自动控制理论(邹伯敏)第四章答案
- 格式:docx
- 大小:406.74 KB
- 文档页数:7
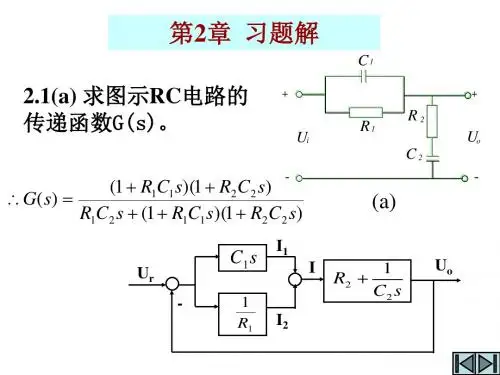
《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
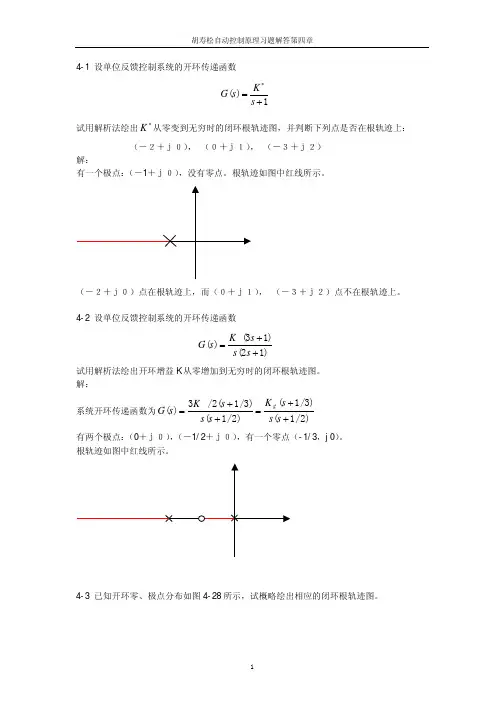
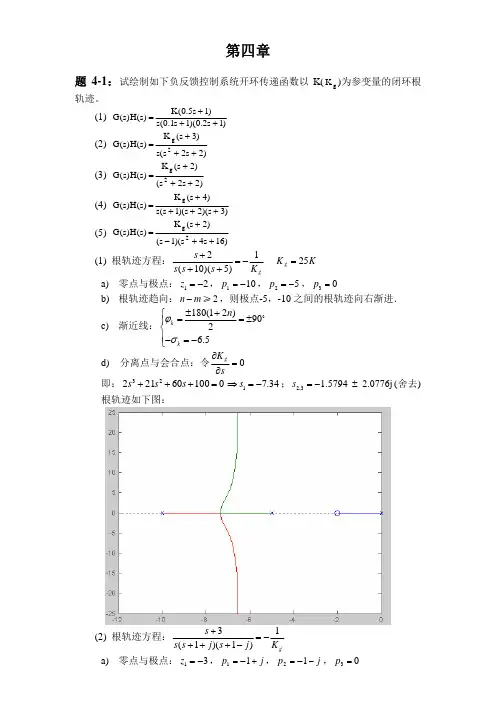
4-1 设单位反馈控制系统的开环传递函数 1)(+=∗s K s G试用解析法绘出∗K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:有一个极点:(-1+j0),没有零点。
根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数 )12()13()(++=s s s K s G 试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。
解:系统开环传递函数为)2/1()3/1()2/1()3/1(2/3)(++=++=s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。
根轨迹如图中红线所示。
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
图4-28 开环零、极点分布图4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): (1) )15.0)(12.0()(++=s s s Ks G解:系统开环传递函数为)2)(5()2)(5(10)(++=++=s s s K s s s Ks g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。
分离点坐标计算如下:051211=++++d d d 3解方程的010142=++d d 7863.31−=d ,d 88.02−=取分离点为88.0−=d根轨迹如图中红线所示。
(2) )12()1()(++=s s s K s G解:系统开环传递函数为)5.0()1()5.0()1(2/)(++=++=s s s K s s s K s g G有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:115.011+=++d d d 解方程的05.022=++d d 7.11−=d ,d 29.02−=取分离点为7.11−=d ,29.02−=d 根轨迹如图中红线所示。
《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
题4-1 (a) (b) (c)
(d) (e) (f)
题4-2 解:
由开环传递函数容易得到3,0n m ==,三个极点分别为1230,42,42p p j p j ==-+=--,因此,有3条根轨迹趋于无穷远,其渐近线倾角为(21)5,,
333
k πππ
θπ+=
=,渐近线与实轴交点为1
1
()()
8
3
n m
l
i
l i A p z n m
σ==----=
=--∑∑。
下面确定根轨迹的分离点和汇合点
2020
12()(0.050.41)00.150.81010
2,3D s s s s K dK s s ds
s s =+++=⇒
=---=⇒=-=-
计算根轨迹的出射角与入射角
2322(arctan())63.4
4
2
63.4
p p p π
θππθθ=---=-=-=
确定根轨迹与虚轴的交点
σ
j ω
O
σ
σ
σ
202
03
00,()(0.050.41)0
0.400080.050s j D s j j K K K K ωωωωωωωωω==-+++=⎧⎧-+==⎧=±⎪⎪⇒⇒⎨⎨⎨==-+=⎪⎪⎩⎩⎩
令特征方程或
σ
题4-5 解:
由开环传递函数容易得到3,0n m ==,三个极点分别为1230,2,4p p p -=-=--=-,因此,有3条根轨迹趋于无穷远,其渐近线倾角为(21)5,,
333
k ππ
π
θπ+=
=,渐近线与实轴交点为1
1
()()
2n m
l
i
l i A p z n m
σ==----=
=--∑∑。
下面确定根轨迹的分离点和汇合点
确定根轨迹与虚轴的交点
02
0300,()(2)(4)0
60004880
s j D s j j j K K
K K ωωωωωωωωω==+++=⎧⎧-+==⎧=±⎪⎪⇒⇒⎨⎨⎨
==-+=⎪⎪⎩⎩⎩令特征方程或
020
12()(2)(4)0312802,233
D s s s s K dK s s ds
s s =+++=⇒
=---=⇒=-+
=--(舍去)
(2)
要产生阻尼振荡,需要00σω<≠且。
当102=3.08s K =-+
,所以,当03.148K <<时,系统呈阻尼振荡。
(3) 当048K =时,系统产生持续等幅振荡,振荡频率为(4)
=0.5arccos 0.5
60
ζββ⇒=⇒=±过s 平面原点,与实轴负方向夹角为60±作射线,与根轨迹的
交点即为主导极点。
由图知,主导极点为0.7 1.2j -±。
又
123123364.6
c c c c p p p p p p p ++=++=-⇒=-
所以
004.6*( 4.62)*( 4.64)07.176
K K --+-++=⇒=
题4-6 解:
(1)由开环传递函数容易得到3,1n m ==,三个极点和一个零点分别为
12310,1,3,2p p p z ==-=-=-,因此,有2条根轨迹趋于无穷远,其渐近线倾角为
(21)3,222
k πππ
θ+==,渐近线与实轴交点为1
1
()()
1n
m
l i l i A p z n m
σ==----==--∑∑。
下面确定根轨迹的分离点和汇合点
02()(1)(3)(2)0(1)(2)10.55
D s s s s K s s s s =++++=⇒++=⇒≈-
σ
(2)
=0.5arccos 0.5
60
ζββ⇒=⇒=±过s 平面原点,与实轴负方向夹角为60±作射线,与根轨迹的
交点即为主导极点。
由图知,主导极点为0.7 1.1j -±。
又
123123342.6
c c c c p p p p p p p ++=++=-⇒=-,
所以
002.6*( 2.61)*( 2.63)( 2.62)02.77
K K --+-++-+=⇒=
题4-9 解:
系统的闭环传递函数32222.50
(1)
10
2.5
s s s Ts Ts T s s s ++++=+⇒+=++,等效开环传递函数为12
(1)
() 2.5
T s G s s s +=
++。
由等效开环传递函数容易得到2,1n m ==,两个极点和一个零点分别为
1211313
,,122j j p p z -+--=
==-,因此,有1条根轨迹趋于无穷远,其渐近线倾角为(21)1k πθπ+==。
下面确定根轨迹的分离点和汇合点
22012() 2.5(1)002 1.50
11D s s s T s dK s s ds s s =++++=⇒=⇒+-=⇒=-=-+
计算根轨迹的出射角与入射角
232
arctan 3161.6
2161.6
p p p π
θπθθ=+-==-=-
σ
题4-12 解:
由开环传递函数容易得到3,0n m ==,三个极点分别为1232p p p ===-,因此,有3条根轨迹趋于无穷远,其渐近线倾角为(21)5,,
333
k πππ
θπ+=
=,渐近线与实轴交点为1
1
()()
2n m
l
i
l i A p z n m
σ==----=
=--∑∑。
下面确定根轨迹的分离点和汇合点
3020
12()(2)03(2)02D s s K dK s ds
s s =++=⇒
=-+=⇒==-
确定根轨迹与虚轴的交点
302
0300,()(2)0
6800864120
s j D s j K K K K ωωωωωωω==++=⎧⎧-++==⎧=±⎪⎪⇒⇒⎨⎨⎨
=-=-=⎪⎪⎩⎩⎩令特征方程(舍去)或
(1) 令064
s
j K ωω⎧=⎪=⇒⎨=⎪⎩(2)
=0.5arccos 0.5
60
ζββ⇒=⇒=±过s 平面原点,与实轴负方向夹角为60±作射线,与根轨迹的交
点即为主导极点。
由图知,主导极点为1-±。
又
123123364
c c c c p p p p p p p ++=++=-⇒=-
所以
300(42)08
K K -++=⇒=
3
08
lim ()()lim
1(2)p s s K G s H s s →→===+
(3) 系统的闭环传递函数可以近似为
212()88
()()()24
c c C s R s s p s p s s ==--++
2222
0.54n n n ζωωζω=⎧=⎧⎪⇒⇒⎨⎨
==⎪⎩⎩
100%16.3%p M e
⇒=⨯=
1.8138p d t s πω⇒=
== 3
5% 34
2% 4s n s n t s
t s
ωζ
ωζ
⇒∆=≈=∆=≈
=。