航空电子设备 二次雷达及应答机
- 格式:ppt
- 大小:10.94 MB
- 文档页数:43

浅谈二次雷达应答机的S模式在终端区的运用赵魏【摘要】随着国家经济和民航事业的发展,传统的A/C模式的雷达在空中交通管理开始出现了一些列的弊端,业界开始注意到了应答机的S模式。
本文主要就S模式较着传统模式存在的一些优势,以及S模式在空中管制工作的实际运行之中存在的一些问题进行了一下讲述。
期待随着技术的发展和建设的完善,能让空管工作更加顺畅和安全。
【期刊名称】《电子制作》【年(卷),期】2014(000)012【总页数】2页(P50-50,51)【关键词】二次雷达;应答机的S模式【作者】赵魏【作者单位】中国民航华北空中交通管理局终端管制中心 100621【正文语种】中文笔者在华北空管局从事空中交通管制工作多年,北京终端管制区在1997年底实行雷达管制,是当年民航总局“九五”建设规划的重要项目之一,更是中国民航史的一次重大技术革命。
作为雷达管制,前提条件就是雷达识别。
在目前终端区的日常指挥中,二次雷达A/C模式是常规手段。
二次雷达包括机载应答机和地面询问机两部分。
机载应答机有一个应答机编码,这个应答机编码如同航空器的“身份证”应答机编码是四位,由0—7八个数字可选,除特殊意义的编码(视飞行不指定应答机的话调定1200,仪表飞行在给定应答机之前调定2000。
7500是被劫机,7600是通讯失效,7700是飞机遇险)以外,有7的四次幂个编码。
地面询问机通过询问应答机的编码确定航空器的“身份”。
在与空管自动化系统飞行计划分配的应答机编码耦合生成一个雷达标牌反应在雷达屏幕上。
一线的管制员通过这个来确定航空器以及获得航空器的相应飞行数据掌握航空器的飞行动态来对空进行指挥。
但近年来随着国内经济的日新月异的高速发展,飞行流量的与日俱增,尤其是在大面积航班延误过后,应答机代码与之前的飞行计划中的应答机编码出现了重码的现象,使得在日常工作雷达识别开始出现了困难,无法证明航空器的“身份”。
在这种情况下,大家开始关注到了应答机的S模式。

二次雷达应答机的故障检测与维修二次雷达应答机的故障检测和维修是维护雷达系统稳定运行的重要任务。
二次雷达应答机是一种用于地面雷达系统中的设备,用于接收并回应来自雷达的信号,以向雷达系统提供目标的相关信息。
在故障检测过程中,首先需要进行外部检查,确保二次雷达应答机的外观完好无损、电源连接稳定,并检查其附近是否有任何可能干扰设备正常工作的电磁源。
然后,通过使用合适的测试仪器,如频谱分析仪和示波器,检测二次雷达应答机的信号输出是否符合预期。
对于常见的故障,例如无信号输出或信号强度低的情况,可以采用以下步骤进行故障排查。
首先,检查二次雷达应答机的天线连接是否松动或损坏。
天线是接收和发射雷达信号的重要部件。
如果天线连接不良或损坏,会导致信号质量下降或完全无信号输出。
其次,检查二次雷达应答机的电源供应是否稳定。
不稳定的电源供应可能导致设备工作不正常。
可以使用示波器来观察电源输出的稳定性,并检查电源线路上是否存在松动的连接。
此外,还应检查二次雷达应答机的接收信号处理单元是否损坏。
接收信号处理单元负责将接收到的信号转换为数字信号并进行处理。
如果该单元损坏,可能会导致信号质量下降或无信号输出。
可以使用示波器来检查接收信号处理单元的工作状态。
如果以上方法无法解决故障,可能需要进一步检查电路板上的元件,例如继电器、变压器等。
这些元件的损坏可能导致设备无法正常工作。
可以使用万用表等工具来进行电路板上元件的测试,并将损坏的元件替换为新的。
在故障修复过程中,应注意遵循安全操作规程,并确保设备断电后再进行拆卸和更换元件的操作,以避免电击风险。
维修完成后,应进行功能测试和信号质量测试,以确保二次雷达应答机能够正常工作,并输出稳定、准确的信号。
如果测试结果仍然不符合预期,可以考虑更换设备或向专业维修人员寻求帮助。
综上所述,二次雷达应答机的故障检测和维修包括外部检查、信号输出检测、天线连接检查、电源供应稳定性检查、接收信号处理单元检查和电路板元件检查等步骤。

电子科技大学硕士学位论文为了求出询问脉冲的频谱特性曲线,编制以下M声T L A B代码对询问脉冲进行仿真,并绘制出频谱特性曲线。
n井200;st印卜0.0000020/n;卜一0.0000010:st印t:0.0000010;帅苛川砂15仪0.0以刃008):汕p1ot(l,2,1),P l ot(t,”,t,zer o s(Si z4t)));ti ti e(,脉宽为0.5林s的矩形脉冲’)st印卜600(沁oo*p沥;卜3000000*P i:steP t:3000000*P i;产0乃仪心阅8*si n C(0.00()0004*t);劝pl ot(l,2,2),Pl ot(仁y,仁zer o s(ai z城t)));ti t i《矩形脉冲对应的频谱.)ylabel(勺.以刃0008*sinc(0.0000()04*t),);xl abel(十二3000()00*Pi~3000000*Pi,);gh d on;图4一l所示为询问矩形脉冲的时域和频域特性曲线。
…’’一犷--一丈丈!!戈..一犷一‘惬黔{{{;………:纂纂___几{{{{{{{{{!!!‘一犷一‘一’’}}}一卜-一徽年年一冬八一秘图4一1矩形脉冲的时域和频域特性曲线矩形脉冲的频谱图中第一个零值点的角频率为竺,取第一个零值点为脉冲的频带宽度。
因为脉冲宽度为0.8脚,所以矩形脉冲的频带宽度为1.25M H z。
如图4一2所示,脉冲宽度为0.8产:的矩形脉冲经射频载波调制后,被搬移到射第四章终端处理模块的设计频频段,以实现远距离无线传输..||J .目:...……图4一2二次雷达的调制原理机载二次雷达应答机在接收询问信号时,接收到的是一个低频询问脉冲序列和高频载波的调制信号,等效于单极性矩形脉冲序列和一个正弦波的相乘.凡,(,)=[艺气g(卜峨)]c os典‘(4礴)式(4·4)中,g (t )是调制信号的时间波形,几为矩形脉冲宽度,矩形脉冲的脉冲宽度为0.8娜,叭为载波频率,a。
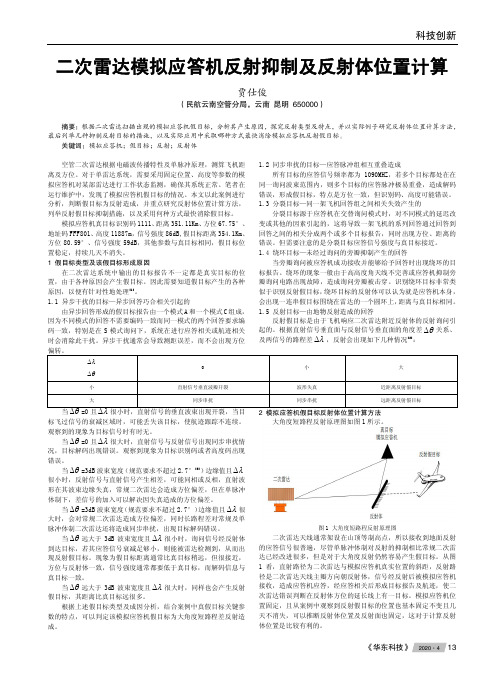
科技创新二次雷达模拟应答机反射抑制及反射体位置计算贾仕俊(民航云南空管分局,云南 昆明 650000)摘要:根据二次雷达扫描出现的模拟应答机假目标,分析其产生原因,探究反射类型及特点,并以实际例子研究反射体位置计算方法,最后列举几种抑制反射目标的措施,以及实际应用中采取哪种方式最快消除模拟应答机反射假目标。
关键词:模拟应答机;假目标;反射;反射体空管二次雷达根据电磁波传播特性及单脉冲原理,测算飞机距离及方位。
对于单雷达系统,需要采用固定位置、高度等参数的模拟应答机对某部雷达进行工作状态监测,确保其系统正常。
笔者在运行维护中,发现了模拟应答机假目标的情况。
本文以此案例进行分析,判断假目标为反射造成,并重点研究反射体位置计算方法,列举反射假目标抑制措施,以及采用何种方式最快消除假目标。
模拟应答机真目标识别码1111、距离351.11Km、方位67.75°、地址码FFF801、高度11887m,信号强度86dB,假目标距离354.1Km、方位80.59°、信号强度59dB,其他参数与真目标相同,假目标位置稳定,持续几天不消失。
1 假目标类型及该假目标形成原因 在二次雷达系统中输出的目标报告不一定都是真实目标的位置,由于各种原因会产生假目标。
因此需要知道假目标产生的各种原因,以便有针对性地处理[1]。
1.1 异步干扰的目标—异步回答巧合相关引起的 由异步回答形成的假目标报告由一个模式A 和一个模式C 组成,因为不同模式的回答不需要编码一致而同一模式的两个回答要求编码一致,特别是在S 模式询问下,系统在进行应答相关或航迹相关时会消除此干扰。
异步干扰通常会导致测距误差,而不会出现方位偏转。
1.2 同步串扰的目标—应答脉冲组相互重叠造成所有目标的应答信号频率都为1090MHZ,若多个目标都处在在同一询问波束范围内,则多个目标的应答脉冲极易重叠,造成解码错误,形成假目标,特点是方位一致,但识别码、高度可能错误。

应答机
应答机(Transponder),是一部能在收到无线电询问信号时,自动对信号做出回应的电子设备。
在航空应用中,应答机主要作为辅助航空交通管制和机上的空中防撞系统(TCAS)使用。
应答机是由英国空军和美国陆军航空队于第二次世界大战中开发的雷达敌我识别系统中演化而来。
20世纪50年代航空界开始使用二次雷达配合应答机进行通用航空和商用航空的航空管制。
在飞行中,航空管制员会通过无
线电通知飞行员分配给他的应答机代号,比如:“东航5101,应答机0363”,之后飞行员在飞机上手动输入应答机代号0363,之后航空管制员的雷达屏幕上就会正确显示该飞机的身份信息。
浅谈二次雷达与单雷达数据源的航迹跟踪技术摘要:二次雷达系统不仅能够作为单雷达系统使用,还可以作为终端处理系统接引单雷达数据,保障空域内的航空安全。
本文对二次雷达与单雷达数据源的航迹跟踪技术进行就介绍,主要介绍了航迹关联防范、斜距-高度的校正方法、航迹跟踪方法、单雷达航迹补充跟踪、高度跟踪和实时质量控制6个功能过程。
关键词:二次雷达;单雷达数据源;航迹跟踪0 概述二次雷达系统能够实时监视空域内的飞行目标,捕获其搭载应答机的下行数据,计算距离方位信息,完成对飞行目标的监视,为其空域范围内的目标提供飞行安全保障。
在实际使用中,一次/二次雷达、ADS-B、MLAT等多种探测设备的探测数据会被统一利用并接引到综合管制系统供航空管制人员进行数据分析与空域使用规划。
当二次雷达系统(以下简称“系统”)作为终端接收单一次雷达数据时,需要结合二次雷达本身的数据源对一次雷达的探测数据进行航迹跟踪。
基本组成如下图所示。
图1单雷达数据源的航迹跟踪组成1 航迹关联方法当系统接收到新的雷达航迹时,需要进行空间一致性转换。
首先将雷达航迹的位置信息换算为大地坐标系的经度、纬度信息,再使用球面方位投影计算,获取以本系统为原点的笛卡尔坐标信息。
系统航迹和雷达航迹完成了空间统一性转换。
此时可以使用直角坐标系的距离门限判断,当其判断结果在判别波门之内的,则视为关联成功,需要完成各自航迹号的关联与记录。
2 斜距-高度校正雷达站附近仅有少数高空目标才斜距-高度校正需要。
距离雷达站较远及飞行高度低的目标斜距、地距相差很小。
因此,在实用系统中可以使用下述简化近似算法:先把雷达航迹的笛卡尔坐标变换成极坐标,得到目标的斜距r h。
再用简单的正射投影关系:近似计算目标地距r,式中C为目标C模式高度。
此式仅在目标距雷达站距离较近时比较精确,这正是我们所需要的。
得到真正的地距r之后,便可直接按比例r/ r h折算出真正的笛卡尔坐标,使用球面方位反投影方法,获得其对应的经纬度信息,再使用反投影法,得到转换后的笛卡尔坐标,经内插外推后,参加加权平均的数据融合计算。
Science &Technology Vision 科技视界二次监视雷达(Secondary Surveillance Radar)广泛用于民用航空空中交通管制领域,为管制员实时提供空中飞机的位置、高度、速度、以及飞机的二次应答机代码。
航管自动化系统通过飞机的二次应答机代码可向管制员提供飞机的航班号、所属航空公司以及该架航班的航路等信息。
这个过程,在航管自动化系统中称为飞行计划与二次应答机代码的关联。
二次监视雷达的工作原理是,地面二次雷达周期性发出询问电脉冲,飞机上的二次雷达应答机收到该询问脉冲后,向地面二次雷达发回一组数据,其中包括飞机的飞行高度、飞行速度和飞机二次应答机代码等信息。
目前飞机的二次应答机代码为一个4位的8进制数(0000-7777),根据国际民航组织(ICAO)的规定,分配给我国可以使用的二次代码为1633个,具体到每一个管制区,如广州区域管制中心,在本情报区内可以使用的二次应答机代码为65个。
随着我国各地机场航班量的快速增长,上述的二次应答机代码数量早已不能满足中国民航的需求,二次应答机代码的重复使用率在目前的航管自动化系统中逐年增加,而由二次应答机代码重码引起的飞机关联错误的问题也呈逐年增加的趋势,这将对飞行安全及管制工作造成一定的影响,下文对该问题危害、出现的原因及解决方法进行详细的分析。
1关联错误对管制员的影响1.1增加管制员的工作量当出现关联错误的问题时,管制员需要进行较繁琐的操作,通过修改飞行计划等措施使航班关联正确。
在由于系统限制等原因无法自动关联时,管制员还需要电话通知所有相关管制单位,塔台管制员甚至还需要电话通知站调取消错误关联航班的起飞报,大大地增加了管制员的工作负荷。
1.2可能带来潜在危险首先,进近、区调管制员对电子进程单的依赖性很强,管制员若不能及时发现航班关联错误有可能导致其掌握的航班信息有误,会造成进近、区调指挥错误,导致出现管制差错。
其次,管制员在进行处理关联错误的操作时,注意力会被分散,削弱其对飞行动态的监控能力,导致管制员工作出现严重的安全隐患。
二次雷达也叫做空管雷达信标系统(ATCRBS:Air Traffic Control Radar Beaco n System)。
它最初是在空战中为了使雷达分辨出敌我双方的飞机而发展的敌我识别系统,当把这个系统的基本原理和部件经过发展后用于民航的空中交通管制后,就成了二次雷达系统。
管制员从二次雷达上很容易知道飞机的编号、高度、方向等参数,使雷达由监视的工具变为空中管制的手段,二次雷达的出现是空中交通管制的最重大的技术进展,二次雷达要和一次雷达一起工作,它的主天线安装在一次雷达的上方,和一次雷达同步旋转。
二次雷达发射的脉冲是成对的,它的发射频率是1030MHz,接收频率是1 090MHz,发射脉冲由P1、P2、P3脉冲组成,P1、P2脉冲间隔恒为2微秒,P1、P3脉冲间隔决定了二次雷达的模式。
目前民航使用的是两种模式,一种间隔为8微秒,称为A模式又称为3/A模式(识别码);另一种间隔21微秒,称为C模式(高度码)。
接收脉冲由16个脉冲位组成,包含目标的高度,代码等内容。
二次雷达系统的另一重要组成部分是飞机上装的应答机,应答机是一个在接受到相应的信号后能发出不同形式编码信号的无线电收发机,应答机在接收到地面二次雷达发出的询问信号后,进行相应回答。
这些信号被地面的二次雷达天线接收,经过译码,就在一次雷达屏幕出现的显示这架飞机的亮点旁边显示出飞机的识别号码和高度,管制员就会很容易地了解飞机的位置和代号。
为了使管制员在询问飞机的初期就能很快地把屏幕上的光点和所对应的飞机联系起来,机上应答机还具有识别功能,驾驶员在管制员要求时可以按下“识别”键,这时应答机发出一个特别位置识别脉冲(SPI),这个脉冲使地面站屏幕上的亮点变宽,以区别于屏幕上的其他亮点。
20世纪70年代初计算机技术和雷达结合实现了航管雷达的全自动化。
这种系统把一次雷达和二次雷达的数据都输入数据处理系统,高速运转的计算机接收三个方面来的数据,第一是一次雷达的雷达信息,第二是二次雷达来的信标信息,并把它转换成数字码,第三是由航管中心输入的飞行进程数据,即飞行计划的各种数据。