间获取的同一地区的TM多光谱图像与SPOT雷达图像用数字处理方法进行融合有何意义?如何进行?(请图文结合说明)意义:将多源遥感图像按照一定的算法,在规定的地理坐标系,将不同传感器获取的遥感影像中所提供的各种信息进行综合, 生成新的图像。
提高对影像进行分析的能力(通过融合既提高多光谱图像空间分辨率,又保留其多光谱特性)。
具体的:①提高空间分辨力②改善配准精度③增强特征④改善分类⑤对多时相图像用于变化检测⑥替代或修补图像的缺陷。
在几何精校正的基础上,雷达图像与多光谱图像进行HIS融合变换的原理与方法.经融合处理后生成的图像,既反映出多光谱图像多光谱信息丰富的特点,又反映出雷达图像上丰富的结构信息,从而大大提高了对地物的识别和判读能力.图像融合技术在地质和矿产勘查中有更广阔的应用空间. 。
武汉大学遥感试题及答案《遥感原理》试题三答案要点一、名词解释(20分)1、多波段遥感:探测波段在可见光与近红外波段范围内,再分为若干窄波段来探测目标。
2、维恩位移定律:黑体辐射光谱中最强辐射的波长与黑体的绝对温度成反比。
黑体的温度越高,其曲线的峰顶就越往左移,即往短波方向移动。
3、瑞利散射与米氏散射:前者是指当大气中的粒子直径比波长小得多的时候所发生的大气散射现象。
后者是指气中的粒子直径与波长相当时发生的散射现象。
4、大气窗口;太阳辐射通过大气时,要发生反射、散射、吸收,从而使辐射强度发生衰减。
对传感器而言,某些波段里大气的投射率高,成为遥感的重要探测波段,这些波段就是大气窗口。
5、多源信息复合:遥感信息图遥感信息,以及遥感信息与非遥感信息的复合。
6、空间分辨率与波谱分辨率:像元多代表的地面范围的大小。
后者是传感器在接收目标地物辐射的波谱时,能分辨的最小波长间隔。
7、辐射畸变与辐射校正:图像像元上的亮度直接反映了目标地物的光谱反射率的差异,但也受到其他严肃的影响而发生改变,这一改变的部分就是需要校正的部分,称为辐射畸变。
通过简便的方法,去掉程辐射,使图像的质量得到改善,称为辐射校正。
8平滑与锐化;图像中某些亮度变化过大的区域,或岀现不该有的亮点时,采取的一种减小变化,使亮度平缓或去掉不必要的燥声”点,有均值平滑和中值滤波两种。
锐化是为了突岀图像的边缘、线状目标或某些亮度变化大的部分。
9、多光谱变换;通过函数变换,达到保留主要信息,降低数据量;增强或提取有用信息的目的。
本质是对遥感图像实行线形变换,使多光谱空间的坐标系按照一定的规律进行旋转。
10、监督分类:包括利用训练样本建立判别函数的学习”过程和把待分像元代入判别函数进行判别的过程。
二、填空题(10分)1、1999年,我国第一颗地球资源遥感卫星(中巴地球资源卫星)在太原卫星发射中心发射成功。
2、陆地卫星的轨道是太阳同步轨道-轨道,其图像覆盖范围约为185-185平方公里。
武汉大学的遥感试题2007年武汉大学摄影测量与遥感考研试题一.名词解释(共八小题,每小题5分,共40分)灰体;方向反射;太阳同步轨道;图像锐化;构像方程;推扫式传感器;光谱特性曲线;哈达玛变换二.判断题(共4小题,每小题2分,共8分;只判断正误)1. 在微波波段,黑体的微波辐射亮度与绝对温度的四次方成正比。
2. 卫星轨道在空间的具体形状位置,可由六个轨道参数来确定。
3. 对于中心投影图像,其成像点的位置取决于地物点入射光线的方向。
4. 在可见光图像上其灰度与辐射功率成函数关系,因此也就与温度和发射率的大小有直接的关系。
三.选择题(共4小题,每小题2分,共8分;单项选择)1.对于SPOT产品,没作任何改正的图像,被称作a.0级产品b.1A级产品c.2 A级产品d.3 A级产品2.按比例拉伸原始图象灰度等级范围,被称作a.直方图均衡b. 线性变换c. 密度分割3.全景投影的影像面是一个a. 平面b. 斜面c. 圆柱面4.植物的反射陡坡主要位于a.蓝光b.绿光c.红光d.近红外四.简答题(共8小题,每小题6分,共48分)1.说明被动遥感主要辐射源的特点。
2.斜距投影对图象的几何特点有什么影响?3.轨道间能进行立体观测的卫星对时间分辨率有何影响(举例说明)?4.光学图象转变为数字图象的实质是什么?5.简述辐射误差。
6.举例说明先验知识在计算机分类中的作用。
7.说明最大似然法分类的实质。
8.多波段影像与光谱响应曲线有什么关系?五.论述题(共3小题,前两小题各15分,后一小题16分,共46分)1.介绍一套你所熟悉的遥感图象处理软件系统。
2.就你熟悉的领域,说明大气窗口的应用。
3.叙述遥感平台的现状与趋势。
武汉大学遥感2006年试题一、概念解释题(共10小题,每小题3分,共30分)1、遥感2、斯忒藩-玻尔兹曼定律3、比辐射率4、无选择性散射5、双向反射比因子6、资源卫星7、红外彩色片8、方位分辨力9、监督分类方法10、高光谱遥感二、分析论述题(共8小题,每题13分,共104分)1、分析大气对辐射传输的影响及遥感器所接收辐射的构成(即有哪些辐射成分进入遥感器)。
2014年复试笔试真题1、分析遥感专题制图优势与关键技术(50)有两本书,叫遥感制图,专题地图制图(就是你参加的那个gis开发做的那类图),现在就是用遥感的方法来制作专题地图,你需要查一下这两本书所涉及的技术。
优势:遥感制图是指通过对遥感图像目视判断或利用图像处理系统对各种遥感信息进行增强与几何纠正并加以识别,分类和制图的过程,遥感图像有航空遥感图像和卫星遥感图像,制图方式有计算机制图和常规制图,目前最多及着重研究的是利用Landsat的MSS图像制图,由于多波段的卫星具有信息量丰富,现势性强,利用它编图周期短等优点,得到了广泛的应用。
传统制图过程中,主要通过调绘,权威部门发布的地理信息,从现有出版物中转绘,GPS跟踪等方法获取地理信息。
可以看出他周期长,无论从外业调绘或GPS跟踪,周期都很长,其次资金花费较大且时间滞后。
相比较制图,遥感制图具有以下特点:1.由于它以丰富的影像细节去表现区域的地理地貌,比单纯使用线划,符号的线划地图信息量丰富,而且生动形象富有表现力。
2.由于它是以简单的线划符号和标志表示形象,无法表示或计量的地物。
弥补了单纯用形象表现地图的不足。
3.遥感地图减少了传统制图的工作量,缩短了地理制图的周期财政性强。
4.遥感图像能快速获取大范围地理信息,成图范围大。
关键技术:1.数据准备(1)地形图地形图是进行遥感影像几何精纠正的坐标参照系,也是重要的基础数据, 包含多种层面的非遥感信息数据.目前常用的地形数据多为数字地图。
对于尚未有数据地图的工作区域,通常收集纸质地图,经过数据扫描,转换为数据地图。
扫描分辨率通常设置为200-400dpi。
扫描图通常存在变形,需要利用GIS软件进行几何校正,已达到制图精度要求。
对于早期或常规方法获得的成果图件,在建立数据库及系统分析前,通常也采用图形扫面方法,经系统处理,将纸质图形转换为数字图形.(2)遥感数据源的选择遥感数据源的选择是整个遥感制图工作中最基本和重要的工作。
武⼤遥感院复试上机题(04-12年)04年⼀、问题1. 现有⼀数组,其元素值见⽂件test.txt ,要求通过编程的⽅法求出这组数中值最⼤的元素、值最⼩的元素和中值元素。
结果通过编程的⽅法写⼊⽂本⽂件中输出。
数据源⽂件的结构说明如下:a) ⽂件中的第⼀⾏为数组中元素总数(不包括⾃⾝所在⾏),第⼀⾏不参与运算。
b) 从第⼆⾏起为数组中的元素取值。
c) 中值,即数组中元素按照⼀定顺序排序后,位于中间的数即为该数组的中值。
如,数组{13,5,8,14,22,37,26,19,11}的中值为14。
⼆、要求1. 程序可以采⽤⾃⼰熟悉的语⾔(VC 、VB 或TC )编写。
2. ⽤180分钟的时间独⽴完成任务。
3. 考试结束需要提交以下材料①提交全部源码及相关⽂件(要求源码可以运⾏)②算法实现的核⼼代码及结果以独⽴⽂件(⽂本⽂件)上交。
③提交使⽤说明⽂档⼀份(要求在该说明的指导下可以得出对应的结果)。
说明:类同代码,每⼈各从其总得分钟扣除20分。
05年请⽤VC 、VB 或其他⾼级程序设计语⾔编写以下程序。
1. 编写卷积运算函数;2. 编写调试程序从磁盘的数据⽂件“SourceData.txt ”中读⼊10000个数据,先理解为125×80的矩阵,使⽤卷积矩阵1进⾏卷积,再理解为100×100的矩阵,使⽤卷积矩阵2进⾏卷积。
----010151010 ??------------001000121012162101210001003. 计算结果以⽂本⽂件格式存放到⾃⼰新建的结果⽂件中。
备注:卷积,⽤卷积模板B (l ×k )对A 矩阵(m ×n )进⾏卷积卷积矩阵1卷积矩阵2mn m m n n a a a a a a a a a 212222111211?lk l l k k b b b b b bb b b 212222111211 卷积结果为:jj ii l ii k jj jj kj ii l i ij b a c ,112,2?=∑∑==+-+- 例:由卷积模板B (3×3)对A 矩阵(5×6)进⾏卷积得到结果矩阵CBC 中的元素c 33为:33443243314223342233213213241223112233b a b a b a b a b a b a b a b a b a c ?+?+?+?+?+?+?+?+?=06年请⽤VC 或C 编写以下程序:正态分布随机数的产⽣。
遥感真题答案解析考研遥感专业课真题与课后题答案解析第一套真题答案遥感:是20世纪60年代发展起来的对地观测的综合性探测技术, 有广义理解和狭义理解;广义理解:泛指一切无接触的远距离探测, 包括对电磁场、力场、机械波等探测;狭义理解:利用探测仪器, 不与探测目标相接触, 从远处把目标的电磁波特性记录下来, 通过分析, 揭示目标物的特征性质和动态变化的综合性探测技术。
遥感平台:搭载传感器的工具, 按高度分类, 可以分为地面平台、航空平台和航天平台。
大气窗口:指电磁波通过大气层时较少被反射、散射和吸收的, 透过率较高的波段。
反射波谱:指地物反射率随波长的变化规律, 通常用平面坐标曲线表示, 横坐标表示波长, 纵坐标表示反射率, 同一物体的波谱曲线反映出不同波段的不同反射率, 将此与遥感传感器的对应波段接收的辐射数据相对照, 可以得到遥感数据与对应地物的识别规律。
太阳同步轨道:卫星轨道面与太阳和地球连线之间在黄道面内的夹角, 不随地球绕太阳公转而改变, 该轨道叫~BIL格式:逐行按波段次序排列的格式。
波谱分辨率:指卫星传感器获取目标物的辐射波谱信号时, 能分辨的最小波长间隔, 间隔越小, 分辨率越高。
米氏散射:当大气中粒子的直径与辐射的波长相当时发生的散射, 这种散射主要大气中的微粒引起, 例如气溶胶、小水滴。
散射强度与波长的二次方成反比, 并且向前散射强度大于向后散射强度, 具有明显的方向性。
合成孔径雷达:指利用遥感平台的前进运动, 将一个小孔径的天线安装在平台的侧方, 以代替大孔径的天线, 提高方位分辨力的雷达。
SAR的方位分辨力与距离无关, 只与天线的孔径有关。
天线孔径愈小, 方位分辨力愈高。
图像锐化:又叫图像增强, 是增强图像中的高频成分, 突出图像的边缘信息, 提高图像细节的反差, 图像锐化处理有空间域与频率域处理两种。
1、黑体辐射的特性。
与曲线下面积成正比的总辐射出射度是随温度的增加而迅速增加, 满足斯忒潘-波尔兹曼定律, 即黑体总的辐射出射度与温度四次方成正比MT,作用:对于一般物体来讲, 传感器探测到的辐射能后就可以用此公式大致推算出物体的总辐射能量或绝对温度。
2012年武大遥感院复试(回忆)
1.简述数字摄影测量学的现状,制约其发展的问题和未来发展方向
2.软件需求分析的作用以及过程,对需求工程的理解
3.GIS与RS、GPS结合可以产生很多的应用系统,请举例说明这些系统,并说明GIS、RS、
GPS在其中的作用
4.遥感接受到的信号分为那几部分,地表物体信息传输到传感器要经历什么过程,遥感现
在应该深入研究哪方面的问题,为什么
5一道高数的题,由于本人复习复试的时候再也没看数学,就没做,所以就忘了什么样了……
(本年没有线性代数题)
上机题:给出一个TXT文档中有若干字母和字符,编程统计字母(不区分大小写,即‘a’=‘A’)的出现次数,并按从大到小的顺序输出在result.txt,输出格式为“字母出现
次数”
完了,就记得这些了,这些可是我做了28小时无座硬板回到家后强支撑身体写下的,希望
对未来的学生有所帮助……也希望今年考研的同学都能有个好的结果。
2012年复试笔试(一般是摄影测量+遥感+GIS+计算机+高数各一题,任选三题)
1.摄影测量几何定位的的过程
2.高光谱分辨率、高空间分辨率、高时间分辨率遥感卫星应用实例及原因
3.空间地形建模、空间建筑建模、地下空间建模等的关键技术和应用
4.关于计算机的,没做也没记住题目
5.数学是一个曲面积分题,求体积和表面积,不是很难,但公式忘了,所以没做
机试:是一个二维排序的问题,没运行出来,悲催!!!
英语口语(是从n个问题中随便抽出一个,我看问题不少,有两页纸):你怎么看待大学生在校外租房子这一现象?
另有(从其他同学打听来的):你怎么看待学生自杀这个现象?
面试:1.自我介绍
2.提问
(1)你对武汉大学看法如何?为何报考?
(2)兴趣是什么?运动方面的也可以
(3)是否已联系导师?
(4)如果不被录取你有何打算?
这总结得有点多,其实一般就三个,面试最简单,但拿的分却不多
考研网上分享的资料给了我很大帮助,希望我写的这些东西对未来的学生有所帮助,祝你们考研成功!。