飞行器结构力学课后习题答案第2章
- 格式:pdf
- 大小:1.05 MB
- 文档页数:10
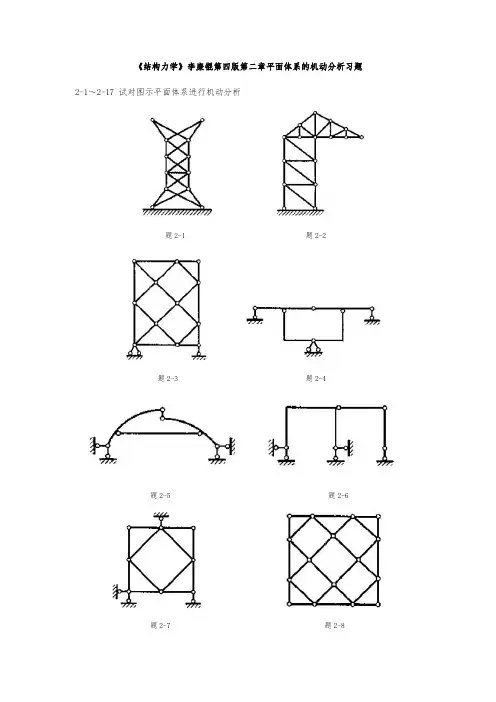
《结构力学》李廉锟第四版第二章平面体系的机动分析习题2-1~2-17试对图示平面体系进行机动分析题2-1题2-2题2-3题2-4题2-5题2-6题2-7题2-8题2-9(a、b处非结点)题2-10(k处非结点)题2-11题2-12题2-13题2-14题2-15(k处非结点)题2-16题2-172-18、2-19添加最少数目的链杆和支承链杆,使体系成为几何不变,而且无多余约束。
题2-18题2-19《结构力学》李廉锟第四版第二章平面体系的机动分析参考答案题2-1说明:自上往下依次拆除二元体,或者自下往上依次添加二元体,故体系为有一个多余约束的几何不变体系(多余约束:中间的横杆或者也可以看成支座上多了一根水平杆)。
题2-2说明:如图所示取刚片1和刚片2,采用二刚片规则(两刚片用一个铰和一根不通过此铰的链杆相联),为几何不变体系,而且没有多余联系。
刚片1由二元体组成,刚片2从大地向上组装二元体组成。
题2-3说明:先不考虑支座的三根链杆,考虑上部几何构造,去掉二元体简化分析,取如上图所示刚片1、刚片2和刚片3。
刚片1和刚片2通过一个实铰联结;刚片1和刚片3通过两根平行链杆联结,交于无穷远处;刚片2和刚片3通过两根平行链杆联结,交于无穷远处;三铰不共线,故上部无多余约束且几何不变。
最后上部与大地通过一个铰和一根不通过此铰的链杆相联,故整个体系为无多余约束的几何不变体系。
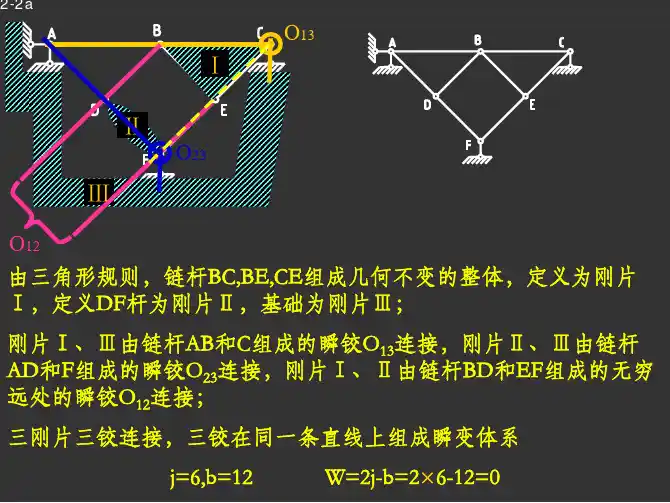
题2-4说明:如上图所示取刚片1、刚片2和刚片3,刚片1和刚片2交于铰12O ,刚片1和刚片3交于铰13O ,刚片2和刚片3交于铰23O ,三铰不共线,故原体系为无多余约束的几何不变体系。
题2-5说明:将大地等效成一根链杆,取如图所示刚片1和刚片2,显然两刚片通过三根链杆相联,且三根链杆既不相互平行也不相交于一点,故原体系为无多余约束的几何不变体系。
题2-6说明:先拆除二元体以简化分析,可知右部分为常变部分;左部分为有一个多余约束的几何不变体系,故体系为几何常变体系。
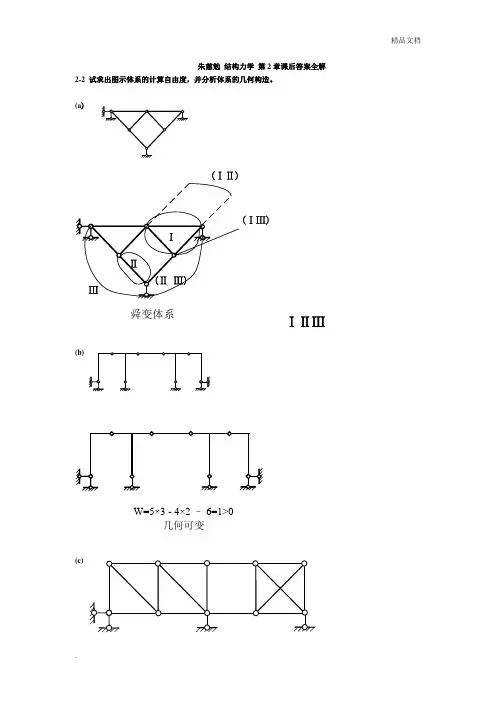
朱慈勉 结构力学 第2章课后答案全解2-2 试求出图示体系的计算自由度,并分析体系的几何构造。
(a)ⅠⅡⅢ(ⅠⅡ)(ⅠⅢ)(Ⅱ Ⅲ)舜变体系`ⅠⅡⅢ(b)W=5×3 - 4×2 – 6=1>0几何可变(c)有一个多余约束的几何不变体系(d)2-3 试分析图示体系的几何构造。
(a)(ⅠⅢ)ⅠⅡⅢ(ⅠⅡ)(Ⅱ Ⅲ)几何不变W=3×3 - 2×2 – 4=1>0可变体系ⅠⅡⅢ(ⅠⅡ)(ⅠⅢ)(ⅡⅢ)几何不变2-4 试分析图示体系的几何构造。
(a)(ⅠⅢ)(ⅠⅡ)(ⅡⅢ)ⅠⅡⅢ几何不变(b)W=4×3 -3×2 -5=1>0几何可变体系ⅢⅠⅡ(ⅠⅢ)(ⅡⅢ)(ⅠⅡ)几何不变(d)(ⅠⅡ)ⅢⅠⅡ(ⅡⅢ)(ⅠⅢ)二元杆有一个多余约束的几何不变体ⅠⅡⅢ(ⅠⅢ)(ⅡⅢ)(ⅠⅡ)舜变体系(f)ⅠⅡⅢ(ⅠⅢ)(ⅡⅢ)(ⅠⅡ)无多余约束内部几何不变ⅠⅡⅢ(ⅠⅢ)(ⅠⅡ)(ⅡⅢ)二元体(h)ⅠⅡⅢ(ⅠⅢ)(ⅠⅡ)(ⅡⅢ)二元体多余约束W=3×8 - 9×2 – 7= -1, 有1个多余约束2-5 试从两种不同的角度分析图示体系的几何构造。
(a)(ⅠⅢ)ⅠⅡⅢ(ⅠⅡ)(ⅡⅢ)舜变体系(b)ⅠⅡⅢ(ⅠⅡ)(ⅡⅢ)(ⅠⅢ)几何不变同济大学朱慈勉 结构力学 第3章习题答案3-2 试作图示多跨静定梁的弯矩图和剪力图。
(a)4P F a2P F a 2P F a M4P F Q34P F 2P F(b)ABCaa aaaF P a DEFF P2m6m2m4m2mABCD10kN2kN/m42020M Q10/326/3410(c)21018018040M1560704040Q(d)3m2m2mA B CEF15kN 3m3m4m20kN/mD 3m2m2m2mA2m 2m2mABCD E FG H 6kN ·m4kN ·m 4kN2m7.5514482.524MQ3-3 试作图示刚架的内力图。

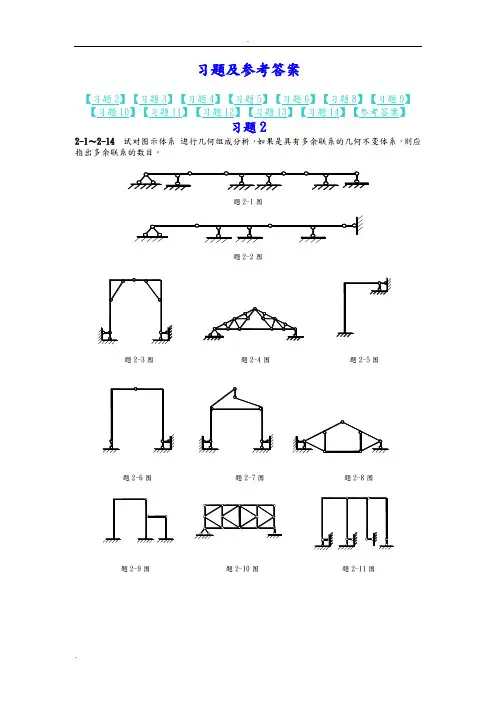
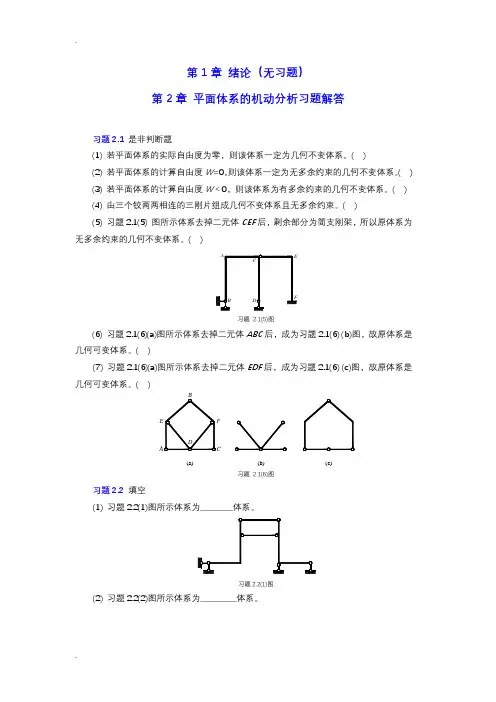
习题及参考答案【习题2】【习题3】【习题4】【习题5】【习题6】【习题8】【习题9】【习题10】【习题11】【习题12】【习题13】【习题14】【参考答案】习题22-1~2-14试对图示体系进行几何组成分析,如果是具有多余联系的几何不变体系,则应指出多余联系的数目。
题2-1图题2-2图题2-3图题2-4图题2-5图题2-6图题2-7图题2-8图题2-9图题2-10图题2-11图题2-12图 题2-13图 题2-14图习题33-1 试作图示多跨静定梁的M 及Q 图。
(b)(a)20kN40kN20kN/m40kN题3-1图3-2 试不计算反力而绘出梁的M 图。
(b)5kN/m40kN(a)题3-2图习题44-1 作图示刚架的M 、Q 、N 图。
(c)(b)(a)20kN /m2kN /m题4-1图4-2 作图示刚架的M 图。
P(e)(d)(a)(b)(c)20k N /m4kN题4-2图4-3 作图示三铰刚架的M 图。
(b)(a)题4-3图4-4 作图示刚架的M 图。
(a)题4-4图4-5 已知结构的M 图,试绘出荷载。
(b)(a)题4-5图4-6 检查下列刚架的M 图,并予以改正。
(e)(g)(h)P(d)(c)(a)(b)(f)题4-6图习题55-1 图示抛物线三铰拱轴线方程x x l lfy )(42-=,试求D 截面的内力。
题5-1图5-2 带拉杆拱,拱轴线方程x x l lfy )(42-=,求截面K 的弯矩。
C题5-2图 题5-3图5-3 试求图示带拉杆的半圆三铰拱截面K 的内力。
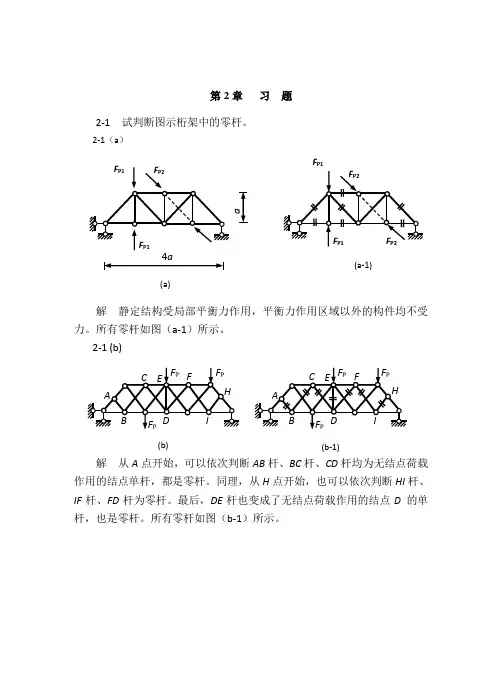
习题66-1 判定图示桁架中的零杆。
(c)(b)题6-1图6-2 用结点法计算图示桁架中各杆内力。
(b)题6-2 图6-3 用截面法计算图示桁架中指定各杆的内力。
(b)题6-3图6-4 试求图示组合结构中各链杆的轴力并作受弯杆件的M 、Q 图。
(a)题6-4图6-5 用适宜方法求桁架中指定杆内力。
(c)(b)(a)题6-6图习题88-1 试作图示悬臂梁的反力V B 、M B 及内力Q C 、M C 的影响线。
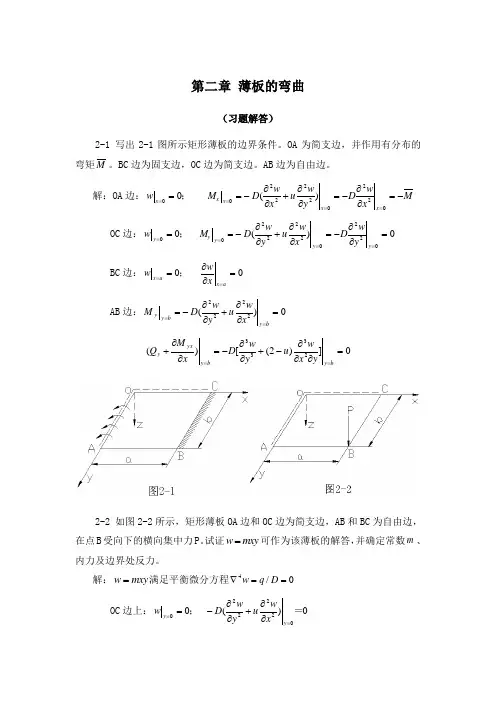
第二章 薄板的弯曲(习题解答)2-1 写出2-1图所示矩形薄板的边界条件。
OA 为简支边,并作用有分布的弯矩M 。
BC 边为固支边,OC 边为简支边。
AB 边为自由边。
解:OA 边:M x w D y w u x w D M w x x x x x -=∂∂-=∂∂+∂∂-======0220222200)(0;OC 边:0)(00220222200=∂∂-=∂∂+∂∂-======y y y y y y wD x w u y w D M w ;BC 边:00=∂∂===ax a x xww ;AB 边:0)(2222=∂∂+∂∂-===b y by yx wu y w D M0])2([)(2333=∂∂∂-+∂∂-=∂∂+==by by yx y y x w u y w D xM Q2-2 如图2-2所示,矩形薄板OA 边和OC 边为简支边,AB 和BC 为自由边,在点B 受向下的横向集中力P 。
试证w mxy =可作为该薄板的解答,并确定常数m 、内力及边界处反力。
解:mxy w =满足平衡微分方程0/4==∇D q wOC 边上:0)(0022220=;==∂∂+∂∂-=y y x wu y w D wOA 边上:0)(0022220=;==∂∂+∂∂-=x x y wu x w D wAB 边上:0])2([0)(23332222=∂∂∂-+∂∂-=∂∂+∂∂-==by b y y x wu y w D x w u y w D ;BC 边上:0])2([0)(23332222=∂∂∂-+∂∂-=∂∂+∂∂-==ax a x y x wu x w D y w u x w D ;在B 点上:P m u D y x wu D by a x -=--=∂∂∂--==)1(2)()1(2,2)1(2u D Pm -=⇒所以)1(2u D Pxyw -=0)(2222=∂∂+∂∂-=y wu x w D M x ;0)(2222=∂∂+∂∂-=x w u y w D M y ;2)1(2P y x w u D M xy-=∂∂∂--= ;02=∇∂∂-=w xD Q x ;02=∇∂∂-=w y D Q y P R R P y x wu D R O C AA ==-=∂∂∂--=;)()1(222-3 如图2-3所示,半椭圆形薄板,直线边界为简支边,曲线边界ACB 为固支边,承受横向载荷0q=q xa 。
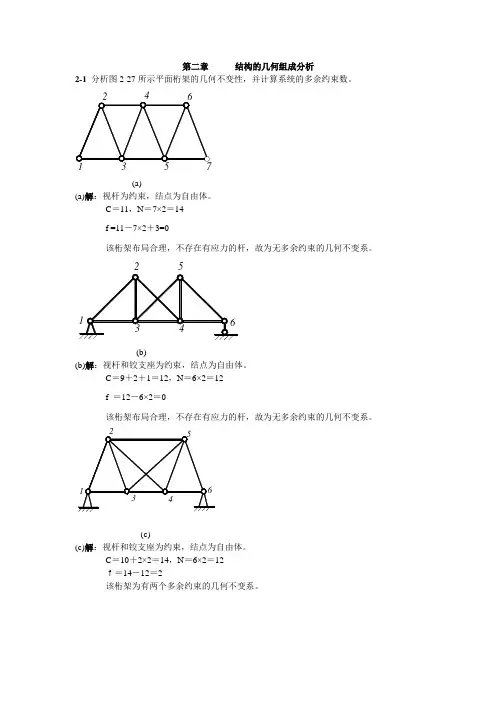
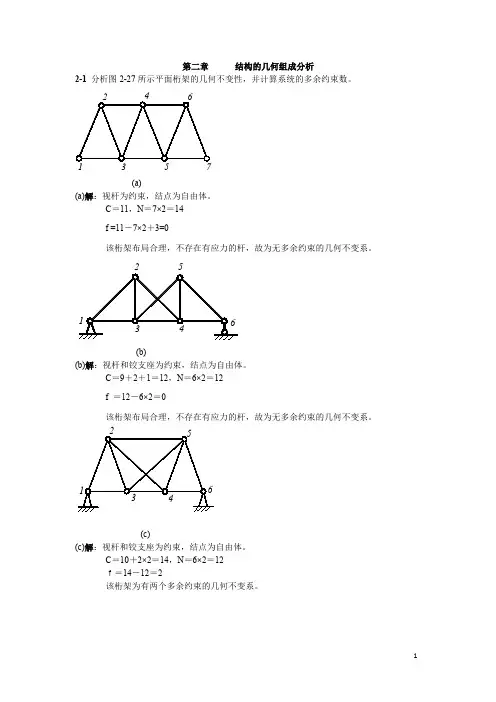
第二章 结构的几何组成分析2-1 分析图2-27所示平面桁架的几何不变性,并计算系统的多余约束数。
3571(a)(a)解:视杆为约束,结点为自由体。
C =11,N =7×2=14f =11-7×2+3=0该桁架布局合理,不存在有应力的杆,故为无多余约束的几何不变系。
(b)(b)解:视杆和铰支座为约束,结点为自由体。
C =9+2+1=12,N =6×2=12f =12-6×2=0该桁架布局合理,不存在有应力的杆,故为无多余约束的几何不变系。
(c)(c)解:视杆和铰支座为约束,结点为自由体。
C =10+2×2=14,N =6×2=12f=14-12=2该桁架为有两个多余约束的几何不变系。
1217(d)(d)解:视杆和铰支座为约束,结点为自由体。
C =30+3=33,N =17×2=34f=33-34=-1故该桁架为几何可变系。
8(e)(e)解:视杆为约束,结点为自由体。
C =13,N =8×2=16f=13-16+3=0将1-2-3-4、5-6-7-8看作两刚片,杆3-6、杆2-7、杆4-5相互平行,由两刚片原则知,为瞬时可变系统。
6(f)(f)解:视杆和固定铰支座为约束,结点为自由体。
C =22+3×2=28,N =14×2=28f=28-28=0将12-13-14、7-11-12、1-2-3-4-5-6-7-8-9-10看作三刚片,三刚片由铰7、铰12、铰14连结,三铰共线,故该桁架为瞬时可变系统。
(g)(g)解:视杆和固定铰支座为约束,结点为自由体。
C=24+4×2=32,N=16×2=32f=32-32=0由于杆15-14-3、杆12-11-4、杆9-5相交于一点,故该桁架为瞬时可变系。
(h)(h)解:视杆和固定铰支座为约束,结点为自由体。
C=12+2×2=16,N=8×2=16f=16-16=0该桁架布局合理,加减二元体之后,无有应力的杆,故该桁架为无多余约束的几何不变系。
习题及参考答案【习题2】【习题3】【习题4】【习题5】【习题6】【习题8】【习题9】【习题10】「习题11】【习题12】【习题13】【习题14】【参考答衆】习题22-1〜2-14试对图示体系进行儿何组成分析,如果是只有多余联系的儿何不变体系,则应指出多余联系的数目。
d5∑° X 厂^τ"βH题2-2图ΓΛ题2-3图题2-5图题2-6图题2-1图H 2-9 图题2-10图题2-11图题2-12图题2-13图习题3试作图示多跨挣定梁的M及Q图。
(a) (b)题3-1图3-2试不计算反力而绘出梁的M图。
题3-2图习题44-1作图示刚架的M、Q、N图。
40fcN 40kN20kNm4-2作图示刚架的M图。
2OkN m SkN mSkXm 40fcN题4-1图4-3作图示三狡刚架的M图。
4-4作图示刚架的M图。
AEmJnIAr lD1题4-2图4-5己知结构的M图•试绘出荷载。
题4-4图3IOkNnlJ^1.5mC(a)题4-3日6erIB9 9题5-1图5-2带拉杆拱,拱轴线方程y= il(l-χ)χ,求截面K 的弯矩。
题5-2图5-3试求图示带拉杆的半圆三狡拱截面K 的内力・4-6检査F 列刚架的M 图,并予以改正。
题4-5图ω∙I ∣ULL∏ ∏ ⅛)题4-6图习题5图示抛物纟戈三铁拱轴线方程y = ff(l-x)x ,试求D 截面的内力。
IkNm15m [ 5m [ ICm 1=3OmC题5-3图习题6 6-1判定图示桁架中的零杆。
题6-1图6-2用结点法计算图示桁架中各杆内力。
(a) FGH月Λ4x4m=16m题6-2图6-3用截面法计算图示桁架中指定各杆的内力。
40kN题6-3图6-4试求图示组介结构中齐链杆的轴力并作受弯杆件的Q图。
2m ] 2m ]lm]lπ⅝] 2m [题6-4图6-5用适宜方法求桁架中指定杆内力。
题6-6图习题88-1试作图示悬臂梁的反力V B 、MB 及内力Q C 、MC 的影响线。
第二章薄板的弯曲2-1 写出2-1图所示矩形薄板的边界条件。
OA为简支边,并作用有分布的弯矩M。
BC边为固支边,OC边为简支边。
AB边为自由边。
Mx解:OA边:wx00;2w2w2wD(2u2)D2x yx0xMx0x0MyOC边:wy00;y02w2w2wD(2u2)D2y xy0yy0BC边:wx a0;wxx aAB边:Myy b2w2w D(2u2)0y xy b Myx x)y b(Qy3w3w D[3(2u)2]0y x yy b2-2 如图2-2所示,矩形薄板OA边和OC边为简支边,AB和BC为自由边,在点B受向下的横向集中力P。
试证w mxy可作为该薄板的解答,并确定常数m、D(2u2)=0y xy0OA边上:wx02w2w0;D(2u2)=0x yx02w2w3w3w0;D[3(2u)2]0 AB边上:D(2u2)y xy b y x yy b2w2w3w3w0;D[3(2u)]0 BC边上:D(2u2)x yx a x x y2x a2w)2D(1u)m P 在B点上:2D(1u)(x yx a,y bm P 2D(1u)所以w Pxy 2D(1u)2w2w2w2wMx D(2u2)0;My D(2u2)0;y x x yMxy2wP D(1u);Qy D2w0 Qx D2w0;x y2y x2wRA2D(1u)()P RC;RO P x yA2-3 有一矩形薄板,边长为a和b。
若其挠度函数为w=Cxy(a-x)(b-y),求该薄板受什么样的载荷和边界的支持条件。
解:w Cxy(a x)(b y)Cabxy Caxy2Cbx2y Cx2y2 w Caby Cay22Cbxy2Cxy2;xw Cabx2Caxy Cbx22Cx2y;y2w2w222Cax2Cx2Cby2Cy;;22y x4w4w4w4C;40;40 x2y2x x由4w q/D24C q/D q8CDx0时:wx00;w x0不是固支边,是简支边x0(Mx)x02w D2x2CD(y2by)Mxx0x a时:wx a0;w x0不是固支边,是简支边x a(Mx)x a2w D2xwy2CDy(b y)Mx x ay0时:wy00;0不是固支边,是简支边y0(My)y02w D2y2CDx(a x)Myy0y b时:wy b0;w y0不是固支边,是简支边y b(My)y b2w D2y2CDx(a x)Myy b2-5 四边简支正方形薄板,边长为a,在板中点受横向载荷P,试求最大挠度。
第二章结构的几何组成分析2-1分析图2-27所示平面桁架的几何不变性,并计算系统的多余约束数。
(a)(a)解:视杆为约束,结点为自由体。
C=11,N=7×2=14f =11-7×2+3=0该桁架布局合理,不存在有应力的杆,故为无多余约束的几何不变系。
(b)(b)解:视杆和铰支座为约束,结点为自由体。
C=9+2+1=12,N=6×2=12f =12-6×2=0该桁架布局合理,不存在有应力的杆,故为无多余约束的几何不变系。
(c)(c)解:视杆和铰支座为约束,结点为自由体。
C=10+2×2=14,N=6×2=12f=14-12=2该桁架为有两个多余约束的几何不变系。
1217(d)(d)解:视杆和铰支座为约束,结点为自由体。
C =30+3=33,N =17×2=34f=33-34=-1故该桁架为几何可变系。
(e)(e)解:视杆为约束,结点为自由体。
C =13,N =8×2=16f=13-16+3=0将1-2-3-4、5-6-7-8看作两刚片,杆3-6、杆2-7、杆4-5相互平行,由两刚片原则知,为瞬时可变系统。
6 (f)(f)解:视杆和固定铰支座为约束,结点为自由体。
C =22+3×2=28,N =14×2=28f=28-28=0将12-13-14、7-11-12、1-2-3-4-5-6-7-8-9-10看作三刚片,三刚片由铰7、铰12、铰14连结,三铰共线,故该桁架为瞬时可变系统。
(g)(g)解:视杆和固定铰支座为约束,结点为自由体。
C=24+4×2=32,N=16×2=32f=32-32=0由于杆15-14-3、杆12-11-4、杆9-5相交于一点,故该桁架为瞬时可变系。
(h)(h)解:视杆和固定铰支座为约束,结点为自由体。
C=12+2×2=16,N=8×2=16f=16-16=0该桁架布局合理,加减二元体之后,无有应力的杆,故该桁架为无多余约束的几何不变系。